Mon contenu
Mon contenu Homme
Homme



 Posté par
Posté par Bonjour à tous,
Cette année la CFR portera sur ce thème :

Et oui, on va devoir prendre le large et voguer avec seulement un phare pour nous guider et arriver à bon port.
Je vais donc vous présenter les différents actions à accomplir.

Tout d'abord voyons les éléments de jeu. Cette année, il s'agit de bouées qui seront des objets semblable à des ecocups.
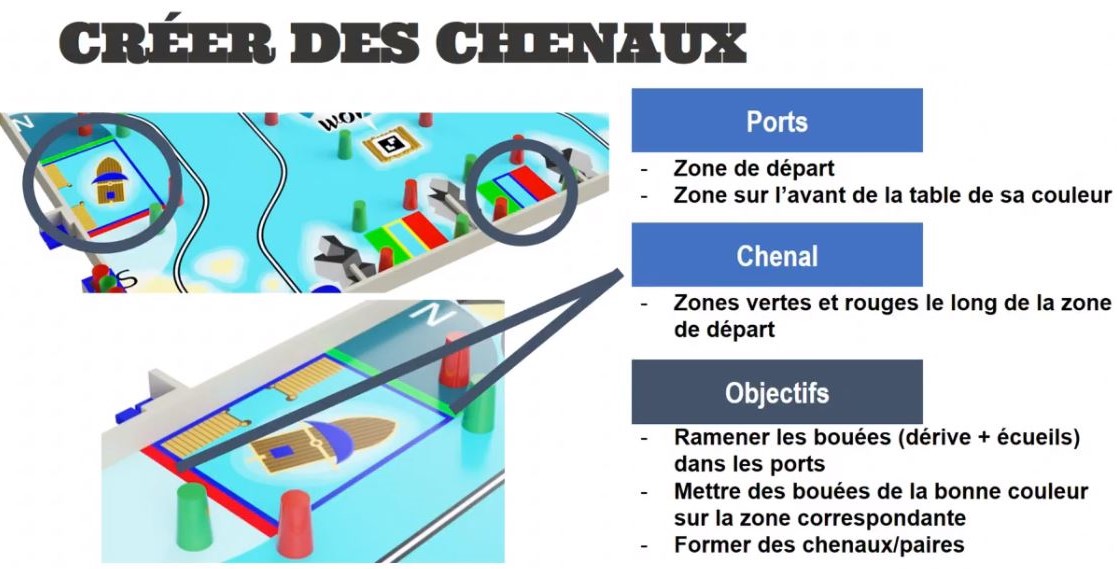
Bon mais que faire avec ces bouées ? La seule action nécessitant leur manipulation est la création de chenaux.
Les chenaux sont les lignes/zones vertes et rouges présentes le long de la zone de départ et un peu plus loin sur la table.
Le but est d'y déposer les bouée dans la zone qui leur correspond.
Ensuite, nous aurons à relever des manches à air.
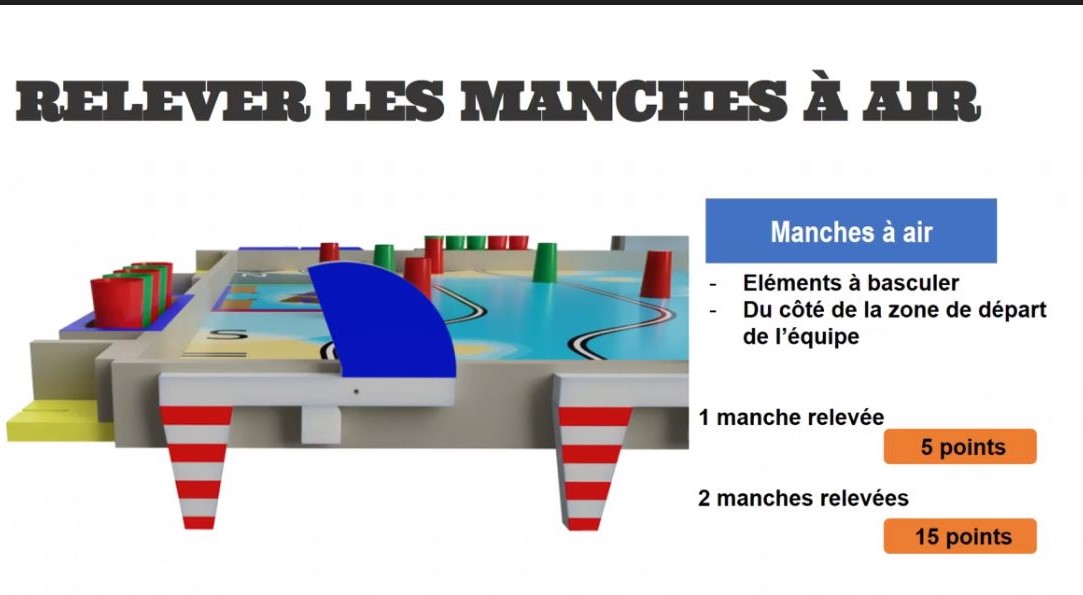
L'objectif est simplement de faire basculer des manches à air (2 par équipe) en poussant sur la partie bleu (ou jaune) qui dépasse de la table.
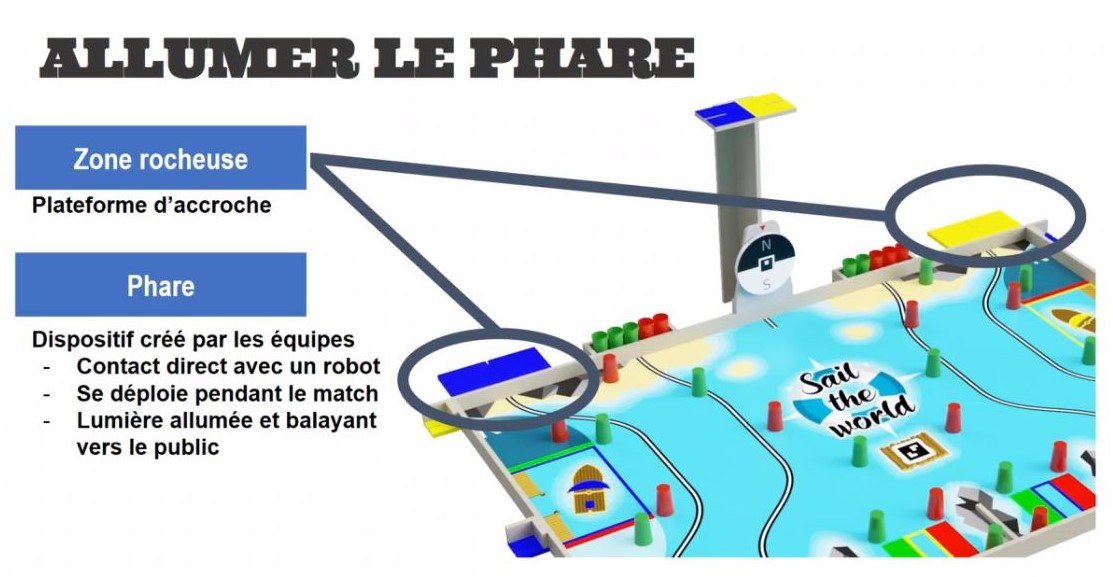
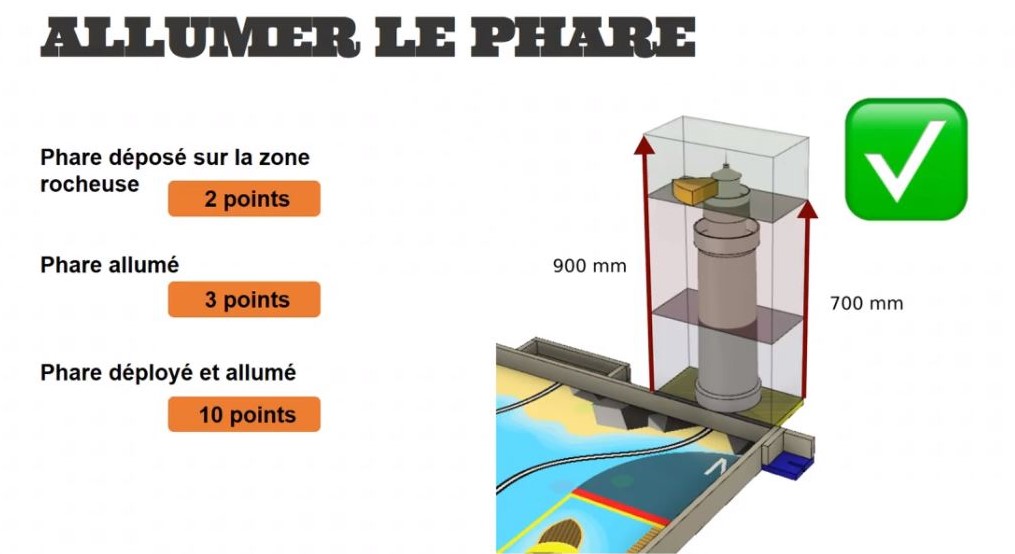
Cette année "l'expérience" est ici un phare. Ce phare sera installé avant le début du match et devra être activé par le robot au cours celui-ci.
Une fois activé le phare devra se déployer, puis balayer le publique avec de la lumière (comme un vrai phare quoi..).
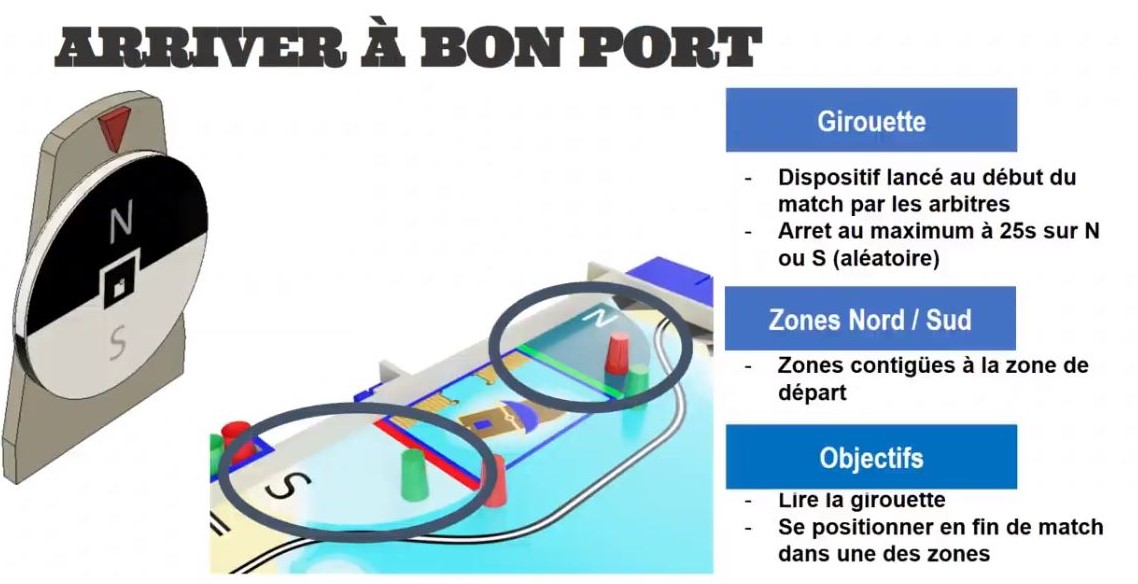
En bas du mât central, une boussole va être lancée par les arbitres au début du match tel une roue de fortune. Maximum 25sec après le début du match, celle-ci s’arrêtera en une flèche indiquera soit nord, soit sud. Ce nord/sud indiquera où le(s) robot(s) doit/doivent s’arrêter à la fin de la partie (zone avec un N et un S de chaque coté de la zone de départ.
Enfin dans les 5 dernières seconde du match, le robot devra hisser un drapeau avec un message.

Et bien entendu, l'évaluation de sa performance, qui donne des points bonus suivant une formule très complexe : bonus = 30% de points - Ecart
Nouveauté :
Cette année une petite nouveauté à été ajouté. Sur le support de balise ainsi qu'à d'autres endroit du plateau de jeu (comme par exemple sur la boussole ou vers le centre de la table) des tag ArUco. Ces tag, facile à identifier (avec un peu de reconnaissance d'image) et dont on peut connaitre l'orientation, peuvent servir à repérer un robot ou le sens d'un élément de jeu (comme par exemple la boussole).

Il s'agit ici que de la beta du règlement, l'officiel sera disponible le 20 octobre.
- Savoyard aime ceci