

Bien, plus propre, on voit mieux ou va ou ect.
Tu fais comme tu veux, moi j'essayerais a ta place.

74 réponses à ce sujet
#23

JFDuval
-

- Membres
- 36 messages
Nouveau membre
- Location:Québec!
Posté 10 juin 2005 - 09:54
Hello!
Toto629, j'ai de la misère à comprendre quelque chose. Dans ton premeir post tu dis:
Et après tu dis que c'est le schéma de LittleB. Tu voulais dire circuit intégré plutot que microcontroleur? Ou j'ai manqué un bout...
Toto629, j'ai de la misère à comprendre quelque chose. Dans ton premeir post tu dis:
Voilà j'ai fais un robot avec deux photodiode, un coupleur de piles, un microcntroleur, deux moteur à courant continue ect... enfin bref...
Et après tu dis que c'est le schéma de LittleB. Tu voulais dire circuit intégré plutot que microcontroleur? Ou j'ai manqué un bout...
#25
Mindiell
-

- Membres
-

- 408 messages
Habitué
- Location:France
Posté 11 juin 2005 - 06:41
Je t'avoue qu'en tant que débutant moi même, j'avais pa sfait gaffe a la différence... Ca reste un boitier noir avec plus de 3 pattesHello!
Et après tu dis que c'est le schéma de LittleB. Tu voulais dire circuit intégré plutot que microcontroleur? Ou j'ai manqué un bout...

#26
Alain Gélinas
-

- Membres
- 16 messages
Nouveau membre
Posté 13 juin 2005 - 09:42
je sais que le schema de little B est pas bon j'ai gafouillé dans photoshop., et ca fait plusieur fois que je l'indique ici dans le faq. penez le shema "d'Apache II" c'est tout. et ca fonctionne tres tres tres tres tres bien 
pour le look du robot, a vous de choisir, j'ai pas de plan et j'inprovise. un pistolet a cole chaude ou de la colle forte ca tien tres bien le tout en place.
pour le look du robot, a vous de choisir, j'ai pas de plan et j'inprovise. un pistolet a cole chaude ou de la colle forte ca tien tres bien le tout en place.

#30
toto629
-
- Membres
- 81 messages
Membre
Posté 18 juin 2005 - 01:45
Et trois dernières petites questions, je voudrais mettre une caméra au devant du robot. Comment puis-je faire pour avoir la vidéo sur mon ordinateur ? Est-ce que une caméra d'une webcam pourrait fonctionner avec ce que je voudrais faire ? Comment faire pour le télécomander avec une télécomande TV ?
P.S: Je n'ai aucun élément pour l'instant ( à part la télécommande ), j'attends que j'ai des information pour les achetés.
P.S: Je n'ai aucun élément pour l'instant ( à part la télécommande ), j'attends que j'ai des information pour les achetés.

#32
GuillaumeD
-

- Membres
-
- 141 messages
Membre occasionnel
Posté 19 juin 2005 - 02:25
Salut,
Si tu veut mettre une petite caméra, il faut surtout voir si ton robot peut la porter et se déplacer avec ça sur le dos ! Si tu as mis des petits poteurs de pager; comme Alain Gélinas, je pense que ça ne marchera pas, à moins de réducter avec des engrenages. Tu auras des roues qui tournent moins vite mais avec plus de couple, donc ça revient un peu à avoir plus de puissance à la roue. Là tu pourras avancer.
Maintenant il y a le problème de transmission des données, il faut une caméra dotée d'un module émetteur (et un récepteur pour capter l'image ça va de soi).
Sinon tu peux utuliser une webcam, mais il y aura un câble, ce sera peut-être pas top
Si tu veut mettre une petite caméra, il faut surtout voir si ton robot peut la porter et se déplacer avec ça sur le dos ! Si tu as mis des petits poteurs de pager; comme Alain Gélinas, je pense que ça ne marchera pas, à moins de réducter avec des engrenages. Tu auras des roues qui tournent moins vite mais avec plus de couple, donc ça revient un peu à avoir plus de puissance à la roue. Là tu pourras avancer.
Maintenant il y a le problème de transmission des données, il faut une caméra dotée d'un module émetteur (et un récepteur pour capter l'image ça va de soi).
Sinon tu peux utuliser une webcam, mais il y aura un câble, ce sera peut-être pas top
#34
GuillaumeD
-
- Membres
-
- 141 messages
Membre occasionnel
Posté 19 juin 2005 - 09:42
Waow, là c'est une autre paire de manches !
Déjà, les télécommandes, suivant le fabricant (et le modèle), émettent des ondes infra-rouge (I-R). Il faut donc un récepteur I-R qui capte et traduit les signaux I-R en information électrique, chaque bouton pressé sur la commande envoyant une onde sur une certaine fréquence.
A partir de là, ça marche comme avec une radio-commande hertzienne hautes fréquences (les radios de modélisme par exemple).
Avec une commande I-R tu as une portée beaucoup plus faible qu'avec les radio-commandes HF, environ 10 à 15 mètres pour une I-R et 300 mètres pour une radio H-F.
Mais ce n'est pas impossible.
Il y a didel qui fait des commandes I-R par exemple. Comme ça tu verras de quoi il retourne (par contre -> $$$ ! )
A+
Déjà, les télécommandes, suivant le fabricant (et le modèle), émettent des ondes infra-rouge (I-R). Il faut donc un récepteur I-R qui capte et traduit les signaux I-R en information électrique, chaque bouton pressé sur la commande envoyant une onde sur une certaine fréquence.
A partir de là, ça marche comme avec une radio-commande hertzienne hautes fréquences (les radios de modélisme par exemple).
Avec une commande I-R tu as une portée beaucoup plus faible qu'avec les radio-commandes HF, environ 10 à 15 mètres pour une I-R et 300 mètres pour une radio H-F.
Mais ce n'est pas impossible.
Il y a didel qui fait des commandes I-R par exemple. Comme ça tu verras de quoi il retourne (par contre -> $$$ ! )
A+
#35
GuillaumeD
-
- Membres
-
- 141 messages
Membre occasionnel
Posté 19 juin 2005 - 09:53
Je ne comprends pas bien ce schéma
Ca utilise le 555, c'est pas mal le même on dirait, mais en plus chalant
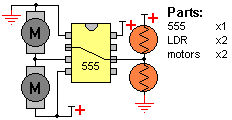
Comment sont reliées les deux LDR ? Elles sont polarisées ou pas ? Ou elles sont en dérivation ?
Idem pour les moteurs

Là je ne vois pas... Personnellement, le schéma du little-B de Alain Gélinas m'était plus parlant

#37
toto629
-
- Membres
- 81 messages
Membre
Posté 20 juin 2005 - 07:25
comment cela se fait-il alors qui suit pas la lumière, il fonse et boom dans le mur !!! Qui pourrait me faire un shéma pour au moins qu'il marche? car apache II utilise les résistances .... et sur ce shéma là il n'y en na pas c'est donc pour sa que je ne fait pas ce circuit .
#38
GuillaumeD
-
- Membres
-
- 141 messages
Membre occasionnel
Posté 20 juin 2005 - 08:28
Ah oui, le schéma que j'ai cité est le même que celui du Little-B !alain gélinas dit tout le temps qu'il faut prendre le shéma de apache II.
 Je viens juste de m'en apercevoir
Je viens juste de m'en apercevoir Bon ben je laisse tomber alors, oubliez ma question précédente

Merci toto629.
Répondre à ce sujet









0 utilisateur(s) li(sen)t ce sujet
0 members, 0 guests, 0 anonymous users





{kind=link}