

Oui en effet il y a un axe qui risque de pas servir à grand chose ^^
Mais c'est ça les modules, le sur mesure est plus cher...
En voyant le prix de l'accéléromètre ça me fait penser à un truc: tu as quel budget pour ton Magellan?
Bonne chance pour les évaluations demain! (je suis passé par là il y a une semaine :) )

160 réponses à ce sujet
#42

Esprit
-
- Membres
-

- 1â¯503 messages
Membre chevronné
- Gender:Male
- Location:Belgique
- Interests:La robotique !
Posté 21 janvier 2011 - 01:12
Bah, il servira si je suis sur un plan incliné, on sait jamais que j'en fasse un tout-terrain ! :D
Au niveau budget... Pas énorme. (En gros, j'ai 50 semaine à gérer entre la bouffe et le reste, ce que j'arrive à mettre de côté part dans le robot...)
Mais en même temps, pour une fois je n'ai pas envie de viser du low cost tout le temps, j'ai envie d'un truc qui marche correctement cette fois. J'aime bien la récupération mais quand tu veux faire les choses sérieusement ça marche quand même un peu moins bien.
Et donc au nouveau budget j'ai pas vraiment de limite, faut juste que j'ai le temps pour économiser. (Je vais essayer de voir avec les parents, l'école*, ... j'ai mon anniversaire qui arrive aussi tout doucement...)
Ça va le faire ! :D
*Oui, l'école. J'aimerais faire passer le projet comme étant en partie un projet scolaire pour voir s'ils interviendraient un petit peu... Et ça me permettrait en même temps de pouvoir travailler sur le robot à l'école et pour l'école (ce qui évite que je me disperse dans plein de choses..)
Au niveau budget... Pas énorme. (En gros, j'ai 50 semaine à gérer entre la bouffe et le reste, ce que j'arrive à mettre de côté part dans le robot...)
Mais en même temps, pour une fois je n'ai pas envie de viser du low cost tout le temps, j'ai envie d'un truc qui marche correctement cette fois. J'aime bien la récupération mais quand tu veux faire les choses sérieusement ça marche quand même un peu moins bien.
Et donc au nouveau budget j'ai pas vraiment de limite, faut juste que j'ai le temps pour économiser. (Je vais essayer de voir avec les parents, l'école*, ... j'ai mon anniversaire qui arrive aussi tout doucement...)
Ça va le faire ! :D
*Oui, l'école. J'aimerais faire passer le projet comme étant en partie un projet scolaire pour voir s'ils interviendraient un petit peu... Et ça me permettrait en même temps de pouvoir travailler sur le robot à l'école et pour l'école (ce qui évite que je me disperse dans plein de choses..)
#43
Esprit
-
- Membres
-
- 1â¯503 messages
Membre chevronné
- Gender:Male
- Location:Belgique
- Interests:La robotique !
Posté 25 janvier 2011 - 09:20
Argh ! J'ai failli me faire avoir ! :D
Le dernier lien que j'ai donné pour l'IMU, c'était pas exactement la même choses.
Il y avait bien les 3 axes de l'accéléromètre, mais ce n'était pas 3 axes de gyroscopes avec... C'était trois axes de vitesses gyroscopique !
Si j'ai bien compris la différence, un axe gyroscopique est censé me donner l'angle par rapport à l'horizontale (ou tout autre axe) et un axe de vitesse gyroscopique va me donner la vitesse à laquelle je tourne autour de ce même axe... J'ai enfin cerné les 3 types de mesures possibles avec une IMU ! :D Pas trop tôt...
Bon, du coup, je recommence où j'en étais dans mes recherches.
Le dernier lien que j'ai donné pour l'IMU, c'était pas exactement la même choses.
Il y avait bien les 3 axes de l'accéléromètre, mais ce n'était pas 3 axes de gyroscopes avec... C'était trois axes de vitesses gyroscopique !
Si j'ai bien compris la différence, un axe gyroscopique est censé me donner l'angle par rapport à l'horizontale (ou tout autre axe) et un axe de vitesse gyroscopique va me donner la vitesse à laquelle je tourne autour de ce même axe... J'ai enfin cerné les 3 types de mesures possibles avec une IMU ! :D Pas trop tôt...
Bon, du coup, je recommence où j'en étais dans mes recherches.
#44
Jbot
-

- Membres
-
- 801 messages
Membre passionné
- Gender:Male
- Location:Paris
- Interests:Robotics
Posté 25 janvier 2011 - 10:11
[quote"Esprit"]
Il y avait bien les 3 axes de l'accéléromètre, mais ce n'était pas 3 axes de gyroscopes avec... C'était trois axes de vitesses gyroscopique !
[/quote]
Euhh... Un gyroscope donne toujours la vitesse angulaire il me semble. C'est le magnétometre qui va te donner une position angulaire plutot (Je ne suis pas sur de ce que j'avance mais c'est ce qu'il me semblait :p).
Il y avait bien les 3 axes de l'accéléromètre, mais ce n'était pas 3 axes de gyroscopes avec... C'était trois axes de vitesses gyroscopique !
[/quote]
Euhh... Un gyroscope donne toujours la vitesse angulaire il me semble. C'est le magnétometre qui va te donner une position angulaire plutot (Je ne suis pas sur de ce que j'avance mais c'est ce qu'il me semblait :p).
#45
Esprit
-
- Membres
-
- 1â¯503 messages
Membre chevronné
- Gender:Male
- Location:Belgique
- Interests:La robotique !
Posté 26 janvier 2011 - 09:50
Olàlàlàlààà... Je suis perdu. :D
Récapitulons depuis le bédut... euh début.
Pour connaitre la position d'un robot dans l'espace (inclinaison, accélération, vitesse, ...) on peut utiliser une IMU (Inertial Measurement Unit). Dans une IMU qui peut aller de 1 axes à 9 axes (DOF en anglais), on trouve:
-1- Un accéléromètre.(=accelerometer)
-2- Un gyroscope. (=magnetometer)
-3- Un gyromètre. (=gyroscope)
Donc, si je reprends mes besoins... J'ai envie de connaitre les accélérations du robot, pour déterminer ensuite sa vitesse et sa position.
Il est impératif que je connaisse sans position angulaire si je veux le maintenir correctement en équilibre.
Il me faut donc : Un accéléromètre (3axes) et un gyroscope (2 ou 3 axes)!
Je cherche une IMU qui combine les deux. J'en trouve une série combinant un accéléromètre ADXL335 et un gyro.
Pour l'ADXL335, il est mis qu'il mesure les accélération à partir de +-3g. Ce qui veut dire qu'il faut une accélération de près de 29,4m/s² pour qu'il remarque que ça bouge ? Est-ce assez précis ? (J'ai du mal à visualiser ce que ça fait...)
Pffiuuu, et moi qui croyait avoir trouvé. :p
Attention : Gyroscope != Gyromètre !
Et tant que j'y suis, Magnétomètre : Un magnétomètre est un appareil qui sert à mesurer l'aimantation d'un système. Il en existe différents types, basés sur des principes physiques différents...
[Edit : J'ai changé mes traduction...
Ce qui donne la position angulaire, en français c'est un gyroscope et en anglais c'est un "magnetometer".
Et ce qui donne la vitesse angulaire ("angular velocity"), en français c'est un gyromètre et en anglais un "gyroscope".
Merci les faux amis...
Récapitulons depuis le bédut... euh début.
Pour connaitre la position d'un robot dans l'espace (inclinaison, accélération, vitesse, ...) on peut utiliser une IMU (Inertial Measurement Unit). Dans une IMU qui peut aller de 1 axes à 9 axes (DOF en anglais), on trouve:
-1- Un accéléromètre.(=accelerometer)
Un accéléromètre est un capteur qui, fixé à un mobile ou tout autre objet, permet de mesurer l'accélération linéaire de ce dernier. (...) Bien que l'accélération linéaire soit définie en m/s2 (SI), la majorité des documentations sur ces capteurs expriment l'accélération en « g »...
-2- Un gyroscope. (=magnetometer)
Le gyroscope donne la position angulaire (selon un, deux ou les trois axes) de son référentiel par rapport à un référentiel inertiel (ou galiléen).
-3- Un gyromètre. (=gyroscope)
Un gyromètre est un instrument qui mesure une vitesse angulaire. Il est utilisé principalement dans les avions, les bateaux, les sous marins pour déterminer sa vitesse et sa position.
Donc, si je reprends mes besoins... J'ai envie de connaitre les accélérations du robot, pour déterminer ensuite sa vitesse et sa position.
Il est impératif que je connaisse sans position angulaire si je veux le maintenir correctement en équilibre.
Il me faut donc : Un accéléromètre (3axes) et un gyroscope (2 ou 3 axes)!
Je cherche une IMU qui combine les deux. J'en trouve une série combinant un accéléromètre ADXL335 et un gyro.
Pour l'ADXL335, il est mis qu'il mesure les accélération à partir de +-3g. Ce qui veut dire qu'il faut une accélération de près de 29,4m/s² pour qu'il remarque que ça bouge ? Est-ce assez précis ? (J'ai du mal à visualiser ce que ça fait...)
Pffiuuu, et moi qui croyait avoir trouvé. :p
Attention : Gyroscope != Gyromètre !
Dans les capteurs : un gyroscope est un capteur de position angulaire et un gyromètre un capteur de vitesse angulaire.
Et tant que j'y suis, Magnétomètre : Un magnétomètre est un appareil qui sert à mesurer l'aimantation d'un système. Il en existe différents types, basés sur des principes physiques différents...
[Edit : J'ai changé mes traduction...
Ce qui donne la position angulaire, en français c'est un gyroscope et en anglais c'est un "magnetometer".
Et ce qui donne la vitesse angulaire ("angular velocity"), en français c'est un gyromètre et en anglais un "gyroscope".
Merci les faux amis...
#46
Jbot
-
- Membres
-
- 801 messages
Membre passionné
- Gender:Male
- Location:Paris
- Interests:Robotics
Posté 26 janvier 2011 - 10:04
Pour l'ADXL335, il est mis qu'il mesure les accélération à partir de +-3g. Ce qui veut dire qu'il faut une accélération de près de 29,4m/s² pour qu'il remarque que ça bouge ? Est-ce assez précis ? (J'ai du mal à visualiser ce que ça fait...)
Tu as mal lu je pense.
Il mesure l'accélération dans une bande minimum de +-3g, et non pas a partir de 3g.
C'est a dire qu'entre -3g et +3g il arrive a mesurer sur et certain, et aprés si tu tombes sur une bonne série il arrivera peut etre a mesurer jusqu'a 3.2g par exemple.
"measures acceleration with a minimum full-scale range of ±3 g."
#47
Esprit
-
- Membres
-
- 1â¯503 messages
Membre chevronné
- Gender:Male
- Location:Belgique
- Interests:La robotique !
#49
Esprit
-
- Membres
-
- 1â¯503 messages
Membre chevronné
- Gender:Male
- Location:Belgique
- Interests:La robotique !
Posté 01 février 2011 - 11:34
Bonjour à tous !
Voilà les petites nouvelles.
Je suis toujours en recherche pour la centrale inertielle. Je dois demander à un prof ou l'autre et confirmer le tout à Paris ce week-end. Il y a beaucoup de pistes avec beaucoup de choses à vérifier... Au plus tard lundi je commande.
Par contre, pour les moteurs brushless, c'est le flou casi total. Je m'oriente vers les outrunner qui, d'après ce que j'ai lu et compris, tournent plus lentement mais possèdent plus de couple. Sans compter qu'ils ont plus de classe... :p Je reste assez surpris de l'ampérage des brushless. Il n'est pas rare de voir des 50A, 90A... Je ne sais même pas de quoi j'ai besoin exactement mais ça me semble beaucoup. Ça risque de vider mes batteries rapidement. Et en parlant de batterie, je sais que ça sera des Lipo, mais j'attends de voir quels moteurs je vais utiliser avant de faire un choix.
Il va être temps que je me pousse un peu au derrière si je veux avancer.
[Edit : Pour avoir de bonnes infos, précises, sur les IMU, il suffisait un peu de fouiller le site de Sparkfun.
Pour l'accéléromètre, selon eux le plus facile à utiliser c'est bien le ADXL335, celui que j'avais regardé. Je pense donc rester sur ce choix si personne ne me dit que je fais erreur d'ici la commande.
Par contre, là il parlent de "Gyroscopes" pour mesure la vitesse angulaire... RAH!
Je veux juste mesurer l'orientation moi! ^^
Voilà les petites nouvelles.
Je suis toujours en recherche pour la centrale inertielle. Je dois demander à un prof ou l'autre et confirmer le tout à Paris ce week-end. Il y a beaucoup de pistes avec beaucoup de choses à vérifier... Au plus tard lundi je commande.
Par contre, pour les moteurs brushless, c'est le flou casi total. Je m'oriente vers les outrunner qui, d'après ce que j'ai lu et compris, tournent plus lentement mais possèdent plus de couple. Sans compter qu'ils ont plus de classe... :p Je reste assez surpris de l'ampérage des brushless. Il n'est pas rare de voir des 50A, 90A... Je ne sais même pas de quoi j'ai besoin exactement mais ça me semble beaucoup. Ça risque de vider mes batteries rapidement. Et en parlant de batterie, je sais que ça sera des Lipo, mais j'attends de voir quels moteurs je vais utiliser avant de faire un choix.
Il va être temps que je me pousse un peu au derrière si je veux avancer.
[Edit : Pour avoir de bonnes infos, précises, sur les IMU, il suffisait un peu de fouiller le site de Sparkfun.
Pour l'accéléromètre, selon eux le plus facile à utiliser c'est bien le ADXL335, celui que j'avais regardé. Je pense donc rester sur ce choix si personne ne me dit que je fais erreur d'ici la commande.
Par contre, là il parlent de "Gyroscopes" pour mesure la vitesse angulaire... RAH!
Je veux juste mesurer l'orientation moi! ^^
#50
Esprit
-
- Membres
-
- 1â¯503 messages
Membre chevronné
- Gender:Male
- Location:Belgique
- Interests:La robotique !
Posté 02 février 2011 - 02:51
Il y a du nouveau. Je m'autorise une petite extension de budget.
J'attends confirmation mais je pense prendre finalement une centrale inertielle 9 axes.
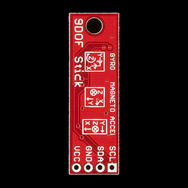
Sur cette petite centrale inertielle il y a :
Un accéléromètre 3 axes (ADXL345) (accélérations axiales)
Un gyroscope 3 axes (HMC5843) (pour avoir donc l'angle d'inclinaison par rapport à un référent)
Un gyromètre 3 axes (ITG-3200) (pour avoir la vitesse angulaire)
Le tout renvoyé en I²C vers mon arduino Mega et enjoy! ;)
Vous en pensez-quoi ? Ça vous semble bon ? (Autant être sûr et certain...)
Par contre, je vais revoir un peu ma mécanique à la baisse. Je compte plutôt faire un prototype avec juste deux "simples" moteurs à courant continu à balais. Prototype plus petit aussi. Ça permettra de bien tester le principe, on ne fait jamais les choses bien au premier jet. Je me ferai la grosse version finale un peu plus tard. ;)
J'attends confirmation mais je pense prendre finalement une centrale inertielle 9 axes.
Sur cette petite centrale inertielle il y a :
Un accéléromètre 3 axes (ADXL345) (accélérations axiales)
Un gyroscope 3 axes (HMC5843) (pour avoir donc l'angle d'inclinaison par rapport à un référent)
Un gyromètre 3 axes (ITG-3200) (pour avoir la vitesse angulaire)
Le tout renvoyé en I²C vers mon arduino Mega et enjoy! ;)
Vous en pensez-quoi ? Ça vous semble bon ? (Autant être sûr et certain...)
Par contre, je vais revoir un peu ma mécanique à la baisse. Je compte plutôt faire un prototype avec juste deux "simples" moteurs à courant continu à balais. Prototype plus petit aussi. Ça permettra de bien tester le principe, on ne fait jamais les choses bien au premier jet. Je me ferai la grosse version finale un peu plus tard. ;)
#51
Jbot
-
- Membres
-
- 801 messages
Membre passionné
- Gender:Male
- Location:Paris
- Interests:Robotics
Posté 02 février 2011 - 04:09
Heu le HMC c'est un magnétometre hein :p
Ca m'a l'air pas mal, moi j'aurais plutot pris ca http://www.sparkfun.com/products/9623 mais c'est un peu plus cher du coup ^^
Cette carte est plus connu je pense et a plus de support (et possede un microcontrolleur intégré qui peut te faire les filtres, il y a des projets de fait la dessus)
Tiens aucun rapport mais je viens de découvrir ces moteurs http://www.robotshop.com/eu/rbban31-moteur-planetaire-banebots.html?lang=fr-ca
Ils ont l'air pas mal du tout et ont un couple énorme ! Ca peut peut-etre faire l'affaire a la place de tes brushless non ?
Ca m'a l'air pas mal, moi j'aurais plutot pris ca http://www.sparkfun.com/products/9623 mais c'est un peu plus cher du coup ^^
Cette carte est plus connu je pense et a plus de support (et possede un microcontrolleur intégré qui peut te faire les filtres, il y a des projets de fait la dessus)
Tiens aucun rapport mais je viens de découvrir ces moteurs http://www.robotshop.com/eu/rbban31-moteur-planetaire-banebots.html?lang=fr-ca
Ils ont l'air pas mal du tout et ont un couple énorme ! Ca peut peut-etre faire l'affaire a la place de tes brushless non ?
#52
Esprit
-
- Membres
-
- 1â¯503 messages
Membre chevronné
- Gender:Male
- Location:Belgique
- Interests:La robotique !
Posté 03 février 2011 - 11:10
[quote"Jbot"]Heu le HMC c'est un magnétometre hein :p[/quote]
Wikipédia me dit : "Dans les capteurs : un gyroscope est un capteur de position angulaire et un gyromètre un capteur de vitesse angulaire."
Du coup, j'ai tendance à penser que c'est un gyroscope, bien qu'en anglais il est mit "magnetometer"... Mais peut-être qu'il y a une erreur sur wikipédia...
[quote"Jbot"]Ca m'a l'air pas mal, moi j'aurais plutot pris ca http://www.sparkfun.com/products/9623 mais c'est un peu plus cher du coup ^^ Cette carte est plus connu je pense et a plus de support (et possede un microcontroleur intégré qui peut te faire les filtres, il y a des projets de fait la dessus)[/quote]
Je pense que ça va être difficile d'augmenter encore le budget capteur...
Surtout que les filtres, je peux les faire sur l'arduino. Quel va être l'avantage de la carte que tu proposes ?
Faire le filtre directement dessus permet de récupérer un signal déjà traité du coup ?
Pour tes moteurs, le couple est effectivement très important. Énorme même !
Je n'ai pas besoin d'un couple aussi énorme. J'ai des simples moteurs cc qui feront l'affaire. (Parce que 40/moteur, gloups)
Après, on verra pour une prochaine version. Toujours intéressant d'avoir des pistes de recherche. ;)
Wikipédia me dit : "Dans les capteurs : un gyroscope est un capteur de position angulaire et un gyromètre un capteur de vitesse angulaire."
Du coup, j'ai tendance à penser que c'est un gyroscope, bien qu'en anglais il est mit "magnetometer"... Mais peut-être qu'il y a une erreur sur wikipédia...
[quote"Jbot"]Ca m'a l'air pas mal, moi j'aurais plutot pris ca http://www.sparkfun.com/products/9623 mais c'est un peu plus cher du coup ^^ Cette carte est plus connu je pense et a plus de support (et possede un microcontroleur intégré qui peut te faire les filtres, il y a des projets de fait la dessus)[/quote]
Je pense que ça va être difficile d'augmenter encore le budget capteur...
Surtout que les filtres, je peux les faire sur l'arduino. Quel va être l'avantage de la carte que tu proposes ?
Faire le filtre directement dessus permet de récupérer un signal déjà traité du coup ?
Pour tes moteurs, le couple est effectivement très important. Énorme même !
Je n'ai pas besoin d'un couple aussi énorme. J'ai des simples moteurs cc qui feront l'affaire. (Parce que 40/moteur, gloups)
Après, on verra pour une prochaine version. Toujours intéressant d'avoir des pistes de recherche. ;)
#53
Esprit
-
- Membres
-
- 1â¯503 messages
Membre chevronné
- Gender:Male
- Location:Belgique
- Interests:La robotique !
Posté 08 février 2011 - 10:35
Le capteur est commandé ! Et bam, 80 dans les dents ! :D
J'ai finalement choisis ce capteur, dont j'avais déjà parlé. Je ne doute pas que celui que tu me proposais était mieux Jbot mais je ne peux pas me permettre de payer plus cher que ça...

Alors, qu'est-ce qui est urgent maintenant ?
-Bosser sur la motorisation et la réduction. J'ai déjà des moteurs à courant continu classiques. (Donc du coup, je dois fixer le rapport de réduction que je veux et j'en profiterai pour faire les calculs de couples, de vitesse max, d'accélération, ce genre de petites choses amusantes. ;) )
-Choisir une batterie. Les piles ça serait simples mais ça coûte cher à l'usage et c'est pas très écolo. Du coup, on oublie et je continue de m'orienter vers du Lipo. Mes calculs pour la motorisation vont m'aider à déterminer la consommation moyenne du robot et en fonction de l'autonomie que j'aimerais avoir (J'aimerais bien ne pas avoir à le recharger toutes les 10 minutes...), je vais choisir ça.
Et dans la même idée, il me faut aussi un chargeur Lipo... Je sens que mon Paypal va encore chauffer...
-Le chassis... Bien que j'ai décidé de plutôt commencer par un prototype et donc viser au plus simple, je dois réfléchir encore pour le chassis. Je dois réfléchir à comment je fixerai les moteurs, les batteries, les cartes (contrôle moteur et arduino Mega dans un premier temps, ... etc... Il sera sans doute plus petit que les 50cm prévus au départ. (À mon avis une base circulaire de 25cm de diamètre.)
Ça avance, ça avance ! ;)
J'ai finalement choisis ce capteur, dont j'avais déjà parlé. Je ne doute pas que celui que tu me proposais était mieux Jbot mais je ne peux pas me permettre de payer plus cher que ça...
Alors, qu'est-ce qui est urgent maintenant ?
-Bosser sur la motorisation et la réduction. J'ai déjà des moteurs à courant continu classiques. (Donc du coup, je dois fixer le rapport de réduction que je veux et j'en profiterai pour faire les calculs de couples, de vitesse max, d'accélération, ce genre de petites choses amusantes. ;) )
-Choisir une batterie. Les piles ça serait simples mais ça coûte cher à l'usage et c'est pas très écolo. Du coup, on oublie et je continue de m'orienter vers du Lipo. Mes calculs pour la motorisation vont m'aider à déterminer la consommation moyenne du robot et en fonction de l'autonomie que j'aimerais avoir (J'aimerais bien ne pas avoir à le recharger toutes les 10 minutes...), je vais choisir ça.
Et dans la même idée, il me faut aussi un chargeur Lipo... Je sens que mon Paypal va encore chauffer...
-Le chassis... Bien que j'ai décidé de plutôt commencer par un prototype et donc viser au plus simple, je dois réfléchir encore pour le chassis. Je dois réfléchir à comment je fixerai les moteurs, les batteries, les cartes (contrôle moteur et arduino Mega dans un premier temps, ... etc... Il sera sans doute plus petit que les 50cm prévus au départ. (À mon avis une base circulaire de 25cm de diamètre.)
Ça avance, ça avance ! ;)
#54
Jbot
-
- Membres
-
- 801 messages
Membre passionné
- Gender:Male
- Location:Paris
- Interests:Robotics
Posté 08 février 2011 - 01:25
Tu connais deja surement mais pour tout ce qui est batterie et compagnie, je te conseil : http://www.hobbycity.com/hobbyking/store/uh_index.asp

#57
Esprit
-
- Membres
-
- 1â¯503 messages
Membre chevronné
- Gender:Male
- Location:Belgique
- Interests:La robotique !
Posté 09 février 2011 - 06:36
Je sais pas s'il y a vraiment un comparatif à faire... Il faut tester ses moteurs et voir combien ils consomment et donc pouvoir faire une approximation de la consommation et de la tension qu'on a besoin. Après ça dépend de l'autonomie qu'on veut... ;)
Je vais prendre un de mes moteurs à l'école aujourd'hui pour le tester sur l'alim de labo et voir combien il bouffe de mA, ça me donnera déjà une bonne idée.
[Edit: De plus, il exercice déjà quelques comparatifs bien foutus. Je ne pourrai pas faire mieux... Sauf si tu me paies plein de batteries pour que je les essayes. :D
bungymania
forum d'airsoft
Ils utilisent aussi des batteries dans leurs fusils. Les risques sont bien expliqués, pareil pour le matériel de protection (qui coupe le circuit si la tension de la batterie descend sous 3V, qui buzze, ...) de l'intérêt d'avoir un vrai chargeur, etc... Très intéressant.
Ils parlent aussi des Lipo Sack (des sacs de protections qui évitent de bruler ta maison en cas de problème).
rcpilot, sur les courbes de décharge. Intéressant aussi.
Bref, il y a plein de lien, je n'ai pas le courage de tout recommencer. ;)
Par contre, j'expliquerai les critères qui m'ont fait choisir, ça oui.
[Edit2: J'ai fais les calculs pour les moteurs, en me basant sur le tutoriel de Glius, que je remercie. ;)
Données :
m = masse du robot => 3kg (j'ai compté ça pour le proto, un peu au pif j'avoue, je voulais surtout me donner une idée...)
v(t) = vitesse à un instant t => 3km/h ≃ 0,8m/s
v(0) = vitesse de départ => Om/s
d = distance (m) => 2m (distance pour le robot entre v(0) et v(t), si j'ai bien compris ?)
g = constante gravitationnelle => 9,81m/s² ≃ 10m/s
r = diamètre roue (m) => 0,05m
α = angle de la pente => 0°
Formules :
F = m/2 . d . (v(t)^{2}-v(0)^{2})
C_{m}= F . r (Dans ce cas, "r" est le rayon et non pas le diamètre de la roue, comme dans les données)
P_{moteur} = F . v(t)
a= F/m
Calculs :
F = m/2 . d . (v(t)^{2}-v(0)^{2}) = 3/2 . 2 . ((0,8)^{2}-(0)^{2}) = 3 . (0,8)^{2} = 1,92 N
C_{m} = F . r = 1,92 . 0,025 = 0,048 N.m
P = F . v(t) = 1,92 . 0,8 = 1,536 W
a = F/m = 1,92/3 = 0,64 m/s^{2}
Je vais tester les moteurs au prochain cours (oui oui, je suis en cours là...).
Je pourrai voir le courant qu'ils demandent, leur vitesse (s'il y a un tachymètre, pas sûr, ...).
La suite bientôt ! ;)
Je vais prendre un de mes moteurs à l'école aujourd'hui pour le tester sur l'alim de labo et voir combien il bouffe de mA, ça me donnera déjà une bonne idée.
[Edit: De plus, il exercice déjà quelques comparatifs bien foutus. Je ne pourrai pas faire mieux... Sauf si tu me paies plein de batteries pour que je les essayes. :D
bungymania
forum d'airsoft
Ils utilisent aussi des batteries dans leurs fusils. Les risques sont bien expliqués, pareil pour le matériel de protection (qui coupe le circuit si la tension de la batterie descend sous 3V, qui buzze, ...) de l'intérêt d'avoir un vrai chargeur, etc... Très intéressant.
Ils parlent aussi des Lipo Sack (des sacs de protections qui évitent de bruler ta maison en cas de problème).
rcpilot, sur les courbes de décharge. Intéressant aussi.
Bref, il y a plein de lien, je n'ai pas le courage de tout recommencer. ;)
Par contre, j'expliquerai les critères qui m'ont fait choisir, ça oui.
[Edit2: J'ai fais les calculs pour les moteurs, en me basant sur le tutoriel de Glius, que je remercie. ;)
Données :
m = masse du robot => 3kg (j'ai compté ça pour le proto, un peu au pif j'avoue, je voulais surtout me donner une idée...)
v(t) = vitesse à un instant t => 3km/h ≃ 0,8m/s
v(0) = vitesse de départ => Om/s
d = distance (m) => 2m (distance pour le robot entre v(0) et v(t), si j'ai bien compris ?)
g = constante gravitationnelle => 9,81m/s² ≃ 10m/s
r = diamètre roue (m) => 0,05m
α = angle de la pente => 0°
Formules :
F = m/2 . d . (v(t)^{2}-v(0)^{2})
C_{m}= F . r (Dans ce cas, "r" est le rayon et non pas le diamètre de la roue, comme dans les données)
P_{moteur} = F . v(t)
a= F/m
Calculs :
F = m/2 . d . (v(t)^{2}-v(0)^{2}) = 3/2 . 2 . ((0,8)^{2}-(0)^{2}) = 3 . (0,8)^{2} = 1,92 N
C_{m} = F . r = 1,92 . 0,025 = 0,048 N.m
P = F . v(t) = 1,92 . 0,8 = 1,536 W
a = F/m = 1,92/3 = 0,64 m/s^{2}
Je vais tester les moteurs au prochain cours (oui oui, je suis en cours là...).
Je pourrai voir le courant qu'ils demandent, leur vitesse (s'il y a un tachymètre, pas sûr, ...).
La suite bientôt ! ;)
#58
Esprit
-
- Membres
-
- 1â¯503 messages
Membre chevronné
- Gender:Male
- Location:Belgique
- Interests:La robotique !
Posté 16 février 2011 - 01:20
Bonjour à tous !
J'ai fais le schéma pour les contrôle de moteurs avec le L298N sur Fritzing.
Je sais que certains n'aiment pas Fritzing, je vais faire un schéma plus conventionnel bientôt. ;)
Petite précision : Le bornier du haut, c'est l'alimentation des moteurs (19V) et celui en bas c'est l'alimentation logique (5V).
J'ai cependant deux questions.
À quoi servent les broches 1 et 15 du L298N (current sensing A et current sensing B) ? Je les ai mis à la masse.
Si je ne me trompe pas ils servent quand on veut interfacer plusieurs composants...
Autre chose, est-ce que je peux commander directement le moteur via les "INPUT1" et "INPUT2" en PWM ? Ma prof m'a parlé de mettre un condensateur quelque part pour obtenir la valeur moyenne pour commander le moteur... ?
Sinon, j'attends toujours mon capteur et ma base en plexi... Je dois aussi toujours travailler à la réduction pour les moteurs.
Bref, encore beaucoup de boulot ! ;)
J'ai fais le schéma pour les contrôle de moteurs avec le L298N sur Fritzing.
Je sais que certains n'aiment pas Fritzing, je vais faire un schéma plus conventionnel bientôt. ;)
Petite précision : Le bornier du haut, c'est l'alimentation des moteurs (19V) et celui en bas c'est l'alimentation logique (5V).
J'ai cependant deux questions.
À quoi servent les broches 1 et 15 du L298N (current sensing A et current sensing B) ? Je les ai mis à la masse.
Si je ne me trompe pas ils servent quand on veut interfacer plusieurs composants...
Autre chose, est-ce que je peux commander directement le moteur via les "INPUT1" et "INPUT2" en PWM ? Ma prof m'a parlé de mettre un condensateur quelque part pour obtenir la valeur moyenne pour commander le moteur... ?
Sinon, j'attends toujours mon capteur et ma base en plexi... Je dois aussi toujours travailler à la réduction pour les moteurs.
Bref, encore beaucoup de boulot ! ;)
#60
Esprit
-
- Membres
-
- 1â¯503 messages
Membre chevronné
- Gender:Male
- Location:Belgique
- Interests:La robotique !
Posté 19 février 2011 - 02:35
Mon capteur est arrivé ! (Enfin, chez mes parents, je le récupère demain...)
Mon frère m'a aussi fait 3 cercles de plexi de 25cm de diamètre et 4mm d'épaisseur.
J'ai choisis les moteurs...
J'ai aussi reçu une série de LED bleues pour la déco du robot. C'est des 15 000 mcd, ça flashe! ;)
Bon, que reste-il ?
-Choisir une batterie.
-Choisir la taille des roues.
-Travailler sur la réduction pour avoir un rapport vitesse/couple intéressant.
-Programmer... :p
Et j'ai enfin la deadline. Le projet doit être fonctionnel pour le 30 mars (porte ouverte de l'école, ils aiment bien se faire mousser sur notre travail... :D ) Donc, une version basique doit être finie pour ce moment là.
[Edit : Et en parlant de batterie...
Vaut-il mieux prévoir une seule "grosse" batterie (comme ça) pour alimenter les moteurs (Tension nominale : 19V) et l'arduino (donc diminuer la tension à 9V) ou bien vaut-il mieux prévoir deux batteries séparées?
Mon frère m'a aussi fait 3 cercles de plexi de 25cm de diamètre et 4mm d'épaisseur.
J'ai choisis les moteurs...
J'ai aussi reçu une série de LED bleues pour la déco du robot. C'est des 15 000 mcd, ça flashe! ;)
Bon, que reste-il ?
-Choisir une batterie.
-Choisir la taille des roues.
-Travailler sur la réduction pour avoir un rapport vitesse/couple intéressant.
-Programmer... :p
Et j'ai enfin la deadline. Le projet doit être fonctionnel pour le 30 mars (porte ouverte de l'école, ils aiment bien se faire mousser sur notre travail... :D ) Donc, une version basique doit être finie pour ce moment là.
[Edit : Et en parlant de batterie...
Vaut-il mieux prévoir une seule "grosse" batterie (comme ça) pour alimenter les moteurs (Tension nominale : 19V) et l'arduino (donc diminuer la tension à 9V) ou bien vaut-il mieux prévoir deux batteries séparées?
Répondre à ce sujet









0 utilisateur(s) li(sen)t ce sujet
0 members, 0 guests, 0 anonymous users




