
Bonjour, me projet serai de faire un quadricoptère(exemple).
J'ai pris pour base un raspberry Pi avec un module wifi en USB.
Je débute en électronique et j'ai une tonne de question a poser si sa ne dérange pas.
J'ai fait quelque recherche sur le sujet, voila se que j'ai compris:
-Pas besoin de pont en H pour mon projet
-utilisation de PWM pour commander la vitesse des moteur
-Utilisation de transistor avec mes sortie PWM
-Utilisation d'un opto-coupleur pour proteger mon Raspberry
-2 batterie une pour les moteur l'autre pour le Raspberry Pi.
Mes question:
-je n'est pas compri ce shéma, l'utilité de la LED en parallèle du moteur et pourquoi la batte en bas a droite de l'opto-coupleur et est connecté au mosfet.
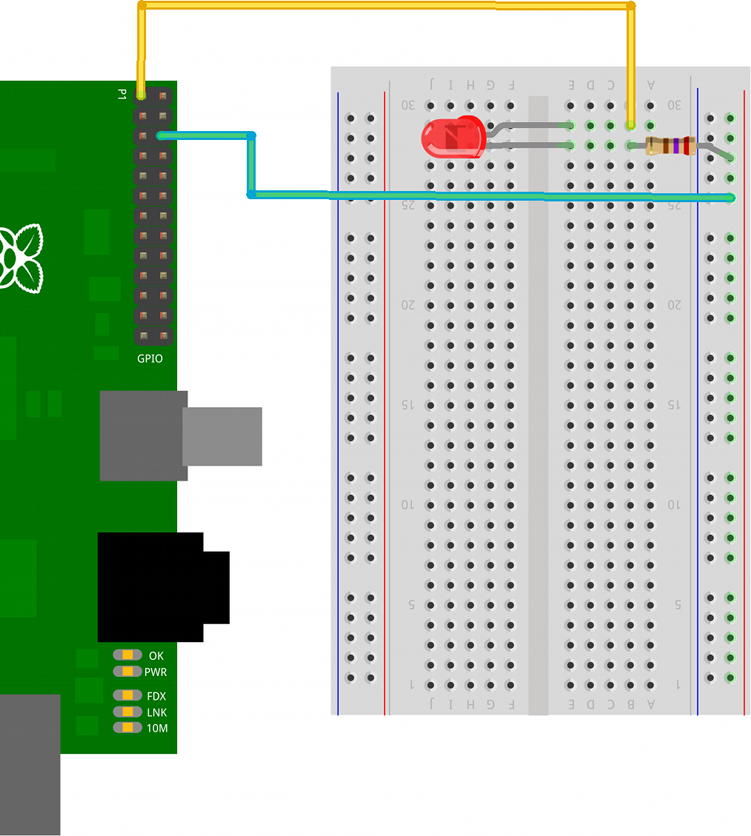
-Pourquoi sur tout les schéma électronique simple avec juste une LED il y a souvent une résistance entre la LED et la MASSE du Raspberry ?
-Avec ma batterie consacré au moteur je suppose que plus il y a de batterie - les moteurs aurons de puissance? Ou sa dépende du faite que je les branche en parallèle ou a la suite ?

37 réponses à ce sujet
#2

Microrupteurman
-

- Modérateur
-

- 2â¯210 messages
Pilier du forum
- Gender:Male
- Location:Aquitaine,Gironde
- Interests:Tout
Posté 18 septembre 2012 - 04:27
la différence entre les ampère et les volt
Je te deconseil de faire un "drone".
Page Facebook : https://www.facebook...appartelier2.0/
Page Twitter : https://twitter.com/2Appartelier (bateau seulement)
Boutique Robot-Maker : https://www.robot-ma...er-20/produits/
Besoin d'une impression 3D grand format ? Contactez moi !
#3
thermo_nono
-

- Membres
-
- 825 messages
Membre passionné
Posté 18 septembre 2012 - 05:09
les ampères indiquent la quantité de courant qui traverse le circuit... les volts représentent la différence entre les potentiels électriques de deux points de ton circuit.
... je dois dire que tu te lance dans un gros gros projet.. je te conseille de commencer par un truc qui reste au sol.
... je dois dire que tu te lance dans un gros gros projet.. je te conseille de commencer par un truc qui reste au sol.
#4
oasis
-
- Membres
- 23 messages
Nouveau membre
Posté 18 septembre 2012 - 05:15
Quand je demande la différence c'est au point du vue physique avec les electron.(cette question n'est que par curiosité)
J'ai déjà réalisé un circuit simple (une led qui s'allume quand j'ai un mail), je cherche un chose un peut plus complexe.
J'ai modifier mon premier POST
J'ai déjà réalisé un circuit simple (une led qui s'allume quand j'ai un mail), je cherche un chose un peut plus complexe.
J'ai modifier mon premier POST
#5
R1D1
-

- Modérateur
-
- 1â¯212 messages
Modérateur et Membre passionné
- Gender:Male
- Location:Autriche
Posté 18 septembre 2012 - 09:19
Quand je demande la différence c'est au point du vue physique avec les electron.(cette question n'est que par curiosité)
-Pourquoi sur tout les schéma électronique simple avec juste une LED il y a souvent une résistance entre la LED et la MASSE du Raspberry ?
Si tu demandes quelle est la différence d'un point de vue physique entre les ampères et les volts ... Je te répondrais bien que c'est que les uns sont négatifs et les autres sont positifs mais tu pourrais me croire.

http://fr.wikipedia.org/wiki/Potentiel_électrique
http://fr.wikipedia.org/wiki/Énergie_potentielle_électrique
http://fr.wikipedia.org/wiki/Électromagnétisme
Ton projet de drone, c'est très complexe si tu n'y connais pas grand chose en électronique. Commence par un projet simple (une base mobile, quelques capteurs) pour comprendre l'utilité des composants et leur montage.
La diode est une diode de roue libre, pour éviter les surtensions à la commutation de ton moteur.
Ton opto-coupleur joue le rôle d'isolateur entre la carte et la partie puissance (rôle d'un pont en H en général). Lorsque que la diode photosensible est passante, elle permet le passage du courant sur la Grille du Mosfet.
La présence d'une résistance avec une LED : c'est de l'électronique de base. Si tu as une LED à perdre, fais l'expérience : connecte une pile directement à ta LED. Tu pourras t'en servir comme roue folle ensuite ...

Sinon bon courage pour ton drone.
#6
oasis
-
- Membres
- 23 messages
Nouveau membre
Posté 19 septembre 2012 - 07:09
je n'aurai pas du poser la question sur l'intensité du courant...
Je ne comprend pas pourquoi on se focalise sur sa je connais la différence entre le volte et l'intensité le volte est la différence de potentiel entre les deux borne + et - et l'intensité est la puissance du courant.
Si je me souviens d'un point de vue physique pour la différence de potentiel c'est que sur la borne + il y a ion charger et sur le - ion décharger ? Enfin passons...
Je sais qu'il faut placer une résistance avant une led pour diminué l'intensité du courant dans le circuit et que la led ne grille pas.
L'intensité retiré au circuit et dicipé sous forme de chaleur .
mais moi je parle de après.
(https://projects.dro.../06/1led_bb.jpg)
Je ne comprend pas pourquoi on se focalise sur sa je connais la différence entre le volte et l'intensité le volte est la différence de potentiel entre les deux borne + et - et l'intensité est la puissance du courant.
Si je me souviens d'un point de vue physique pour la différence de potentiel c'est que sur la borne + il y a ion charger et sur le - ion décharger ? Enfin passons...
Je sais qu'il faut placer une résistance avant une led pour diminué l'intensité du courant dans le circuit et que la led ne grille pas.
L'intensité retiré au circuit et dicipé sous forme de chaleur .
mais moi je parle de après.
(https://projects.dro.../06/1led_bb.jpg)
#7
R1D1
-
- Modérateur
-
- 1â¯212 messages
Modérateur et Membre passionné
- Gender:Male
- Location:Autriche
Posté 19 septembre 2012 - 08:29
Ne le prends pas mal mais ce que tu nous dis montre que tu ne comprends pas tout à fait toutes ces notions. Ça n'est pas un défaut, on a tous été débutants. Mais pense seulement que le projet que tu veux faire est particulièrement complexe et qu'il est nécessaire que bien comprendre les concepts de base (et plus) avant de s'y lancer.
L'intensité est un débit : un nombre de charges qui passe dans une section donné pendant un temps donné. Par analogie avec l'eau, l'intensité est le débit d'une cascade (soit le nombre de litres qui s'élance d'en haut en une seconde), le potentiel est l'altitude de chaque point de la cascade. La tension, ou différence de potentiel représente le dénivelé et par extension l'énergie disponible, pour faire tourner une roue à aubes par exemple (corrigez-moi s'il y a une imprécision).
Comme tu le dis, uneLED résistance limite l'intensité pour que le nombre de charges qui passent dans le composant ne soit pas trop important. Maintenant, si tu imagines ton circuit comme une tuyauterie, une résistance peut être vue comme un tuyau de circonférence plus petite. Maintenant, je te laisse conclure ce que placer ce tuyau plus petit avant ou après change au débit d'eau dans ton circuit.
L'intensité est un débit : un nombre de charges qui passe dans une section donné pendant un temps donné. Par analogie avec l'eau, l'intensité est le débit d'une cascade (soit le nombre de litres qui s'élance d'en haut en une seconde), le potentiel est l'altitude de chaque point de la cascade. La tension, ou différence de potentiel représente le dénivelé et par extension l'énergie disponible, pour faire tourner une roue à aubes par exemple (corrigez-moi s'il y a une imprécision).
Comme tu le dis, une
- thermo_nono aime ceci
#8
Black Templar
-

- Membres
-
- 1â¯430 messages
Membre
- Gender:Male
- Location:Lille
Posté 19 septembre 2012 - 08:37
+1, au vu de toutes tes questions, il serait mieux de commencer par apprendre les bases avant de te lancer dans un projet aussi complexe que compliqué.Je te deconseil de faire un "drone".
Voila les bases dont tu auras besoin pour commencer un tel projet. S'il y a des choses que tu ne connais pas, ça veut dire qu'il faut que tu trouves un projet beaucoup plus simple !
- Loi d'ohm et calcul de puissance ?
- Différence entre le monde analogique et numérique ?
- Savoir programmer un microcontroleur (matériel) ?
- Savoir concevoir des filtres (analogique, c'est plus facile) ? (passe-bas/haut/bande, fréquence de coupure à -3dB, atténuation en bande passante, etc.)
- Savoir asservir un système à l'aide d'un proportionnel intégrateur ?
- Avoir des connaissances en électronique de puissance ?
- Savoir utiliser et contrôler un moteur brushless ?
- Maîtriser le transistor (en commutation du moins) ?
- J'en oublie plein !...
Pont en H = interface de puissanceJ'ai fait quelque recherche sur le sujet, voila se que j'ai compris:
-Pas besoin de pont en H pour mon projet
-utilisation de PWM pour commander la vitesse des moteur
-Utilisation de transistor avec mes sortie PWM
-Utilisation d'un opto-coupleur pour proteger mon Raspberry
-2 batterie une pour les moteur l'autre pour le Raspberry Pi.
Transistor pour moteur = interface de puissance
Si tu utilises des moteurs brushless, tu n'auras pas besoin de pont en H, mais d'une électronique bien plus compliqué qui sera de toute manière ton interface de puissance (contrôleur brushless).
Donc pour contrôler un moteur avec un signal PWM, tu auras besoin dintercaler une interface de puissance entre les 2.
Le lien ne marche pas chez moi. Mais ce n'est pas une LED qui est en parallèle du moteur, mais une diode que l'on appelle diode de roue libre. Car lorsque tu coupes l'alimentation, la bobine est considéré alors comme une source de courant. Et il ne peut avoir de discontinuité de courant !! Donc si tu n'as pas de diode de roue libre, tu abîmes ton montage ! La diode permet au courant de "s'évacuer" progressivement sans discontinuité (pour faire simple) ça tu l'as compris, c'est bien.-je n'est pas compri ce shéma, l'utilité de la LED en parallèle du moteur et pourquoi la batte en bas a droite de l'opto-coupleur et est connecté au mosfet.
Comme je n'ai dit, je n'ai pas accès au schéma, mais à mon avis, l'optocoupleur commande tout simplement ton transistor ^^
Tu as répondu à la question juste avant-Pourquoi sur tout les schéma électronique simple avec juste une LED il y a souvent une résistance entre la LED et la MASSE du Raspberry ?
??? oui ça dépend du branchement, mais attention aux spécifications du moteur ! Si c'est un moteur 12V et que tu lui donne du 24V, il ne va pas apprécier !!-Avec ma batterie consacré au moteur je suppose que plus il y a de batterie - les moteurs aurons de puissance? Ou sa dépende du faite que je les branche en parallèle ou a la suite ?
Si par contre, tu met 2 batteries de 12V en parallèle, tu n'auras pas plus de puissance, mais tes batteries tiendront deux fois plus longtemps (en faisant l'hypothèse que tu as bien dimensionné tes batteries en fonction de te moteurs).
Sinon, pour un drone, ne tattardes pas sur les moteurs à courant continus, mais regarde plutôt le fonctionnement des moteurs brushless.
Non, le Volt, c'est l'unité de la tension.le volte est la différence de potentiel entre les deux borne + et -
La tension, c'est une différence de potentiel.
Non, l'intensité d'un courant, c'est la valeur de celui-ci.l'intensité est la puissance du courant.
L'intensité, c'est un débit de charge électrique. (scalaire)
Le courant, plus généralement, c'est le déplacement de charges électriques
D'un point de vue physique, c'est circulation du champs électrique qui est un gradient de potentiel, donc une différence de potentiel (Cf. Cours d'électromagnétisme pour comprendre physiquement ces notions).Si je me souviens d'un point de vue physique pour la différence de potentiel c'est que sur la borne + il y a ion charger et sur le - ion décharger ? Enfin passons...
Les ions ne sont présent que dans une solutions, pas dans un métal.
C'est ça. Tu peux même connaître la valeur de cette limitation de courant grâce à la loi d'ohm U=RI (ça te dit quelque chose ?)Je sais qu'il faut placer une résistance avant une led pour diminué l'intensité du courant dans le circuit et que la led ne grille pas.
L'intensité retiré au circuit et dicipé sous forme de chaleur .
Quand à la puissance dissipé, elle est égale au produit de la tension aux bornes de la résistance et de l'intensité qui la traverse.
++
Black Templar
Mon site internet : http://ferdinandpiette.com/
#9
Black Templar
-
- Membres
-
- 1â¯430 messages
Membre
- Gender:Male
- Location:Lille
Posté 19 septembre 2012 - 08:39
EDIT : Grilled by R1D1 !!
J'aime bien ton analogie pour la tension !
Une résistance tu veux dire
J'aime bien ton analogie pour la tension !
Comme tu le dis, une LED limite l'intensité pour que le nombre de charges qui passent dans le composant ne soit pas trop important.
Une résistance tu veux dire
Mon site internet : http://ferdinandpiette.com/
#10
R1D1
-
- Modérateur
-
- 1â¯212 messages
Modérateur et Membre passionné
- Gender:Male
- Location:Autriche
Posté 19 septembre 2012 - 09:22
Damned ! Pour une fois que c'est pas moi la LED en surtension !EDIT : Grilled by R1D1 !!
J'aime bien ton analogie pour la tension !
L'analogie vient de mon prof d'élec de terminale, le saint homme (ou pas), qui sous ses dehors bourrus savait nous faire sentir les choses. Tout à fait. Je corrige.Une résistance tu veux dire
#11
oasis
-
- Membres
- 23 messages
Nouveau membre
Posté 19 septembre 2012 - 09:39
merci beaucoup pour cette réponse je vais relire tout sa faire des recherche et reviendrai si j'ai des question ou pour parler de l'avancement de mes recherche.
Je connais la loi d'ohm mais je vous avoue que quand j'était en cour en dehors de la programmation, je zappais ... Donc j'ai de vague souvenir.
voila les schémas en question : http://www.siliciumcorp.com/robotique/electronique/controler-moteur-brosse/
Je vais commencer pas comprend :
-le fonctionnement des transistor pour savoir pourquoi il peut y avoir des retour.
-Dans quelle direction par le courant créer par le moteur quand je coupe son alimentation.
-Et toute les info que tu ma donner.
Je vais pas faire le drone de suite déjà je vais faire tourné un moteur.
Merci encore!
Je connais la loi d'ohm mais je vous avoue que quand j'était en cour en dehors de la programmation, je zappais ... Donc j'ai de vague souvenir.
J'ai déja fait des recherche sur le fonctionnement des pont en H et j'ai compris leur fonctionnement. Dans mon cas sa sera un transistor ? Qui par le signale numérique fera varié l'intensité moyen(dans le temp) qui passera par le moteur. Sa n'est pas si compliquer ? Ou j'ai surement mal comprisSi tu utilises des moteurs brushless, tu n'auras pas besoin de pont en H, mais d'une électronique bien plus compliqué qui sera de toute manière ton interface de puissance (contrôleur brushless).
Donc pour contrôler un moteur avec un signal PWM, tu auras besoin d’intercaler une interface de puissance entre les 2.
voila les schémas en question : http://www.siliciumcorp.com/robotique/electronique/controler-moteur-brosse/
Je vais commencer pas comprend :
-le fonctionnement des transistor pour savoir pourquoi il peut y avoir des retour.
-Dans quelle direction par le courant créer par le moteur quand je coupe son alimentation.
-Et toute les info que tu ma donner.
Je vais pas faire le drone de suite déjà je vais faire tourné un moteur.
Merci encore!
#12
Black Templar
-
- Membres
-
- 1â¯430 messages
Membre
- Gender:Male
- Location:Lille
Posté 19 septembre 2012 - 10:27
C'est déjà bien plus réalisteJe vais pas faire le drone de suite déjà je vais faire tourné un moteur.
Une première étape nécessaire.Si c'est pour faire un drone, comme je te l'ai dit, utilise des moteur brushless qui sont des moteurs triphasé !!!! Le fonctionnement n'a rien à voir avec les moteur à courant continue que tu nous montre là !J'ai déja fait des recherche sur le fonctionnement des pont en H et j'ai compris leur fonctionnement. Dans mon cas sa sera un transistor ? Qui par le signale numérique fera varié l'intensité moyen(dans le temp) qui passera par le moteur. Sa n'est pas si compliquer ? Ou j'ai surement mal compris
On les commande grâce à un contrôleur ESC. (pas de pont en H ni de simple transistor, mais une électronique bien plus élaborée !!!!)
Mon site internet : http://ferdinandpiette.com/
#14
Black Templar
-
- Membres
-
- 1â¯430 messages
Membre
- Gender:Male
- Location:Lille
Posté 19 septembre 2012 - 11:22
Ha ok mais alors j'ai une question pour du triphasé ?
(Mon petit drone sera pas plus grand que celui dans l'exemple enfin si sa trouve le choix tu triphasé n'a pas de rapport avec la puissance...)
?? Non, les moteurs brushless sont très utilisés en modélisme, surtout pour faire voler des avions/hélico.
Ils sont plus petit, plus légé, plus puissant, avec plus de rendement que les moteurs cc classique. En contre parti, l'électronique de contrôle est plus complexe.
Fait une recherche sur ce qu'est un moteur brushless !
Mon site internet : http://ferdinandpiette.com/
#17
oasis
-
- Membres
- 23 messages
Nouveau membre
Posté 19 septembre 2012 - 12:59
Pour finir ESC n'est pas tres dure a comprendre : http://www.robot-maker.com/forum/topic/6233-controler-variateur-de-vitesse-moteur-avec-arduino/
Mais il reste certaine question je continue mes recherche.
edit : j'ai selectioné (pas acheter)
http://www.hobbyking.com/hobbyking/store/__4318__TURNIGY_Plush_6A_8bec_6g_Speed_Controller.html
http://www.hobbyking.com/hobbyking/store/uh_viewItem.asp?idProduct=5358&aff=101931&buddycode=E083C2AF-747C-432D-A01A-129A105DB2F8
Je vais lire les docs...
Mais il reste certaine question je continue mes recherche.
edit : j'ai selectioné (pas acheter)
http://www.hobbyking.com/hobbyking/store/__4318__TURNIGY_Plush_6A_8bec_6g_Speed_Controller.html
http://www.hobbyking.com/hobbyking/store/uh_viewItem.asp?idProduct=5358&aff=101931&buddycode=E083C2AF-747C-432D-A01A-129A105DB2F8
Je vais lire les docs...
#18
Melmet
-

- Modérateur
-
- 1â¯527 messages
Membre chevronné
- Gender:Male
Posté 19 septembre 2012 - 06:01
Oasis Oasis c'est bon, c'est bon..... (ok je sors) 
c'est bien tu fait des recherches sur le forum et sur google.
je n'arrive pas a connaitre ton niveau "technologique", mais commence par le début comme l'as dit notre Maître : "Black Templar" (et oui c'est un dieu pour moi)
si tu veux des cours sur un point particulier en electro, je verrais bien si je peu te scanner les cours et les poster.
c'est bien tu fait des recherches sur le forum et sur google.
je n'arrive pas a connaitre ton niveau "technologique", mais commence par le début comme l'as dit notre Maître : "Black Templar" (et oui c'est un dieu pour moi)
si tu veux des cours sur un point particulier en electro, je verrais bien si je peu te scanner les cours et les poster.
#20
Black Templar
-
- Membres
-
- 1â¯430 messages
Membre
- Gender:Male
- Location:Lille
Posté 19 septembre 2012 - 06:44
mais commence par le début comme l'as dit notre Maître : "Black Templar" (et oui c'est un dieu pour moi)
^^ ça me rappelle mon prof de web/réseau :
Alors c'est très simple : vous avez Dieu.
Au dessus, il y a su.
Encore au dessus il y a Chuck Norris.
Enfin, il y a moi.
Si vous me faites chiez, je ramène ma cross de Hockey !
Un professeur génial
Mon site internet : http://ferdinandpiette.com/
Répondre à ce sujet









1 utilisateur(s) li(sen)t ce sujet
0 members, 1 guests, 0 anonymous users





{kind=link}
{kind=link}