Mon contenu
Mon contenu Non spécifié
Non spécifié





 Posté par
Posté par Salut à tous,
Déjà 2 ans que je n'ai pas donné de nouvelles sur le forum. Ce n'ai pas pour autant que j'ai abandonné mon projet. Bien au contraire.
Voici un peu le résumé de ces 2 dernières années :
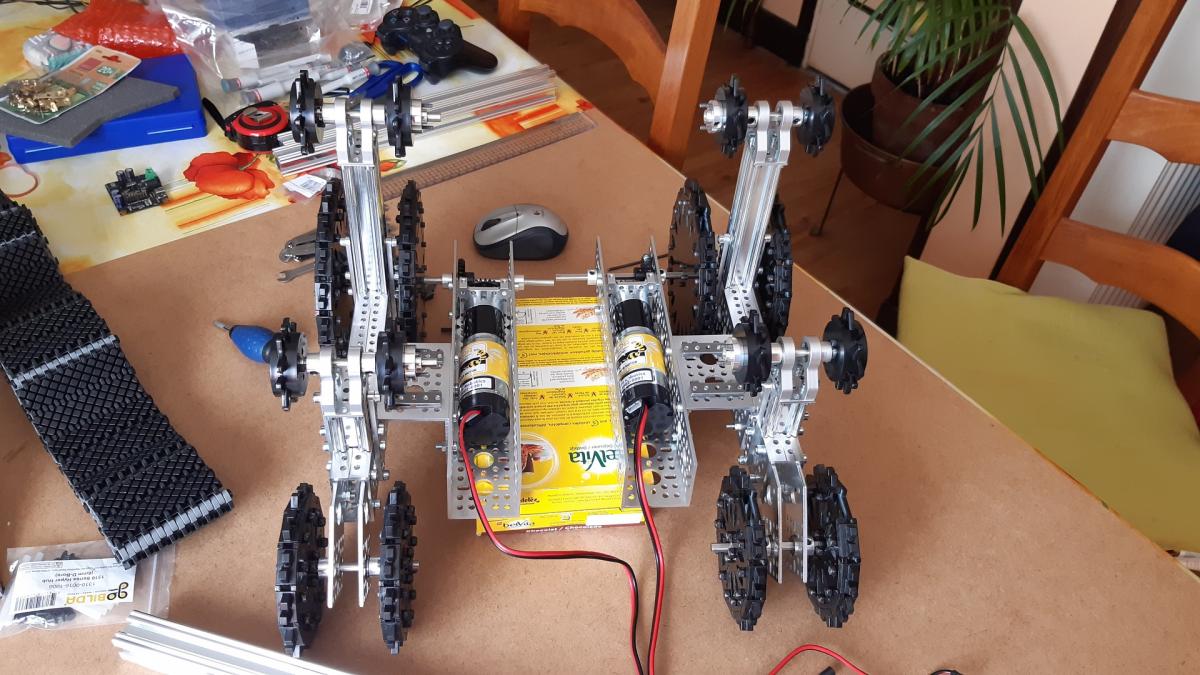
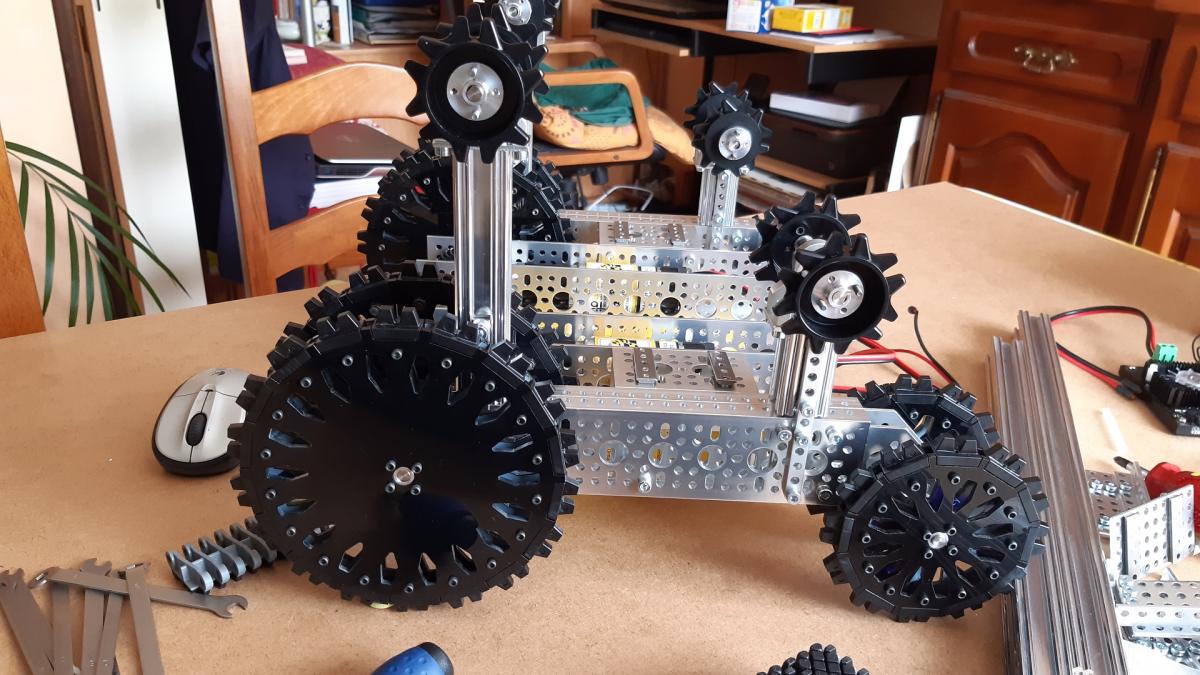
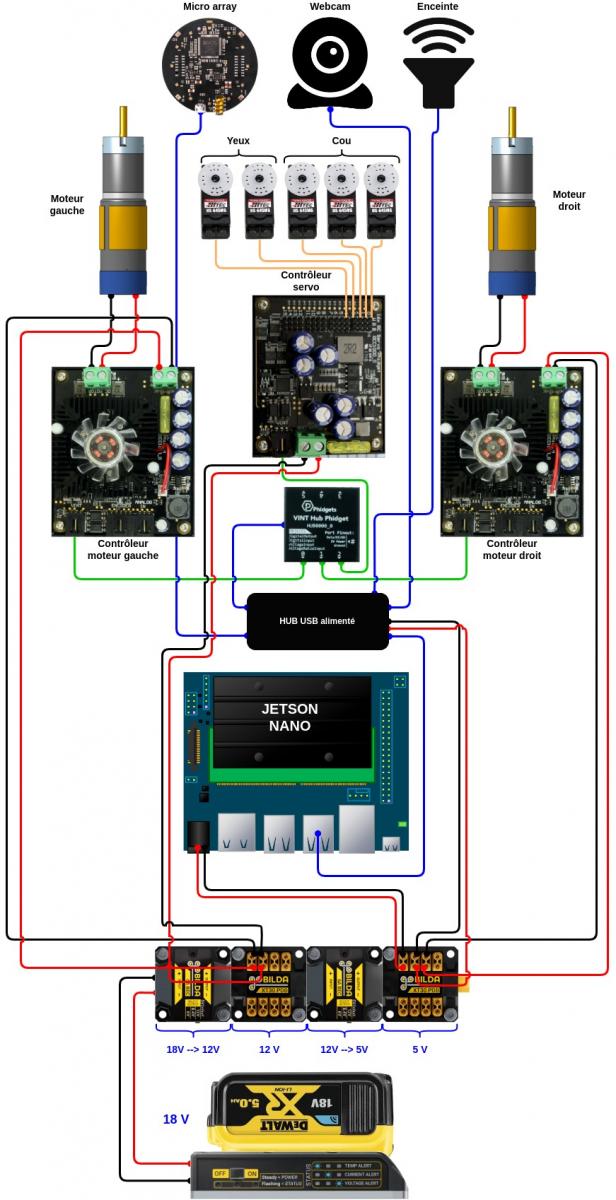
- mise en place d'un système d'alimentation goBilda avec batterie DeWALT. Cela me permet d'avoir les différentes tensions dont j'ai besoin (5V et 12V), une autonomie assez longue et un système sécurisé. Cela m'a éviter de me prendre la tête avec des systèmes plus complexes. Mais merci quand même pour votre aide sur cette partie-là

- remplacement du Raspberry Pi par une carte NVIDIA Jetson Nano pour permettre d'utiliser la puissance de calcul CUDA (pour la partie vision artificielle). Cette carte
- utilisation d'un conteneur docker "Jetson Nano" dédié à la vision artificielle (détection d'objets avec CUDA). La reconnaissance faciale fonctionne toujours sans CUDA.
- mise en place d'un système d'un agent conversationnel par le biais de ChatGPT 3.5 (assez bluffant, même si cette version est un peu dépassée !)
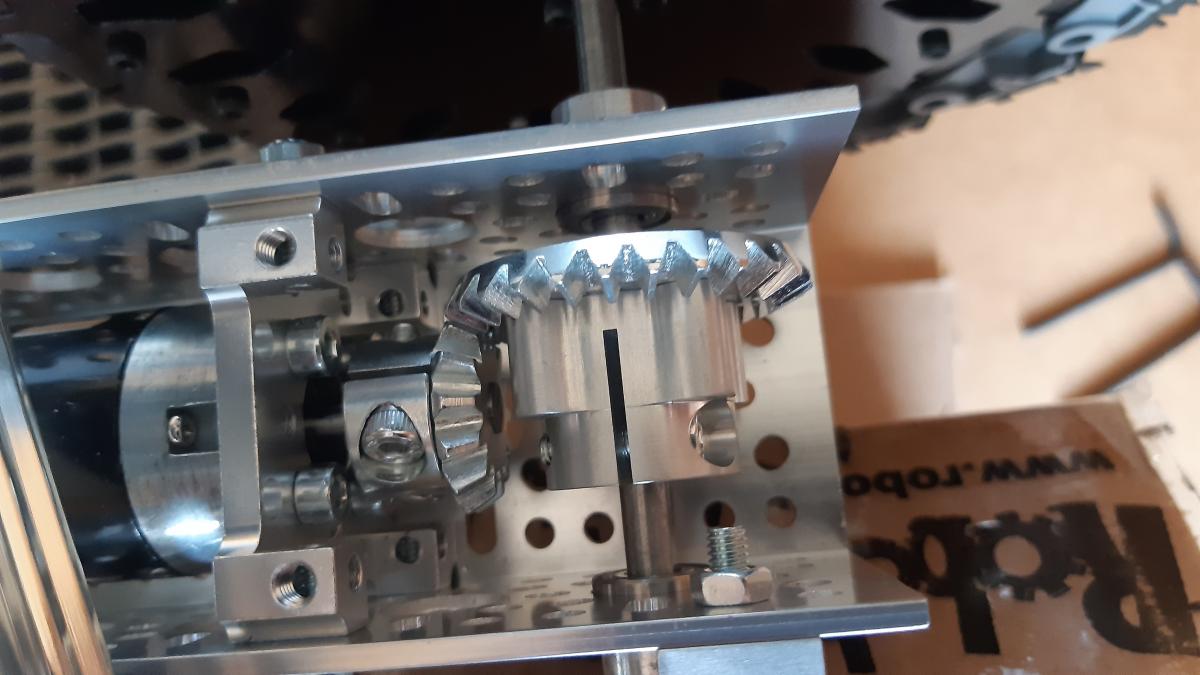
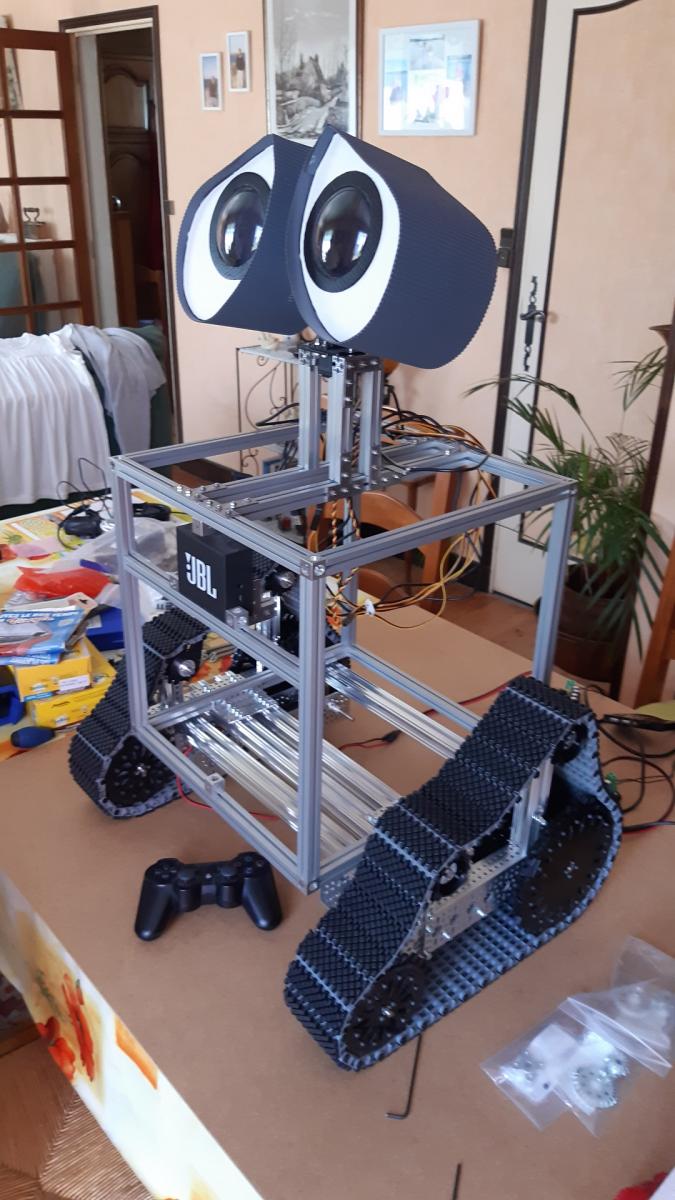
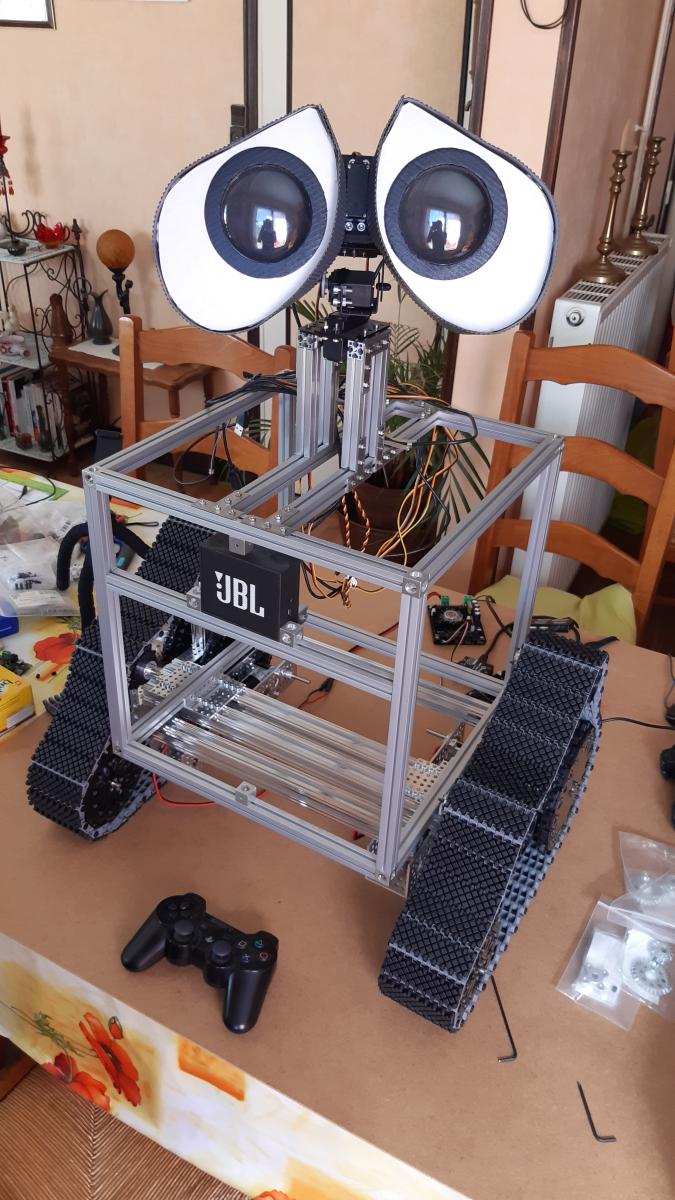
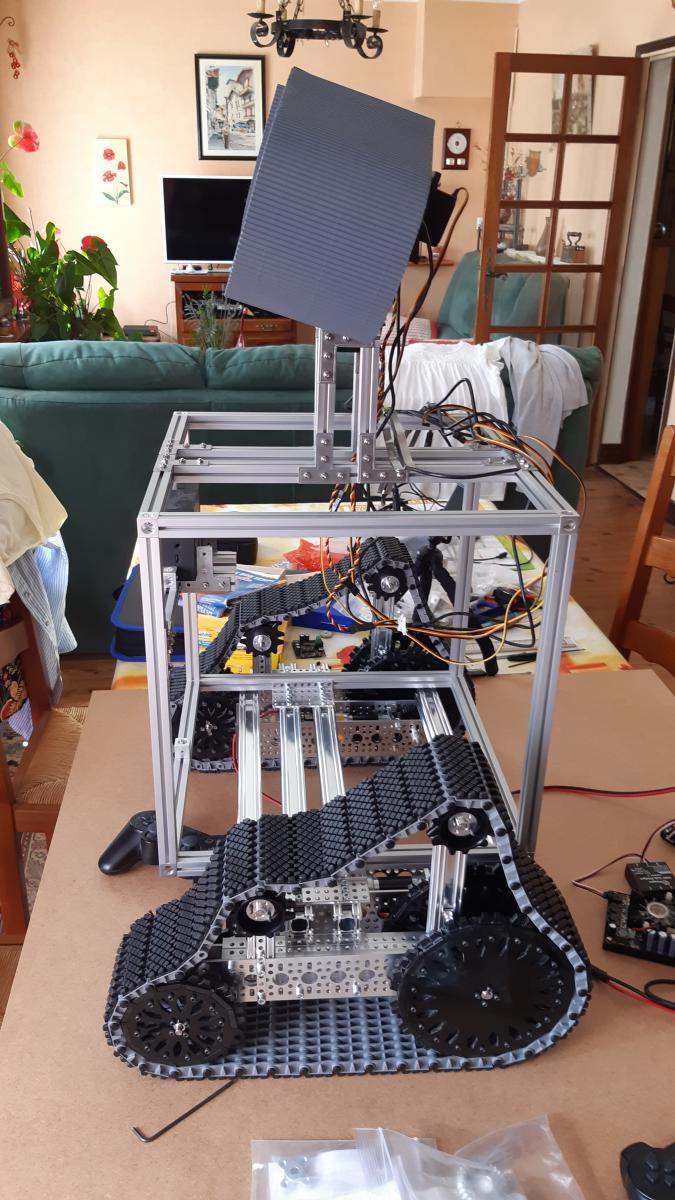
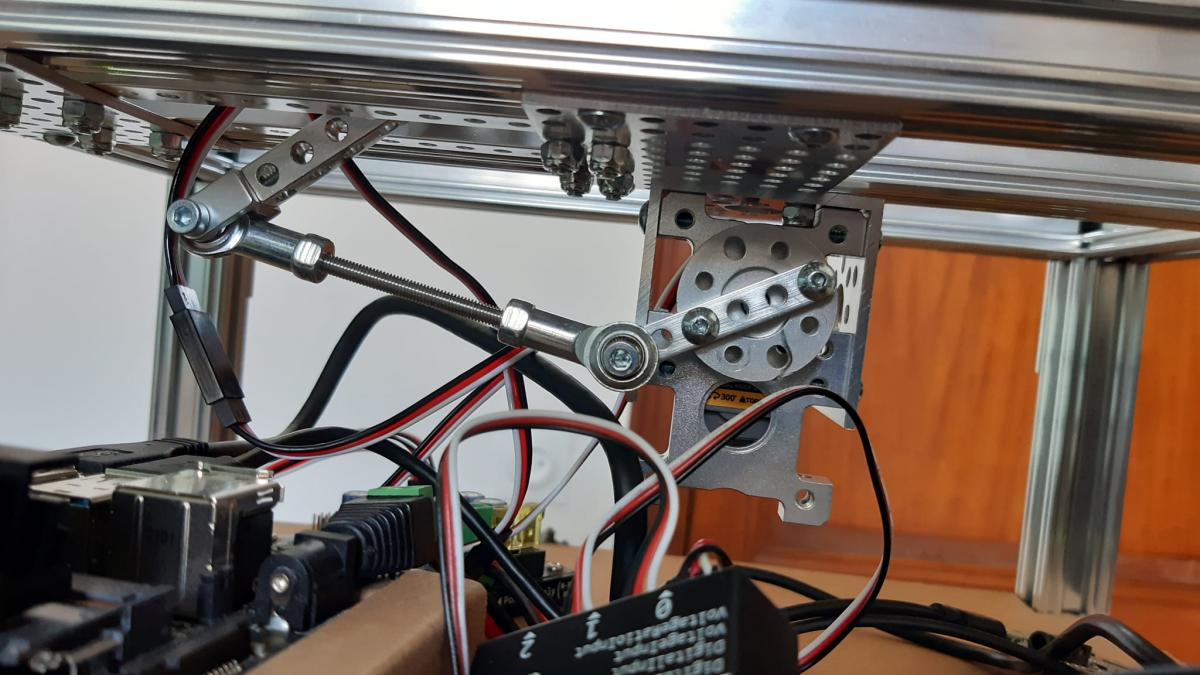
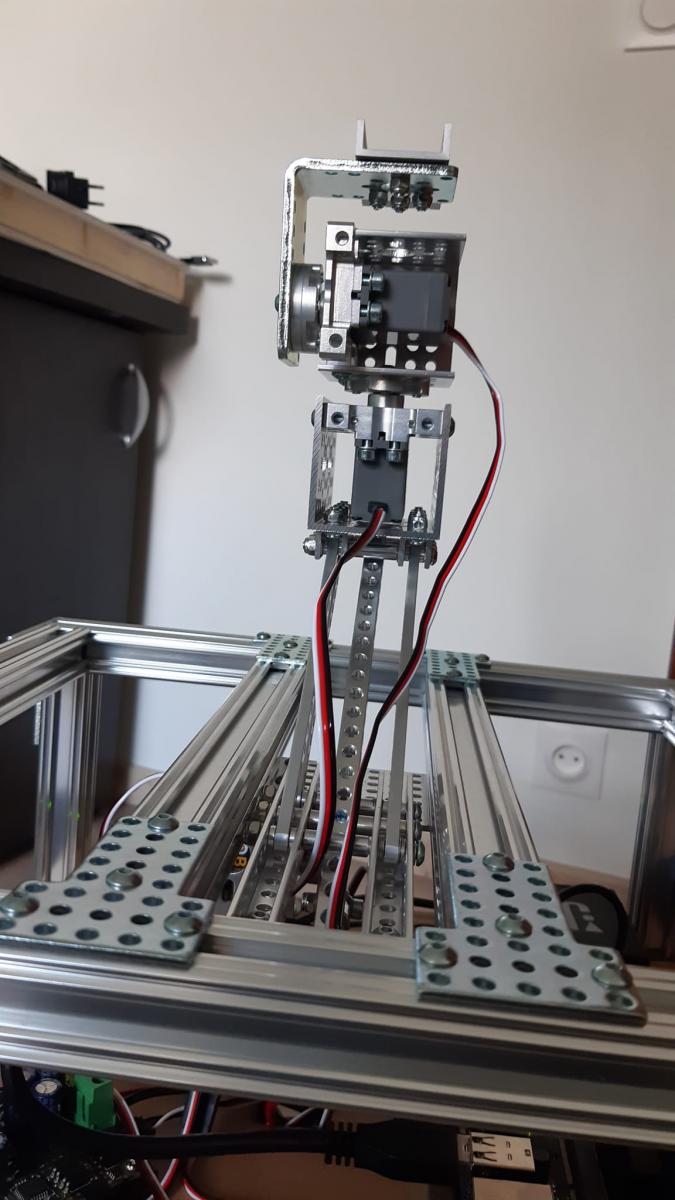
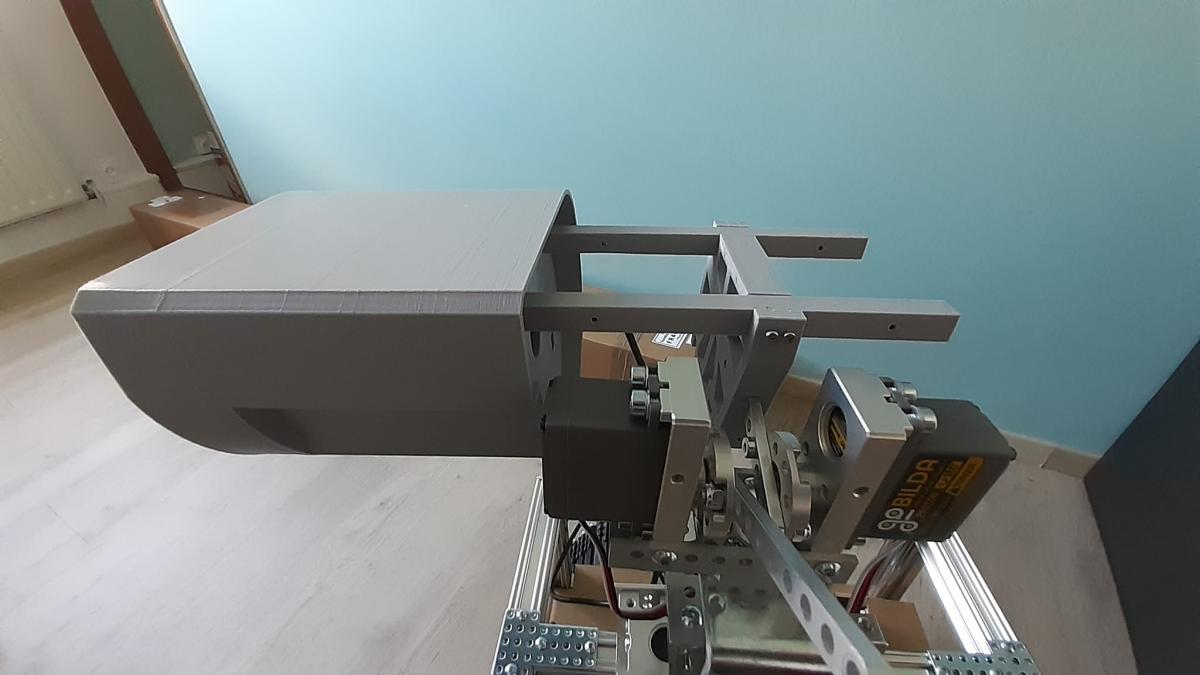
- refonte du cou : il peu maintenant s'étendre en hauteur. Mais je vais le revoir car ma conception a tendance à un peu trembler
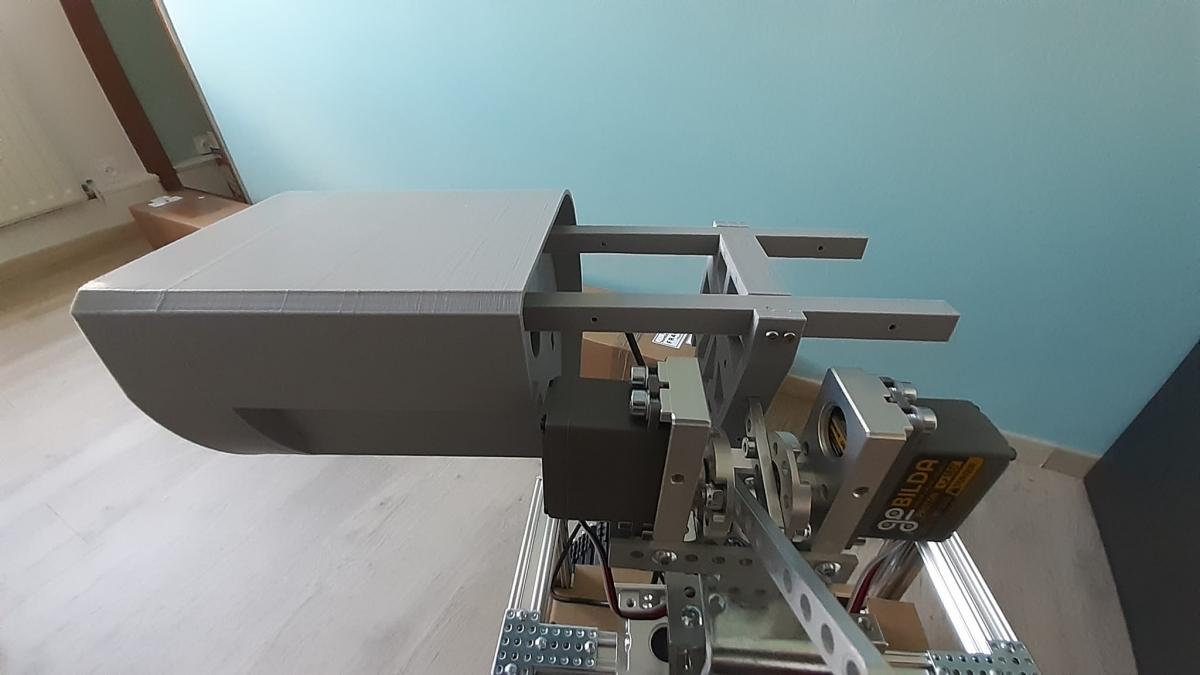
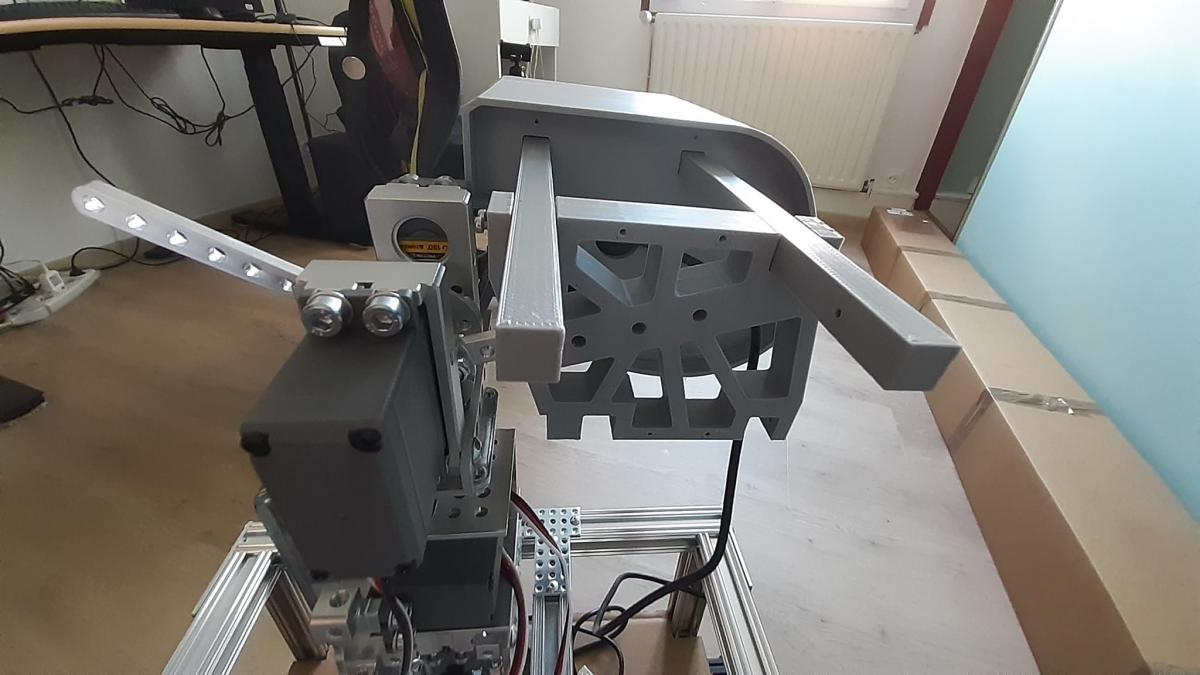
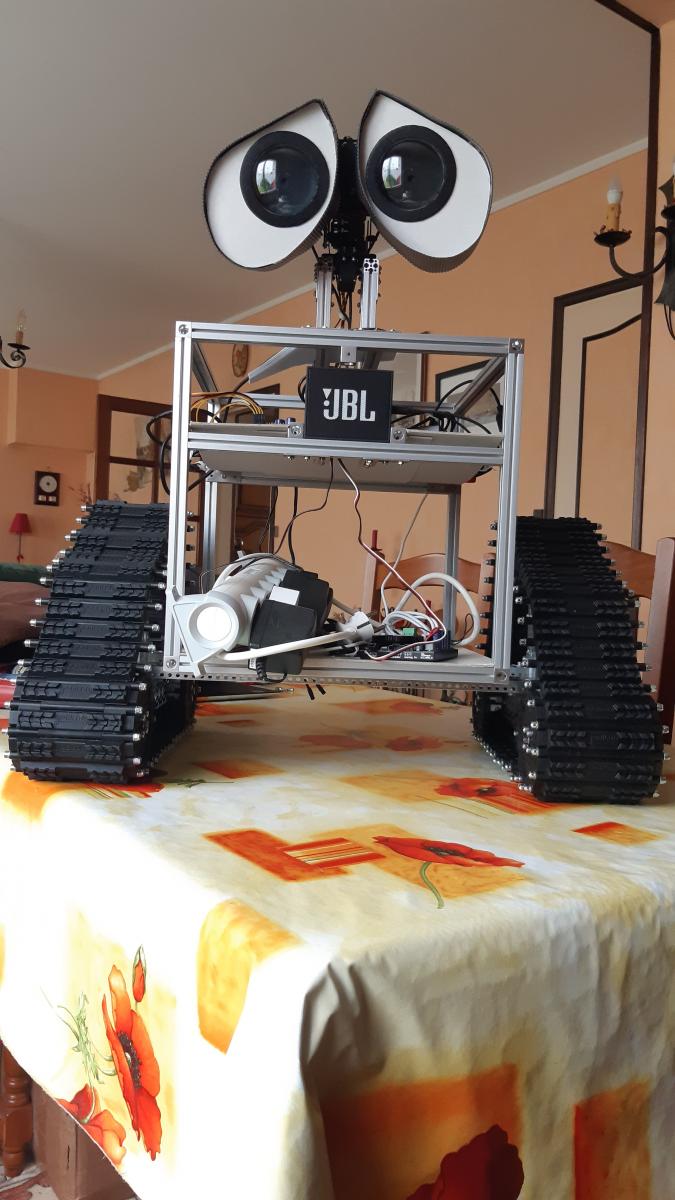
- refonte des yeux : avec l'acquisition d'une imprimante 3D, j'ai enfin pu remplacer les anciens yeux en carton (et bouchons de liège !) par des yeux dignes de ce nom. Conception du mouvement des yeux à revoir aussi car les servos doivent porter une charge trop lourde. Nouvelle conception en cours.
- mise en place d'une caméra par œil pour, dans l'avenir, pouvoir faire de la vision stéréoscopique et estimer les distances. Des systèmes d'IA permettent de faire ça avec une seule caméra mais cela demande pas mal de puissance de calcul, et je n'ai pas trouvé ça très concluant.
Comme vous le voyez ça avance ...
Quelques photos et vidéos pêle-mêle :












 ). C'est une vidéo où je teste un écran OLED en animant des yeux pour lesquels je m'étais très fortement inspiré des yeux de Cozmo.
). C'est une vidéo où je teste un écran OLED en animant des yeux pour lesquels je m'étais très fortement inspiré des yeux de Cozmo.  )
) 

 ). Mais pourquoi pas tenter d'embarquer un Jetson Nano ou une carte de ce genre pour traiter toute cette partie ...
). Mais pourquoi pas tenter d'embarquer un Jetson Nano ou une carte de ce genre pour traiter toute cette partie ...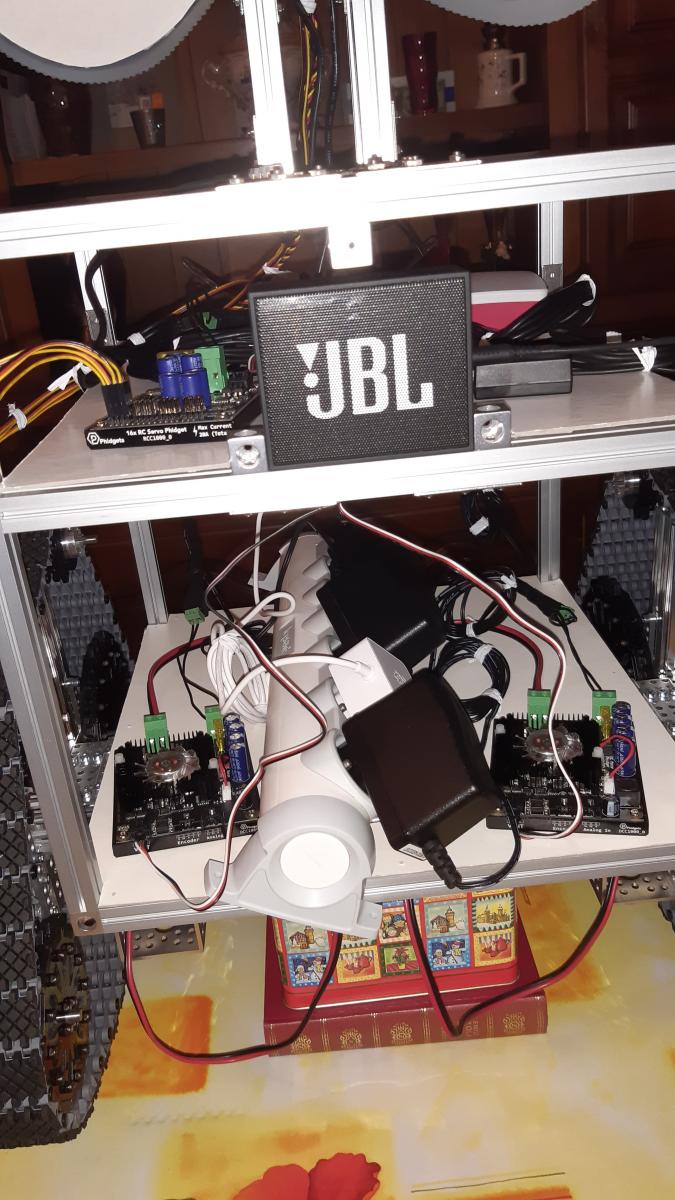

 ) et ne plus avoir cette multiprise qui traine derrière ! Mais pour cette partie-là, je ferai appel à vos lumières. Je vais d'abord lister tous les voltages / ampérages des cartes / contrôleurs que j'utilise pour savoir quelle(s) batterie(s) utiliser et comment brancher tout ça.
) et ne plus avoir cette multiprise qui traine derrière ! Mais pour cette partie-là, je ferai appel à vos lumières. Je vais d'abord lister tous les voltages / ampérages des cartes / contrôleurs que j'utilise pour savoir quelle(s) batterie(s) utiliser et comment brancher tout ça. Il faudrait que je trouve un système similaire pour cette partie-là, ou que je teste avec une vis plate comme vous m'avez conseillé.
Il faudrait que je trouve un système similaire pour cette partie-là, ou que je teste avec une vis plate comme vous m'avez conseillé.