
Salut,
je vois que vous avance bien , mais j'ai une question mike118 , a quoi sert de dessiner cette " boite " ?
Cordialement Dylan.

265 réponses à ce sujet
#63

Mike118
-

- Administrateur
-

- 10â¯341 messages
Staff Robot Maker
- Gender:Male
- Location:Anglet
- Interests:Robotique, Entrepreneuriat, Innovation, Programmation, Résolution de problème, Recherche de solutions, Mécanique, Electronique, Créer, Concevoir
Posté 23 avril 2012 - 05:20
les deux capteurs vont faire mal ... sans oublier le cable non fourni qu'il faut acheter en plusAlors il me faut 4 AOPs
2 capteurs iR
des resistances mais de quel valeur ?
et un peut d'huile de coude
A votre avis ya t'il un site ou acheter tous sa ? Pour pas trés cher car je suis dejas au dessus des 40 euros du college ^^
sinon pour la commande :
moi je te propose un montage avec 3 comparateur simple
et 4 diodes pour faire 2 " ou "
pour les résistance ça c'est une autre paire de manche ... déjà il t'en faudra 2 de même valeur pour les " ou " mais la valeur en elle même n'est pas importante ^^
ensuite pour les autre résistances ça va dépendre des réglage et donc il va falloire faire des essais et vérifier si ça marche etc... donc si tu en avais 2 ajustable ça serait top ...
et puis tu sais ça se récupère facilement

par contre 'il te faudra aussi 2 transistors qui peuvent faire passer 3V XmA X étant à déterminer en fonction de ton moteur et qui accepterais de se faire commander passant avec du 2-3V
pour les "ou" c'est ça : http://patrick.furon.free.fr/_elecnumerique/_cours_electronum/_Boole04_Diodes.htm
Si mon commentaire vous a plus laissez nous un avis ! 
Nouveau sur Robot Maker ?
Jetez un oeil aux blogs, aux tutoriels, aux ouvrages, au robotscope aux articles, à la boutique et aux différents services disponible !
En attendant qu'une bibliothèque de fichiers 3D soit mise en place n'hésitez pas à demander si vous avez besoin du fichier 3D d'un des produits de la boutique... On l'a peut être !
Si vous souhaitez un robot pilotable par internet n'hésitez pas à visiter www.vigibot.com et à lire le sous forum dédié à vigibot!
#64
Mike118
-
- Administrateur
-
- 10â¯341 messages
Staff Robot Maker
- Gender:Male
- Location:Anglet
- Interests:Robotique, Entrepreneuriat, Innovation, Programmation, Résolution de problème, Recherche de solutions, Mécanique, Electronique, Créer, Concevoir
Posté 23 avril 2012 - 05:27
Salut,
je vois que vous avance bien , mais j'ai une question mike118 , a quoi sert de dessiner cette " boite " ?
Cordialement Dylan.
Bon je vais pas rentrer dans les détails mais ça aide à déterminer ce que tu veux faire puis comment tu vas le faire.
ça te permet d'avoir une vue structuré et simplifié du système .
bon je veux pas te convertir mais si ça t'intéresse de savoir pourquoi ou juste d'en savoir d'avantage : tu peux taper S A D T sur google ou analyse fonctionnelle descendante
et puis tien
http://fr.wikipedia.org/wiki/Analyse_fonctionnelle_descendante
Si mon commentaire vous a plus laissez nous un avis !
Nouveau sur Robot Maker ?
Jetez un oeil aux blogs, aux tutoriels, aux ouvrages, au robotscope aux articles, à la boutique et aux différents services disponible !
En attendant qu'une bibliothèque de fichiers 3D soit mise en place n'hésitez pas à demander si vous avez besoin du fichier 3D d'un des produits de la boutique... On l'a peut être !
Si vous souhaitez un robot pilotable par internet n'hésitez pas à visiter www.vigibot.com et à lire le sous forum dédié à vigibot!
#65
dydyouaki
-

- Membres
-
- 792 messages
Membre passionné
- Gender:Male
Posté 23 avril 2012 - 07:07
Voila pour le fun , je t'ai fait ton châssis avec les capteurs, les roues et les moteurs en 3D grâce a SolidWorks
* en rouge les capteur
j'espere que tu aimeras
PS: c est toujours important de voir son projet quand il sera finit avant de l'avoir commencer
* en rouge les capteur
j'espere que tu aimeras
PS: c est toujours important de voir son projet quand il sera finit avant de l'avoir commencer
Merci a tous
Cordialement Dylan.
Cordialement Dylan.
#66
swolf
-

- Membres
-
- 626 messages
Membre passionné
- Gender:Male
Posté 23 avril 2012 - 08:35
@Newbies: bah voila, tu va l'avoir ton helico à 120 ça compensera les dépenses que tu aura dû faire en plus!
@mike118: trop cool le lien! je me suis toujours demandé comment on faisait les portes logiques (en dehors des trucs à interrupteur qu'on apprend en 2nde)
@dydyouaki: sympa le modèle! Bravo
ça compensera les dépenses que tu aura dû faire en plus!@mike118: trop cool le lien! je me suis toujours demandé comment on faisait les portes logiques (en dehors des trucs à interrupteur qu'on apprend en 2nde
)@dydyouaki: sympa le modèle! Bravo
Notre blog, à FJprod et moi: http://2froblog.wordpress.com/
#67
Newbies
-
- Membres
-
- 487 messages
Habitué
- Gender:Male
- Location:Paris
- Interests:Programmation et robotique
Posté 23 avril 2012 - 09:13
Voila pour le fun , je t'ai fait ton châssis avec les capteurs, les roues et les moteurs en 3D grâce a SolidWorks
* en rouge les capteur
j'espere que tu aimeras
PS: c est toujours important de voir son projet quand il sera finit avant de l'avoir commencer
Jolie travail et merci mais je l'ai dejas faite en cour sur google sketchup
 ( Pour les photo du chassis que j'ai fait faudra attendre 2 3 jour car la je suis en vacance et je n'est qu'un ee PC qui na pas google sketchup )
( Pour les photo du chassis que j'ai fait faudra attendre 2 3 jour car la je suis en vacance et je n'est qu'un ee PC qui na pas google sketchup )
#68
Newbies
-
- Membres
-
- 487 messages
Habitué
- Gender:Male
- Location:Paris
- Interests:Programmation et robotique
Posté 23 avril 2012 - 09:16
Mais au final je ne sais toujour pas comment souder les composant entre eux j'ai chercher des shémas sur internet mais je n'est rien trouver pour controler 2 moteurs.
#69
Mike118
-
- Administrateur
-
- 10â¯341 messages
Staff Robot Maker
- Gender:Male
- Location:Anglet
- Interests:Robotique, Entrepreneuriat, Innovation, Programmation, Résolution de problème, Recherche de solutions, Mécanique, Electronique, Créer, Concevoir
Posté 23 avril 2012 - 09:52
attend un peu avant de vouloir souder ^^ c'est en allant plus vite que la musique qu'on se plante !
je te propose déjà de retrouver le schémas que j'ai imaginé pour toi : je te donne des "noms de boite " ou des modules et toi tu relie les boites entre elles de manière a avoir la carte de commande.
donc : je te propose un montage avec 3 aop de tension de saturation VCC ( va voir la dicussion sur les aop si besoin )4 diodes ( va voir le lien sur les "ou " si besoin ) 2 résistance et 2 potentiomètre ( pont diviseur )
tu as : une pin 3V , la masse , les deux tension Um1 et Um2 mesuré par tes capteurs avec : plus on est pres d'un mur plus Um augmente !
le but du jeu ou casse tête ^^ est d'avoir :
- 2 tensions variables réglable par potentiomètre Uc1 et Uc2
- d'avoir une pin A à -VCC si on est trop près du mur d'après le capteur 1 défini pour Um1=Uc1 et +Vcc si on estime qu'on est assez loin
- d'avoir une pin B à -VCC si on est trop près du mur d'après le capteur 2 défini pour Um2=Uc2 et +Vcc si on estime qu'on est assez loin
- d'avoir une pin C à +VCC si on est trop près du mur d'après le capteur 2 défini pour Um2=Uc2 et -Vcc si on estime qu'on est assez loin
- d'avoir une pin D à environ 2-3V si A est à VCC ou si B est à VCC sinon D est à 0V
- d'avoir une pin E à environ 2-3V si A est à VCC ou si C est à VCC sinon E est à 0V
bon je suppose que j'ai pas besoin d'en dire plus ...
je te propose déjà de retrouver le schémas que j'ai imaginé pour toi : je te donne des "noms de boite " ou des modules et toi tu relie les boites entre elles de manière a avoir la carte de commande.
donc : je te propose un montage avec 3 aop de tension de saturation VCC ( va voir la dicussion sur les aop si besoin
)4 diodes ( va voir le lien sur les "ou " si besoin ) 2 résistance et 2 potentiomètre ( pont diviseur )tu as : une pin 3V , la masse , les deux tension Um1 et Um2 mesuré par tes capteurs avec : plus on est pres d'un mur plus Um augmente !
le but du jeu ou casse tête ^^ est d'avoir :
- 2 tensions variables réglable par potentiomètre Uc1 et Uc2
- d'avoir une pin A à -VCC si on est trop près du mur d'après le capteur 1 défini pour Um1=Uc1 et +Vcc si on estime qu'on est assez loin
- d'avoir une pin B à -VCC si on est trop près du mur d'après le capteur 2 défini pour Um2=Uc2 et +Vcc si on estime qu'on est assez loin
- d'avoir une pin C à +VCC si on est trop près du mur d'après le capteur 2 défini pour Um2=Uc2 et -Vcc si on estime qu'on est assez loin
- d'avoir une pin D à environ 2-3V si A est à VCC ou si B est à VCC sinon D est à 0V
- d'avoir une pin E à environ 2-3V si A est à VCC ou si C est à VCC sinon E est à 0V
bon je suppose que j'ai pas besoin d'en dire plus ...
Si mon commentaire vous a plus laissez nous un avis !
Nouveau sur Robot Maker ?
Jetez un oeil aux blogs, aux tutoriels, aux ouvrages, au robotscope aux articles, à la boutique et aux différents services disponible !
En attendant qu'une bibliothèque de fichiers 3D soit mise en place n'hésitez pas à demander si vous avez besoin du fichier 3D d'un des produits de la boutique... On l'a peut être !
Si vous souhaitez un robot pilotable par internet n'hésitez pas à visiter www.vigibot.com et à lire le sous forum dédié à vigibot!

#71
swolf
-
- Membres
-
- 626 messages
Membre passionné
- Gender:Male
Posté 24 avril 2012 - 01:41
Je ne suis pas un pro de l'analogique (au contraire  ) mais pour moi:
) mais pour moi:
Les pin (A B C D) sont les sorties des aop
Les sorties A B et C ont des polarités differentes en fonction des capteurs. Ces sorties vont ensuite dans deux autres aop (A et B dans l'un et A et C dans l'autre) lesquels "mettent" leur pin de sortie (D et E) soit a 3V soit à 0V pour commander les moteurs...
Attends quand même la réponse de mike118, c'est lui le pro
(J'ai édité le message parce que j'avai dit nimp)
) mais pour moi:Les pin (A B C D) sont les sorties des aop
Les sorties A B et C ont des polarités differentes en fonction des capteurs. Ces sorties vont ensuite dans deux autres aop (A et B dans l'un et A et C dans l'autre) lesquels "mettent" leur pin de sortie (D et E) soit a 3V soit à 0V pour commander les moteurs...
Attends quand même la réponse de mike118, c'est lui le pro
(J'ai édité le message parce que j'avai dit nimp
)
Notre blog, à FJprod et moi: http://2froblog.wordpress.com/
#72
Mike118
-
- Administrateur
-
- 10â¯341 messages
Staff Robot Maker
- Gender:Male
- Location:Anglet
- Interests:Robotique, Entrepreneuriat, Innovation, Programmation, Résolution de problème, Recherche de solutions, Mécanique, Electronique, Créer, Concevoir
Posté 24 avril 2012 - 08:03
Bonjour !
c'est un transistor relié au moteur qui va allumer le moteur si le signal au niveau de l'émetteur est positif ou l'éteindre si le signal est négatif ou nul mais ça on verra après chaque chose en son temps
attention j'ai précisé qu'il n'y avais que 3 Aop dans ce montage donc seulement 3 des 5 pins cité sont des sortie d'aop ( qui peuvent ici être remplacer par des vrais comparateurs ce qui serait mieux ) va voir la discussion robotique analogique si besoin j'ai aussi dit qu'il y avait 2 "ou" tu peux aller voir ça si besoin : http://patrick.furon...le04_Diodes.htm ce qui fait bien un total de 5 sortie
par contre je ne donnerais pas la solution final à toi de trouver ( mais je pense que ça devrait pas être trop dure )
à bientôt
Je comprend a peut prés le principe de ta solution sauf ce que sont les different PIN et en quoi sa change le comportement des moteur de le VCC soit + ou -
c'est un transistor relié au moteur qui va allumer le moteur si le signal au niveau de l'émetteur est positif ou l'éteindre si le signal est négatif ou nul mais ça on verra après
chaque chose en son temps Je ne suis pas un pro de l'analogique (au contraire
Les pin (A B C D) sont les sorties des aop
Les sorties A B et C ont des polarités differentes en fonction des capteurs. Ces sorties vont ensuite dans deux autres aop (A et B dans l'un et A et C dans l'autre) lesquels "mettent" leur pin de sortie (D et E) soit a 3V soit à 0V pour commander les moteurs...
Attends quand même la réponse de mike118, c'est lui le pro
(J'ai édité le message parce que j'avai dit nimp
attention j'ai précisé qu'il n'y avais que 3 Aop dans ce montage donc seulement 3 des 5 pins cité sont des sortie d'aop ( qui peuvent ici être remplacer par des vrais comparateurs ce qui serait mieux ) va voir la discussion robotique analogique si besoin
j'ai aussi dit qu'il y avait 2 "ou" tu peux aller voir ça si besoin : http://patrick.furon...le04_Diodes.htm ce qui fait bien un total de 5 sortie par contre je ne donnerais pas la solution final à toi de trouver
( mais je pense que ça devrait pas être trop dure ) à bientôt
Si mon commentaire vous a plus laissez nous un avis !
Nouveau sur Robot Maker ?
Jetez un oeil aux blogs, aux tutoriels, aux ouvrages, au robotscope aux articles, à la boutique et aux différents services disponible !
En attendant qu'une bibliothèque de fichiers 3D soit mise en place n'hésitez pas à demander si vous avez besoin du fichier 3D d'un des produits de la boutique... On l'a peut être !
Si vous souhaitez un robot pilotable par internet n'hésitez pas à visiter www.vigibot.com et à lire le sous forum dédié à vigibot!
#74
Mike118
-
- Administrateur
-
- 10â¯341 messages
Staff Robot Maker
- Gender:Male
- Location:Anglet
- Interests:Robotique, Entrepreneuriat, Innovation, Programmation, Résolution de problème, Recherche de solutions, Mécanique, Electronique, Créer, Concevoir
Posté 24 avril 2012 - 09:54
C'est quoi les "ou" le lien ne marche pas chez moi
d'autres liens
http://electronique.rivalin.voila.net/cours_de_base/ch17.pdf
http://daniel.robert9.pagesperso-orange.fr/Digit/Pratique/Technologie_Digitale/Techno_Digit_2S.html
Si mon commentaire vous a plus laissez nous un avis !
Nouveau sur Robot Maker ?
Jetez un oeil aux blogs, aux tutoriels, aux ouvrages, au robotscope aux articles, à la boutique et aux différents services disponible !
En attendant qu'une bibliothèque de fichiers 3D soit mise en place n'hésitez pas à demander si vous avez besoin du fichier 3D d'un des produits de la boutique... On l'a peut être !
Si vous souhaitez un robot pilotable par internet n'hésitez pas à visiter www.vigibot.com et à lire le sous forum dédié à vigibot!
#77
Mike118
-
- Administrateur
-
- 10â¯341 messages
Staff Robot Maker
- Gender:Male
- Location:Anglet
- Interests:Robotique, Entrepreneuriat, Innovation, Programmation, Résolution de problème, Recherche de solutions, Mécanique, Electronique, Créer, Concevoir
Posté 24 avril 2012 - 12:25
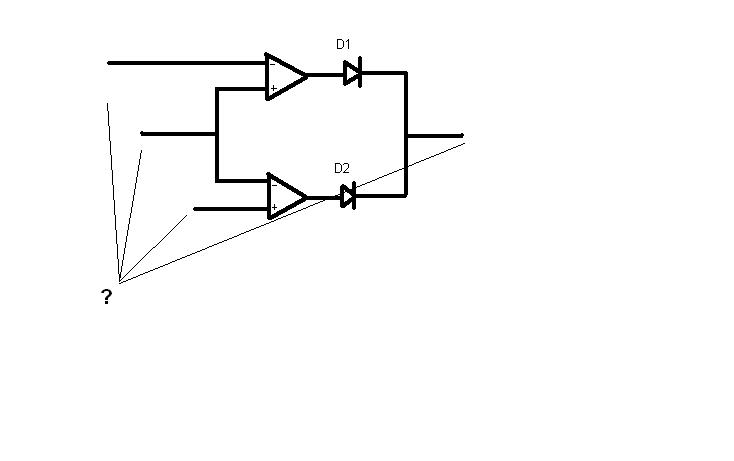
J'ai fais le comparateur mais je sais pas ou vont les fils que j'ai marqué avec le point d'interrogation
hum ... commence dans l'ordre de ce que je t'ais dis : avoir les Uc. Ensuite pars de ce que tu as et regarde ce que tu veux avoir et trouve le montages à faire conséquence.
Si mon commentaire vous a plus laissez nous un avis !
Nouveau sur Robot Maker ?
Jetez un oeil aux blogs, aux tutoriels, aux ouvrages, au robotscope aux articles, à la boutique et aux différents services disponible !
En attendant qu'une bibliothèque de fichiers 3D soit mise en place n'hésitez pas à demander si vous avez besoin du fichier 3D d'un des produits de la boutique... On l'a peut être !
Si vous souhaitez un robot pilotable par internet n'hésitez pas à visiter www.vigibot.com et à lire le sous forum dédié à vigibot!
#79
Mike118
-
- Administrateur
-
- 10â¯341 messages
Staff Robot Maker
- Gender:Male
- Location:Anglet
- Interests:Robotique, Entrepreneuriat, Innovation, Programmation, Résolution de problème, Recherche de solutions, Mécanique, Electronique, Créer, Concevoir
Posté 24 avril 2012 - 12:49
C'est quoi les uc ?
Uc1 et Uc2 dixit ici
"le but du jeu ou casse tête ^^ est d'avoir :
- 2 tensions variables réglable par potentiomètre Uc1 et Uc2
- d'avoir une pin A à -VCC si on est trop près du mur d'après le capteur 1 défini pour Um1=Uc1 et +Vcc si on estime qu'on est assez loin
- d'avoir une pin B à -VCC si on est trop près du mur d'après le capteur 2 défini pour Um2=Uc2 et +Vcc si on estime qu'on est assez loin
- d'avoir une pin C à +VCC si on est trop près du mur d'après le capteur 2 défini pour Um2=Uc2 et -Vcc si on estime qu'on est assez loin
- d'avoir une pin D à environ 2-3V si A est à VCC ou si B est à VCC sinon D est à 0V
- d'avoir une pin E à environ 2-3V si A est à VCC ou si C est à VCC sinon E est à 0V
"
Si mon commentaire vous a plus laissez nous un avis !
Nouveau sur Robot Maker ?
Jetez un oeil aux blogs, aux tutoriels, aux ouvrages, au robotscope aux articles, à la boutique et aux différents services disponible !
En attendant qu'une bibliothèque de fichiers 3D soit mise en place n'hésitez pas à demander si vous avez besoin du fichier 3D d'un des produits de la boutique... On l'a peut être !
Si vous souhaitez un robot pilotable par internet n'hésitez pas à visiter www.vigibot.com et à lire le sous forum dédié à vigibot!
Répondre à ce sujet









0 utilisateur(s) li(sen)t ce sujet
0 members, 0 guests, 0 anonymous users

