Bonjour,
Je suis un peu embêter ^^'
Mes roues (photo plus haut) on un trous pour un axe de 1cm de diamètre, hors mon moteur à un axe de 0.5cm de diamètre...
Quelqu'un a une solution à moindre coup ?
Cdt GeekMaxou

 1 note(s)
1 note(s)
[CHAR]Autonomous Robotics Mechanics Intelligent (A.R.M.I)
Débuté par geek maxou, mars 07 2013 01:36
203 réponses à ce sujet
#121
 : message #121")
geek maxou
-
- Membres
-

- 663 messages
Membre passionné
- Gender:Male
- Location:Pas-de-Calais 62
- Interests:Monde UNIX, Développement Web, Jeux Vidéo & tout se qui touche à l'électronique
#122
Gyro49
-

- Membres
-
- 246 messages
Membre occasionnel
- Gender:Male
- Location:Angers, France
- Interests:Les nouvelles technologies
Posté 16 mars 2013 - 02:42
Bonjour,
Certaines fois, j'utilise des chevilles en plastique pour faire ce genre de bricolage.
Oui les mêmes chevilles que pour les étagères.
Bon samedi
Gyro49
Certaines fois, j'utilise des chevilles en plastique pour faire ce genre de bricolage.
Oui les mêmes chevilles que pour les étagères.
Bon samedi
Gyro49
#123
geek maxou
-
- Membres
-
- 663 messages
Membre passionné
- Gender:Male
- Location:Pas-de-Calais 62
- Interests:Monde UNIX, Développement Web, Jeux Vidéo & tout se qui touche à l'électronique
Posté 16 mars 2013 - 03:14
Merci, j'essayerais sa plus tardBonjour,
Certaines fois, j'utilise des chevilles en plastique pour faire ce genre de bricolage.
Oui les mêmes chevilles que pour les étagères.
Bon samedi
Gyro49

Je vais essayer de me mettre au coup du robot car je risque d'avoir des problèmes de fixation...
Bon samedi à toi aussi,
GeekMaxou
- geek maxou aime ceci
A.R.M.I
Autonomous Robotics Mechanics Intelligent
#124
geek maxou
-
- Membres
-
- 663 messages
Membre passionné
- Gender:Male
- Location:Pas-de-Calais 62
- Interests:Monde UNIX, Développement Web, Jeux Vidéo & tout se qui touche à l'électronique
Posté 16 mars 2013 - 04:02
Encore quelque photo pour le plaisir que j'ai à voir ma première base en alu 
(J'ai du revoir les fixations de la base)
La base finis (1er vue)
La base finis (2e vue)

Le support du coup (simple test)

Si vous avez des idées pour la réalisation et la motorisation du coup, n'hésiter pas a me le dire
Cordialement GeekMaxou
(J'ai du revoir les fixations de la base)
La base finis (1er vue)
La base finis (2e vue)
Le support du coup (simple test)
Si vous avez des idées pour la réalisation et la motorisation du coup, n'hésiter pas a me le dire
Cordialement GeekMaxou
- geek maxou aime ceci
A.R.M.I
Autonomous Robotics Mechanics Intelligent
#125
geek maxou
-
- Membres
-
- 663 messages
Membre passionné
- Gender:Male
- Location:Pas-de-Calais 62
- Interests:Monde UNIX, Développement Web, Jeux Vidéo & tout se qui touche à l'électronique
Posté 16 mars 2013 - 06:32
Le robot avance doucement mais sûrement
Les roues arrière on trouver leur place (je ne sais pas si les motrices seront a l'arrière ou à l'avant)

Le début du coup

GeekMaxou
Les roues arrière on trouver leur place
(je ne sais pas si les motrices seront a l'arrière ou à l'avant)
Le début du coup
GeekMaxou
- geek maxou aime ceci
A.R.M.I
Autonomous Robotics Mechanics Intelligent
#126
geek maxou
-
- Membres
-
- 663 messages
Membre passionné
- Gender:Male
- Location:Pas-de-Calais 62
- Interests:Monde UNIX, Développement Web, Jeux Vidéo & tout se qui touche à l'électronique
Posté 17 mars 2013 - 01:01
Bonjour,
J'ai pas mal chercher pour la fixation des roues et j'ai trouver !
J'ai tester ta technique Gyro49 mais se n'était pas fameux...
Matériel utilisé:
-chevilles molly
-tige filleté (du diamètre de la cheville)
-visserie diverse (écrous,rondelle...)
-pistoler à colle chaude
-pince pour cheville molly
J'ai tout simplement mis la cheville molly dans le trous de la roue, puis je les sertis avec la pince adapter.
J'ai r'ajouter de la colle chaude pour être sûr que sa ne bouge plus.
Au final sa tiens bien


Cdt GeekMaxou
J'ai pas mal chercher pour la fixation des roues et j'ai trouver !
J'ai tester ta technique Gyro49 mais se n'était pas fameux...
Matériel utilisé:
-chevilles molly
-tige filleté (du diamètre de la cheville)
-visserie diverse (écrous,rondelle...)
-pistoler à colle chaude
-pince pour cheville molly
J'ai tout simplement mis la cheville molly dans le trous de la roue, puis je les sertis avec la pince adapter.
J'ai r'ajouter de la colle chaude pour être sûr que sa ne bouge plus.
Au final sa tiens bien
Cdt GeekMaxou
- geek maxou aime ceci
A.R.M.I
Autonomous Robotics Mechanics Intelligent
#127
geek maxou
-
- Membres
-
- 663 messages
Membre passionné
- Gender:Male
- Location:Pas-de-Calais 62
- Interests:Monde UNIX, Développement Web, Jeux Vidéo & tout se qui touche à l'électronique
Posté 17 mars 2013 - 01:29
Quelqu'un a t-il de bonne connaissance en électronique ?
Je voudrais réaliser un contrôleur de moteur 6v 4A pour mes moteurs...
J'ai trouver ce schéma (fait par BlackTemplar)
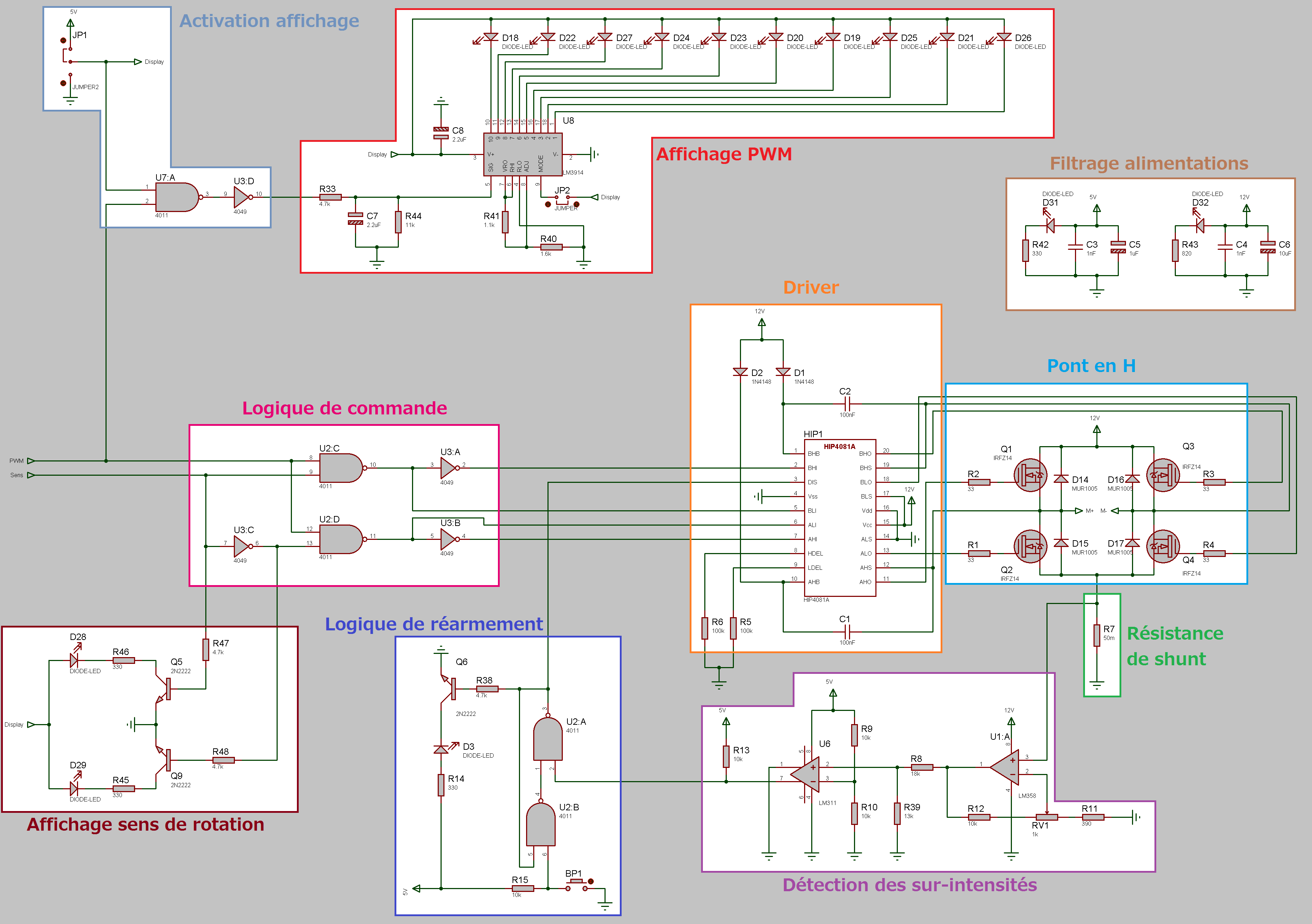
Mais je pense que pour mon niveau il est très complexe...
Quelqu'un sait comment je peut m'y prendre pour mon contrôleur ?
Cdt GeekMaxou
Je voudrais réaliser un contrôleur de moteur 6v 4A pour mes moteurs...
J'ai trouver ce schéma (fait par BlackTemplar)
Mais je pense que pour mon niveau il est très complexe...
Quelqu'un sait comment je peut m'y prendre pour mon contrôleur ?
Cdt GeekMaxou
- geek maxou aime ceci
A.R.M.I
Autonomous Robotics Mechanics Intelligent
#128
Black Templar
-

- Membres
-
- 1â¯430 messages
Membre
- Gender:Male
- Location:Lille
Posté 17 mars 2013 - 04:01
Mais je pense que pour mon niveau il est très complexe...
Quelqu'un sait comment je peut m'y prendre pour mon contrôleur ?
Les seules parties vraiment utiles sont la partie Logique de commande, Driver et Pont en H
Les parties d'affichages n'apportent rien, tu peux les virer (affichage sens rotation, activation affichage et affichage pwm)
Les parties shunt, détection sur-intensités et logique de réarmement sont des protections en cas de blocage des moteurs. C'est donc aussi facultatif.
De plus, fait attention avec ce schéma, je ne l'ai jamais testé... donc pas sur à 100% que ça marche.
Mon site internet : http://ferdinandpiette.com/
#129
geek maxou
-
- Membres
-
- 663 messages
Membre passionné
- Gender:Male
- Location:Pas-de-Calais 62
- Interests:Monde UNIX, Développement Web, Jeux Vidéo & tout se qui touche à l'électronique
Posté 17 mars 2013 - 06:02
Daccord, merci BlackTemplar
Mon Pc a quelque problème donc je risque de perdre la réalisation 3D...
Cdt GeekMaxou
Mon Pc a quelque problème donc je risque de perdre la réalisation 3D...
Cdt GeekMaxou
- geek maxou aime ceci
A.R.M.I
Autonomous Robotics Mechanics Intelligent
#130
geek maxou
-
- Membres
-
- 663 messages
Membre passionné
- Gender:Male
- Location:Pas-de-Calais 62
- Interests:Monde UNIX, Développement Web, Jeux Vidéo & tout se qui touche à l'électronique
Posté 18 mars 2013 - 12:19
Bonjour ,
Je suis en train de réfléchir pour envisager l'idée d'utiliser 4 roues motrices, je pense qu'en utilisant 4 roues motrices j'obtiendrais des déplacements plus fluide. Pouvez-vous confirmer ceci ?
Je vais sûrement mettre en place un sytème d'alerte en cas de batterie faible. Je vais mettre 2 batterie: quand l'une sera décharger le robot passe automatiquement sur la batterie de secours et va a la base de rechargement.
Si quelqu'un peut m'aiguiller sur l'alimentation automatique et les 4 roues motrices, j'en serai ravis
GeekMaxou
,Je suis en train de réfléchir pour envisager l'idée d'utiliser 4 roues motrices, je pense qu'en utilisant 4 roues motrices j'obtiendrais des déplacements plus fluide. Pouvez-vous confirmer ceci ?
Je vais sûrement mettre en place un sytème d'alerte en cas de batterie faible. Je vais mettre 2 batterie: quand l'une sera décharger le robot passe automatiquement sur la batterie de secours et va a la base de rechargement.
Si quelqu'un peut m'aiguiller sur l'alimentation automatique et les 4 roues motrices, j'en serai ravis
GeekMaxou
- geek maxou aime ceci
A.R.M.I
Autonomous Robotics Mechanics Intelligent
#131
geek maxou
-
- Membres
-
- 663 messages
Membre passionné
- Gender:Male
- Location:Pas-de-Calais 62
- Interests:Monde UNIX, Développement Web, Jeux Vidéo & tout se qui touche à l'électronique
Posté 18 mars 2013 - 06:57
Personne ?
Je voudrais aussi un peut d'aide pour la réalisation de ma carte de puissance svp ^^
Les moteurs doivent tourner dans les 2 sens. Je vais utiliser une Arduino pour faire cette tache.
Description des moteurs:
Intensité a vide 1,6 A
Intensité rendement max 10A
Je vais dans un magasin d'électronique demain après-midi donc je voudrais bien une petite liste de composant pour que je puisse les acheter.
Je ferai le schéma plus tard avec votre aide si vous êtes daccord
GeekMaxou
Je voudrais aussi un peut d'aide pour la réalisation de ma carte de puissance svp ^^
Les moteurs doivent tourner dans les 2 sens. Je vais utiliser une Arduino pour faire cette tache.
Description des moteurs:
Intensité a vide 1,6 A
Intensité rendement max 10A
Je vais dans un magasin d'électronique demain après-midi donc je voudrais bien une petite liste de composant pour que je puisse les acheter.
Je ferai le schéma plus tard avec votre aide si vous êtes daccord
GeekMaxou
- geek maxou aime ceci
A.R.M.I
Autonomous Robotics Mechanics Intelligent
#132
Microrupteurman
-

- Modérateur
-
- 2â¯210 messages
Pilier du forum
- Gender:Male
- Location:Aquitaine,Gironde
- Interests:Tout
Posté 18 mars 2013 - 07:13
Ca depend de ta configuration : si tu fait comme pour un tank, tes deplacement seront brutaux (ca depend de comment tu tourne, si tu inverse le sens de rotation des deux coté, c'est brutale, si tu eteint juste la propulsion d'un coté, c'est plus fluide, mais tourne moin court) , en revanche si tu adopte une configuration voiture, pas de souci.je pense qu'en utilisant 4 roues motrices j'obtiendrais des déplacements plus fluide. Pouvez-vous confirmer ceci ?
Un lien vers tes moteurs ?
Merci
Page Facebook : https://www.facebook...appartelier2.0/
Page Twitter : https://twitter.com/2Appartelier (bateau seulement)
Boutique Robot-Maker : https://www.robot-ma...er-20/produits/
Besoin d'une impression 3D grand format ? Contactez moi !
#133
geek maxou
-
- Membres
-
- 663 messages
Membre passionné
- Gender:Male
- Location:Pas-de-Calais 62
- Interests:Monde UNIX, Développement Web, Jeux Vidéo & tout se qui touche à l'électronique
Posté 18 mars 2013 - 07:20
Je vais utiliser 4 roues motrice, puis faire des déplacement comme un tank (je ferais des test pour savoir quelle méthode adopter: couper le moteur inverse pour tourner ou inverser le sens de rotation)Ca depend de ta configuration : si tu fait comme pour un tank, tes deplacement seront brutaux (ca depend de comment tu tourne, si tu inverse le sens de rotation des deux coté, c'est brutale, si tu eteint juste la propulsion d'un coté, c'est plus fluide, mais tourne moin court) , en revanche si tu adopte une configuration voiture, pas de souci.
Un lien vers tes moteurs ?
Merci
lien vers le moteur (je les ai déjà en ma possession et les premier test sur A.R.M.I sont assez concluant):
http://www.electronique-diffusion.fr/product_info.php?cPath=543_1121_1122&products_id=64608
Ps: tu n'a pas une idée pour la carte de puissance ? (relais, transistors...)
Cdt GeekMaxou
- geek maxou aime ceci
A.R.M.I
Autonomous Robotics Mechanics Intelligent
#134
Microrupteurman
-
- Modérateur
-
- 2â¯210 messages
Pilier du forum
- Gender:Male
- Location:Aquitaine,Gironde
- Interests:Tout
Posté 18 mars 2013 - 07:40
Ps: tu n'a pas une idée pour la carte de puissance ? (relais, transistors...)
C'est pour cela que je te demande que moteur tu as.
As oui, c'est vrai, c'est cela..... Le probleme est que comme il ne sont pas reducté, tu va avoir une enorme consomation de courant. Donc, transistor.
Page Facebook : https://www.facebook...appartelier2.0/
Page Twitter : https://twitter.com/2Appartelier (bateau seulement)
Boutique Robot-Maker : https://www.robot-ma...er-20/produits/
Besoin d'une impression 3D grand format ? Contactez moi !
#135
geek maxou
-
- Membres
-
- 663 messages
Membre passionné
- Gender:Male
- Location:Pas-de-Calais 62
- Interests:Monde UNIX, Développement Web, Jeux Vidéo & tout se qui touche à l'électronique
Posté 18 mars 2013 - 07:45
DaccordC'est pour cela que je te demande que moteur tu as.
As oui, c'est vrai, c'est cela..... Le probleme est que comme il ne sont pas reducté, tu va avoir une enorme consomation de courant. Donc, transistor.
mais quelle transistor utiliser ? pnp ou npn ? As-tu un exemple de schéma que je pourrait modifier en changeant la valeur des transistors ?
GeekMaxou
- geek maxou aime ceci
A.R.M.I
Autonomous Robotics Mechanics Intelligent
#136
Microrupteurman
-
- Modérateur
-
- 2â¯210 messages
Pilier du forum
- Gender:Male
- Location:Aquitaine,Gironde
- Interests:Tout
Posté 18 mars 2013 - 08:26
Un npn, pour la ref, je sais pas.
Regarde par la = > http://www.robot-maker.com/forum/tutorials/article/26-les-ponts-en-h/page___st__1
Regarde par la = > http://www.robot-maker.com/forum/tutorials/article/26-les-ponts-en-h/page___st__1
Page Facebook : https://www.facebook...appartelier2.0/
Page Twitter : https://twitter.com/2Appartelier (bateau seulement)
Boutique Robot-Maker : https://www.robot-ma...er-20/produits/
Besoin d'une impression 3D grand format ? Contactez moi !
#137
geek maxou
-
- Membres
-
- 663 messages
Membre passionné
- Gender:Male
- Location:Pas-de-Calais 62
- Interests:Monde UNIX, Développement Web, Jeux Vidéo & tout se qui touche à l'électronique
Posté 18 mars 2013 - 08:44
Merci,Un npn, pour la ref, je sais pas.
Regarde par la = > http://www.robot-maker.com/forum/tutorials/article/26-les-ponts-en-h/page___st__1
J'ai regarder, mais il manque une page on dirait: en bas de la dernière page il dit "maintenant nous allons voir comment réaliser un pont en H avec des transistors" mais cette page n'apparait pas.
GeekMaxou
- geek maxou aime ceci
A.R.M.I
Autonomous Robotics Mechanics Intelligent
#138
Microrupteurman
-
- Modérateur
-
- 2â¯210 messages
Pilier du forum
- Gender:Male
- Location:Aquitaine,Gironde
- Interests:Tout
Posté 18 mars 2013 - 09:10
Regarde ca alors, je vien de tomber dessus : http://arduino103.blogspot.fr/2011/06/pont-h-transistor-pour-controler-un.html
Page Facebook : https://www.facebook...appartelier2.0/
Page Twitter : https://twitter.com/2Appartelier (bateau seulement)
Boutique Robot-Maker : https://www.robot-ma...er-20/produits/
Besoin d'une impression 3D grand format ? Contactez moi !
#139
geek maxou
-
- Membres
-
- 663 messages
Membre passionné
- Gender:Male
- Location:Pas-de-Calais 62
- Interests:Monde UNIX, Développement Web, Jeux Vidéo & tout se qui touche à l'électronique
Posté 18 mars 2013 - 09:23
Merci,
Je viens de trouver sa aussi sa l'air pas mal
http://www.franciscodias.net/boards/motor-driver-board
Je vais traduire la page pour en savoir plus ^^
GeekMaxou
Je viens de trouver sa aussi sa l'air pas mal
http://www.franciscodias.net/boards/motor-driver-board
Je vais traduire la page pour en savoir plus ^^
GeekMaxou
A.R.M.I
Autonomous Robotics Mechanics Intelligent
#140
Black Templar
-
- Membres
-
- 1â¯430 messages
Membre
- Gender:Male
- Location:Lille
Posté 18 mars 2013 - 09:32
Merci,
Je viens de trouver sa aussi sa l'air pas mal
http://www.francisco...or-driver-board
Je vais traduire la page pour en savoir plus ^^
GeekMaxou
Bien, il manque juste les diodes de roues libres.
Si les transistors possèdent des diodes de roues libres intégrés ET que tes moteurs ne sont pas trop puissants (<2A?) alors pas la peine d'en rajouter, sinon, tu le dois
(les diodes de roues libres intégrés aux MOS ne sont pas de bonne qualités (ce sont des diodes parasites))
Mon site internet : http://ferdinandpiette.com/
Répondre à ce sujet









1 utilisateur(s) li(sen)t ce sujet
0 members, 1 guests, 0 anonymous users




