


74 réponses à ce sujet
#43

GuillaumeD
-

- Membres
-

- 141 messages
Membre occasionnel
Posté 20 juin 2005 - 04:04
Bonne question...
Il fonce dans les murs tu dis ? Il y a des chances pour que quand il y a un mur, il y ait de l'ombre... donc il ne va pas vers la lumière mais vers le noir peut-être. Est-ce que c'est ca ?
Si oui, alors j'ai peut-être une solution.
Prenons un exemple: le robot est éclairé par sa droite, alors il faut que le moteur du côté gauche tourne (pour faire avancer le robot), comme ça le robot tourne vers la droite et se dirige vers la lumière.
Si, à la place, c'est l'autre moteur qui tourne, alors probablement qu'ils ont été montés à l'envers ? Ou peut-être que tu as tout simplement inversé les branchements ?
Il nous faudrait plus de détails: quel est le moteur qui tourne ? Dans quel sens ? Est-ce que les deux moteurs tournent ? Dans quel sens chacun ? Est-ce que le robot fuit la lumière ?
Il fonce dans les murs tu dis ? Il y a des chances pour que quand il y a un mur, il y ait de l'ombre... donc il ne va pas vers la lumière mais vers le noir peut-être. Est-ce que c'est ca ?
Si oui, alors j'ai peut-être une solution.
Prenons un exemple: le robot est éclairé par sa droite, alors il faut que le moteur du côté gauche tourne (pour faire avancer le robot), comme ça le robot tourne vers la droite et se dirige vers la lumière.
Si, à la place, c'est l'autre moteur qui tourne, alors probablement qu'ils ont été montés à l'envers ? Ou peut-être que tu as tout simplement inversé les branchements ?
Il nous faudrait plus de détails: quel est le moteur qui tourne ? Dans quel sens ? Est-ce que les deux moteurs tournent ? Dans quel sens chacun ? Est-ce que le robot fuit la lumière ?
#44
toto629
-
- Membres
- 81 messages
Membre
Posté 20 juin 2005 - 04:28
enfin il fonce pas dans les mur mais quand il y en n'a un devant lui ben ... Il tourne tous les deux tout droit même quand il y a de la lumière a gauche ou a droite. ils otournent tous les deux dans le sens d'une aiguille d'une montre. ben il fonce !! ( sa fait comme si il y avait que des moteurs sans rien !
mais je vais quand même essayer dd'inverser les deux moteur pour voir qu'est-ce qu'il fait.
mais je vais quand même essayer dd'inverser les deux moteur pour voir qu'est-ce qu'il fait.
#47
Lawsuit
-

- Membres
- 102 messages
Membre
- Location:Riki
Posté 21 juin 2005 - 03:54
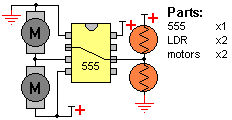
Les capteurs de lumière utilisé sur le shémas sont des photorésistances, donc non polariser. Pour les moteurs, surement qu'ils doivent l'être, mais c'est plutot en testant que tu veras quel sens les branchez. Sinon, partout ou tu as le gros + c'est le positif, et les quelques barre superposé c'est le négatifJe ne comprends pas bien ce schéma
Ca utilise le 555, c'est pas mal le même on dirait, mais en plus chalant
Comment sont reliées les deux LDR ? Elles sont polarisées ou pas ? Ou elles sont en dérivation ?
Idem pour les moteurs
Là je ne vois pas... Personnellement, le schéma du little-B de Alain Gélinas m'était plus parlant
#53
Fabarbuck
-

- Membres
-
- 685 messages
Membre passionné
Posté 21 juin 2005 - 06:01
La tout de suite j'ai la flemme de regarder le détail, mais à vue de nez, les deux photorésistances forment un pont diviseur de tension (ie selon l'éclairement de l'une et l'autre, la tension du point milieu va varier.. cf des cours sur le pont diviseur pour capter).
Pour les moteurs, c'est un peu le meme principe... a priori, si la tension du point entre les deux moteurs est un coup 0v un coup Vcc, bah soit le moteur bas tourne, soit c'est l'autre... ensuite, si on a signal créneau 0/vcc avec 50% du temps en bas et 50% du temps en haut, les deux moteurs tournent à la meme vitesse... avec 25/75, bah... vitesse 25% et 75%.... vous suivez?
Tout ca pour dire que dans cette configuration, le robot ne fait qu'avancer... donc... s'il ne tourne pas, c'est que on s'éloigne trop peu de 50/50, donc... (puisque d'une facon ou d'une autre, ce rapport doit etre piloté par la tension obtenue entre les deux LDR...... en toute logique.... à vue de nez comme ca... ) donc que la tension entre les LDR ne varie pas assez... donc... que la sensibilité n'est pas assez bonne.....? c'est une supposition bete et méchante sans meme réfléchir sur le vrai montage....
Perso, je mettrai le robot sur un support (pour que les roues ne touchent pas le sol) et je testerai en éclairant avec une lampe torche une des LDR et mettant dans l'obscurité l'autre, pour voir ce qui se passe, et inversement. Si cela ne fontionne pas mieux comme ca, bah... je sortirais la datasheet du NE555 pour tenter de voir dans quel mode de fonctionnement il est utilisé pour vérifier que j'ai bien capté... et tenter de voir ou ca peut foirer!
A priori... ca me parait pas forcément certain que le ne555 réussisse à imposer clairement vcc ou 0v entre les deux moteurs... et le soucis provient peut etre de la si les moteurs sont trop gourmands... du coup, il faudrait peut etre intercaler un montage à transistor: la sortie du ne555 pilote le transistor, qui lui se charge d'imposer 'puissamment' 0 ou vcc sur le point entre les deux moteurs... Jpense que j'essayerais de faire des mesures la dessus... (l'idéal serait à l'oscillo mais bon... au voltmetre ya ptet moyen...
Bref, ce ne sont que des pistes de faignasse parce que je veux pas refondre le schéma en entier... à vous de voir ce que vous pouvez en faire!
Pour les moteurs, c'est un peu le meme principe... a priori, si la tension du point entre les deux moteurs est un coup 0v un coup Vcc, bah soit le moteur bas tourne, soit c'est l'autre... ensuite, si on a signal créneau 0/vcc avec 50% du temps en bas et 50% du temps en haut, les deux moteurs tournent à la meme vitesse... avec 25/75, bah... vitesse 25% et 75%.... vous suivez?
Tout ca pour dire que dans cette configuration, le robot ne fait qu'avancer... donc... s'il ne tourne pas, c'est que on s'éloigne trop peu de 50/50, donc... (puisque d'une facon ou d'une autre, ce rapport doit etre piloté par la tension obtenue entre les deux LDR...... en toute logique.... à vue de nez comme ca...
) donc que la tension entre les LDR ne varie pas assez... donc... que la sensibilité n'est pas assez bonne.....? c'est une supposition bete et méchante sans meme réfléchir sur le vrai montage....Perso, je mettrai le robot sur un support (pour que les roues ne touchent pas le sol) et je testerai en éclairant avec une lampe torche une des LDR et mettant dans l'obscurité l'autre, pour voir ce qui se passe, et inversement. Si cela ne fontionne pas mieux comme ca, bah... je sortirais la datasheet du NE555 pour tenter de voir dans quel mode de fonctionnement il est utilisé pour vérifier que j'ai bien capté... et tenter de voir ou ca peut foirer!
A priori... ca me parait pas forcément certain que le ne555 réussisse à imposer clairement vcc ou 0v entre les deux moteurs... et le soucis provient peut etre de la si les moteurs sont trop gourmands... du coup, il faudrait peut etre intercaler un montage à transistor: la sortie du ne555 pilote le transistor, qui lui se charge d'imposer 'puissamment' 0 ou vcc sur le point entre les deux moteurs... Jpense que j'essayerais de faire des mesures la dessus... (l'idéal serait à l'oscillo mais bon... au voltmetre ya ptet moyen...
Bref, ce ne sont que des pistes de faignasse parce que je veux pas refondre le schéma en entier... à vous de voir ce que vous pouvez en faire!
#55
-

- Guests
Posté 22 juin 2005 - 04:32
sinon, un moteur c'est polarisé - la question a été posée plus haut.
selon le sens de branchement ca tourne dans un sens OU dans l'autre. ca peut expliquer que le machin fonce dans le mur plutot que de suivre la lumière...
sur le schémas de Little-B il serait bon de préciser MD/MG LDRD/LDRG et la polarité des moteurs, c'est peut être cela qu'il faut en guise de tutoriel et explications complémentaires.
selon le sens de branchement ca tourne dans un sens OU dans l'autre. ca peut expliquer que le machin fonce dans le mur plutot que de suivre la lumière...
sur le schémas de Little-B il serait bon de préciser MD/MG LDRD/LDRG et la polarité des moteurs, c'est peut être cela qu'il faut en guise de tutoriel et explications complémentaires.
#56
Mindiell
-

- Membres
-
- 408 messages
Habitué
- Location:France
Posté 22 juin 2005 - 04:36
Comme souvent répété ici, le schéma de Little-B est faux, il faudrait que Bernard pense à l'enlever une bonne fois pour toutessur le schémas de Little-B il serait bon de préciser MD/MG LDRD/LDRG et la polarité des moteurs, c'est peut être cela qu'il faut en guise de tutoriel et explications complémentaires.
#57
sap
-

- Membres
-
- 128 messages
Membre occasionnel
Posté 23 juin 2005 - 02:54
j'ai fini mes yeux... et j'en ai jeté un à ce montage :-)

plusieurs remarques:
- le dessin est presque bon si ce n'est qu'il manque un fil rouge entre le (+) et la broche n°5 sur ce dessin (qui est en fait la broche 8, VCC du composant)
- il faut employer un 7555 si on veut alimenter le montage avec 2 piles de 1V5 ; le NE555 a besoin d'un minimum de 4V5 pour fonctionner, la version 7555 n'a besoin que de 2V pour fonctionner ; je ne sais pas si ca peut fonctionner sous 1V5 et moins (soit une pile)...
- 3V en principe ca fait de trop pour des vibreurs de GSM
- un 555 débite 200mA maxi
- se pose le casse tête de la polarité des moteurs (leur sens de marche), de la disposition des moteurs D/G et de la disposition D/G des photodiodes ou photoresistances...
- les photodiodes aussi ont une polarité ; le plus simple est d'employer deux photoresistances (ce n'est peut être pas assez sensible à la lumière du jour ou de celle d'un séjour)
- s'il fallait un potentiometre il faudrait le caser entre les deux photodiodes et le fil bleu ; on doit pouvoir règler la bête en jouant sur l'orientation des photodiodes ou des photoresistances
- il faudrait une diode de protection (pour la longévité du 555) aux bornes de chacun des moteurs
- le mobile devrait en principe aller vers la lumière en faisant des zigzags ; un coup le moteur de droite, un coup le moteur de gauche ; selon l'inertie des moteurs qu'on va employer et la disposition des photodiodes le machin doit virer fou
faut que j'en fasse un, ca m'intrigue
plusieurs remarques:
- le dessin est presque bon si ce n'est qu'il manque un fil rouge entre le (+) et la broche n°5 sur ce dessin (qui est en fait la broche 8, VCC du composant)
- il faut employer un 7555 si on veut alimenter le montage avec 2 piles de 1V5 ; le NE555 a besoin d'un minimum de 4V5 pour fonctionner, la version 7555 n'a besoin que de 2V pour fonctionner ; je ne sais pas si ca peut fonctionner sous 1V5 et moins (soit une pile)...
- 3V en principe ca fait de trop pour des vibreurs de GSM
- un 555 débite 200mA maxi
- se pose le casse tête de la polarité des moteurs (leur sens de marche), de la disposition des moteurs D/G et de la disposition D/G des photodiodes ou photoresistances...
- les photodiodes aussi ont une polarité ; le plus simple est d'employer deux photoresistances (ce n'est peut être pas assez sensible à la lumière du jour ou de celle d'un séjour)
- s'il fallait un potentiometre il faudrait le caser entre les deux photodiodes et le fil bleu ; on doit pouvoir règler la bête en jouant sur l'orientation des photodiodes ou des photoresistances
- il faudrait une diode de protection (pour la longévité du 555) aux bornes de chacun des moteurs
- le mobile devrait en principe aller vers la lumière en faisant des zigzags ; un coup le moteur de droite, un coup le moteur de gauche ; selon l'inertie des moteurs qu'on va employer et la disposition des photodiodes le machin doit virer fou
faut que j'en fasse un, ca m'intrigue
#58
GuillaumeD
-
- Membres
-
- 141 messages
Membre occasionnel
Posté 23 juin 2005 - 09:47
Impeccable ce petit résumé, il répond à beaucoup de questions, merci !
Si je comprends bien, il faut aussi brancher tout ce qui est schématisé sur la borne 7 non pas là mais à la borne 6 (borne 6 sur le schéma, qui est la borne 7 en réalité) ?
Voici un petit schéma corrigé que j'ai fait d'après tes indications, il reste les diodes aux bornes des moteurs ?
[Schéma effacé, car toujours faux ]
]
Si je comprends bien, il faut aussi brancher tout ce qui est schématisé sur la borne 7 non pas là mais à la borne 6 (borne 6 sur le schéma, qui est la borne 7 en réalité) ?
Voici un petit schéma corrigé que j'ai fait d'après tes indications, il reste les diodes aux bornes des moteurs ?
[Schéma effacé, car toujours faux
]
#59
toto629
-
- Membres
- 81 messages
Membre
Posté 23 juin 2005 - 11:52
non c'est moi qui doit vous remercier ! je vais plutot faire le schéma là. je le fais ce soir et je vous dis quoi demain. au fait j'ai acheter le livre " PETITS ROBOTS MOBILES " de fréderique G. et en parlant d'un potentiomètre ils disent que il faut un pot. de 20K alors j'en mais un de 20K ??
merci encore, +
merci encore,
+
#60
-
- Guests
Posté 23 juin 2005 - 12:08
non, là il y a deux erreurs:
d'après les n° de broches normaux, il faut raccorder 2 (trigger) avec 6 (threshold) ; le "dessin" original etait bon, il ne manquait que le raccordement du VCC au pole (+)
si on souhaite mettre un potentiometre (au moins 470k voire 1Mo, il circule des uA dans des photodiodes), il faut le mettre entre celles ci:
(-)---->|----[ | ]---->|----(+)
les photodiodes il faut les mettre à l'envers et le point milieu du potentiometre on le raccorde à 2 et 6 du 555.
les diodes aux bornes du moteur ce serait à cause des tensions negatives ou supérieures à VCC à la broche 3.
le NE555 de base sous 3V ne doit pas avoir besoin de diodes. 3V ne doivent pas suffir pas à le détériorer (mais je ne sais pas s'il peut marcher sous 3V).
Avec le 7555 on doit pouvoir s'en passer aussi vu sa conception.
d'après les n° de broches normaux, il faut raccorder 2 (trigger) avec 6 (threshold) ; le "dessin" original etait bon, il ne manquait que le raccordement du VCC au pole (+)
si on souhaite mettre un potentiometre (au moins 470k voire 1Mo, il circule des uA dans des photodiodes), il faut le mettre entre celles ci:
(-)---->|----[ | ]---->|----(+)
les photodiodes il faut les mettre à l'envers et le point milieu du potentiometre on le raccorde à 2 et 6 du 555.
les diodes aux bornes du moteur ce serait à cause des tensions negatives ou supérieures à VCC à la broche 3.
le NE555 de base sous 3V ne doit pas avoir besoin de diodes. 3V ne doivent pas suffir pas à le détériorer (mais je ne sais pas s'il peut marcher sous 3V).
Avec le 7555 on doit pouvoir s'en passer aussi vu sa conception.
Répondre à ce sujet








0 utilisateur(s) li(sen)t ce sujet
0 members, 0 guests, 0 anonymous users





{kind=link}