

Transistors :
Transistor 2n2222 0.60 Euro l'un (prix dégressif selon quantité )
ou sinon la il y a le choix : ici
Résistances :
ici
Pour savoir calculer quels résistances (les valeurs des resistances) nous aurons besoin , nous devons poser une opération . Cette opération s'appelle la loi de ohms . voici la technique pour la calculer : U = R x I , U représente l'alimentation (une pile par exemple) qui est mesure en Volts , R représente la valeur de la resistance ( a trouver ) qui est mesure en Ohms , et I représente la tension qui est mesure en Ampères.
Pour trouver la tension on fait : I = U/R
Pour trouver la resistance on fait : R = U/I
Condensateurs :
la

265 réponses à ce sujet
#22

Black Templar
-

- Membres
-

- 1â¯430 messages
Membre
- Gender:Male
- Location:Lille
Posté 22 avril 2012 - 08:05
Mon site internet : http://ferdinandpiette.com/
#23
Newbies
-
- Membres
-
- 487 messages
Habitué
- Gender:Male
- Location:Paris
- Interests:Programmation et robotique
Posté 22 avril 2012 - 08:30
Le truc que j'ai oublier de preciser c'est que j'ai dejas modeliser mon chassis ( je ne peut pas vous mettre des photo pour l'instant car elles sont sur le site du college qui est merdique ) et qui fait 15 cm de long 10 de large et qui est monté sur chenille. J'ai aussi commander les pieces. Pour les pieces j'ai pris tout pour faire mon chassis et mes moteurs http://www.a4.fr/moto-reducteur-rapport-151-3v-axe-d4-mm-918d1511_p3755.html qui sont cher et gros mais il n'y avait pas vraiment le choix.
Je voulais aussi preciser que je sais souder et je possede le materiel pour. Et que javais pensé au cocotix mais c'est aussi ce que toute la classe a pensé ( a la limite je me fou de gagné je veut juste faire un bon petit robot )
Pourriez vous me faire un petit recap du materiel pour votre solution analogique.
Théo.
Je voulais aussi preciser que je sais souder et je possede le materiel pour. Et que javais pensé au cocotix mais c'est aussi ce que toute la classe a pensé ( a la limite je me fou de gagné je veut juste faire un bon petit robot )
Pourriez vous me faire un petit recap du materiel pour votre solution analogique.
Théo.
#24
Mike118
-

- Administrateur
-
- 10â¯341 messages
Staff Robot Maker
- Gender:Male
- Location:Anglet
- Interests:Robotique, Entrepreneuriat, Innovation, Programmation, Résolution de problème, Recherche de solutions, Mécanique, Electronique, Créer, Concevoir
Posté 22 avril 2012 - 08:43
Le truc que j'ai oublier de preciser c'est que j'ai dejas modeliser mon chassis ( je ne peut pas vous mettre des photo pour l'instant car elles sont sur le site du college qui est merdique ) et qui fait 15 cm de long 10 de large et qui est monté sur chenille. J'ai aussi commander les pieces. Pour les pieces j'ai pris tout pour faire mon chassis et mes moteurs http://www.a4.fr/moto-reducteur-rapport-151-3v-axe-d4-mm-918d1511_p3755.html qui sont cher et gros mais il n'y avait pas vraiment le choix.
Je voulais aussi preciser que je sais souder et je possede le materiel pour. Et que javais pensé au cocotix mais c'est aussi ce que toute la classe a pensé ( a la limite je me fou de gagné je veut juste faire un bon petit robot )
Pourriez vous me faire un petit recap du materiel pour votre solution analogique.
Théo.
hum c'est toi qui va d'abord nous faire un récapitulatif :
Quelles sont toutes tes contraintes :
( cout, rapidité, dimension du châssis, poid, type de mur, type de labyrinthe, et ce que tu as déjà avec référence pour les moteurs etc... )
Met des liens des images fait des dessins ...
donc regroupe toute les info qui te permettent de faire le cahier des charges ...
Ensuite ce que tu as commandé : c'est déjà à décompter des 40 euros que tu as annoncé au départ ? si oui ce que tu as commandé t'a couté combien ?
Si mon commentaire vous a plus laissez nous un avis ! 
Nouveau sur Robot Maker ?
Jetez un oeil aux blogs, aux tutoriels, aux ouvrages, au robotscope aux articles, à la boutique et aux différents services disponible !
En attendant qu'une bibliothèque de fichiers 3D soit mise en place n'hésitez pas à demander si vous avez besoin du fichier 3D d'un des produits de la boutique... On l'a peut être !
Si vous souhaitez un robot pilotable par internet n'hésitez pas à visiter www.vigibot.com et à lire le sous forum dédié à vigibot!
#25
Newbies
-
- Membres
-
- 487 messages
Habitué
- Gender:Male
- Location:Paris
- Interests:Programmation et robotique
Posté 22 avril 2012 - 09:09
Donc voila le petit recap
J'ai dejas commander 2 fois http://www.a4.fr/moto-reducteur-rapport-151-3v-axe-d4-mm-918d1511_p3755.html = 24.26 euros
1 fois du plexi a 3.61 euro
1 fois des chenilles http://www.a4.fr/chenille-crantee-28-185_p2763.html a 1.66 euro
et un boiter de pile a 2 euro
Total = 31.53 euros mais je peut remplacer les moteurs car j'en ai chez moi mais il ne possede pas de reducteur
Joint ci dessous le plan selon mes souvenirs
J'ai dejas commander 2 fois http://www.a4.fr/moto-reducteur-rapport-151-3v-axe-d4-mm-918d1511_p3755.html = 24.26 euros
1 fois du plexi a 3.61 euro
1 fois des chenilles http://www.a4.fr/chenille-crantee-28-185_p2763.html a 1.66 euro
et un boiter de pile a 2 euro
Total = 31.53 euros mais je peut remplacer les moteurs car j'en ai chez moi mais il ne possede pas de reducteur
Joint ci dessous le plan selon mes souvenirs

#27
Mike118
-
- Administrateur
-
- 10â¯341 messages
Staff Robot Maker
- Gender:Male
- Location:Anglet
- Interests:Robotique, Entrepreneuriat, Innovation, Programmation, Résolution de problème, Recherche de solutions, Mécanique, Electronique, Créer, Concevoir
Posté 22 avril 2012 - 09:37
déjà le plan que tu as fourni montre bien qu'on peu tout simplement suivre les murs et qu'un seul capteur IR devrait suffir si le robot réagit assez vite ...
cependant tu as déjà dépensé 31.53 euros sur 40 sans avoir penser au capteur ni à la partie commande ni à l'alimentation (piles en elle même ) ... et tu n'as commandé qu'une chenille ...
et le boitié à pile c'est pour combien de piles ? 2 piles 1,5V ?
niveau économie ... c'est pas top tout ça ... par contre le moteur est cher et surdimensionné mais au moins il est utilisable.
C'est ton robot c'est ton projet moi je ne te fait que de propositions en regard de ce que tu me dis. mais là à mon avis pour continuer en gardant ce que tu as là et en respectant les 40 euros maxi, il te faut passer en mode cocotix avec des microrupteurs ...
ça serait peut être le plus simple pour toi au final.
cependant tu as déjà dépensé 31.53 euros sur 40 sans avoir penser au capteur ni à la partie commande ni à l'alimentation (piles en elle même ) ... et tu n'as commandé qu'une chenille ...
et le boitié à pile c'est pour combien de piles ? 2 piles 1,5V ?
niveau économie ... c'est pas top tout ça ... par contre le moteur est cher et surdimensionné mais au moins il est utilisable.
C'est ton robot c'est ton projet moi je ne te fait que de propositions en regard de ce que tu me dis. mais là à mon avis pour continuer en gardant ce que tu as là et en respectant les 40 euros maxi, il te faut passer en mode cocotix avec des microrupteurs ...
ça serait peut être le plus simple pour toi au final.
Si mon commentaire vous a plus laissez nous un avis !
Nouveau sur Robot Maker ?
Jetez un oeil aux blogs, aux tutoriels, aux ouvrages, au robotscope aux articles, à la boutique et aux différents services disponible !
En attendant qu'une bibliothèque de fichiers 3D soit mise en place n'hésitez pas à demander si vous avez besoin du fichier 3D d'un des produits de la boutique... On l'a peut être !
Si vous souhaitez un robot pilotable par internet n'hésitez pas à visiter www.vigibot.com et à lire le sous forum dédié à vigibot!
#28
swolf
-

- Membres
-
- 626 messages
Membre passionné
- Gender:Male
Posté 22 avril 2012 - 10:05
J'ai une question à propos des suiveurs de ligne en général:si le suiveur de ligne ne comporte, comme tu l'avais dit, qu'un seul capteur. Disons que ce capteur est dirigé vers la droite du robot:La commande "dit" au moteur de tourner à droite lorsque le capteur renvoi une distance supérieure à celle définie par l'utilisateur.
On a donc le parcours suivant: en orange la situation problématique
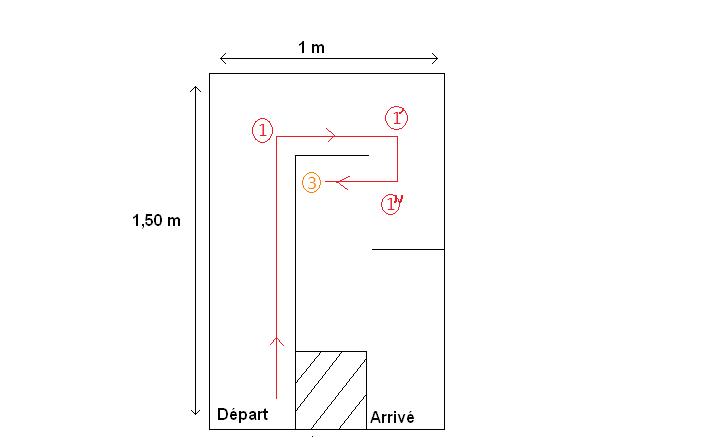
Tout d'abord le robot part en se plaçant à une distance (disons 10cm) du mur.tant qu'il est à cette distance, il avance tout droit.Ensuite il arrive au premier tournant (situation 1): les 10cm définis sont dépassés donc le robot tourne à droite, jusqu'à ce que cette distance soit de nouveau respectée. Ensuite il continue tout droit jusqu'à la situation 1': même chose que pour 1, il tourne à droite. Il détecte ensuite, si le capteur est assez précis l'arrête du mur. Il avance un poil plus loin et se retrouve au delà des 10 cm donc il re-tourne à droite (situation 1'') enfin il avance tout droit mais étant donné que son capteur se trouve à droite, il ne détecte pas le tournant et se prend le mur . Conclusion: il a besoin d'au moins un deuxième capteur dirigé vers l'avant avec l'instruction de tourner à gauche si la distance est inferieure à un seuil (définit en fonction de la largeur des couloirs) Je me trompe?
. Conclusion: il a besoin d'au moins un deuxième capteur dirigé vers l'avant avec l'instruction de tourner à gauche si la distance est inferieure à un seuil (définit en fonction de la largeur des couloirs) Je me trompe?
On a donc le parcours suivant: en orange la situation problématique
Tout d'abord le robot part en se plaçant à une distance (disons 10cm) du mur.tant qu'il est à cette distance, il avance tout droit.Ensuite il arrive au premier tournant (situation 1): les 10cm définis sont dépassés donc le robot tourne à droite, jusqu'à ce que cette distance soit de nouveau respectée. Ensuite il continue tout droit jusqu'à la situation 1': même chose que pour 1, il tourne à droite. Il détecte ensuite, si le capteur est assez précis l'arrête du mur. Il avance un poil plus loin et se retrouve au delà des 10 cm donc il re-tourne à droite (situation 1'') enfin il avance tout droit mais étant donné que son capteur se trouve à droite, il ne détecte pas le tournant et se prend le mur
. Conclusion: il a besoin d'au moins un deuxième capteur dirigé vers l'avant avec l'instruction de tourner à gauche si la distance est inferieure à un seuil (définit en fonction de la largeur des couloirs) Je me trompe?
Notre blog, à FJprod et moi: http://2froblog.wordpress.com/
#29
Newbies
-
- Membres
-
- 487 messages
Habitué
- Gender:Male
- Location:Paris
- Interests:Programmation et robotique
Posté 22 avril 2012 - 10:39
Je pense pouvoir gratter sur les 40 euros et atteindre les 45 50 ce qui laisse un budjet de environ 20 euro du coup la solution de mike118 pourrait convenir. Mais je ne comprend pas trop ce systeme quelqu un pourrait il m'expliquer un peut plus cette solution 
#30
Mike118
-
- Administrateur
-
- 10â¯341 messages
Staff Robot Maker
- Gender:Male
- Location:Anglet
- Interests:Robotique, Entrepreneuriat, Innovation, Programmation, Résolution de problème, Recherche de solutions, Mécanique, Electronique, Créer, Concevoir
Posté 23 avril 2012 - 12:20
J'ai une question à propos des suiveurs de ligne en général:si le suiveur de ligne ne comporte, comme tu l'avais dit, qu'un seul capteur. Disons que ce capteur est dirigé vers la droite du robot:La commande "dit" au moteur de tourner à droite lorsque le capteur renvoi une distance supérieure à celle définie par l'utilisateur.
On a donc le parcours suivant: en orange la situation problématique
Tout d'abord le robot part en se plaçant à une distance (disons 10cm) du mur.tant qu'il est à cette distance, il avance tout droit.Ensuite il arrive au premier tournant (situation 1): les 10cm définis sont dépassés donc le robot tourne à droite, jusqu'à ce que cette distance soit de nouveau respectée. Ensuite il continue tout droit jusqu'à la situation 1': même chose que pour 1, il tourne à droite. Il détecte ensuite, si le capteur est assez précis l'arrête du mur. Il avance un poil plus loin et se retrouve au delà des 10 cm donc il re-tourne à droite (situation 1'') enfin il avance tout droit mais étant donné que son capteur se trouve à droite, il ne détecte pas le tournant et se prend le mur
Non tu ne te trompe pas
 c'est juste qu'il ne faut pas mettre le capteur à droite ni a gauche d'ailleurs ni devant mais à 45° soit vers la droite soit vers la gauche, de manière à pouvoir capter aussi bien un mur devant qu'un mur sur le coté il ne reste plus qu'à tourner du bon coté si on est trop près !
c'est juste qu'il ne faut pas mettre le capteur à droite ni a gauche d'ailleurs ni devant mais à 45° soit vers la droite soit vers la gauche, de manière à pouvoir capter aussi bien un mur devant qu'un mur sur le coté il ne reste plus qu'à tourner du bon coté si on est trop près ! Mais c'est une bonne réflexion
Si mon commentaire vous a plus laissez nous un avis !
Nouveau sur Robot Maker ?
Jetez un oeil aux blogs, aux tutoriels, aux ouvrages, au robotscope aux articles, à la boutique et aux différents services disponible !
En attendant qu'une bibliothèque de fichiers 3D soit mise en place n'hésitez pas à demander si vous avez besoin du fichier 3D d'un des produits de la boutique... On l'a peut être !
Si vous souhaitez un robot pilotable par internet n'hésitez pas à visiter www.vigibot.com et à lire le sous forum dédié à vigibot!
#31
swolf
-
- Membres
-
- 626 messages
Membre passionné
- Gender:Male
Posté 23 avril 2012 - 12:23
Ah ok pas bête, j'avoue que je n'y avais pas pensé 
Notre blog, à FJprod et moi: http://2froblog.wordpress.com/
#32
Mike118
-
- Administrateur
-
- 10â¯341 messages
Staff Robot Maker
- Gender:Male
- Location:Anglet
- Interests:Robotique, Entrepreneuriat, Innovation, Programmation, Résolution de problème, Recherche de solutions, Mécanique, Electronique, Créer, Concevoir
Posté 23 avril 2012 - 12:25
si tu pouvais refaire ton joli schémas avec le capteur orienté à 45° et la trajectoire qui va avec ça serait très sympas et puis je pense que ça aidrait notre amis
et puis je pense que ça aidrait notre amis
Si mon commentaire vous a plus laissez nous un avis !
Nouveau sur Robot Maker ?
Jetez un oeil aux blogs, aux tutoriels, aux ouvrages, au robotscope aux articles, à la boutique et aux différents services disponible !
En attendant qu'une bibliothèque de fichiers 3D soit mise en place n'hésitez pas à demander si vous avez besoin du fichier 3D d'un des produits de la boutique... On l'a peut être !
Si vous souhaitez un robot pilotable par internet n'hésitez pas à visiter www.vigibot.com et à lire le sous forum dédié à vigibot!
#33
swolf
-
- Membres
-
- 626 messages
Membre passionné
- Gender:Male
Posté 23 avril 2012 - 12:35
Pas de problème! Si j'ai bien compris ça donne ça: (en rose le beam US/IR)
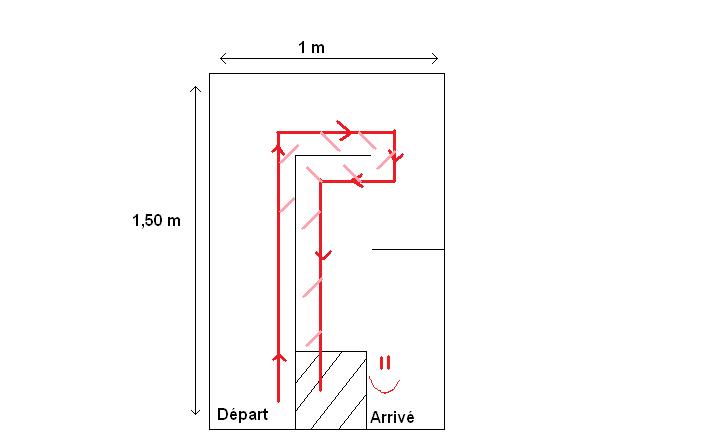
Par contre je viens de me rendre compte que le robot n'a aucun moyen de détecter larrivée: il va tourner indéfiniment... Il faudrait lui rajouter un optocoupleur à condition que l'arrivée soit symbolisée par un ligne
Par contre je viens de me rendre compte que le robot n'a aucun moyen de détecter larrivée: il va tourner indéfiniment... Il faudrait lui rajouter un optocoupleur à condition que l'arrivée soit symbolisée par un ligne
Notre blog, à FJprod et moi: http://2froblog.wordpress.com/
#34
Mike118
-
- Administrateur
-
- 10â¯341 messages
Staff Robot Maker
- Gender:Male
- Location:Anglet
- Interests:Robotique, Entrepreneuriat, Innovation, Programmation, Résolution de problème, Recherche de solutions, Mécanique, Electronique, Créer, Concevoir
Posté 23 avril 2012 - 01:13
Pas de problème! Si j'ai bien compris ça donne ça: (en rose le beam US/IR)
Par contre je viens de me rendre compte que le robot n'a aucun moyen de détecter larrivée: il va tourner indéfiniment... Il faudrait lui rajouter un optocoupleur à condition que l'arrivée soit symbolisée par un ligne
merci pour le schémas
c'est vrai que j'ai pas pensé à l'arrêt du robot ... le mien ne s'arrétait pas justement ^^ du moins pas tant qu'on appuyait pas sur l'intérrupteur ^^ il faut demander à newbies si c'est dans le cahier des charge ! si oui j'ai une petite idée purement mécanique un peu beaucoup bourrin mais low cost et plutôt ( relativement facile à mettre en oeuvre : tu te la joue à la Thésée avec le fil d'or d'Ariane dans son labyrinthe sauf que tu le fait exprès trop cour de façon à ce que ça te coupe l'alimentation quand tu arrive ^^ par contre je serais curieux d'entendre vos propositions pour l'arret si jamais celle ci s'avère nécessaire ( ça c'est à toi de nous le dire newbies;) ( moi je cogite encore je pense que je peux proposer mieux ^^)
Si mon commentaire vous a plus laissez nous un avis !
Nouveau sur Robot Maker ?
Jetez un oeil aux blogs, aux tutoriels, aux ouvrages, au robotscope aux articles, à la boutique et aux différents services disponible !
En attendant qu'une bibliothèque de fichiers 3D soit mise en place n'hésitez pas à demander si vous avez besoin du fichier 3D d'un des produits de la boutique... On l'a peut être !
Si vous souhaitez un robot pilotable par internet n'hésitez pas à visiter www.vigibot.com et à lire le sous forum dédié à vigibot!
#35
swolf
-
- Membres
-
- 626 messages
Membre passionné
- Gender:Male
Posté 23 avril 2012 - 01:21
merci pour le schémas
oulah, un peu hard le fil d'Ariane

c'est vrai que la solution de l'optocoupleur est assez compliquée, il y en a d'autre mais il faudrait connaitre les contraintes du labyrinthe: si on peut le modifier, y rajouter des trucs etc.
Notre blog, à FJprod et moi: http://2froblog.wordpress.com/
#36
Mike118
-
- Administrateur
-
- 10â¯341 messages
Staff Robot Maker
- Gender:Male
- Location:Anglet
- Interests:Robotique, Entrepreneuriat, Innovation, Programmation, Résolution de problème, Recherche de solutions, Mécanique, Electronique, Créer, Concevoir
Posté 23 avril 2012 - 01:48
oulah, un peu hard le fil d'Ariane
c'est vrai que la solution de l'optocoupleur est assez compliquée, il y en a d'autre mais il faudrait connaitre les contraintes du labyrinthe: si on peut le modifier, y rajouter des trucs etc.
pas tant que ça
mais en générale on l'utilise dans l'autre sens : on tire sur le fil pour démarrer le robot dans pas mal de compétitions robotique ^^ et puis faut quoi ? prévoir un fil d'environ 2m50 et on peut tirer nous même dessus s'il le faut pour l'arreter^^
Si mon commentaire vous a plus laissez nous un avis !
Nouveau sur Robot Maker ?
Jetez un oeil aux blogs, aux tutoriels, aux ouvrages, au robotscope aux articles, à la boutique et aux différents services disponible !
En attendant qu'une bibliothèque de fichiers 3D soit mise en place n'hésitez pas à demander si vous avez besoin du fichier 3D d'un des produits de la boutique... On l'a peut être !
Si vous souhaitez un robot pilotable par internet n'hésitez pas à visiter www.vigibot.com et à lire le sous forum dédié à vigibot!
#37
Newbies
-
- Membres
-
- 487 messages
Habitué
- Gender:Male
- Location:Paris
- Interests:Programmation et robotique
Posté 23 avril 2012 - 10:10
Si il s"arrete a la fin du parcourt c'est mieux mais le mieux est l'enemie du bien alors je pense que se serat pas nessesaire.
Sinon juste comme sa je doit pouvoir trouver grace a mon prof de techno des carteur ir pas trop cher ce qui permettrait de rentré dans le budjet avec plusieurs capteur.
J'ai aussi appris que je prof a un robot qui parcourt le circuit en 9 seconde et quelque et que si on ait un meilleure temp que lui on remporte un helico RC d'une valeur de 120 euro
Sinon juste comme sa je doit pouvoir trouver grace a mon prof de techno des carteur ir pas trop cher ce qui permettrait de rentré dans le budjet avec plusieurs capteur.
J'ai aussi appris que je prof a un robot qui parcourt le circuit en 9 seconde et quelque et que si on ait un meilleure temp que lui on remporte un helico RC d'une valeur de 120 euro
#38
geek maxou
-

- Membres
-
- 663 messages
Membre passionné
- Gender:Male
- Location:Pas-de-Calais 62
- Interests:Monde UNIX, Développement Web, Jeux Vidéo & tout se qui touche à l'électronique
Posté 23 avril 2012 - 11:10
9 seconde pour parcourir un circuit comme ca il doit avoir un robot puissant et intelligent .
Questions combient mesure le circuit c'est un labyrinthe ?
Si tu aurai des photo ou bien des schema sa pourrait aider tout le monde a realiser ton robot ...
Cordialement maxime
desoler pour les faute je suis sur mon portable
Questions combient mesure le circuit c'est un labyrinthe ?
Si tu aurai des photo ou bien des schema sa pourrait aider tout le monde a realiser ton robot ...
Cordialement maxime
desoler pour les faute je suis sur mon portable
A.R.M.I
Autonomous Robotics Mechanics Intelligent
#39
Newbies
-
- Membres
-
- 487 messages
Habitué
- Gender:Male
- Location:Paris
- Interests:Programmation et robotique
#40
Black Templar
-
- Membres
-
- 1â¯430 messages
Membre
- Gender:Male
- Location:Lille
Posté 23 avril 2012 - 11:48
9 seconde pour parcourir un circuit comme ca il doit avoir un robot puissant et intelligent .
Détrompe toi ! Tu peux réaliser un robot qui résout un labyrinthe de manière totalement analogique, très simplement !
L'algo pour résoudre un labyrinthe est ultra simple !
Quand il n'y a aucun obstacle, le robot va tout droit.
S'il y a un obstacle devant, le robot tourne à gauche de 90°.
++
Black Templar
Mon site internet : http://ferdinandpiette.com/
Répondre à ce sujet









0 utilisateur(s) li(sen)t ce sujet
0 members, 0 guests, 0 anonymous users

