
Cette discussion est très intéressante, comme je l'ai dis plus haut je n'ai jamais touché à la radiocommande et n'ai par conséquent aucune connaissance en servos, c'est mes premières armes donc tout à apprendre, et j'aime bien maîtriser mon sujet.
Avant de faire quoi que ce soit je vais finir le bras car j'ai quelques inquiétudes sur ses capacités à manier la grosse pince qui est finalement assez lourde. J'ai pourtant équipé le bras de servos 13kg/cm mais ça ne me parle pas plus que çà tant que je n'ai pas plus d'expérience en la matière.
Tout çà pour dire qu'il faudra peut-être que je reconstruise une autre pince plus légère si le bras peine de trop, peut-être avec les servos déportés sur l'embase et qui commanderont la pince par des câble de vélo, je ne sais pas encore.
Pour lélectronique pas de soucis, c'était mon ancien métier. J'ai un peu oublié les formules mathématiques depuis le temps mais la pratique est là.

129 réponses à ce sujet
#82

skyhack
-

- Membres
-

- 885 messages
Membre passionné
- Gender:Male
- Location:Racourt et Flaba (08)
- Interests:Synthé, modélisation mécanique, bricolage divers, VTT enduro
Posté 03 décembre 2012 - 06:57
Ne t'inquiète pas pour le couple des servos. Ce sont des towerpro 13kg/cm ! j'en ai acheté des pareils un moment et bien qu'il soit une copie en général d'un autre servo c'est vrai qu'ils sont costaud bien que très bruyant.
Tu sais un couple de 13kg/cm c'est assez important pour un servo. En pratique cela veut dire que le servo sera capable de retenir une masse de 13kg accroché à un palonnier de 1cm !!
Bref ça tiendra t'inquiète.
skyhack.
Tu sais un couple de 13kg/cm c'est assez important pour un servo. En pratique cela veut dire que le servo sera capable de retenir une masse de 13kg accroché à un palonnier de 1cm !!
Bref ça tiendra t'inquiète.
skyhack.
" Monsters are real. Ghosts are real too.
They live inside us and sometimes they win."
-------------Stephen King.------------------
" le fait que les extraterrestres étaient amis avec les Mayas ne signifie pas qu'ils sont nos amis ... "
-------------------------------------Stephen Hawking----------------------------------------------------
They live inside us and sometimes they win."
-------------Stephen King.------------------
" le fait que les extraterrestres étaient amis avec les Mayas ne signifie pas qu'ils sont nos amis ... "
-------------------------------------Stephen Hawking----------------------------------------------------
#83
F6FCO
-
- Membres
-
- 186 messages
Membre occasionnel
Posté 03 décembre 2012 - 07:27
Tu me rassures. Oui c'est des MG945, et le bruit ce n'est pas un problème dans ce cas, ça donnera une personnalité au robot.
J'ai fais quelques pièces du poignet aujourd'hui, j'ai utilisé un roulement de roller pour le mouvement rotatif de la pince. Ça devrait tourner demain si tout se passe bien.
J'ai fais quelques pièces du poignet aujourd'hui, j'ai utilisé un roulement de roller pour le mouvement rotatif de la pince. Ça devrait tourner demain si tout se passe bien.

#86
F6FCO
-
- Membres
-
- 186 messages
Membre occasionnel
Posté 04 décembre 2012 - 09:40
Ce n'est pas indiscret, c'est une BF24 SIDERMECA.
Il ne faisait pas beau aujourd'hui alors j'ai bien avancé le projet, cet a/m j'ai fini les paliers et axes en laiton.

Et tourné l'os du poignet, je ne sais pas comment ça s'appelle chez les robots/

Demain je finalise la mécanique et je passe aux câblages.

Il ne faisait pas beau aujourd'hui alors j'ai bien avancé le projet, cet a/m j'ai fini les paliers et axes en laiton.

Et tourné l'os du poignet, je ne sais pas comment ça s'appelle chez les robots/

Demain je finalise la mécanique et je passe aux câblages.

#87
F6FCO
-
- Membres
-
- 186 messages
Membre occasionnel
Posté 05 décembre 2012 - 02:20
Mécanique finie, ça commence à ressembler à un morceau de robot. Je vais rallonger les câbles de servos pour que tous arrivent derrière le bras ou se trouvera l'arduino. Cet après midi je vais en ville (oui, j'habite dans une grotte...) pour acheter une planche et lui faire un socle, il a la main un peu lourde.
Hormis le fait d'être capable de faire du morse je vais ensuite faire des essais pour d'autres fonctions: essayer de graver des circuits imprimés, le faire dessiner. Il y a quelques années je m'amusais à programmer des jeux de réflexion, j'ai envie de m'y remettre mais au lieu de jouer contre un écran le bras pourrait déplacer les pièces sur un vrai plateau, etc.
Dans un premier temps je compte lui placer quelques capteurs, genre le bras au repos qui s'anime brusquement et essaie de pincer dés qu'une main s'approche trop près, j'ai des nièces un peu touche à tout et je suis du genre taquin. Deux leds RVB figurant des yeux placées sur le dessus pourraient passer du jaune au rouge à cette occasion pour parfaire le coté obscur.
Par contre j'hésite un peu sur le genre de capteur, un module ultrason est un peu gros par rapport au bras et serait inesthétique, une ldr qui réagirait dés qu'un corps s'approche et masque la lumière... pas évident à mettre en oeuvre pour que ce soit efficace.
peut-être un module infrarouge dans ce genre, jamais utilisé ce genre de truc:
http://dx.com/p/ir-infrared-sensor-switch-module-121517
ou ce circuit que j'ai trouvé à Hong-Kong:
http://cgi.ebay.fr/New-HC-SR501-Human-Sensor-Module-Pyroelectric-Infrared-/270997950999?pt=LH_DefaultDomain_0&hash=item3f18bc9217
Celui-ci serait parfait pour détecter le déplacement d'une personne qui entrerait dans mon atelier et la suivre des yeux (des leds) dans ses déplacements. Et pourquoi ne pas rajouter une seringue remplie d'eau commandée par un servo... j'ai bien pensé au pointage laser mais trop dangereux pour les yeux, il faut rester raisonnable.
Si vous avez des idées sur les bons capteurs à utiliser je suis preneur...

Hormis le fait d'être capable de faire du morse je vais ensuite faire des essais pour d'autres fonctions: essayer de graver des circuits imprimés, le faire dessiner. Il y a quelques années je m'amusais à programmer des jeux de réflexion, j'ai envie de m'y remettre mais au lieu de jouer contre un écran le bras pourrait déplacer les pièces sur un vrai plateau, etc.
Dans un premier temps je compte lui placer quelques capteurs, genre le bras au repos qui s'anime brusquement et essaie de pincer dés qu'une main s'approche trop près, j'ai des nièces un peu touche à tout et je suis du genre taquin. Deux leds RVB figurant des yeux placées sur le dessus pourraient passer du jaune au rouge à cette occasion pour parfaire le coté obscur.
Par contre j'hésite un peu sur le genre de capteur, un module ultrason est un peu gros par rapport au bras et serait inesthétique, une ldr qui réagirait dés qu'un corps s'approche et masque la lumière... pas évident à mettre en oeuvre pour que ce soit efficace.
peut-être un module infrarouge dans ce genre, jamais utilisé ce genre de truc:
http://dx.com/p/ir-infrared-sensor-switch-module-121517
ou ce circuit que j'ai trouvé à Hong-Kong:
http://cgi.ebay.fr/New-HC-SR501-Human-Sensor-Module-Pyroelectric-Infrared-/270997950999?pt=LH_DefaultDomain_0&hash=item3f18bc9217
Celui-ci serait parfait pour détecter le déplacement d'une personne qui entrerait dans mon atelier et la suivre des yeux (des leds) dans ses déplacements. Et pourquoi ne pas rajouter une seringue remplie d'eau commandée par un servo... j'ai bien pensé au pointage laser mais trop dangereux pour les yeux, il faut rester raisonnable.
Si vous avez des idées sur les bons capteurs à utiliser je suis preneur...

#88
Melmet
-

- Modérateur
-
- 1â¯527 messages
Membre chevronné
- Gender:Male
Posté 05 décembre 2012 - 10:22
Je suis ton post depuis le début, j'ai franchement un grand respect pour ton travail et tes recherches et surtout pour ton expérience.
Ca fait du bien de voir quelqu'un partager ce qu'il arrive a faire avec ses moyens.
Tu habite dans quel coins déjà? (histoire de savoir si je prévoit un détour par chez toi pendant mes vacances )
)
Franchement: BRAVO ET MERCI a toi .
.
Ca fait du bien de voir quelqu'un partager ce qu'il arrive a faire avec ses moyens.
Tu habite dans quel coins déjà? (histoire de savoir si je prévoit un détour par chez toi pendant mes vacances
)Franchement: BRAVO ET MERCI a toi
.

#90
F6FCO
-
- Membres
-
- 186 messages
Membre occasionnel
Posté 08 décembre 2012 - 12:15
Bonjour à tout le monde,
Le bras est monté sur une planche qui servira de plaque d'essais, les câblages vers l'arduino sont terminés et j'ai commencé les premiers essais de programmation de mouvements. D'abord il a fallu trouver les limites de chaque déplacement en amplitude et déterminer les bonnes valeurs min et max en prog de chaque servo, j'ai bien failli exploser l'arduino avec un brusque mouvement tournant du bras au démarrage.
Première constatation, les servos de 13kg sont un peu justes en force, ils soulèvent le bras mais redescendent beaucoup trop vite emportés le poids de la mécanique.
J'ai cherché des plus forts et j'ai trouvé des 20 et 22kg, mais les dimensions ne collent pas, donc obligé de rester comme çà. Adieu tous mes rêves de bidouilles précises telles que la gravure de CI ou dessin.
Le bras est monté sur une planche qui servira de plaque d'essais, les câblages vers l'arduino sont terminés et j'ai commencé les premiers essais de programmation de mouvements. D'abord il a fallu trouver les limites de chaque déplacement en amplitude et déterminer les bonnes valeurs min et max en prog de chaque servo, j'ai bien failli exploser l'arduino avec un brusque mouvement tournant du bras au démarrage.
Première constatation, les servos de 13kg sont un peu justes en force, ils soulèvent le bras mais redescendent beaucoup trop vite emportés le poids de la mécanique.
J'ai cherché des plus forts et j'ai trouvé des 20 et 22kg, mais les dimensions ne collent pas, donc obligé de rester comme çà. Adieu tous mes rêves de bidouilles précises telles que la gravure de CI ou dessin.
#91
Francky
-

- Membres
-
- 967 messages
Membre passionné
- Gender:Male
Posté 09 décembre 2012 - 09:36
Bonjour,

En tous cas, bonne continuation
Je ne sais pas si c'est possible de ralentir la course d'un servomoteur. Cependant, pourquoi ne pas essayer de faire tourner le servo de quelques degrés, de lui dire de faire une petite pause, et de recommencer jusqu'à la position voulue ? Tu auras sûrement un mouvement saccadé mais au moins ce sera plus lent. Désolé mais sinon j'ai pas d'autres idées en tête !Première constatation, les servos de 13kg sont un peu justes en force, ils soulèvent le bras mais redescendent beaucoup trop vite emportés le poids de la mécanique.
En tous cas, bonne continuation
#92
skyhack
-
- Membres
-
- 885 messages
Membre passionné
- Gender:Male
- Location:Racourt et Flaba (08)
- Interests:Synthé, modélisation mécanique, bricolage divers, VTT enduro
Posté 09 décembre 2012 - 11:24
Une chose impérative que tu a oublié dans ton bras c'est de mettre un ressort de rappel sur les articulations où la charge est importante.
C'est comme sur les lampes de bureau (d'ailleurs tu en as une sur ton bureau qui utilise le même procédé).
En réalité c'est comme Dompi et son arachnide, les servos de 13 kg sont bien suffisant pour ce pourquoi tu les utilise, et pour les mettre en défaut il faut vraiment le faire !
Tu va devoir malheureusement revoir une partie de tes pièces afin d'intercaler ces ressort de rappel correctement dimensionnés.
skyhack.

C'est comme sur les lampes de bureau (d'ailleurs tu en as une sur ton bureau qui utilise le même procédé).
En réalité c'est comme Dompi et son arachnide, les servos de 13 kg sont bien suffisant pour ce pourquoi tu les utilise, et pour les mettre en défaut il faut vraiment le faire !
Tu va devoir malheureusement revoir une partie de tes pièces afin d'intercaler ces ressort de rappel correctement dimensionnés.
skyhack.
" Monsters are real. Ghosts are real too.
They live inside us and sometimes they win."
-------------Stephen King.------------------
" le fait que les extraterrestres étaient amis avec les Mayas ne signifie pas qu'ils sont nos amis ... "
-------------------------------------Stephen Hawking----------------------------------------------------
They live inside us and sometimes they win."
-------------Stephen King.------------------
" le fait que les extraterrestres étaient amis avec les Mayas ne signifie pas qu'ils sont nos amis ... "
-------------------------------------Stephen Hawking----------------------------------------------------
#94
F6FCO
-
- Membres
-
- 186 messages
Membre occasionnel
Posté 15 décembre 2012 - 11:18
J'ai fais la modif des ressorts un peu la mort dans l'âme parce que dans l'idée que je me fais d'un bras robot il n'y a pas de ressorts (c'est du moins ce que m'a dit Schwarzy). Mais final ça ne fait pas trop moche, les deux ressorts sont noyés dans la masse de câbles à l'arrière.
Pour la brusquerie des mouvements j'ai codé des fonctions pour les ralentir, juste une variable à passer en paramètres pour choisir la vitesse.
Pour la brusquerie des mouvements j'ai codé des fonctions pour les ralentir, juste une variable à passer en paramètres pour choisir la vitesse.
#95
skyhack
-
- Membres
-
- 885 messages
Membre passionné
- Gender:Male
- Location:Racourt et Flaba (08)
- Interests:Synthé, modélisation mécanique, bricolage divers, VTT enduro
Posté 15 décembre 2012 - 11:27
Mais on veut des photos nous ! 

" Monsters are real. Ghosts are real too.
They live inside us and sometimes they win."
-------------Stephen King.------------------
" le fait que les extraterrestres étaient amis avec les Mayas ne signifie pas qu'ils sont nos amis ... "
-------------------------------------Stephen Hawking----------------------------------------------------
They live inside us and sometimes they win."
-------------Stephen King.------------------
" le fait que les extraterrestres étaient amis avec les Mayas ne signifie pas qu'ils sont nos amis ... "
-------------------------------------Stephen Hawking----------------------------------------------------

#98
F6FCO
-
- Membres
-
- 186 messages
Membre occasionnel
Posté 16 décembre 2012 - 10:05
Pas facile la mise au point d'un T1000.
Une photo de l'ensemble câblé. J'ai enlevé la pince pour le moment car j'ai codé des mouvements aléatoires en attendant de recevoir mes capteurs et de temps en temps il joue au marteau-piqueur sur son socle.
 j'ai d'ailleurs failli détruire l'arduino. Chaud! Il est privé de pince pour l'instant.
j'ai d'ailleurs failli détruire l'arduino. Chaud! Il est privé de pince pour l'instant.

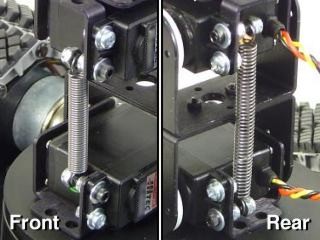
Et le système de ressorts, des petites chapes en POMC, deux ressorts de récup et un morceau de câble de vélo. Pas très beau mais facilement réglable en tension:


Une photo de l'ensemble câblé. J'ai enlevé la pince pour le moment car j'ai codé des mouvements aléatoires en attendant de recevoir mes capteurs et de temps en temps il joue au marteau-piqueur sur son socle.
j'ai d'ailleurs failli détruire l'arduino. Chaud! Il est privé de pince pour l'instant. 
Et le système de ressorts, des petites chapes en POMC, deux ressorts de récup et un morceau de câble de vélo. Pas très beau mais facilement réglable en tension:


#99
skyhack
-
- Membres
-
- 885 messages
Membre passionné
- Gender:Male
- Location:Racourt et Flaba (08)
- Interests:Synthé, modélisation mécanique, bricolage divers, VTT enduro
Posté 16 décembre 2012 - 11:29
C'est vrai que c'est pas très beau ! 

Et ça fait quelque chose au moins ces ressort, du moins quelque chose de significatifs ?
skyhack.
Et ça fait quelque chose au moins ces ressort, du moins quelque chose de significatifs ?
skyhack.
" Monsters are real. Ghosts are real too.
They live inside us and sometimes they win."
-------------Stephen King.------------------
" le fait que les extraterrestres étaient amis avec les Mayas ne signifie pas qu'ils sont nos amis ... "
-------------------------------------Stephen Hawking----------------------------------------------------
They live inside us and sometimes they win."
-------------Stephen King.------------------
" le fait que les extraterrestres étaient amis avec les Mayas ne signifie pas qu'ils sont nos amis ... "
-------------------------------------Stephen Hawking----------------------------------------------------
#100
Mike118
-

- Administrateur
-
- 10â¯326 messages
Staff Robot Maker
- Gender:Male
- Location:Anglet
- Interests:Robotique, Entrepreneuriat, Innovation, Programmation, Résolution de problème, Recherche de solutions, Mécanique, Electronique, Créer, Concevoir
Posté 16 décembre 2012 - 11:31
En tout cas rappel moi de ne jamais te donner un bout de doigt ! C'est les bras que tu me prendras ! x)
Non plus sérieusement,
Tu es partis d'un doigt et tu nous sors un bras x) !
En tout cas je dis chapeau bas.
J'espère voir de nouvelles vidéo! =)
Sur ce à bientôt !
Non plus sérieusement,
Tu es partis d'un doigt et tu nous sors un bras x) !
En tout cas je dis chapeau bas.
J'espère voir de nouvelles vidéo! =)
Sur ce à bientôt !
Si mon commentaire vous a plus laissez nous un avis ! 
Nouveau sur Robot Maker ?
Jetez un oeil aux blogs, aux tutoriels, aux ouvrages, au robotscope aux articles, à la boutique et aux différents services disponible !
En attendant qu'une bibliothèque de fichiers 3D soit mise en place n'hésitez pas à demander si vous avez besoin du fichier 3D d'un des produits de la boutique... On l'a peut être !
Si vous souhaitez un robot pilotable par internet n'hésitez pas à visiter www.vigibot.com et à lire le sous forum dédié à vigibot!
Répondre à ce sujet









1 utilisateur(s) li(sen)t ce sujet
0 members, 1 guests, 0 anonymous users




