

Voilà mon projet : un robot aspirateur DIY.
Base pour sa création : récupération de la structure d'une voiture radiocommandé (nikko max hummer :
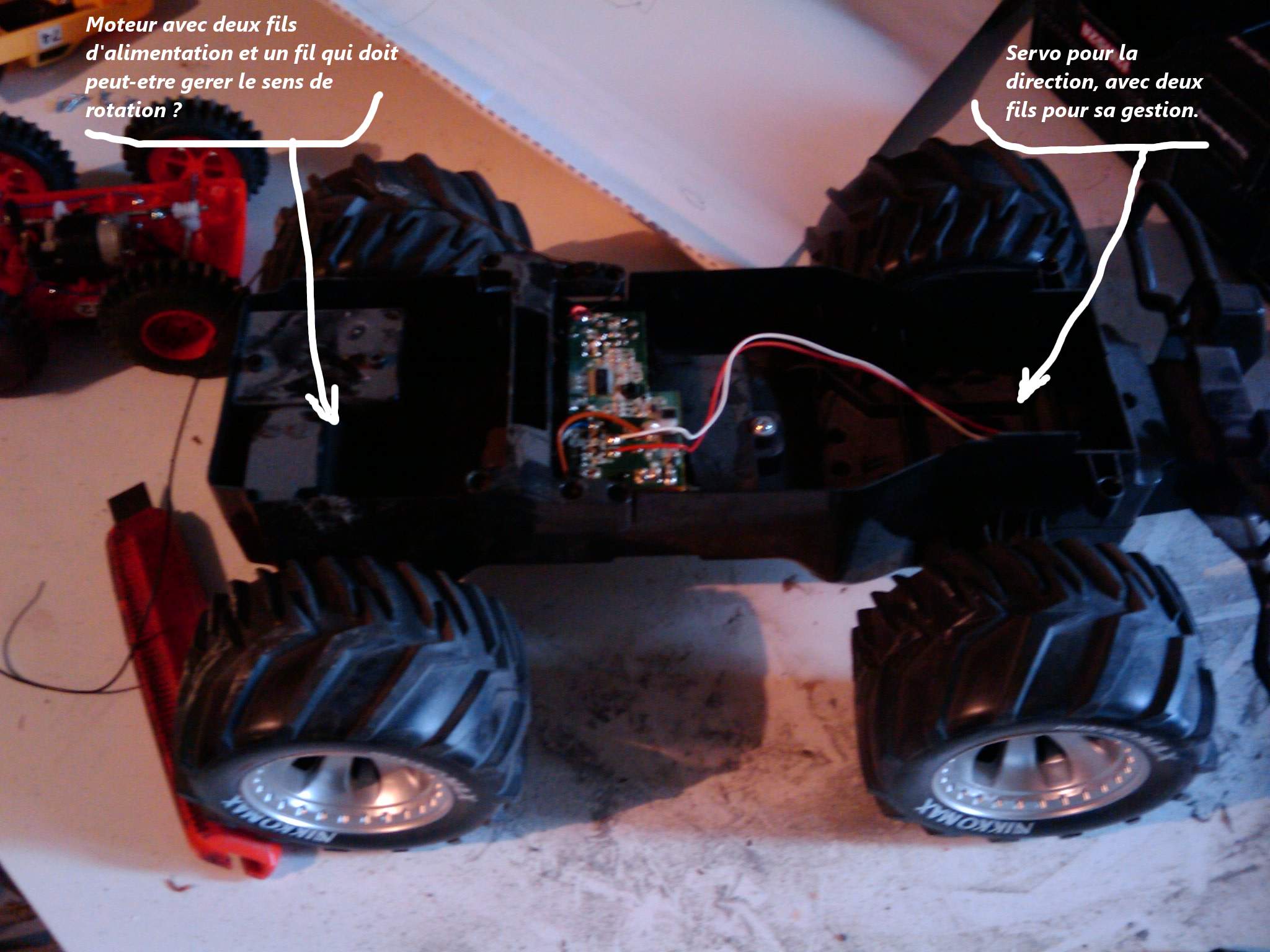 qui fonctionnait avec une batterie 6V et 650 mAh et une carte avec liaison radiocommande) + récupération d'un aspirateur à main (l'aspi de l'ergorapido : voir ici, la partie à droite en bas) + un kit arduino uno (pour gerer les mouvements de l'ex voiture ; je vais m'inspirer du programme de roby) + 4 piles 1,5V et une pile de 9V (pour alimenter respectivement les organes de direction/motorisation qui étaient sous 6V et le kit arduino) + 2 capteurs de distances infrarouge (SHARP) (ou peut-etre un capteur ultrason MaxSonar EZ1) + des fils electriques...
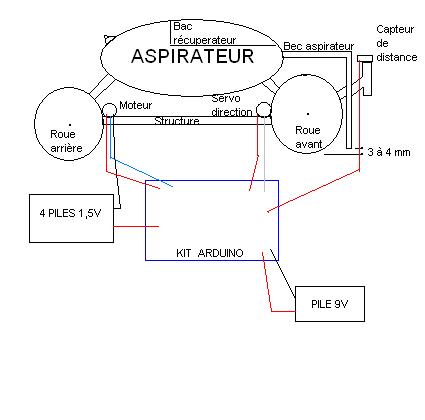
qui fonctionnait avec une batterie 6V et 650 mAh et une carte avec liaison radiocommande) + récupération d'un aspirateur à main (l'aspi de l'ergorapido : voir ici, la partie à droite en bas) + un kit arduino uno (pour gerer les mouvements de l'ex voiture ; je vais m'inspirer du programme de roby) + 4 piles 1,5V et une pile de 9V (pour alimenter respectivement les organes de direction/motorisation qui étaient sous 6V et le kit arduino) + 2 capteurs de distances infrarouge (SHARP) (ou peut-etre un capteur ultrason MaxSonar EZ1) + des fils electriques...Aménagement : l'aspi sera posé/fixé au dessus de la structure de la voiture, et un bec en plastique en avant/continuité de l'aspi viendra jusqu'à l'avant de la voiture (en dessous du parechoc et devant les roues) à ~ 3 ou 4 mm du sol.
voir le schéma fonctionnel d'ébauche (le coté électrique n'est pas encore reflechis, j'y viendrai plus tard, car j'y comprend pas grand chose pour le moment ; il manque d'ailleurs de savoir les caractéristiques du moteur et du servo integré, que je ne réussis pas à trouver dans les docs de nikko, et si c'est gérable par arduino, mais je vais tenter avec, etc) :
bon, voilà, j'en dirai plus sur l'avancement dés que j'aurai pu récuperer un Arduino.
PS: apparemment je ne suis pas le seul à utiliser les anciennes structures de voitures radiocommandées : http://letsmakerobots.com/node/23660 avec un petit plus pratique qui est l'aspirateur à bec...


















{kind=link}