Cliquez moi.
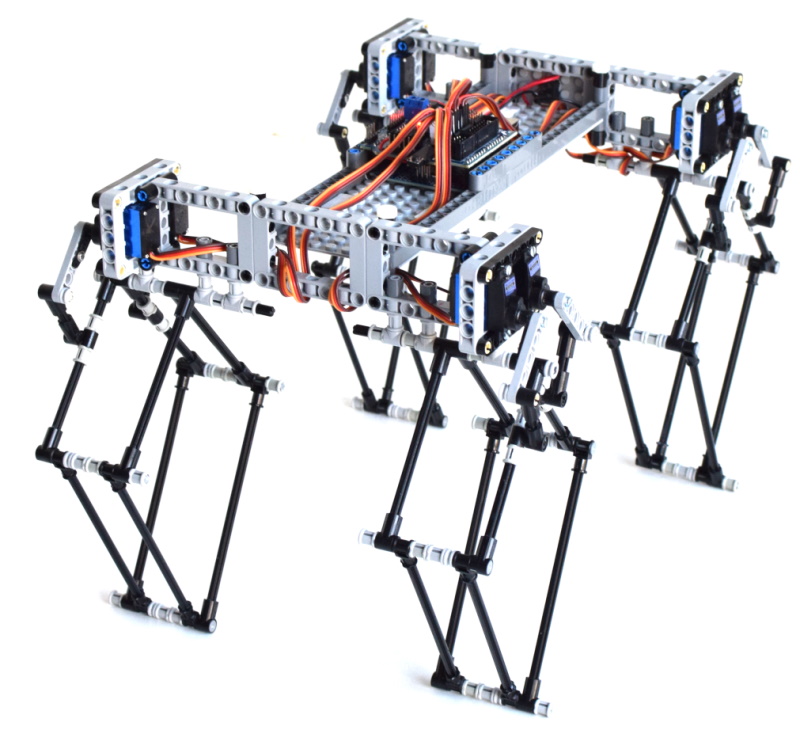
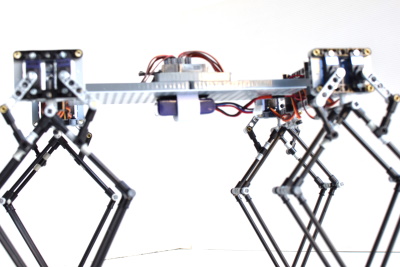
Voici mon dernier quadrupède.
FourBaQuad500, comme son nom l'indique, ne pèse que 500g.
Il est pourtant plus grand que son prédécesseur, https://www.robot-ma...apide/?p=111789
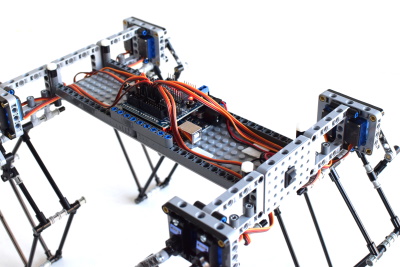
Le châssis a été allongé de 16mm (2L, unité Lego).
Outre le poids, ce qui caractérise cette nouvelle version, c'est le passage en 8,3V (2S) au lieu de 6V, précédemment.
C'est un avantage très important en terme de puissance. De plus, cela économise le poids de l'UBEC, presque 20g.
Vous remarquez que la batterie a été placée sous le châssis, ce qui permet d'abaisser le centre de gravité et de laisser toute la place pour l'électronique, au centre. L'interrupteur a été déplacé également, à l'arrière.
Les essieux, formés de 3 pièces rectangulaires, sont collés. Auparavant, ils étaient consolidés par une barre supplémentaire.
Toutes ces modifications ont permis d'atteindre le poids de 500g et donnent à l'ensemble un coté très minimaliste.
La puissance est telle qu'il sautille et se renverse très facilement. Il ne me reste plus qu'à régler la bête.
Avec ce quadrupède, j'espère atteindre la vitesse de 10m en 10 secondes et concourir à la prochaine TRR qui a été reportée au deuxième trimestre 2021.