
Voici un petit robot que j'aime beaucoup, le petit robot sphérique Sphéro !
http://www.gosphero.com/
Seulement j'aimerais avoir des informations sur son fonctionnement et je ne trouve que des articles commerciaux qui ne comportent que peu d'intérêt.
Est ce que quelqu'un connaîtrait un lien où son fonctionnement est expliqué. Ou peut être savez vous vous même comment il fonctionne.
Merci de votre aide

4 réponses à ce sujet
#2

Microrupteurman
-

- Modérateur
-

- 2â¯210 messages
Pilier du forum
- Gender:Male
- Location:Aquitaine,Gironde
- Interests:Tout
Posté 20 septembre 2012 - 03:48
Salut, il y a sans doute une autre boule a l'interrieur est des roues entre les deux parroi qui sont actionné par la sphere centrale et font changé le centre de gravité, ce qui lui permet ces mouvement.
Page Facebook : https://www.facebook...appartelier2.0/
Page Twitter : https://twitter.com/2Appartelier (bateau seulement)
Boutique Robot-Maker : https://www.robot-ma...er-20/produits/
Besoin d'une impression 3D grand format ? Contactez moi !
#3
skyhack
-

- Membres
-
- 885 messages
Membre passionné
- Gender:Male
- Location:Racourt et Flaba (08)
- Interests:Synthé, modélisation mécanique, bricolage divers, VTT enduro
Posté 20 septembre 2012 - 04:03
Il y a plusieurs façon de faire un robot boule par exemple celui là :
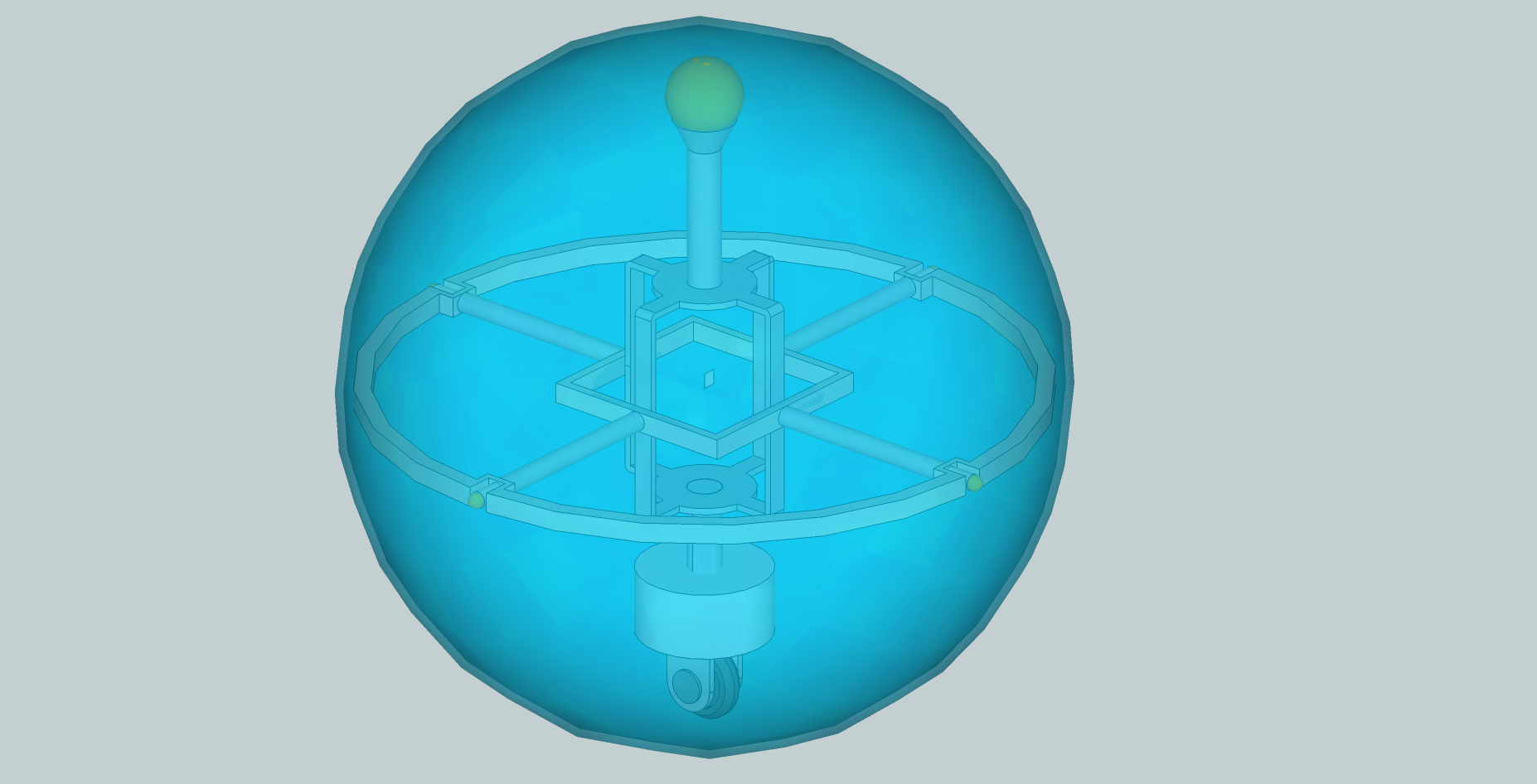
En jaune ce sont des billes plastiques qui permettent de rouler dans toutes les directions.
En bas il y a le système moteur non détaillé qui fait rouler la boule sur elle même grâce à la petite roue en bas, pour changer de direction l'axe et la roue tourne sur eux même permettant ainsi de tourner à gauche, à droite ou de faire demi-tour.
Il y a un contrepoids en bas afin que le robot évite de se renverser, de toute façon il faut privilégier un centre de gravité très bas afin de palier naturellement ce problème de renversement.
Bien que cela semble intéressant, le réel avantage d'un robot boule n'a jamais été exploité depuis que je parcours le net. Pour le robot c'est juste comme une grande roue, rien de plus.
skyhack.
PS: Pour faire ce genre de robot ça n'est vraiment pas compliqué et presque tout peut être fait à la main ou avec des matériaux simple et accessibles.
En jaune ce sont des billes plastiques qui permettent de rouler dans toutes les directions.
En bas il y a le système moteur non détaillé qui fait rouler la boule sur elle même grâce à la petite roue en bas, pour changer de direction l'axe et la roue tourne sur eux même permettant ainsi de tourner à gauche, à droite ou de faire demi-tour.
Il y a un contrepoids en bas afin que le robot évite de se renverser, de toute façon il faut privilégier un centre de gravité très bas afin de palier naturellement ce problème de renversement.
Bien que cela semble intéressant, le réel avantage d'un robot boule n'a jamais été exploité depuis que je parcours le net. Pour le robot c'est juste comme une grande roue, rien de plus.
skyhack.
PS: Pour faire ce genre de robot ça n'est vraiment pas compliqué et presque tout peut être fait à la main ou avec des matériaux simple et accessibles.
" Monsters are real. Ghosts are real too.
They live inside us and sometimes they win."
-------------Stephen King.------------------
" le fait que les extraterrestres étaient amis avec les Mayas ne signifie pas qu'ils sont nos amis ... "
-------------------------------------Stephen Hawking----------------------------------------------------
They live inside us and sometimes they win."
-------------Stephen King.------------------
" le fait que les extraterrestres étaient amis avec les Mayas ne signifie pas qu'ils sont nos amis ... "
-------------------------------------Stephen Hawking----------------------------------------------------
#4
Jep31
-
- Membres
- 43 messages
Nouveau membre
- Gender:Male
- Location:Toulouse France
Posté 20 septembre 2012 - 05:16
Merci pour ta réponse.
Ce système à effectivement l'air assez simple de fonctionnement.
Il est fort probable que cette boule fonctionne ainsi.
Au départ j'avais plus en tête un système comme celui ci:
Je ne me souvient plus de son fonctionnement, il incorpore des gyroscopes. Après je sais plus si c'est pour remplacer le contre poids ou le moteur de la roue motrice.
Comment pense tu qu'on pourrait utiliser ce type de robot ?
Ce système à effectivement l'air assez simple de fonctionnement.
Il est fort probable que cette boule fonctionne ainsi.
Au départ j'avais plus en tête un système comme celui ci:
Je ne me souvient plus de son fonctionnement, il incorpore des gyroscopes. Après je sais plus si c'est pour remplacer le contre poids ou le moteur de la roue motrice.
Comment pense tu qu'on pourrait utiliser ce type de robot ?
#5
skyhack
-
- Membres
-
- 885 messages
Membre passionné
- Gender:Male
- Location:Racourt et Flaba (08)
- Interests:Synthé, modélisation mécanique, bricolage divers, VTT enduro
Posté 20 septembre 2012 - 08:24
En fait j'avais un projet il y a longtemps d'un robot sous forme sphérique mais qui utiliserait vraiment sa forme sphérique comme un atout et non comme une nouvelle forme juste pour le fun.
Étant depuis toujours porté sur la robotique militaire à visée d'observation et de renseignement, j'avais en tête un robot qui a au premier abord la forme sphérique. Quand on l'utilise sur le terrain on le déploie soit en le lançant à la main, soit par un système du type bazouka mais à air comprimé. Ainsi quand le robot arrive là où il se pose il se déplie. En réalité il ne reste que peu de temps sphérique car quand il se déplie il a plutôt la forme d'un dafalgan (^^) les 2 hémisphères lui servant ainsi de part et d'autre de roue de propulsion, le segment au centre du robot restant à la charge d'un système de caméra mobile et d'un système de franchissement d'obstacle, je m'explique.
Un moment j'avais vu dans un Elektor (revue d'électronique) comment réaliser un propulseur électromagnétique pour lancer un ballon de foot miniature pour un robot de compétition voir humanoïde. Ce système utilise le circuit électronique d'un flash d'appareil photo classique jetable (si ça existe encore je sais pas) qui, une fois couplé à une simple électronique de commande permet de contrôler une bobine creuse de fil de cuivre faisant ainsi bouger très rapidement une barre d'acier placée à l'intérieur de la bobine. Ainsi j'avais pensé mettre ce système à mon robot lui permettant ainsi de franchir des murets, murs, passer par une fenêtre ou un barbelé ou que sais-je encore. Le piston pourra alors être soit toujours dirigé vers le bas, le robot devra alors prendre de l'élan s'il veut sauter de façon parabolique, ou alors avec un piston qui peut se pencher d'avant en arrière lui permettant ainsi une meilleur visée.
Une fois sur le terrain le robot peut, s'il doit par exemple dévaler une pente ou alors se lancer d'un étage ou autre, il n'a plus qu'à se refermer dans sa coque qui redevient ainsi sphérique et solide, ainsi il roule et se re-deplie une fois que sa position lui convient.
Ainsi on peut imaginer une surface de type caoutchouteuse avec des sillons de type pneumatique afin de lui permettre une accroche optimale sur tout type de terrain.
J'avais aussi pensé à un système lui permettant de se verrouiller afin de ne pas être trafiqué s'il était capturé par lennemie, voir même pourquoi pas un système dauto destruction en cas de menace imminente.
Le robot pourra (et même devra) travailler en groupe voir en essaim afin de permettre une plus grande amplitude de recherche et une cartographie rapide du terrain afin de permettre le bon déroulement de la mission. Ainsi une fois la mission terminé sois les troupes au sol localisent par GPS le traceur qu'envoie le robot, sois les robot reviennent d'eux même à un endroit qu'ils ont jugé en sécurité afin d'attendre la récupération.
J'ai nommé ce robot THOR en hommage au dieux de la guerre, et parce que aussi ça fait peur et c'est pas un robot domestique donc autant mettre un nom qui impressionne de suite ^^ .
Par la suite j'ai toujours un autre grand, très grand robot qu'il m'est dans ma situation presque impossible à réaliser par moi même, et qui utilise les robot THOR comme acolyte permettant ainsi au robot " mère " d'effectuer un trajet le plus sûr possible dans un minimum de temps afin de toujours prendre le dessus sur l'ennemie. Mais ce projet est tellement pour moi et en fonction de ce que je sais de la robotique militaire et de ce qui se fait, une telle innovation qui une fois divulgué sur internet ferra le repas de bon nombre de personne qui accaparerons le projet, donc non je ne dirait jamais rien sur l'autre robot, trop dangereux, surtout dans le domaine militaire.
skyhack.

Étant depuis toujours porté sur la robotique militaire à visée d'observation et de renseignement, j'avais en tête un robot qui a au premier abord la forme sphérique. Quand on l'utilise sur le terrain on le déploie soit en le lançant à la main, soit par un système du type bazouka mais à air comprimé. Ainsi quand le robot arrive là où il se pose il se déplie. En réalité il ne reste que peu de temps sphérique car quand il se déplie il a plutôt la forme d'un dafalgan (^^) les 2 hémisphères lui servant ainsi de part et d'autre de roue de propulsion, le segment au centre du robot restant à la charge d'un système de caméra mobile et d'un système de franchissement d'obstacle, je m'explique.
Un moment j'avais vu dans un Elektor (revue d'électronique) comment réaliser un propulseur électromagnétique pour lancer un ballon de foot miniature pour un robot de compétition voir humanoïde. Ce système utilise le circuit électronique d'un flash d'appareil photo classique jetable (si ça existe encore je sais pas) qui, une fois couplé à une simple électronique de commande permet de contrôler une bobine creuse de fil de cuivre faisant ainsi bouger très rapidement une barre d'acier placée à l'intérieur de la bobine. Ainsi j'avais pensé mettre ce système à mon robot lui permettant ainsi de franchir des murets, murs, passer par une fenêtre ou un barbelé ou que sais-je encore. Le piston pourra alors être soit toujours dirigé vers le bas, le robot devra alors prendre de l'élan s'il veut sauter de façon parabolique, ou alors avec un piston qui peut se pencher d'avant en arrière lui permettant ainsi une meilleur visée.
Une fois sur le terrain le robot peut, s'il doit par exemple dévaler une pente ou alors se lancer d'un étage ou autre, il n'a plus qu'à se refermer dans sa coque qui redevient ainsi sphérique et solide, ainsi il roule et se re-deplie une fois que sa position lui convient.
Ainsi on peut imaginer une surface de type caoutchouteuse avec des sillons de type pneumatique afin de lui permettre une accroche optimale sur tout type de terrain.
J'avais aussi pensé à un système lui permettant de se verrouiller afin de ne pas être trafiqué s'il était capturé par lennemie, voir même pourquoi pas un système dauto destruction en cas de menace imminente.
Le robot pourra (et même devra) travailler en groupe voir en essaim afin de permettre une plus grande amplitude de recherche et une cartographie rapide du terrain afin de permettre le bon déroulement de la mission. Ainsi une fois la mission terminé sois les troupes au sol localisent par GPS le traceur qu'envoie le robot, sois les robot reviennent d'eux même à un endroit qu'ils ont jugé en sécurité afin d'attendre la récupération.
J'ai nommé ce robot THOR en hommage au dieux de la guerre, et parce que aussi ça fait peur et c'est pas un robot domestique donc autant mettre un nom qui impressionne de suite ^^ .
Par la suite j'ai toujours un autre grand, très grand robot qu'il m'est dans ma situation presque impossible à réaliser par moi même, et qui utilise les robot THOR comme acolyte permettant ainsi au robot " mère " d'effectuer un trajet le plus sûr possible dans un minimum de temps afin de toujours prendre le dessus sur l'ennemie. Mais ce projet est tellement pour moi et en fonction de ce que je sais de la robotique militaire et de ce qui se fait, une telle innovation qui une fois divulgué sur internet ferra le repas de bon nombre de personne qui accaparerons le projet, donc non je ne dirait jamais rien sur l'autre robot, trop dangereux, surtout dans le domaine militaire.
skyhack.
" Monsters are real. Ghosts are real too.
They live inside us and sometimes they win."
-------------Stephen King.------------------
" le fait que les extraterrestres étaient amis avec les Mayas ne signifie pas qu'ils sont nos amis ... "
-------------------------------------Stephen Hawking----------------------------------------------------
They live inside us and sometimes they win."
-------------Stephen King.------------------
" le fait que les extraterrestres étaient amis avec les Mayas ne signifie pas qu'ils sont nos amis ... "
-------------------------------------Stephen Hawking----------------------------------------------------








1 utilisateur(s) li(sen)t ce sujet
0 members, 1 guests, 0 anonymous users




