
Et oui je ne sais pas si sa coûtera moins cher mais au moins tu aura une première ébauche de ton châssis de bonne qualite , les soudures a froid ne seraient pas plus efficace que le scotch ?

47 réponses à ce sujet
#21

Ethan66
-

- Membres
- 111 messages
Membre
- Gender:Male
- Location:Perpignan
- Interests:Robot d'exploration et autres
Posté 08 novembre 2015 - 09:04
Au delà du possible
#22
sky99
-
- Membres
-

- 271 messages
Habitué
- Gender:Male
Posté 09 novembre 2015 - 01:26
Quand je parle de scotch, c'est souvent du proto vite fait.
Pour un vrai châssis, maintenant, j'utilise deux méthodes :
- Impression 3D;
- découpe laser.
Soit je coupe mes plaques de châssis à la laser, soit j'imprime celui ci, soit une combinaison des deux.
Pour le moment, je suis sur la conception du châssis avec OpenScad, qui me permettra de sortir un modèle à découper
à la laser (ou alors un patron a imprimer et placer sur le matériau pour une découpe manuelle, et un perçage classique),
ou un modèle 3D à imprimer.
Je garde en tête la légèreté, sauf que cette fois ci je commence à réfléchir à la protection contre les éléments.
Je pars pour le moment sur une coque extrêmement fine (0.4mm, soit la plus grosse couche que peut faire mon imprimante 3D),
avec des poutres de renfort pour la rigidité. Les panneaux plans servent à empêcher l'eau et la poussière d'entrer, et les poutres
donnent la forme et la rigidité d'ensemble.
Par rapport au précédent modèle, les moteurs sont DANS le robot plutôt que dessous, et donc protégés.
Je vais laisser un trou pour l'axe moteur, et voir comment faire un système à double lèvre pour mettre
de la graisse et faire le water-proofing.
J'essaie de faire l'ensemble en une structure unique, d'un seul tenant, une boite avec des trous ou il faut, et un couvercle
permettant de bien sceller l'intérieur.
Par rapport au précédent modèle j’essaie également de choisir des composants standards, faciles à trouver et uniformes.
Par exemple pour la batterie, je pars sur une batterie lithium de type 18650, un peu plus lourde (48-50g contre 40), mais de capacité
supérieure (2600 ou 3000 mAh pour celles dont je dispose).
De toutes façons je vais gagner énormément avec le nouveau châssis par rapport à l'ancien et la disparition de la breadboard.
Bref, quand j'aurai fini je pourrai fournir un STL pour l'imprimante 3D, avec une liste de pièces standard faciles à trouver de sorte
que ce robot soit facilement reproduisible 
Je voulais inclure un image de l'état actuel, mais je ne trouve pas comment uploader une image sur le forum...
Mon site principal : http://www.nagashur.com/ (format blog, un wiki y est aussi)
Mon profil sur hackaday.io : https://hackaday.io/sky99 (hackerspace en anglais, j'y ai plein de projets)
Mon Github : https://github.com/sarinkhan/
#23
Taupiot_Jr
-

- Membres
-
- 232 messages
Membre occasionnel
- Gender:Male
Posté 09 novembre 2015 - 10:30
Hello,
Belle idée de faire une nouvelle version de ton robot
Deux-trois questions qui me viennent en tête:
- Quelle application vises-tu avec ta volonté d’étanchéité? Ou peut-être le fais-tu par curiosité?
- Tu parles de découpe laser, est-ce que tu possèdes une table laser?
Et petite info, pour insérer une image le bouton est situé sur la 2ème ligne des raccourcis d'édition, juste entre les liens et les balises de code 
~Taupiot_Jr
#24
Ethan66
-
- Membres
- 111 messages
Membre
- Gender:Male
- Location:Perpignan
- Interests:Robot d'exploration et autres
Posté 09 novembre 2015 - 10:46
Pour l'etanchéité , je peux eventuellement te conseillé le goudron en spray , je m'en sert en réaration sur certaines toitures sinon des joints de caoutchouc a placer entre tes plaque vissées entre elles et sur les vis des joints en caoutchouc sous les rondelles en inox ( on s'en sert sur des installations solaires )
Après 0.4mm devrait être suffisant , a moins qu'il tombe des balles de golf quand il grêle chez toi , il y a peu de risque de perforation
Au delà du possible
#25
sky99
-
- Membres
-
- 271 messages
Habitué
- Gender:Male
Posté 10 novembre 2015 - 11:23
Hello,
Belle idée de faire une nouvelle version de ton robot
Deux-trois questions qui me viennent en tête:
- Quelle application vises-tu avec ta volonté d’étanchéité? Ou peut-être le fais-tu par curiosité?
- Tu parles de découpe laser, est-ce que tu possèdes une table laser?
Et petite info, pour insérer une image le bouton est situé sur la 2ème ligne des raccourcis d'édition, juste entre les liens et les balises de code
~Taupiot_Jr
Hello,
Belle idée de faire une nouvelle version de ton robot
Deux-trois questions qui me viennent en tête:
- Quelle application vises-tu avec ta volonté d’étanchéité? Ou peut-être le fais-tu par curiosité?
- Tu parles de découpe laser, est-ce que tu possèdes une table laser?
Et petite info, pour insérer une image le bouton est situé sur la 2ème ligne des raccourcis d'édition, juste entre les liens et les balises de code
~Taupiot_Jr
Salut!
Pour l'étanchéité, c'est que l'idée est de mettre un panneau solaire sur le haut du robot, et que celui ci recharge les batteries. Du coup,
il pourrait rester dehors en continu à faire quelquechose (sur le toit). Il faut donc qu'il puisse résister à la pluie
La découpe laser, j'y ai accès au fablab ou je vais Je compte me faire une CNC, par contre une laser perso c'est pas encore prévu!
Pour l'image, j'ai bien le bouton, mais il ne me propose pas de l'envoyer, uniquement de mettre un lien vers un fichier DÉJÀ sur internet.
Vous avez un bouton d'envoi vous?
Pour l'etanchéité , je peux eventuellement te conseillé le goudron en spray , je m'en sert en réaration sur certaines toitures sinon des joints de caoutchouc a placer entre tes plaque vissées entre elles et sur les vis des joints en caoutchouc sous les rondelles en inox ( on s'en sert sur des installations solaires )
Après 0.4mm devrait être suffisant , a moins qu'il tombe des balles de golf quand il grêle chez toi , il y a peu de risque de perforation
Le goudron, tu veux dire par dessus le plastique?
Pour la fermeture, je pense en effet à du joint en caouchouc. Maintenant, il doit résister à la pluie, pas forcément à l'immersion! (et l'humidité ambiante de 80% ceci dit).
Pour la grêle, ça n'est jamais arrivé chez moi, et ça ne devrait pas arriver saut changement climatique global, puisque je suis en Guadeloupe ^^
Par contre la chaleur pourrait être un problème pour la batterie, à voir!
Mon site principal : http://www.nagashur.com/ (format blog, un wiki y est aussi)
Mon profil sur hackaday.io : https://hackaday.io/sky99 (hackerspace en anglais, j'y ai plein de projets)
Mon Github : https://github.com/sarinkhan/
#26
Taupiot_Jr
-
- Membres
-
- 232 messages
Membre occasionnel
- Gender:Male
Posté 10 novembre 2015 - 01:33
Hello,
Okay. Tu comptes l'utiliser dans quel but? Récolte de données?
Bien pratique d'avoir accès à un atelier, quel qu'il soit
Oui en fait je me suis trompé, mes excuses...
Il faut aller dans "Plus d'options de réponse" et là tu peux joindre un fichier
Concernant la chaleur, cela dépend de l'exposition au soleil de l'environnement où il va évoluer.
En premier lieu j'éviterais de l'imprimer en noir ^^
Ensuite il est possible d'imaginer de placer des radiateurs sur les composants qui dégagent de la chaleur et de placer ses radiateurs sur l'extérieur de la carrosserie.
Enfin, il est tout à fait possible de définir un algorithme qui lui permette de trouver un coin frais à l'ombre ou exposé à un courant d'air. Ainsi les radiateurs présents à l'extérieurs se refroidiraient plus vite. En y réfléchissant rapidement, cela ne devrait pas demander plus qu'un capteur de luminosité et de température.
~Taupiot_Jr
#27
Ethan66
-
- Membres
- 111 messages
Membre
- Gender:Male
- Location:Perpignan
- Interests:Robot d'exploration et autres
Posté 10 novembre 2015 - 03:56
Oui , le goudron en spray existe en blanc , donc pas de soucis pour la surchauffe et exposé sur les parties neccesitant une etancheité importante
Au delà du possible
#28
ashira
-

- Modérateur
-
- 1â¯333 messages
Membre chevronné
- Gender:Male
Posté 10 novembre 2015 - 08:39
Et du silicone blanc pour les joints ca n'irait pas ?
#29
Ethan66
-
- Membres
- 111 messages
Membre
- Gender:Male
- Location:Perpignan
- Interests:Robot d'exploration et autres
Posté 10 novembre 2015 - 08:48
Si , sa pourrait aller , mais le soucis , c'est que si il doit ouvrir , le silicone comme le goudron devont etre coupé et donc refait ensuite et refaire des joints de silicone n'est pas tres agréable , même pour un plombier comme moi ^^
Je pense que des joints en caoutchouc seront plus efficace et surtout plus pratique , il ne sera pas en immersion contrairement a moi donc son etanchéité sera surtout sur les ruisellement
Le meilleur test reste la douche , une bonne douche avec son robot préféré , y'en as qui paierait pour ça !
Au delà du possible
#30
sky99
-
- Membres
-
- 271 messages
Habitué
- Gender:Male
Posté 10 novembre 2015 - 11:46
Salut!
En fait ce robot n'a pas d'utilité précise, autre que de faire un robot longue durée.
On peut dire qu'il s'agit d'une expérimentation à faire rentrer dans le projet REA.
Après, j'ai besoin de travailler sur les esp8266, donc du coup je pourrais en intégrer un, quelques capteurs,
et faire une station de mesure mobile sur le toit. Cependant, je ne sais pas trop bien ce que ça apporterait par
rapport à une station mobile, mais d'un autre côté, ça serait un peu comme un rover martien, laché sur une planète,
en milieu hostile, qui doit "faire des trucs" et se débrouiller.
L'idée serait de le mettre sur le toit longtemps (une semaine, un mois, voire plus) pour voir s'il tient bien, l'évolution de
la batterie dans le temps, etc...
Concernant la chauffe interne, je ne m’inquiète pas trop, un ATmega, quelques composants du genre, ça ne chauffe pas réellement.
Même le motor driver, vu les faibles courants, ne chauffera pas des masses.
En revanche, la batterie, plus elle chauffe, plus elle s'use vite. Donc l'idée c'est de pouvoir maintenir une température intérieure faible,
enfin protéger du puissant rayonnement solaire.
Je dis bien puissant, car ici le soleil tape fort!
Du coup pourquoi pas le radiateur, mais il faut aussi qu'il soit sous le robot, car sinon le soleil le chauffera!
Je pense que je vais surtout m'orienter vers une bonne isolation. Encore une fois l'imprimante 3D peut être la solution :
quand j'imprime un matériau, je peux définir un remplissage partiellement creux, généralement en nid d'abeilles.
Donc je peux faire plusieurs couches de plaques avec intérieur en nid d'abeilles, et ainsi on a un bon isolant thermique
L'important sera de séparer le panneau solaire du reste de la structure, car c'est lui qui absorbera la majorité des radiations solaires.
Pour le joint, en effet, je vais m'orienter vers un joint non collé. Donc un anneau en caoutchouc, mais peut être du silicone également.
En effet, si je mets une fine bande de silicone sur mon "couvercle", en face d'une zone plane, et que je ne mets pas en contact les deux pieces,
le silicone séchera, et formera un boudin élastique collé sur l'une des pièces. Après, je ferme, et je visse, ça me fera un joint à écrasement.
Mais bon, une forme adaptée peut peut être suffire à protéger de la pluie.
Pour l'algo pour aller à l'ombre, l'idée serait de le mettre à un endroit sans ombre. Donc on doit vaincre les problèmes de chaleur autrement.
Deja notre conso minimale entraine un faible rayonnement thermique, ensuite la bonne isolation, et si la batterie chauffe trop, on cessera de la recharger
le temps qu'elle refroidisse, ou éventuellement on la chargera à un taux plus bas.
Si l'ensemble chauffe trop même sans charge de la batterie, on considérera que c'est un échec de conception, et on repassera à la planche à dessins ^^
Voici la base du châssis pour le moment :
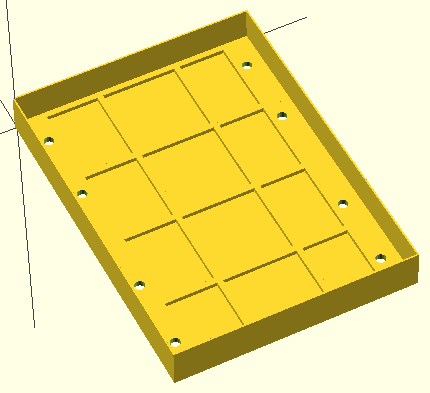
Il s'agit d'une base paramétrique (on définit les dimensions, et les élements se placent en fonction).
On peut définir l'épaisseur des parrois, les dimensions internes utiles, et ne nombre de barres de renforcement selon les axes X et Y,
ainsi que la taille de celles ci. Je n'ai pas encore mis les trous latéraux pour les axes de moteurs. Ici il s'agit d'une version utilisant la petite
chenille pololu (22T) qui fait moins de 10cm de long. Cela nous donnera une meilleure mobilité qu'avec une roue omnidirectionnelle, au détriment d'un poids supérieur.
Mais quand j'aurai fini je mettrai les schémas pour les deux : roulette + 2 roues motrices ou alors chenilles.
De toutes façons l'ensemble sera disponible sur un github, avec les sources openscad pour les modifier et adapter, et les
stl à imprimer, les dxf à découper, selon le choix effectué.
Après il manque encore plein de choses (couvercle, trous de vis, rainure du joint, etc etc). Pour l'instant j'ai utilisé ce système pour faire une boite à batterie pour un autre projet solaire, et ça fonctionne. J'ai pu tester des méthodes d'assemblage, mais pas encore le waterproofing.
Mais j'ai appris quelquechose : je ne peux pas faire des parois de 0.4mm, car mon slicer ne génère pas ces éléments lors de la génération des commandes de l'imprimante 3D. Je pense que l'imprimante peut imprimer plus fin (normalement la résolution est de 0.1mm), mais le logiciel ne le permet pas.
J'ai donc du monter jusqu'à 0.6 ou 0.7. Les parois son toujours souples (d'ou les renforts), mais l'ensemble reste léger.
En fait, c'est un projet qui était en pause, mais comme ça intéresse des gens, ça m'a donné envie de reprendre un peu ^^
Bref, je vais faire quelques prototypes, quelques itérations, et je mettrai les avancées à chaque fois
Mon site principal : http://www.nagashur.com/ (format blog, un wiki y est aussi)
Mon profil sur hackaday.io : https://hackaday.io/sky99 (hackerspace en anglais, j'y ai plein de projets)
Mon Github : https://github.com/sarinkhan/
#31
Taupiot_Jr
-
- Membres
-
- 232 messages
Membre occasionnel
- Gender:Male
Posté 11 novembre 2015 - 09:25
Hello,
Okay, une plateforme de tests divers et variés en fait
Sinon pour la chauffe je viens de penser à quelque chose, je ne sais pas si c'est utilisable mais ça m'a occupé l'esprit un moment. On pourrait imaginer une structure en deux parties.
Je m'explique, la 1ère servirait à contenir l'électronique et tous les composants. Ce serait le bloc étanche à maintenir à une température acceptable.
La 2ème serait une coque qui envelopperait la 1ère avec un espace entre les 2. Ainsi la coque absorbe le rayonnement direct et évite au boitier de surchauffer.
Peut-être qu'en développant une forme particulière on arrive à améliorer le flux d'air entre les deux et le mettre à profit?
L'avantage que j'y vois est que sur la partie extérieure on peut sans autre y placer le panneau solaire puisqu’à cet endroit l’absorption thermique n'est pas un problème.
Pour les joints d’étanchéité je partirais sur des O-Rings, dont les valeurs standards sont très variées, et que, s'il te faut une longueur spécifique, tu trouves également en rouleau. Il suffit alors de couper la bonne longueur et de le ra-pondre avec une colle adaptée.
Si besoin je peux t'imager ce à quoi je pense
~Taupiot_Jr
#32
Ethan66
-
- Membres
- 111 messages
Membre
- Gender:Male
- Location:Perpignan
- Interests:Robot d'exploration et autres
Posté 11 novembre 2015 - 10:48
Pour revenir sur l'étancheité , attention a la cappilarité et a l'humidité en interne de ton robot , si les joints sont insuffisants , de l'humidité envahira le coeur de ton engin et je crains qu'il ne survive pas a cela
Autre chose , chez toi , il y a du vent ?! Si oui , tu va devoir lui trouver un endroit abriter car un vol du haut du toit risque de lui être fatal ! Je vis dans le sud de la France et les journées a 100-120 km/h de vent ne sont pas rares
Au delà du possible
#33
sky99
-
- Membres
-
- 271 messages
Habitué
- Gender:Male
Posté 11 novembre 2015 - 04:37
Hello,
Okay, une plateforme de tests divers et variés en fait
Sinon pour la chauffe je viens de penser à quelque chose, je ne sais pas si c'est utilisable mais ça m'a occupé l'esprit un moment. On pourrait imaginer une structure en deux parties.
Je m'explique, la 1ère servirait à contenir l'électronique et tous les composants. Ce serait le bloc étanche à maintenir à une température acceptable.
La 2ème serait une coque qui envelopperait la 1ère avec un espace entre les 2. Ainsi la coque absorbe le rayonnement direct et évite au boitier de surchauffer.
Peut-être qu'en développant une forme particulière on arrive à améliorer le flux d'air entre les deux et le mettre à profit?
L'avantage que j'y vois est que sur la partie extérieure on peut sans autre y placer le panneau solaire puisqu’à cet endroit l’absorption thermique n'est pas un problème.
Pour les joints d’étanchéité je partirais sur des O-Rings, dont les valeurs standards sont très variées, et que, s'il te faut une longueur spécifique, tu trouves également en rouleau. Il suffit alors de couper la bonne longueur et de le ra-pondre avec une colle adaptée.
Si besoin je peux t'imager ce à quoi je pense
~Taupiot_Jr
Si je comprends bien, tu parlerais de faire carrément une séparation par une couche d'air?
du genre :
-------------------(paneau)
-------------------(plaque)
(air)
-------------------(plaque)
-------------------(electronique)
C'est une bonne idée en effet!
Car du coup, par rapport à mon idée de structure en nid d'abeille, on utilise surtout de l'air,
donc réduction du poids...
Pour revenir sur l'étancheité , attention a la cappilarité et a l'humidité en interne de ton robot , si les joints sont insuffisants , de l'humidité envahira le coeur de ton engin et je crains qu'il ne survive pas a cela
Autre chose , chez toi , il y a du vent ?! Si oui , tu va devoir lui trouver un endroit abriter car un vol du haut du toit risque de lui être fatal ! Je vis dans le sud de la France et les journées a 100-120 km/h de vent ne sont pas rares
L'humidité interne devrait être celle de l'endroit ou a été assemblé le robot au départ, sauf ouverture béante je pense!
Pour le vent, en effet il peut y avoir des cyclones, mais bon, dans ce cas je virerai le robot 
Apres le risque de chute est faible je pense. En effet, le robot serait très plat , bien plus large que haut. De plus j'ai une zone de toit en béton bordée par un petit muret de 15cm. Autour de cette zone il y a du toit en tôle, du coup, il peut difficilement passer le muret, et dans ce cas, il reste une grande surface de toit!
Mais bon au pire c'est pour l'instant un robot pas cher (20-30€), donc si il lui arrive quelquechose en mission, c'est pas trop grave, on aura appris quelque chose
Et du coup vous me faites penser à deux choses :
Comme charge utile, le robot pourrait emporter :
- une/des sondes précises de température (DS18B20), peut être a divers endroits (interne, externe, batterie, panneau solaire);
- un ou deux DHT22 pour mesurer l'hygrométrie (interne, et si on en met un second, externe);
- un capteur d'ensoleillement;
- ce n'est pas un capteur mais on mesurera la tension du panneau solaire et de la batterie;
- un module RTC pour avoir une idée de l'heure, et du coup savoir quand on été faites les mesures.
Avec tout ça nous pourrions avoir des statistiques sur l'environnement de la mission.
Du coup il faudrait soit intégrer le esp8266 (solution préférée, à mon avis), soit intégrer un lecteur SD pour sauvegarder les données.
Dans le second cas, c'est le plus simple, et peut être moins consommateur en énergie.
Dans le second cas, ça nous permet davantage d'interactions avec le robot, et d'avoir les données en temps réel.
Du coup il serait possible de mettre en place une mini page web, une base de donnée SQL avec les données, et de faire des graphes
(je dispose pour cela de ressources web disponibles, avec un .com, 100go d'espace et plusieurs bases sql).
Qu'en pensez vous? vous voyez des capteurs à intégrer? il faut qu'ils soient compacts, et pas trop consommateurs (à moins
qu'on décide de couper leur alimentation quand on ne s'en sert pas, et de limiter les mesures?)
Le second point auquel je pense, c'est qu'il serait possible de faire des prototypes non mobiles (juste un arduino nano , une petite batterie et un petit panneau, avec les capteurs nécessaires)
pour tester certains concepts. Par exemple, l'isolation thermique par telle ou telle méthode, l'isolation contre l'humidité, etc...
On peut même tester l'étanchéité avec un proto vide, et rempli de riz ou semoule par exemple, si le tout est sec c'est que l'eau ne rentre pas, et la on peut faire le test de la douche par exemple.
Mon site principal : http://www.nagashur.com/ (format blog, un wiki y est aussi)
Mon profil sur hackaday.io : https://hackaday.io/sky99 (hackerspace en anglais, j'y ai plein de projets)
Mon Github : https://github.com/sarinkhan/
#34
Taupiot_Jr
-
- Membres
-
- 232 messages
Membre occasionnel
- Gender:Male
Posté 11 novembre 2015 - 05:02
Hello,
Oui c'est exactement ce à quoi je pense, ravi que ça te plaise ^^
Concernant les capteurs tes idées me paraissent plutôt complètes à un détail près.
La question du déplacement du robot n'a pas été évoquée me semble-t-il. Du coup il faudrait prendre en compte les éventuels capteurs nécessaires au déplacement/positionnement sur ton toit (genre infrarouges, ultrasons, etc..)
L'idée de la base de données Web est une très bonne chose!
Concernant la gestion énergétique j'imagine quelque chose comme des mesures ponctuelles à une fréquence répondant au besoin que tu fixes. Entre deux mon avis penche sur la désactivation totale des systèmes de mesures en incluant aussi la coupure des ADC et autres périphériques internes du uC.
En intégrant un RTC il est pleinement imaginable de réveiller le robot une fois toutes les X minutes/heures/... pour lui faire effectuer ses actions avant de le rendormir.
Le coup de tester les éléments sur des bases non-mobiles peuvent être intéressantes, tu t'affranchis ainsi des contraintes physiques gênantes durant le développement.
Je suis sûr que d'autres auront aussi des idées qui pourront compléter celles déjà sur le tapis
~Taupiot_Jr
#35
sky99
-
- Membres
-
- 271 messages
Habitué
- Gender:Male
Posté 11 novembre 2015 - 08:54
Hello,
Oui c'est exactement ce à quoi je pense, ravi que ça te plaise ^^
Concernant les capteurs tes idées me paraissent plutôt complètes à un détail près.
La question du déplacement du robot n'a pas été évoquée me semble-t-il. Du coup il faudrait prendre en compte les éventuels capteurs nécessaires au déplacement/positionnement sur ton toit (genre infrarouges, ultrasons, etc..)
L'idée de la base de données Web est une très bonne chose!
Concernant la gestion énergétique j'imagine quelque chose comme des mesures ponctuelles à une fréquence répondant au besoin que tu fixes. Entre deux mon avis penche sur la désactivation totale des systèmes de mesures en incluant aussi la coupure des ADC et autres périphériques internes du uC.
En intégrant un RTC il est pleinement imaginable de réveiller le robot une fois toutes les X minutes/heures/... pour lui faire effectuer ses actions avant de le rendormir.
Le coup de tester les éléments sur des bases non-mobiles peuvent être intéressantes, tu t'affranchis ainsi des contraintes physiques gênantes durant le développement.
Je suis sûr que d'autres auront aussi des idées qui pourront compléter celles déjà sur le tapis
~Taupiot_Jr
En fait j'y ai pensé, mais j'étais réticent à ajouter des capteurs IR de rotation sur les roues, du fait de leur conso importante (15-30mA chaque). D'un autre côté,
on peut les alimenter uniquement en déplacement...
Pour la position absolue du robot, en effet, rien n'est prévu. La zone d'opération est un rectangle de quelques mètres de côté, et le robot ne peut pas en sortir.
Du coup sa position n'est pas très importante.
Pour qu'il ne se cogne pas dans les murs, un capteur de distance IR ferait l'affaire. Puisque c'est de l'optique, la seule chose qui a besoin de "dépasser"
du châssis, ce sont les optiques. Du coup on peut "waterproofer" le capteur...
Pour la conso, on a 40mA pour les moteurs en fonctionnement, et pour le reste nous pouvons sans doute tabler sur 20mA en étant large, hors capteurs.
Du coup en surveillant la conso des capteurs, on peut utiliser l'ensemble sans s'inquiéter outre mesure de la conso du robot lui même!
Les références sont ici : http://www.robot-maker.com/forum/topic/8801-mini-robot-tres-compact-et-autonomie-tres-importante/?p=57279
Ce sont des tests effectués sur l'ancienne version du robot.
Du coup avec une batterie de 2000mAh en 3.7V on a 7400mWh d'autonomie, et la conso au repos est de 20*5=100mW au repos, et 60*5=300mW en mouvement.
Du coup on peut tabler sur 7400/100=74h d'autonomie au repos, et 7400/300=24h d'autonomie en déplacement continu!
Le paneau solaire prévu fait 180mA en 5V, soit 900mW, donc on peut à la fois recharger la batterie ET alimenter le robot, et on a largement de quoi tenir les nuits.
Du coup on a normalement de quoi soutenir une longue mission, limitée à priori par l'usure de la batterie!
De fait, s'il est possible d'utiliser les modes basse énergie du ATmega, ce n'est pas forcément nécessaire, à moins de faire un modèle plus compact, avec un budget énergétique plus faible, et un panneau solaire plus petit!
Mon site principal : http://www.nagashur.com/ (format blog, un wiki y est aussi)
Mon profil sur hackaday.io : https://hackaday.io/sky99 (hackerspace en anglais, j'y ai plein de projets)
Mon Github : https://github.com/sarinkhan/
#36
Microrupteurman
-

- Modérateur
-
- 2â¯210 messages
Pilier du forum
- Gender:Male
- Location:Aquitaine,Gironde
- Interests:Tout
Posté 11 novembre 2015 - 10:34
Pour ton panneau solaire, prend large, on atteint jamais les specs sur la fiche produit.
Page Facebook : https://www.facebook...appartelier2.0/
Page Twitter : https://twitter.com/2Appartelier (bateau seulement)
Boutique Robot-Maker : https://www.robot-ma...er-20/produits/
Besoin d'une impression 3D grand format ? Contactez moi !
#37
sky99
-
- Membres
-
- 271 messages
Habitué
- Gender:Male
Posté 12 novembre 2015 - 03:04
Pour ton panneau solaire, prend large, on atteint jamais les specs sur la fiche produit.
Pour le moment, le panneau solaire produit théoriquement le triple de la conso en mouvement, et environ 10 fois la conso au repos, donc ça devrait aller
Mais à la limite, si des problèmes surviennent, c'est plus intéréssant que si tout fonctionne sur des roulettes du premier coup ^^
Mon site principal : http://www.nagashur.com/ (format blog, un wiki y est aussi)
Mon profil sur hackaday.io : https://hackaday.io/sky99 (hackerspace en anglais, j'y ai plein de projets)
Mon Github : https://github.com/sarinkhan/
#38
Taupiot_Jr
-
- Membres
-
- 232 messages
Membre occasionnel
- Gender:Male
Posté 12 novembre 2015 - 08:34
Hello,
Pour les capteur de rotations des roues, tu peux les remplacer par des contacts Reed. Tu peux ainsi réduire la consommation de façon significative je pense.
Donc en fait le but n'est pas de lui faire effectuer des mesures à un lieu précis, juste qu'il déambule sur ton toit sans tomber en panne sèche. Dans ce cas, tu peux en effet limiter aux capteurs de collision. Tu pourrais carrément lui mettre des microswitches à la place des IR et ainsi économiser encore un peu d'énergie. Entre les deux options je ne sais pas laquelle est la plus simple à étanchéifier par contre..
Concernant les modes de basse consommation, ils sont simples à appliquer et permettent d'économiser beaucoup d'énergie. Même si tu n'en a pas besoin fondamentalement, cela reste intéressant dans la mesure où cela t'ouvres d'autres possibilités d'optimisations ou de mesures, ...
Pour le panneau tu pourrais faire une mesure sur plusieurs jours avec un petit circuit simple qui ferait office de datalogger et ainsi estimer l'énergie qui sera disponible. Enfin bon, plein d'idées mais pas forcément le temps ^^
~Taupiot_Jr
#39
sky99
-
- Membres
-
- 271 messages
Habitué
- Gender:Male
Posté 12 novembre 2015 - 04:46
Salut!
Effectivement on peut baisser de beaucoup la conso, j'en avais même fait un résumé ici : http://www.robot-maker.com/forum/blog/45/entry-41-tout-ce-que-vous-pourriez-vous-demander-sur-la-consommation-dune-puce-atmega328p-puce-darduino/
(basé sur un super article de nick gammon)
Pour les microswitches, j'en ai, je pense que ça peut passer sans trop de soucis, ils ont une sorte de coque en plastique. En cas d'immersion, on risque de détecter un appui sur le switch si l'eau fait contact, mais vu la forme, il faudrait réellement le plonger dans l'eau à mon avis. S'il est simplement protégé de la pluie ça devrait aller.
Je pense que je mettrai quand même le capteur IR de distance, car j'en ai un sous la main.
Pour les capteurs de rotation magnétique, j'ai des capteurs hall, et des petits aimants neodyme. Par contre je n'ai pas (ou un seul) capteur reed; par ailleurs j'ignore totalement l'intérêt de l'un par rapport à l'autre?
Pour la mesure de l'énergie fournie par le panneau, j'ai un problème : mesurer la tension est simple, mais en revanche, pour mesurer l'intensité electrique, je n'ai rien.
J'ai quelques capteurs, mais qui sont faits pour des intensités supérieures (1-5A) avec une précision faible!
Du coup si quelqu'un connait des circuits pour mesurer des courants faibles (disons aux alentours de 100mA), je suis preneur.
Idéalement il faudrait de quoi mesurer de petites consos (genre quelques mA, disons 10-50mA , avec une bonne précision genre + ou - 1mA), et aussi
un peu plus, disons 50-250 avec si nécéssaire une moins bonne précision (on peut tomber à +/- 10mA par ex).
Dans ce domaine, j'ai du mal à trouver des composants, et je ne sais pas trop ou commencer.
En effet, si on peut mesurer la conso du robot, et l'énergie fournie par le panneau, on peut avoir une estimation tres précise de la charge restante et de l'autonomie.
Mon site principal : http://www.nagashur.com/ (format blog, un wiki y est aussi)
Mon profil sur hackaday.io : https://hackaday.io/sky99 (hackerspace en anglais, j'y ai plein de projets)
Mon Github : https://github.com/sarinkhan/
#40
Taupiot_Jr
-
- Membres
-
- 232 messages
Membre occasionnel
- Gender:Male
Posté 12 novembre 2015 - 05:54
Hello,
En effet, je me souviens avoir lu ton post
L'avantage si tu places un capteur IR c'est que tu peux anticiper l'obstacle et changer de direction sans devoir arrêter et relancer les moteurs. Bon, je crois que je commence à pinailler, mais dans l'idée.. ^^
L'intérêt du contact Reed est qu'il ne consomme pas d'énergie lorsequ'il est ouvert.
Pour mesurer l'énergie, je vais voir ce que je peux trouver et je te redis
D'ici là, bon travail!
~Taupiot_Jr








0 utilisateur(s) li(sen)t ce sujet
0 members, 0 guests, 0 anonymous users

