
salut ...chui débutante en robotique ..svp pouvez vous m'aider concernant le choix du carte du puissance pour un robot suiveur personne ..voici mon schéma pour ma carte de puissance c'est efficace ou nn

11 réponses à ce sujet
#2

Kaquaoify
-

- Membres
- 99 messages
Membre
- Gender:Male
- Location:Derrière mon pare-feu
- Interests:Informatique, programmation, développement, spaghettis
Posté 11 mars 2015 - 02:44
Salut, tu veux faire un robot suiveur de personne, mais de quelle taille, tu as déjà choisi tes moteurs ?
Il nous manque du détail pour t'aider, des idées, des recherches etc...
Précise un peu plus et on pourra t'aider 
- imengacha aime ceci
La théorie, c'est quand ça marche pas, mais on sait pourquoi.
La pratique, c'est quand ça marche, mais on sait pourquoi.
Quand la pratique rejoint la théorie, ça marche pas et on sait pas pourquoi
#3
Leon
-

- Membres
-

- 1â¯289 messages
Membre passionné
- Gender:Male
Posté 11 mars 2015 - 07:38
Où est le rapport entre le fait que le robot soit "suiveur de personne" et le choix de la carte de puissance?
Leon.
- imengacha aime ceci
BOB4, mon drone hélicoptère autonome d'intérieur http://heli.bot.free.fr/
BOB3, mon robot autonome d'intérieur avec WiFi + Foxboard Linux http://ze.bot.free.fr/
BOB5, robot bipède simulé, puis tentative de réalisation (fail)
#4
imengacha
-
- Membres
- 4 messages
Nouveau membre
- Gender:Female
- Location:Tunisie
Posté 12 mars 2015 - 12:05
j'aimerais faire un modéle d'un robot bagagiste aideur surtout pour les personnes agés ,c'est mon projet d fin d'etudes,juste un modéle,un robot du petite taille avec un port-clé ..j'ai pensée de choisir deux servomoteurs 12v,2 capteurs gyroscopique acclérometre,deux module bluetooth hc-05 et bien sur une carte arduino.
le probléme : comment varier le vitesse du robot pour que sera adapté avec le vitesse du personne ?
je pense que le choix du batteries est interessant..aussi le choix d'une carte du puissance ,un collégue me conseille d'utiliser un pont en H et un driver au lieu de L298
je commencerais bientot de realiser mon carte,pour cela j'aimerais savoir vos opinions concernant la carte du puissance et merci d'avance 
#5
Microrupteurman
-

- Modérateur
-
- 2â¯210 messages
Pilier du forum
- Gender:Male
- Location:Aquitaine,Gironde
- Interests:Tout
Posté 12 mars 2015 - 12:25
Herm, un l298, c'est quoi ?
un collègue me conseille d'utiliser un pont en H
Page Facebook : https://www.facebook...appartelier2.0/
Page Twitter : https://twitter.com/2Appartelier (bateau seulement)
Boutique Robot-Maker : https://www.robot-ma...er-20/produits/
Besoin d'une impression 3D grand format ? Contactez moi !
#7
Microrupteurman
-
- Modérateur
-
- 2â¯210 messages
Pilier du forum
- Gender:Male
- Location:Aquitaine,Gironde
- Interests:Tout
Posté 12 mars 2015 - 01:22
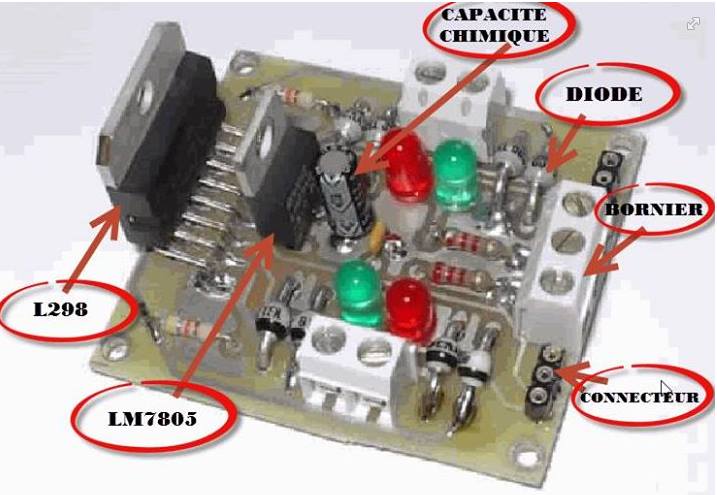
L298 est un double pont en H.
http://www.st.com/web/en/catalog/sense_power/FM142/CL851/SC1790/SS1555/PF63147
- imengacha aime ceci
Page Facebook : https://www.facebook...appartelier2.0/
Page Twitter : https://twitter.com/2Appartelier (bateau seulement)
Boutique Robot-Maker : https://www.robot-ma...er-20/produits/
Besoin d'une impression 3D grand format ? Contactez moi !
#8
Melmet
-
- Modérateur
-
- 1â¯527 messages
Membre chevronné
- Gender:Male
Posté 12 mars 2015 - 01:23
L298 est un circuit integré qui doit adapter et redistribuer la tension de la batterie afin d'alimenter le robot

Faux!! www.google.fr est ton ami

et cherche un peut sur la page d’accueil du forum, tu auras pas mal d'aide.
Dsl d’être aussi sec, mais bon...
- Microrupteurman et imengacha aiment ceci
#9
Leon
-
- Membres
-
- 1â¯289 messages
Membre passionné
- Gender:Male
Posté 12 mars 2015 - 06:36
j'aimerais faire un modéle d'un robot bagagiste aideur surtout pour les personnes agés ,c'est mon projet d fin d'etudes,juste un modéle,un robot du petite taille avec un port-clé ..j'ai pensée de choisir deux servomoteurs 12v,2 capteurs gyroscopique acclérometre,deux module bluetooth hc-05 et bien sur une carte arduino.
le probléme : comment varier le vitesse du robot pour que sera adapté avec le vitesse du personne ?
je pense que le choix du batteries est interessant..aussi le choix d'une carte du puissance ,un collégue me conseille d'utiliser un pont en H et un driver au lieu de L298
je commencerais bientot de realiser mon carte,pour cela j'aimerais savoir vos opinions concernant la carte du puissance et merci d'avance
Si tu utilises des servomoteurs de modélisme modifiés en guise de moteurs de propulsion, alors tu n'as pas besoin de pont en H pour les commander. Modifié = permettant une rotation continue à plus de 360° = suppression des butées et déconnexion mécanique du potentiomètre. Recherche ça sur Google.
Pour commander ton servomoteur Il te suffit d'injecter un signal servo classique dans tes servos. Tout l'étage de puissance restera dans le servo, tu n'as pas besoin de pont en H, donc pas besoin de L298N.
Sinon, c'est quoi un robot "avec port clé"?
Leon.
- imengacha aime ceci
BOB4, mon drone hélicoptère autonome d'intérieur http://heli.bot.free.fr/
BOB3, mon robot autonome d'intérieur avec WiFi + Foxboard Linux http://ze.bot.free.fr/
BOB5, robot bipède simulé, puis tentative de réalisation (fail)
#10
ailgorbot
-

- Membres
- 107 messages
Membre
- Gender:Male
- Interests:IOIO
Posté 12 mars 2015 - 08:33
"capteurs gyroscopique acclérometre,deux module bluetooth hc-05 et bien sur une carte arduino."
Tu pourrais remplacer tout ça avec un Android et la carte IOIO-OTG ?
Je débute comme toi. C'est un peu ce que j'essaye de faire.... http://www.robot-maker.com/forum/topic/9826-ailgor-bot/ ou http://www.robot-maker.com/forum/blog/55/entry-44-les-composants-dailgor-bot/
- imengacha aime ceci
Robot de téléprésence : IOIO-OTG Robot WebRTC
Car RC : AilgorRC
#11
imengacha
-
- Membres
- 4 messages
Nouveau membre
- Gender:Female
- Location:Tunisie
Posté 12 mars 2015 - 11:06
"c'est quoi un robot "avec port clé"?"
j'ai pensé a utiliser deux capteurs gyroscope l'un porté par la personne ( monté sur une porte clé ) et l'autre capteur sur mon robot. chacun de ces deux capteurs envoi leur position vers la carte arduino et cette dernière calcule la différence entre la position des deux capteurs alors le robot cherche a maintenir cette différence constante en variant leur vitesse !!
"Tu pourrais remplacer tout ça avec un Android et la carte IOIO-OTG ?"
lje n'ai aucune idee sur l'Android et j'aimerais pas perdu trop de temps pour la formation 
#12
Leon
-
- Membres
-
- 1â¯289 messages
Membre passionné
- Gender:Male
Posté 13 mars 2015 - 06:37
"c'est quoi un robot "avec port clé"?"
j'ai pensé a utiliser deux capteurs gyroscope l'un porté par la personne ( monté sur une porte clé ) et l'autre capteur sur mon robot. chacun de ces deux capteurs envoi leur position vers la carte arduino et cette dernière calcule la différence entre la position des deux capteurs alors le robot cherche a maintenir cette différence constante en variant leur vitesse !!
Dans ce cas, pourquoi n'expliques-tu pas dès le début ce que tu veux faire? Pourquoi monter ton "gyroscope" sur un porte clé?
Est-ce que tu as bien compris ce qu'était un gyroscope? Un gyroscope ne peut en aucun cas déterminer la distance entre 2 objets, ou la position relative entre 2 objets. Une centrale inertielle à plusieurs milliers d'euros pourrait peut-être le faire, mais pas un gyroscope.
J'arrête là de mon côté. Tu pars de trop loin, tu n'es pas réaliste dans tes idées, tu ne nous dis pas ce que tu veux faire.
Leon.
BOB4, mon drone hélicoptère autonome d'intérieur http://heli.bot.free.fr/
BOB3, mon robot autonome d'intérieur avec WiFi + Foxboard Linux http://ze.bot.free.fr/
BOB5, robot bipède simulé, puis tentative de réalisation (fail)
Répondre à ce sujet









Aussi étiqueté avec au moins un de ces mots-clés : Suiveur de personne





1 utilisateur(s) li(sen)t ce sujet
0 members, 1 guests, 0 anonymous users




