Mon contenu
Mon contenu Homme
Homme





 Posté par
Posté par Dans la catégorie "mécanique", voici la mini-série "Drivetrain 2026" en images.
Apres deux années de robot principal façon 4x4 Mecanum et quelques difficultés à maintenir une localisation précise pendant les matchs,
nous avons décidé de quitter la "Team Holonome" pour nous consacrer à la propulsion 2WD avec roues codeuses suspendues.
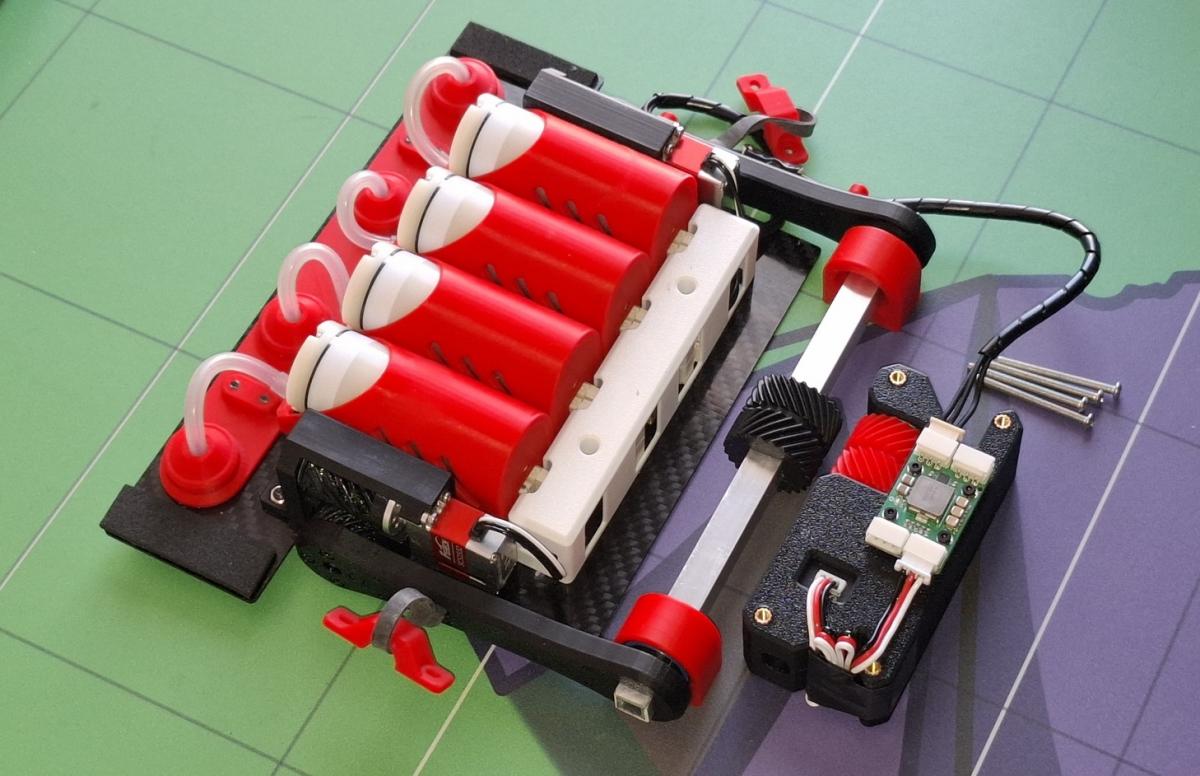
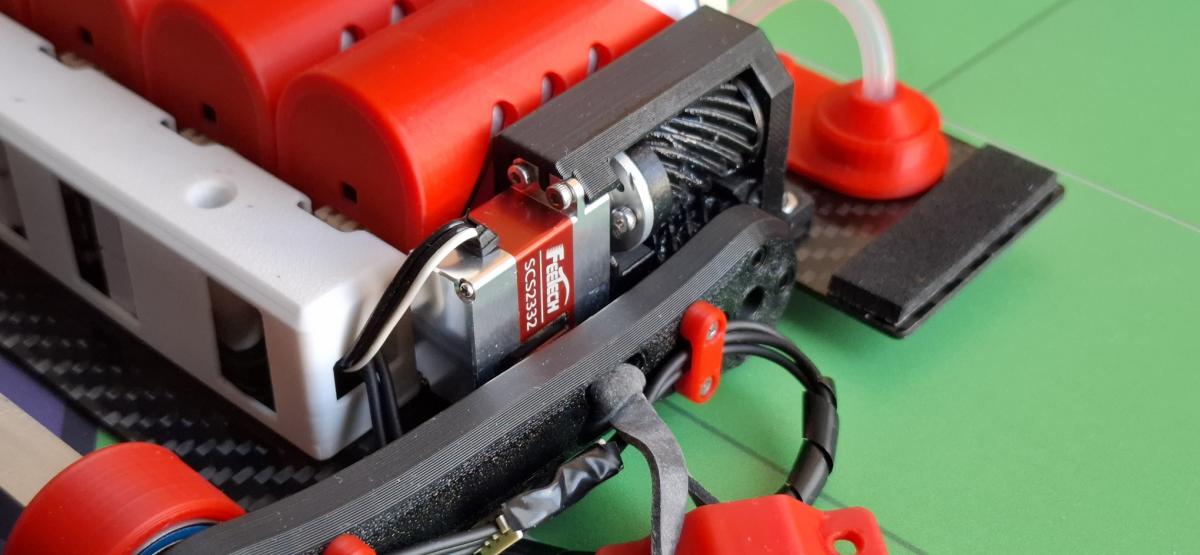
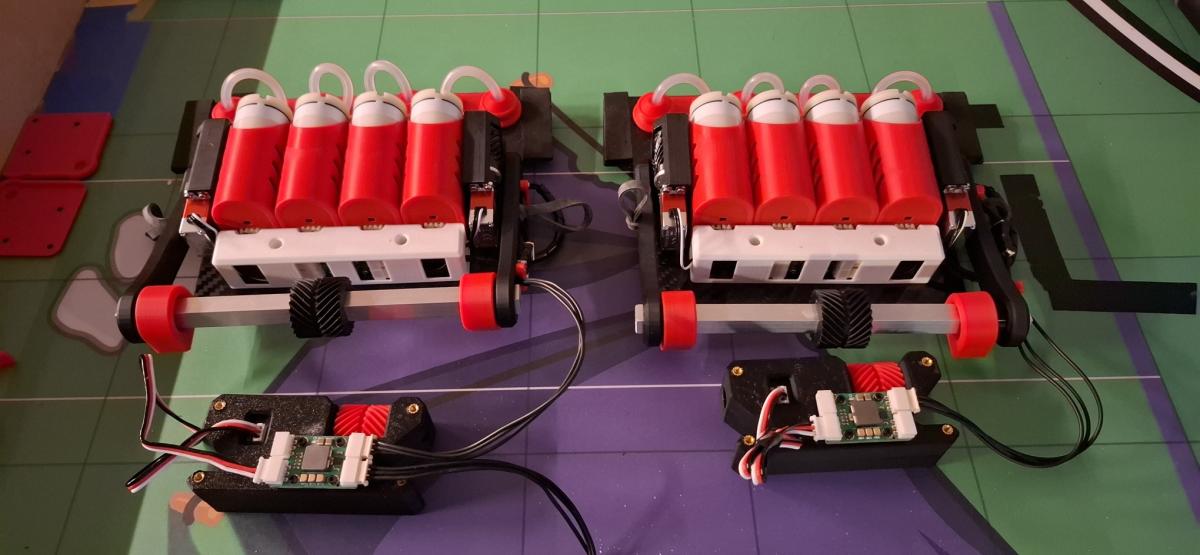
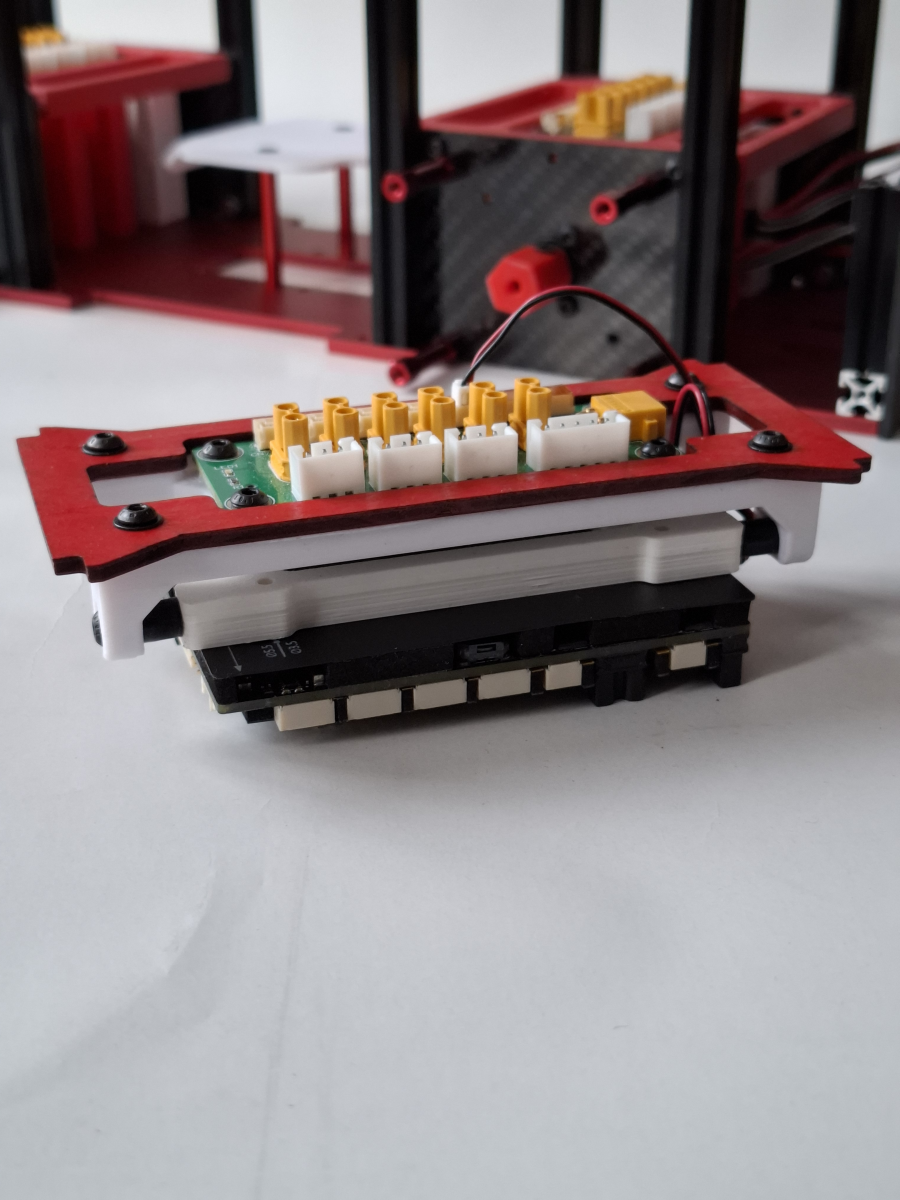
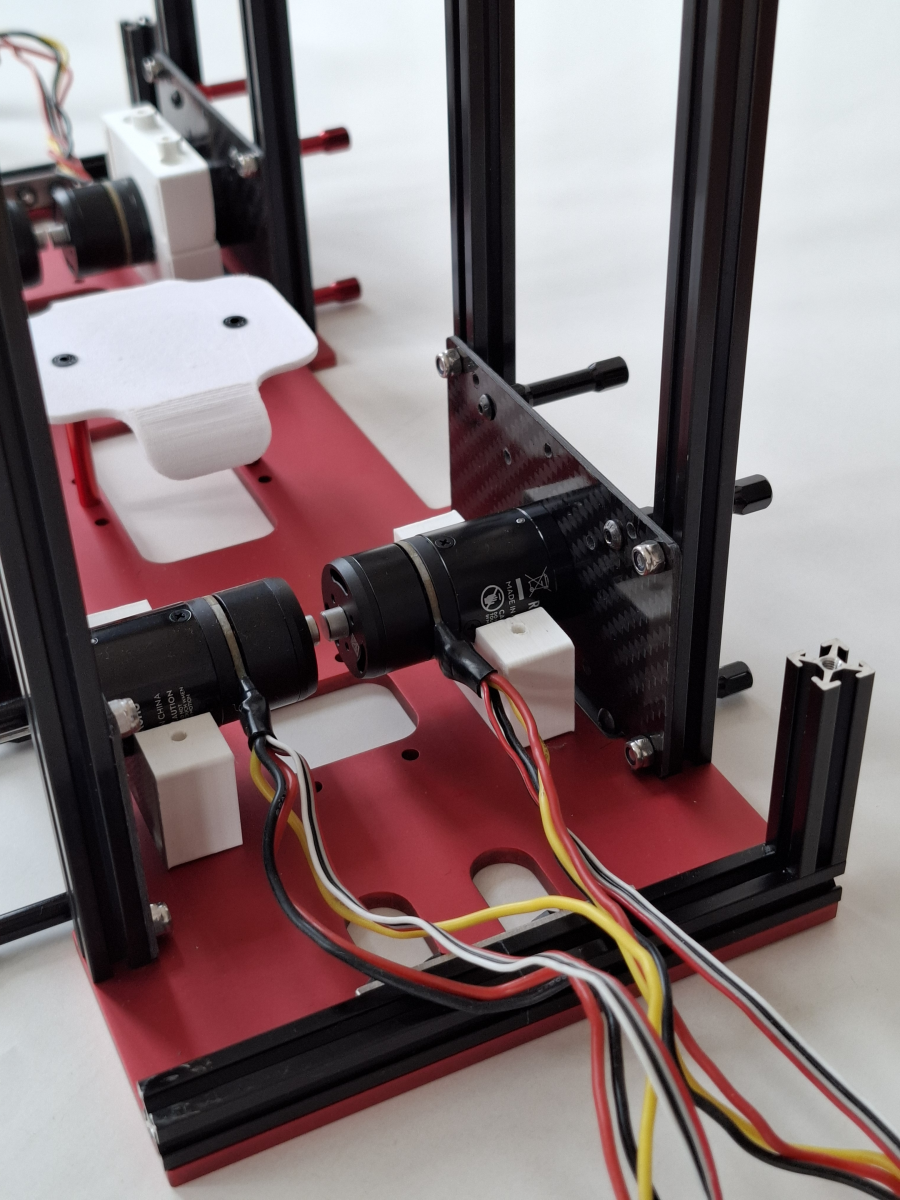
On garde les mêmes moteurs DJI, et on choisit des roues de SUMO :


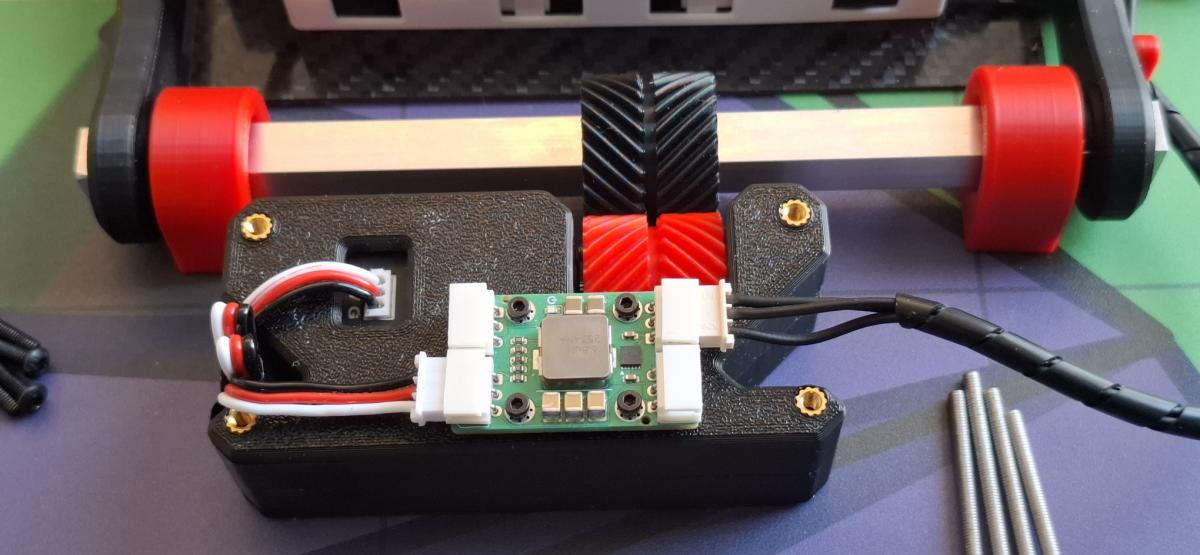
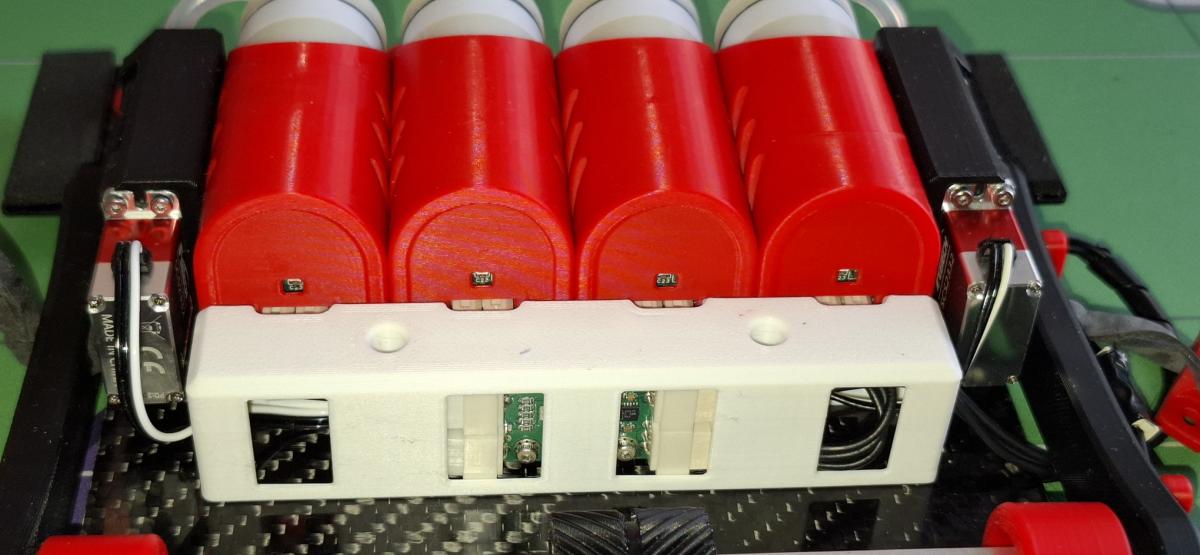
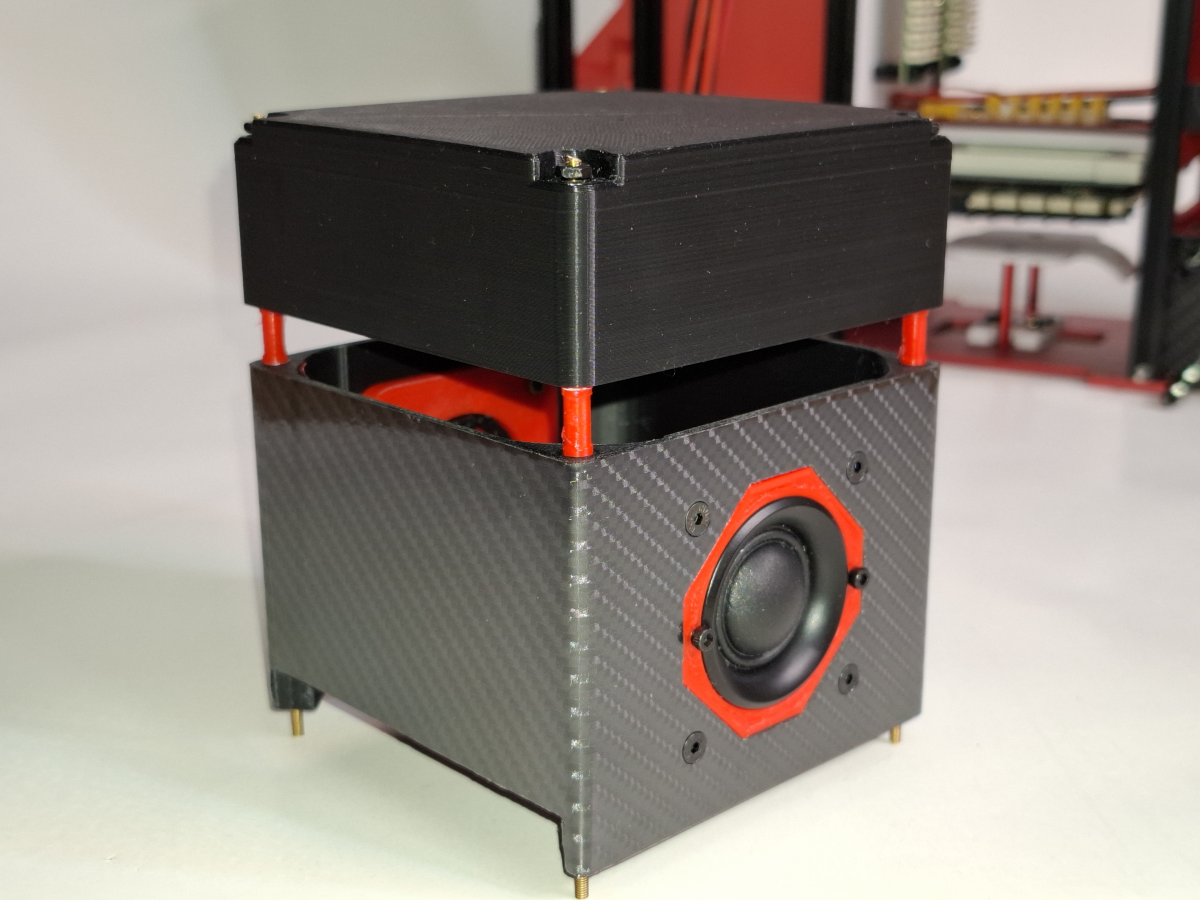
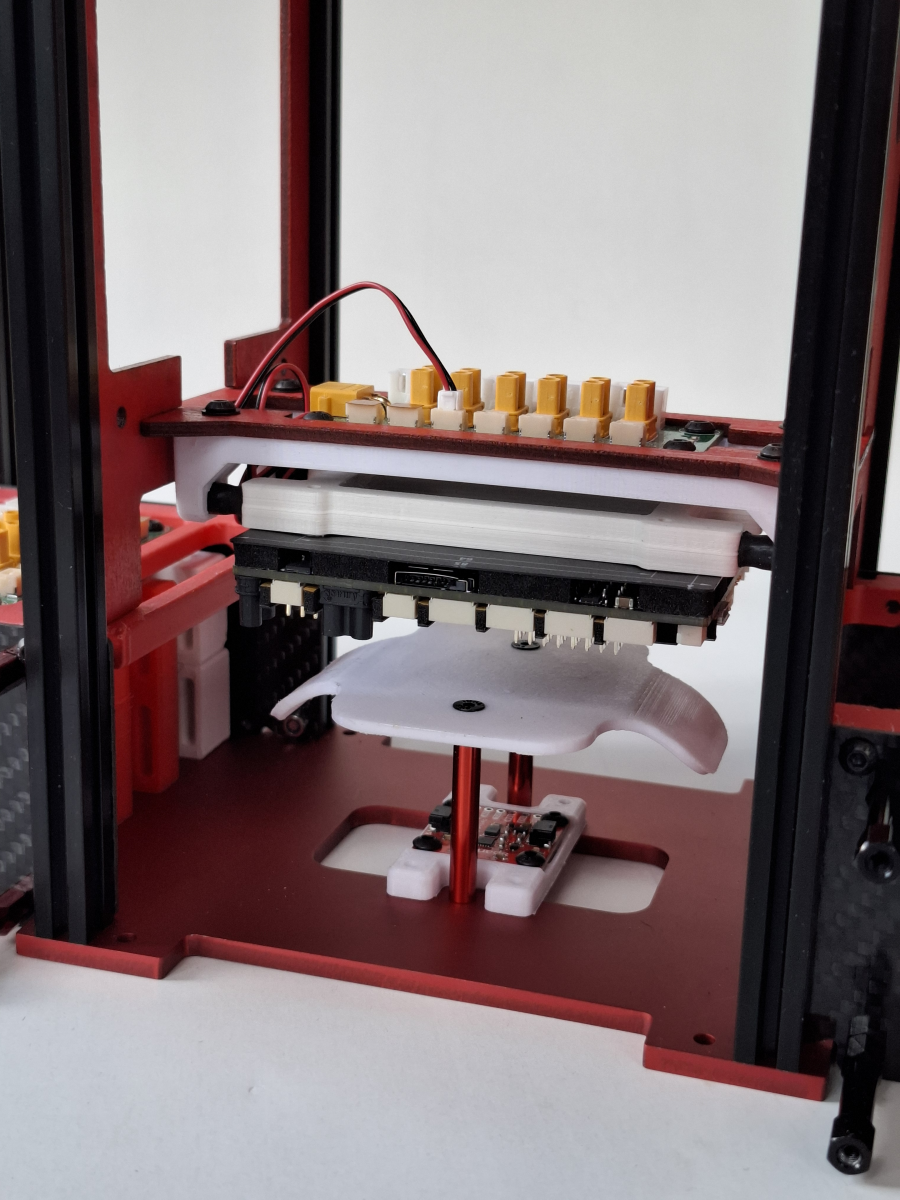
On ajoute une roue libre intégrant un aimant et une capteur de position hall fixe, le tout monté sur ressort :


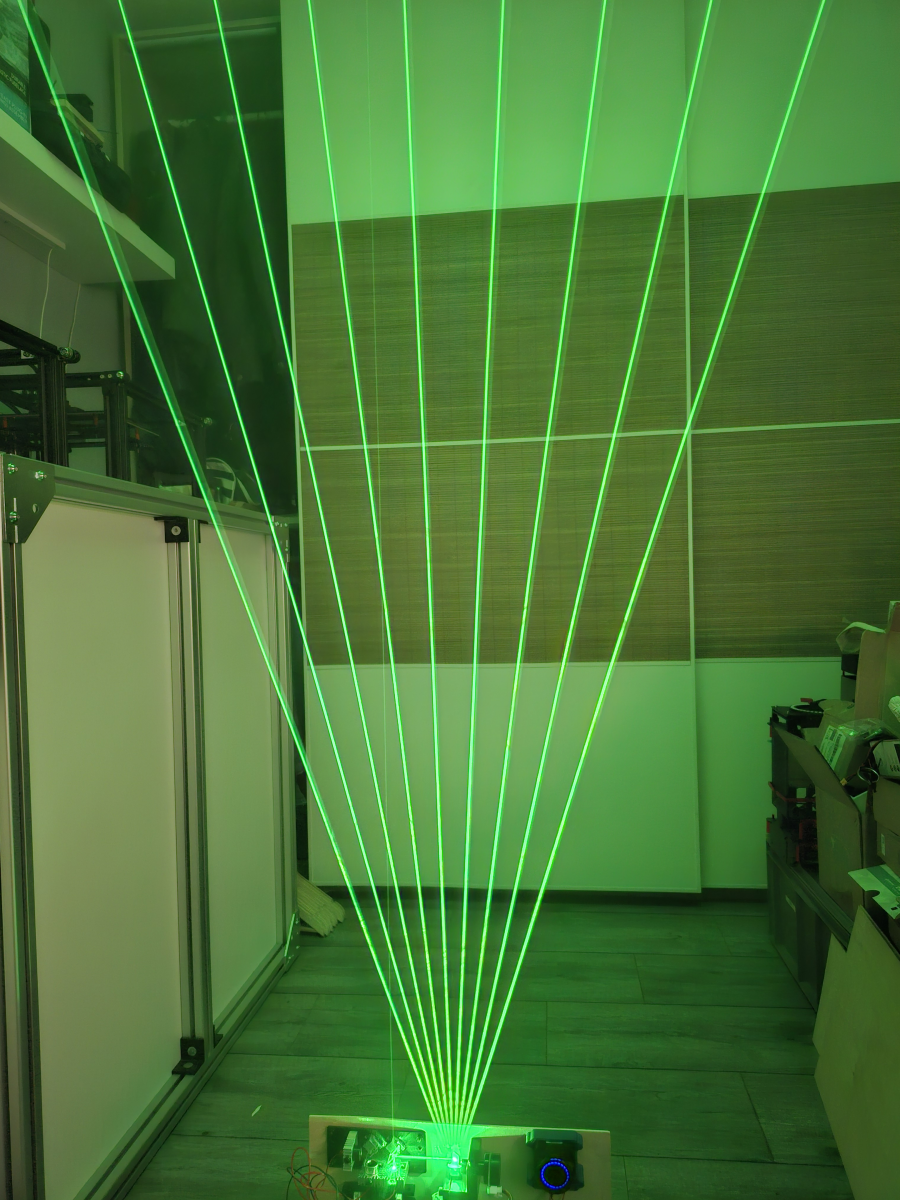
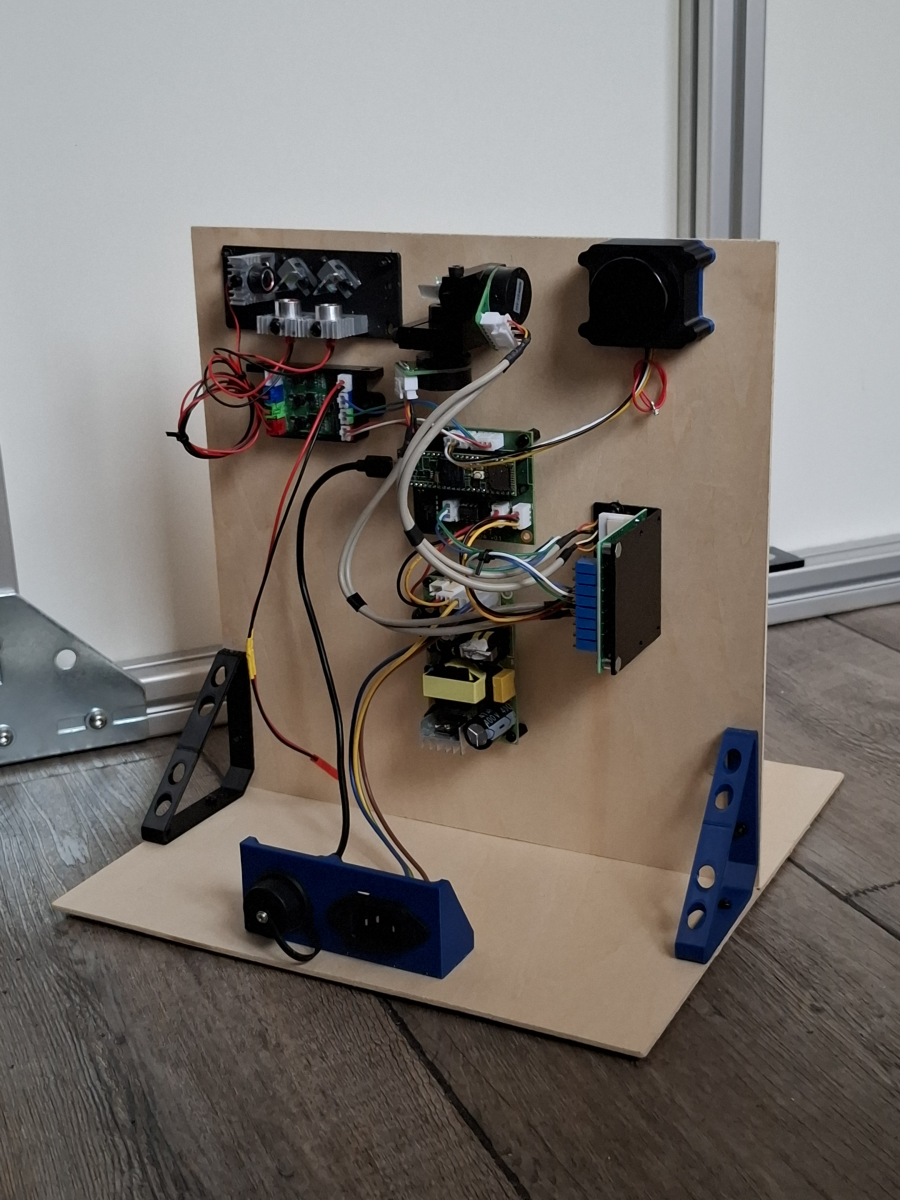
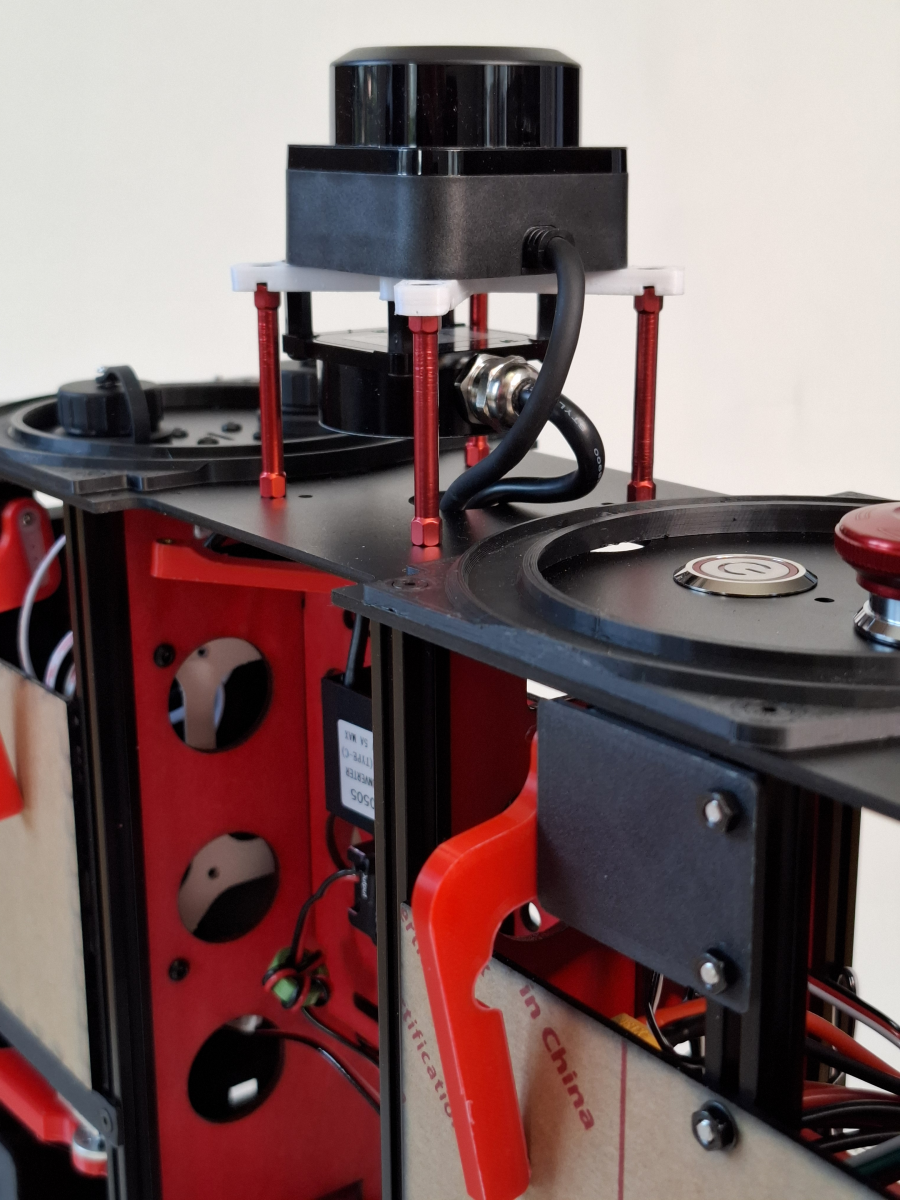
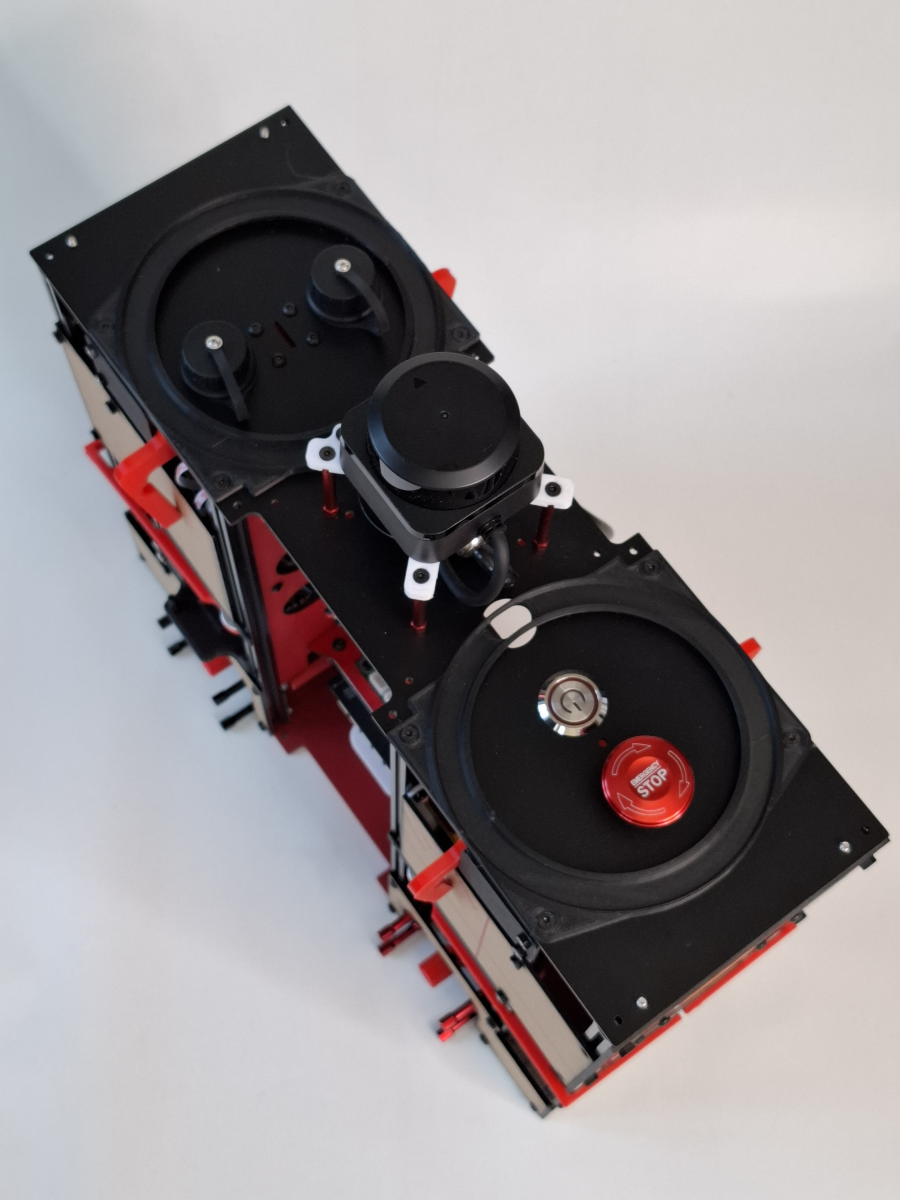
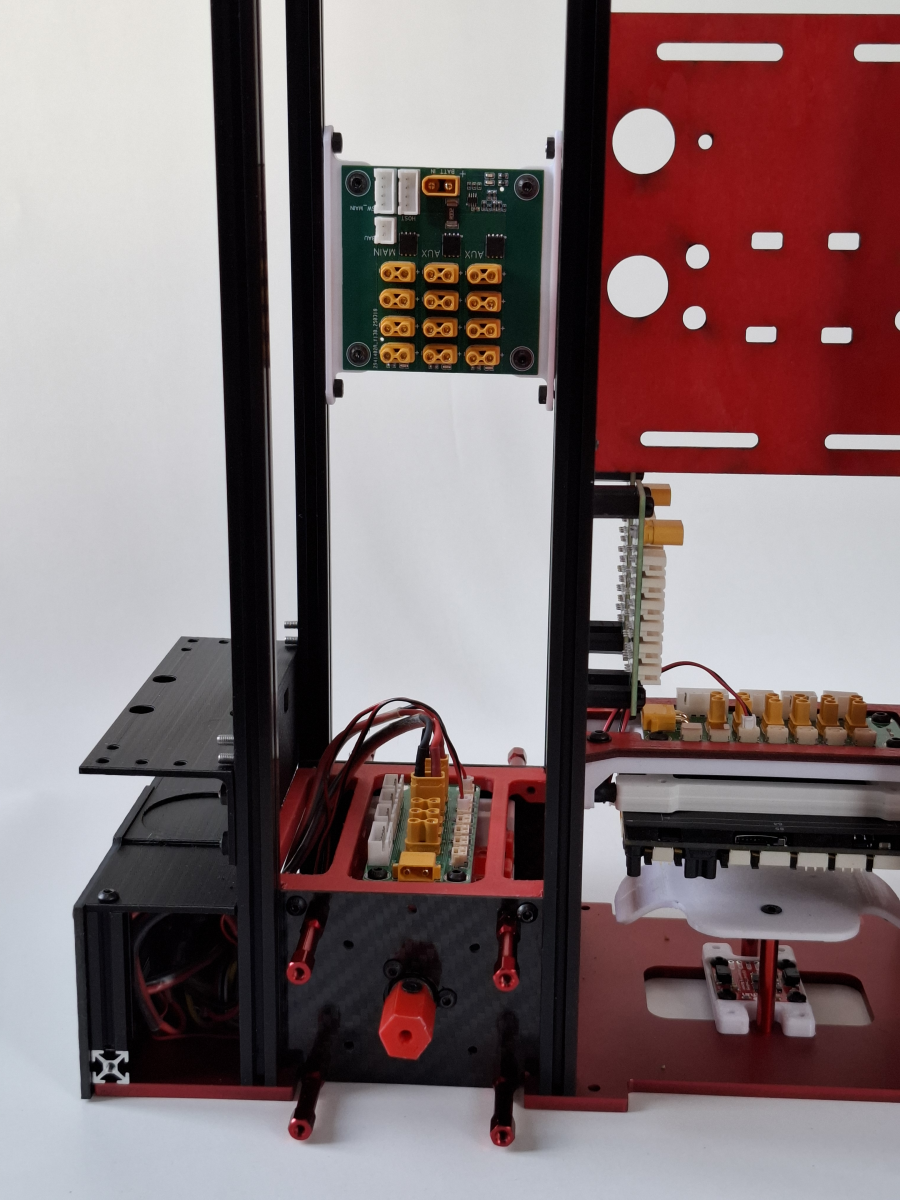
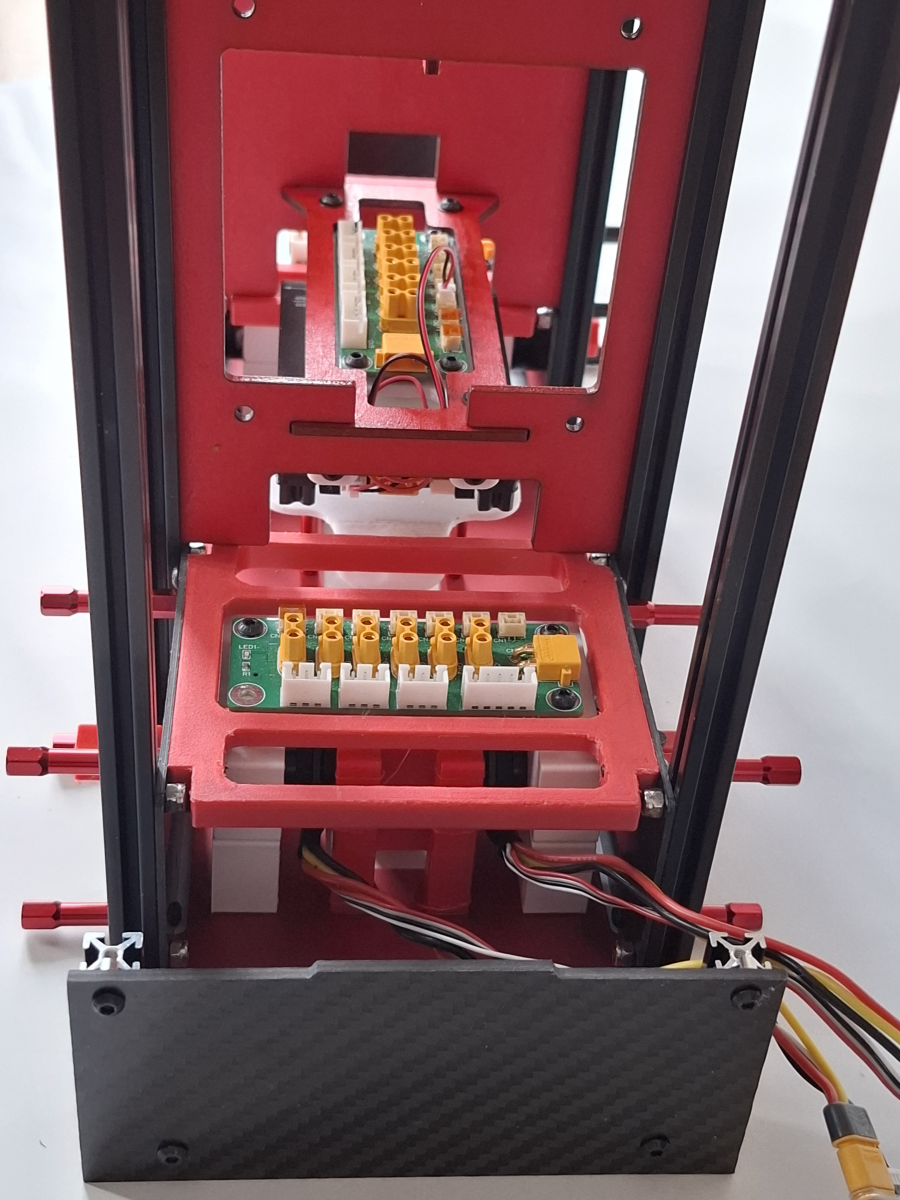
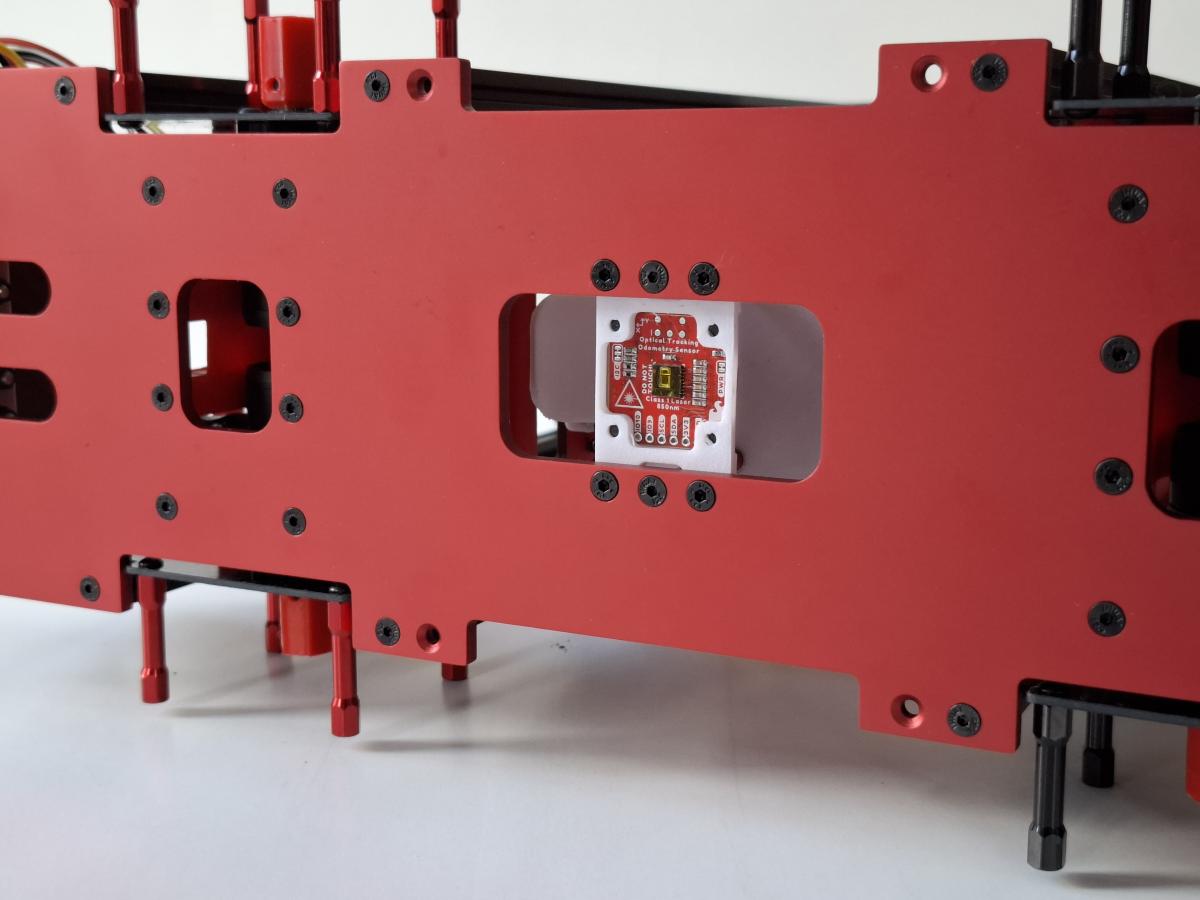
On ajoute les capteurs habituels, ceinture et bretelles, LIDAR bas de localisation des bordures et OTOS :


En parallèle, on passe quelques nuits à faire des calculs dans tous les sens, et on abandonne le PID "position" au profit d'un algorithme S-Curve avec contrôle en Jerk, pour l'asservissement des moteurs. Les déplacements de la base sont fluides, ca pousse fort avec seulement deux moteurs DJI. Et on s'attend à avoir une précision de l'ordre du micromètre sur l'aire de jeu !
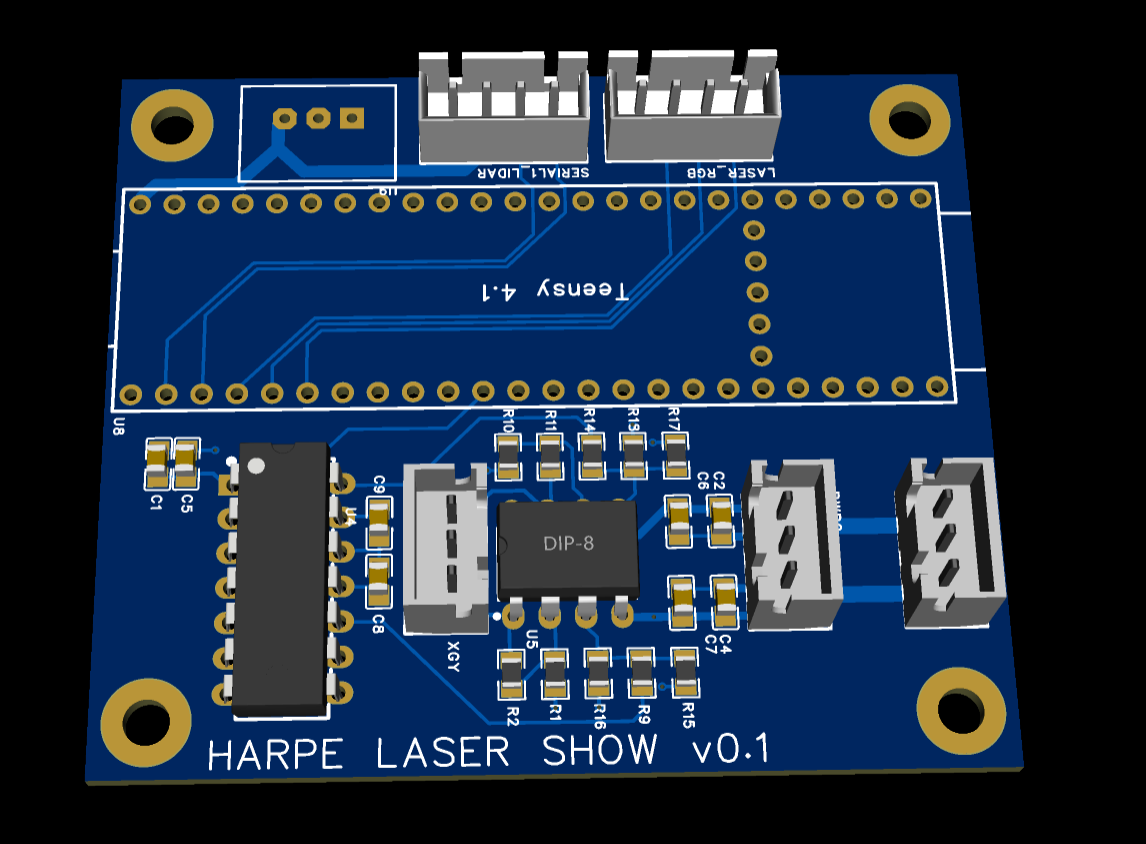
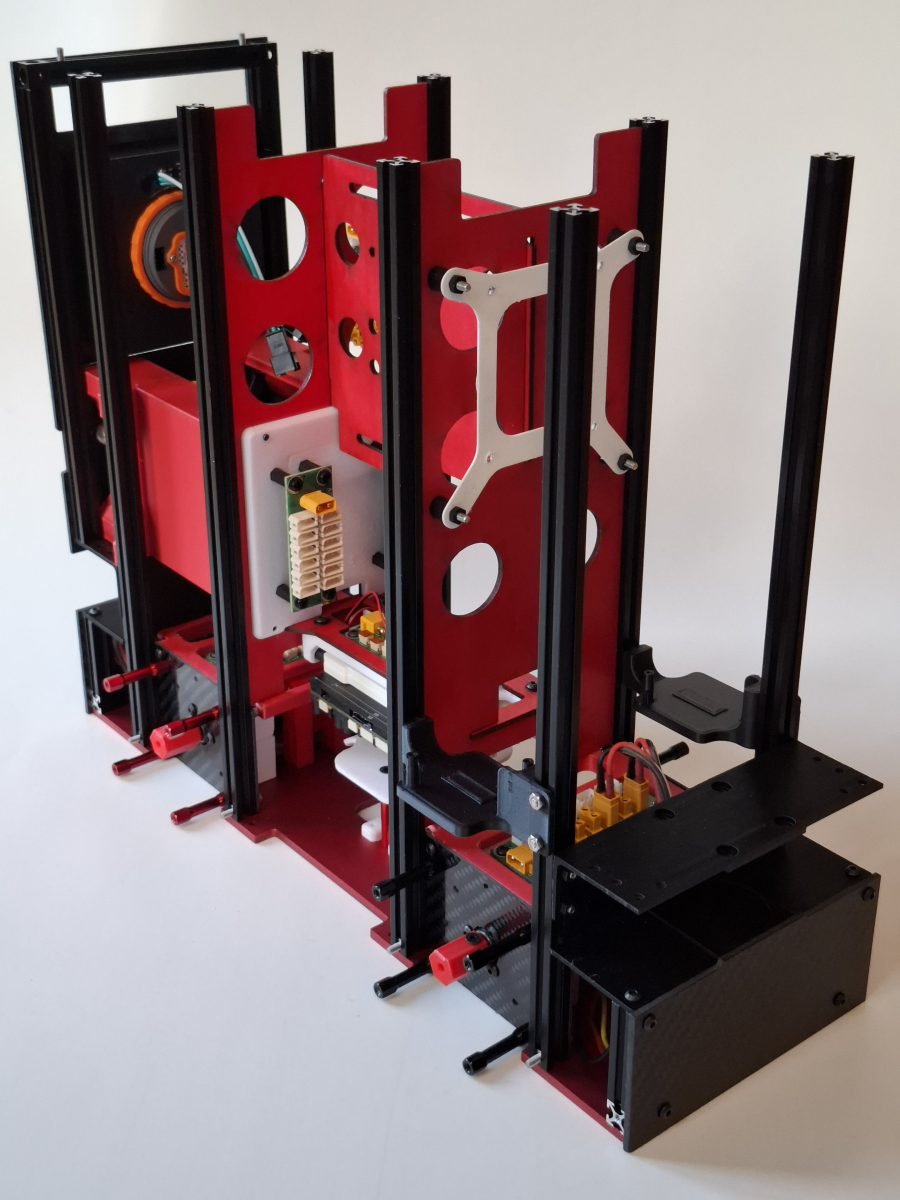
Alors, on avance la conception du robot et on passe au bloc central et aux actionneurs.


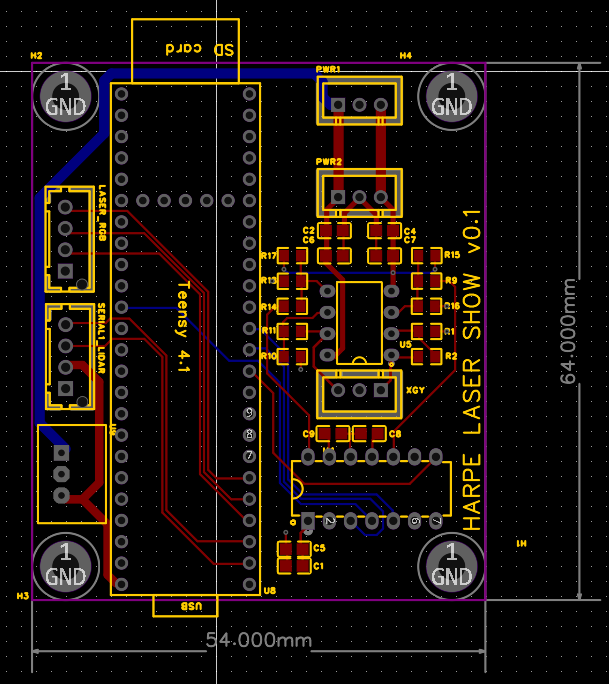
Le projet avance bien. On commence à faire l'électronique et le logiciel. L'idée de faire une smart pompe se concrétise (c'est une autre histoire parallèle) !


Et puis le doute s'installe .... on commence à regretter la navigation en mode holonome !
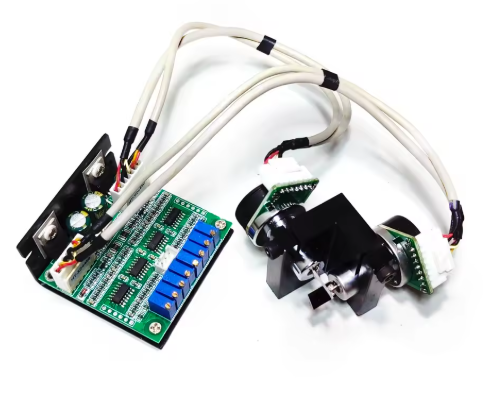
Dans le stock de composants, on a deux moteurs DJI orphelins ... on n'allait pas les recycler juste pour faire des ascenseurs !
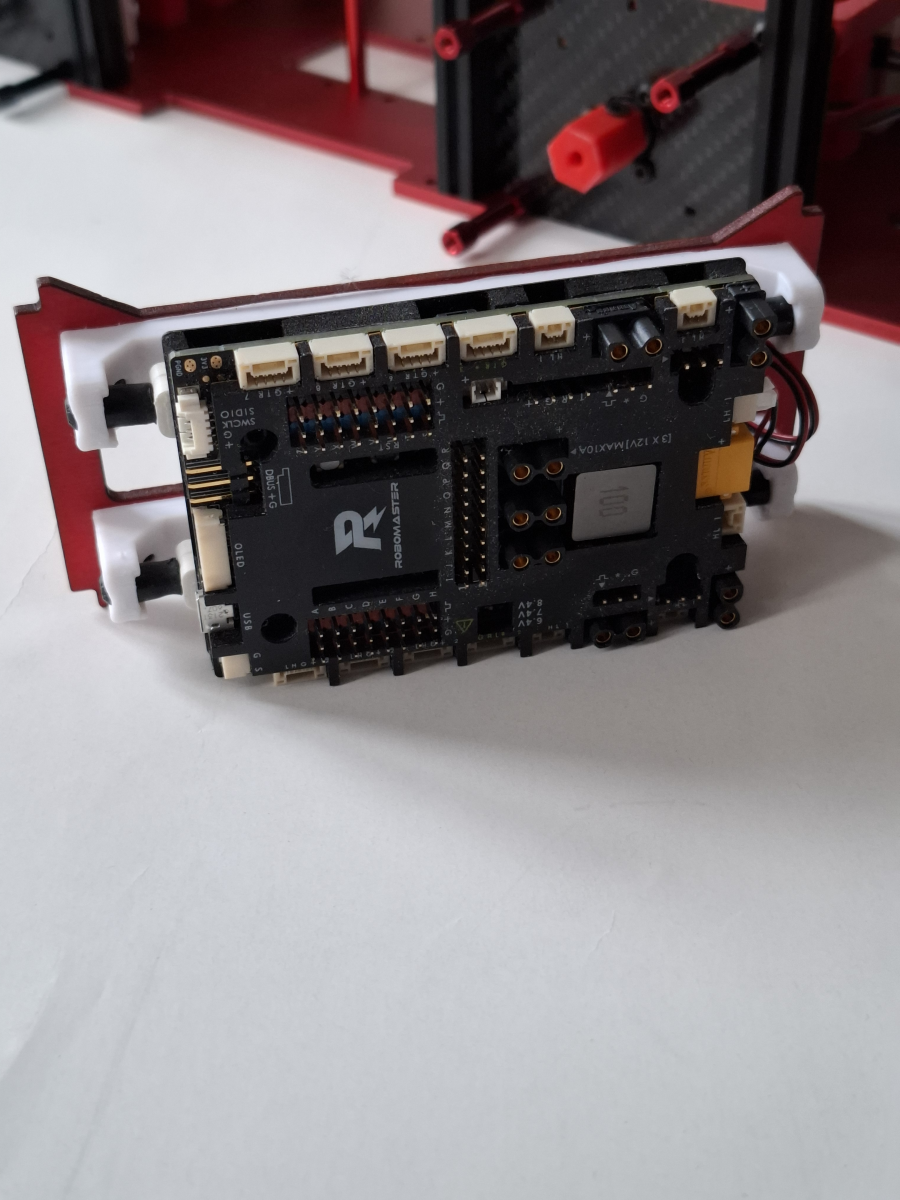
En fouillant, je tombe la dessus :

Cette piste avait été évoquée il y a longtemps dans l'équipe, mais on avait préféré le Mecanum ces dernières années.
**RIP** le 2WD pour 2026.
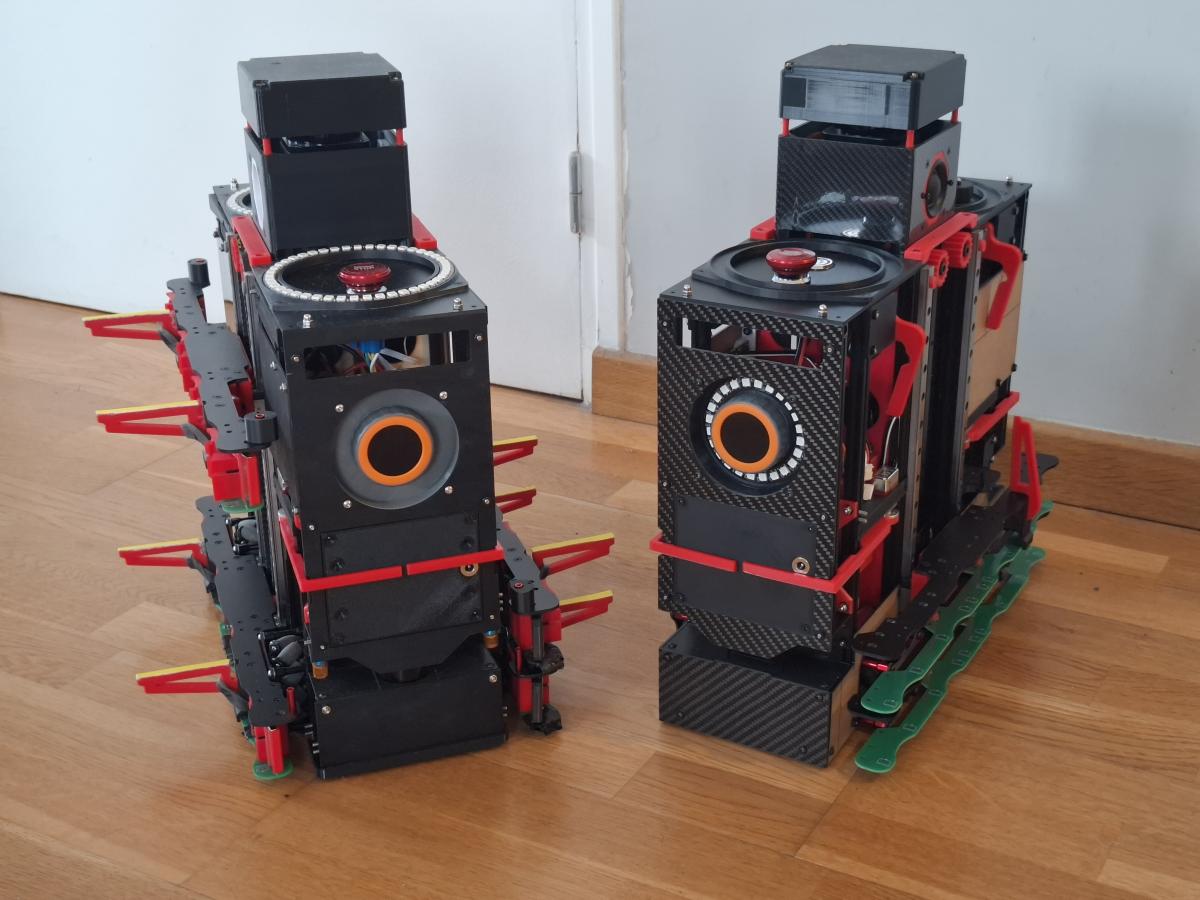
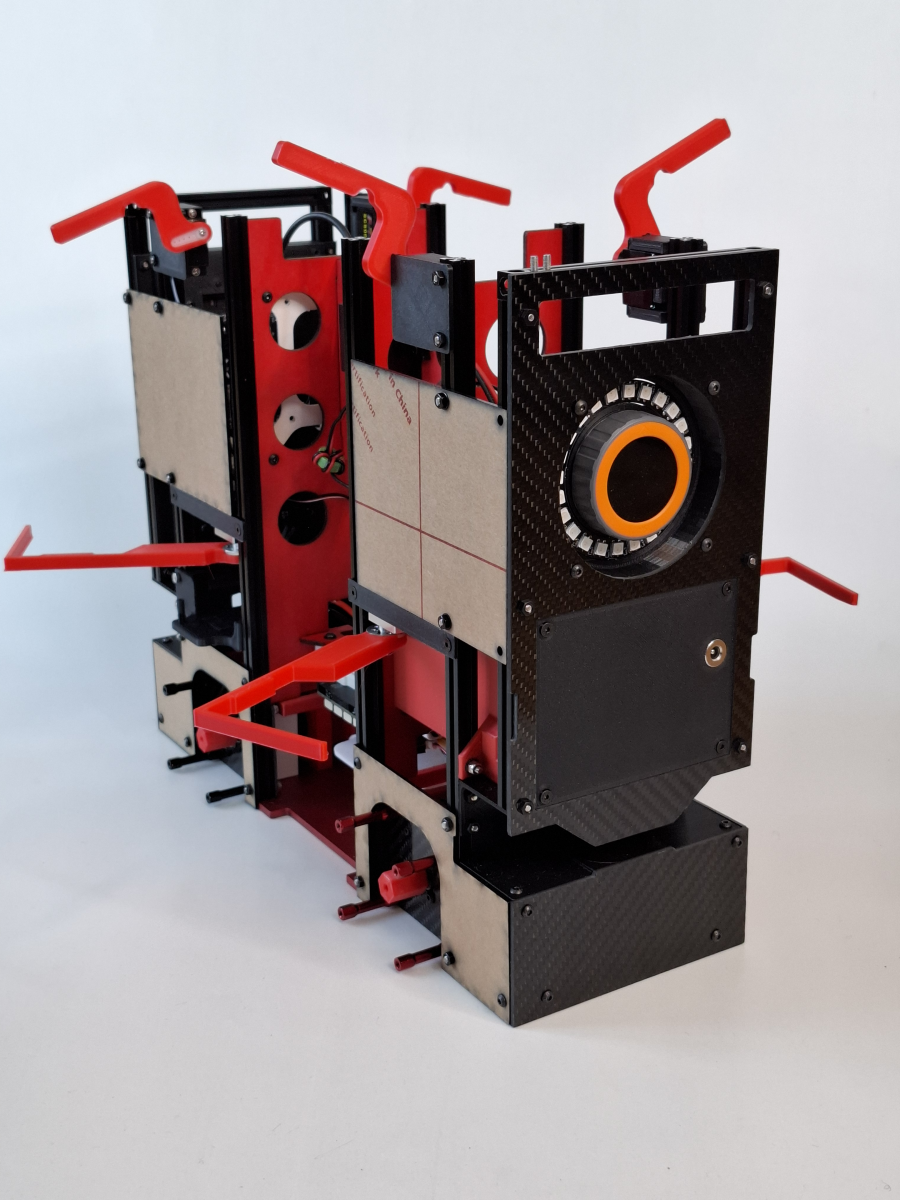
On rempile pour la Team Holonome. C'est parti pour un nouveau châssis : un 4x4 omniwheel CARDINAL.
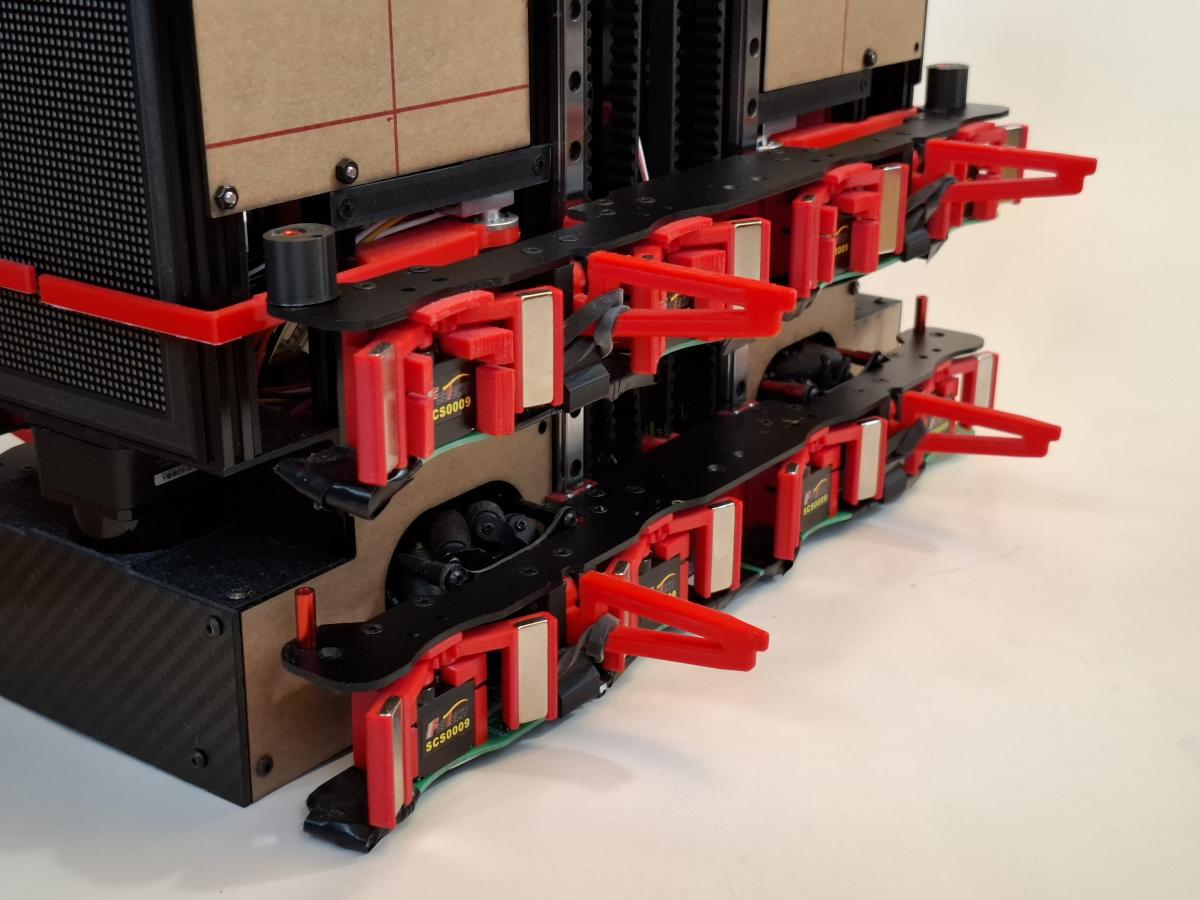
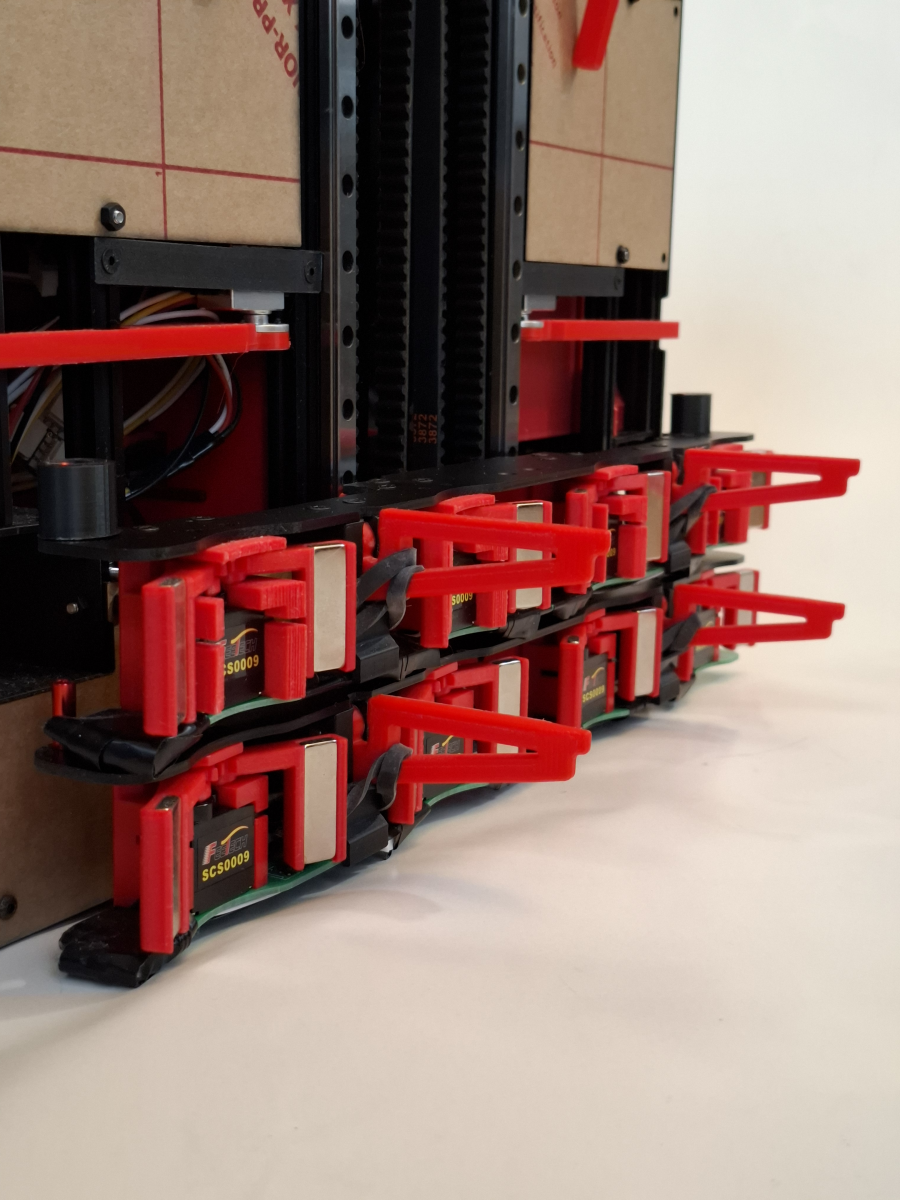
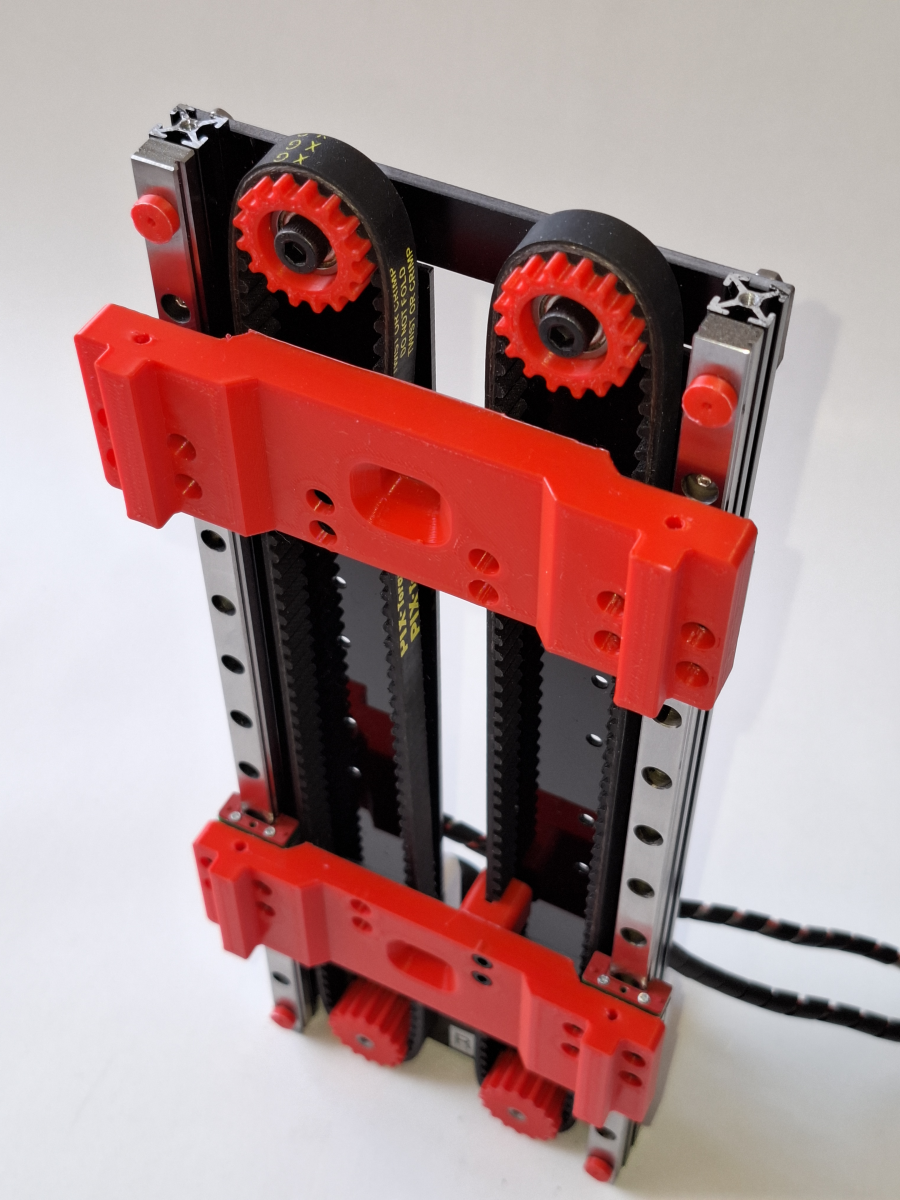
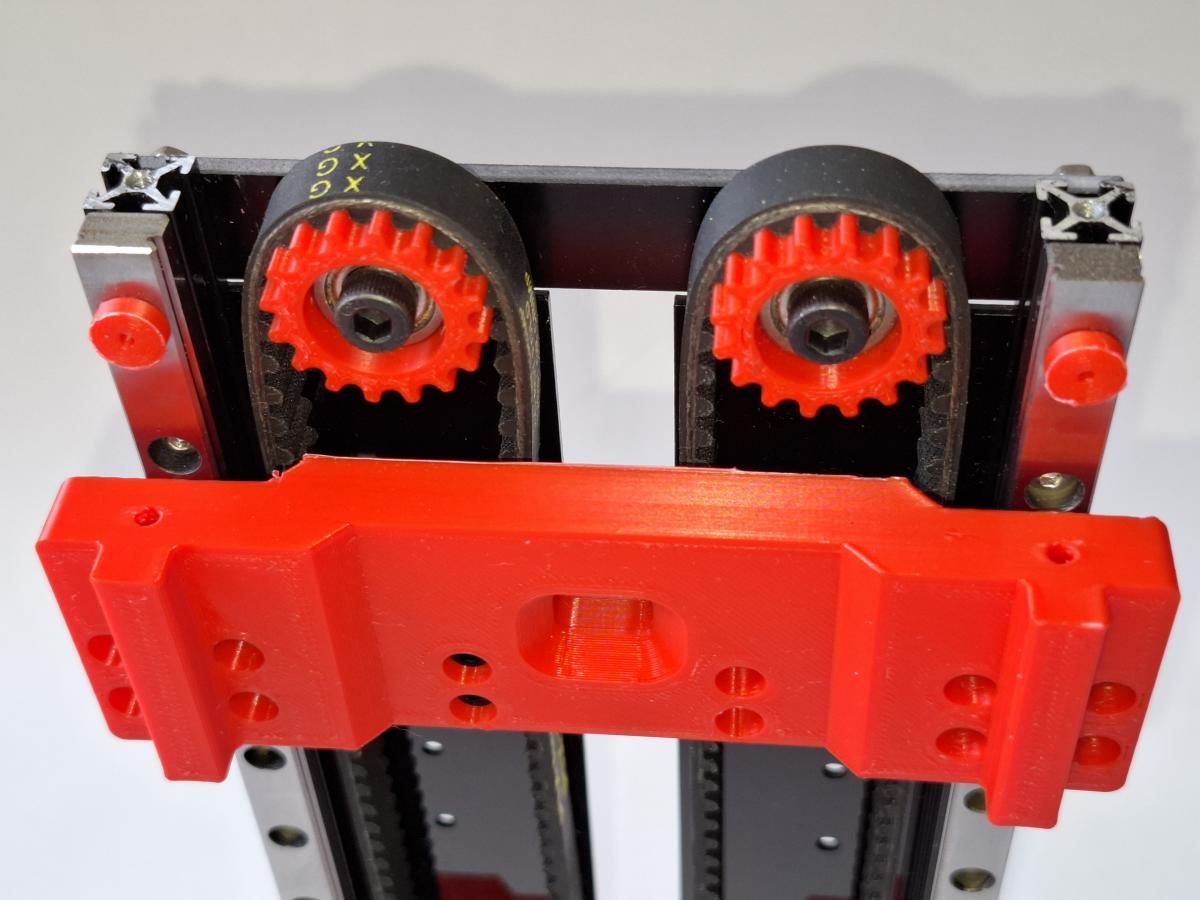
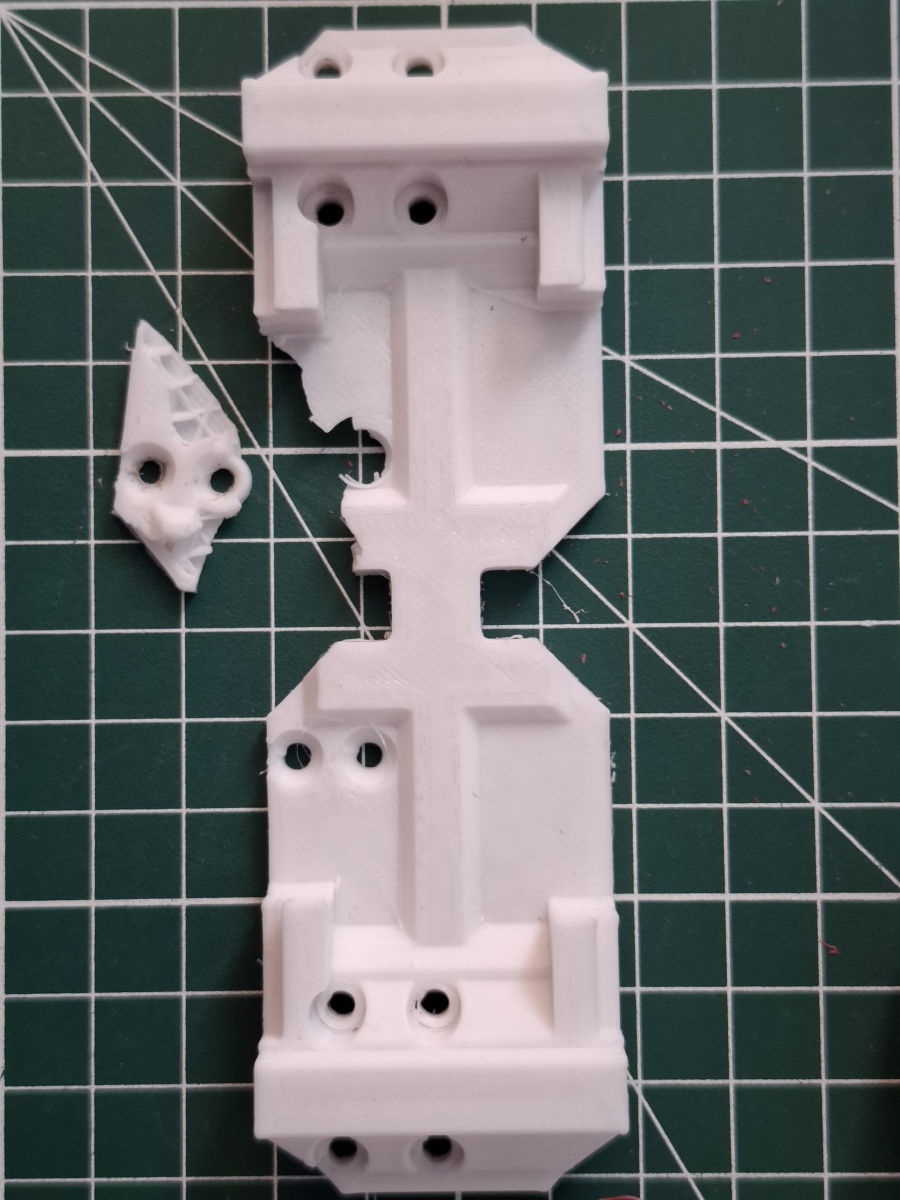
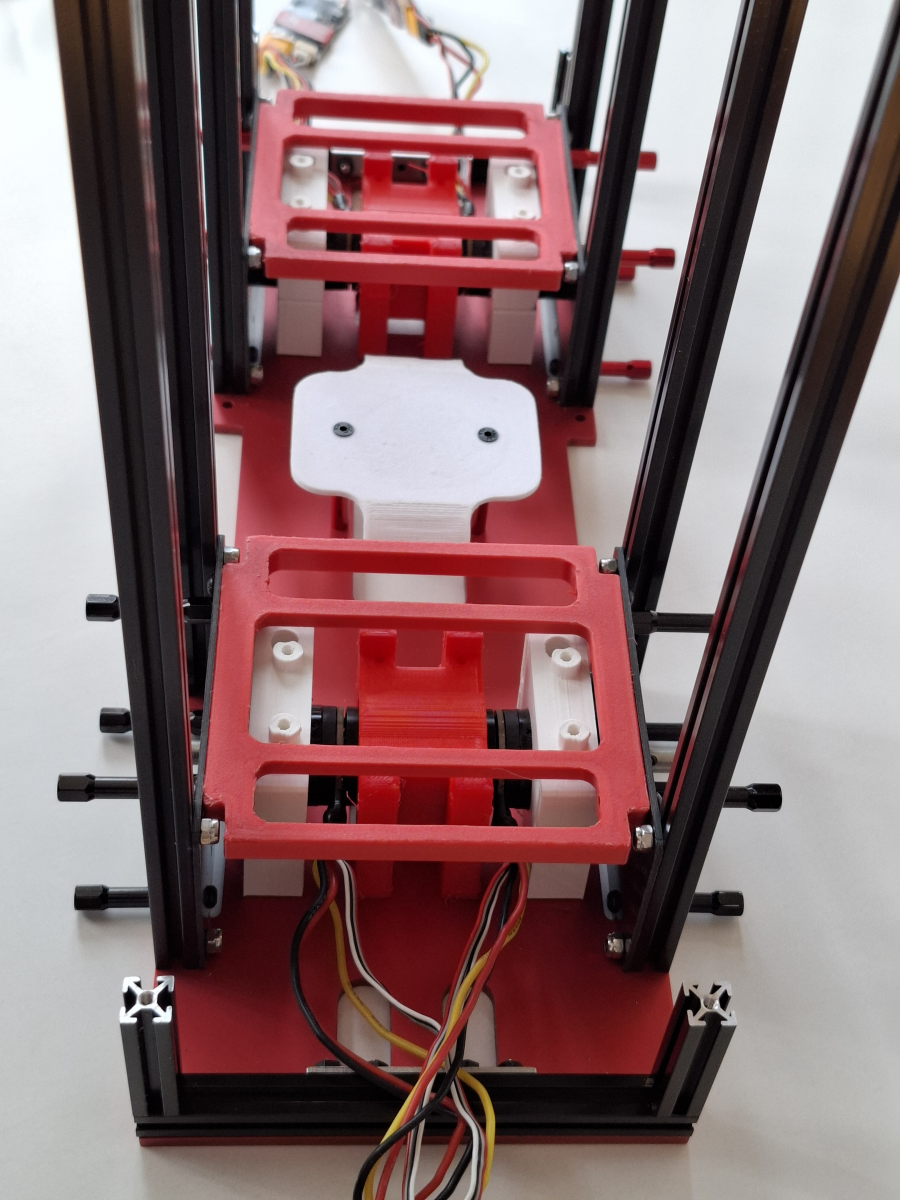
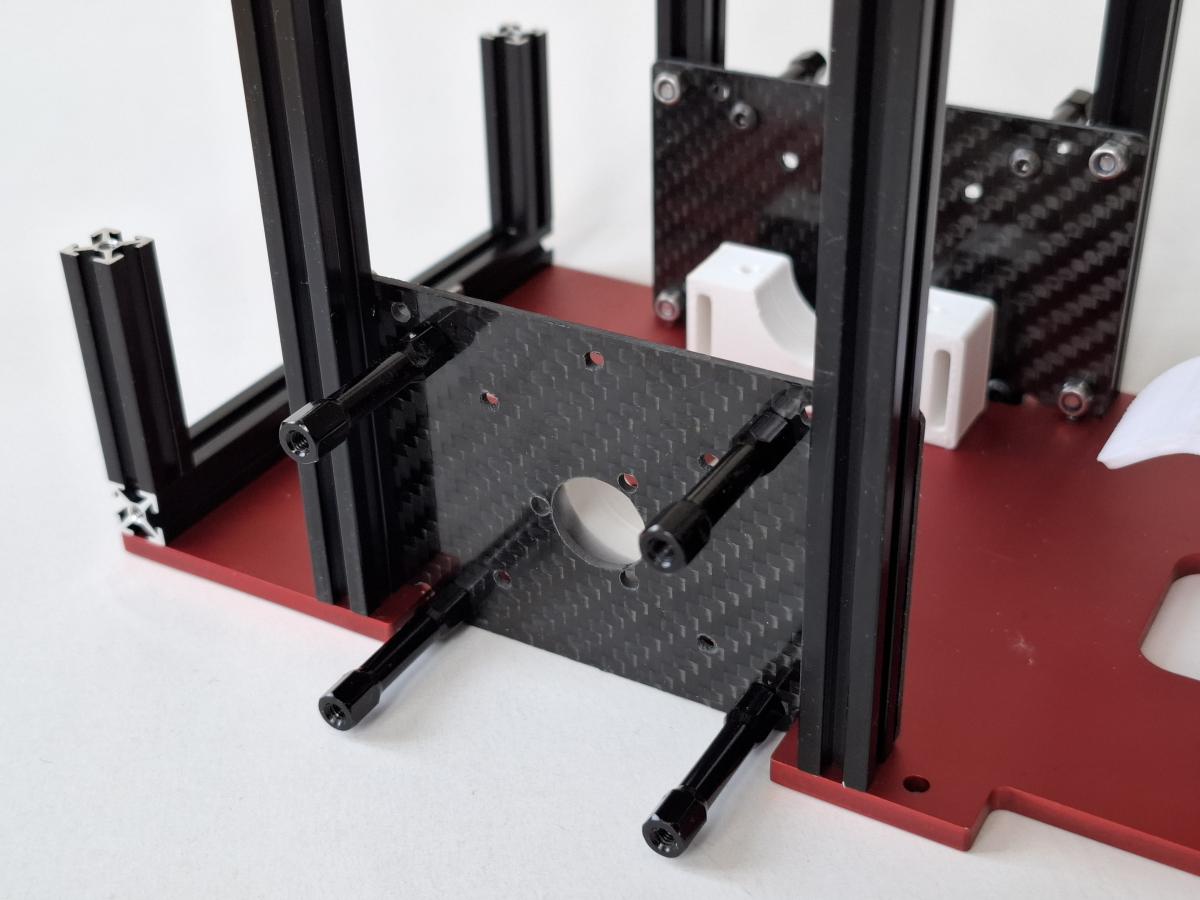
Avec 4 roues, il faut gérer la suspension, et là on n'a plus le temps de réfléchir, on fait simple comme d'habitude (blague) :


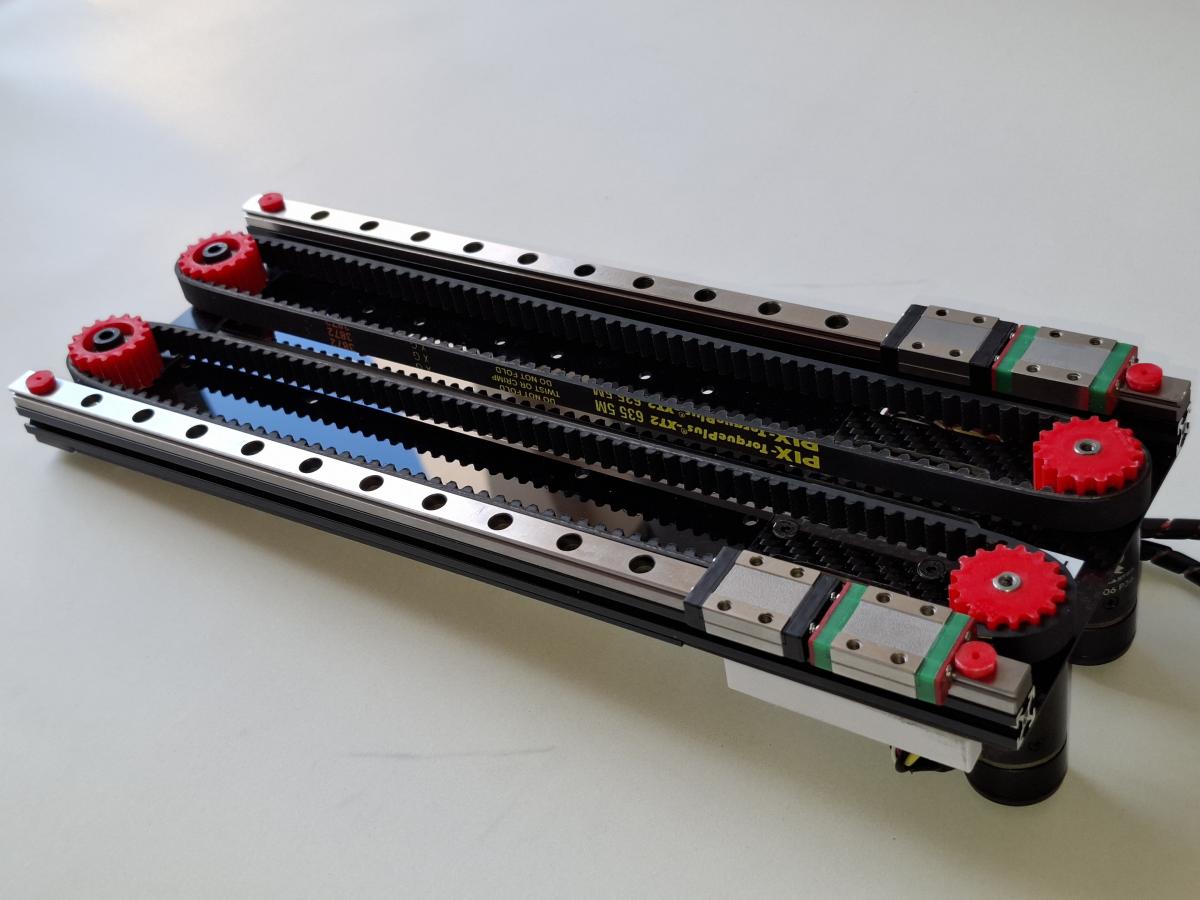
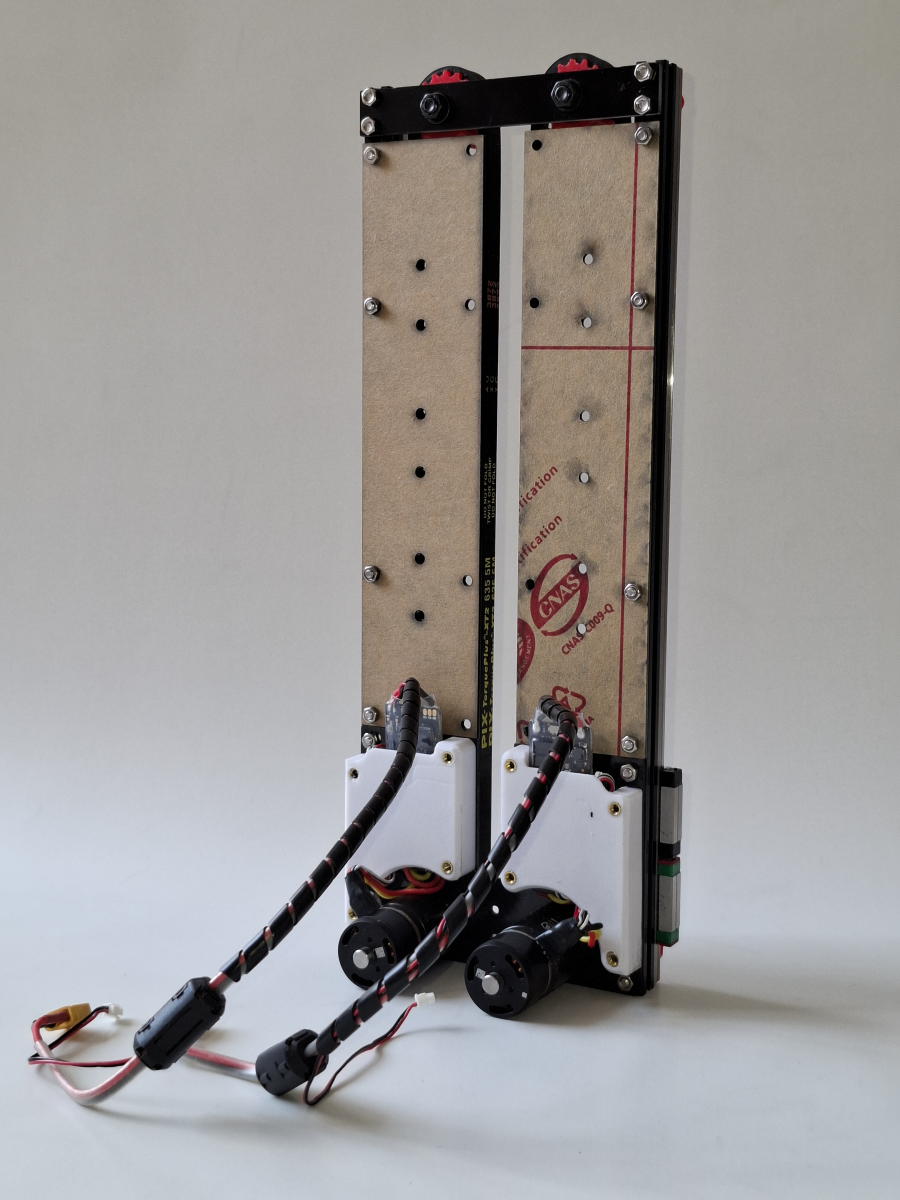
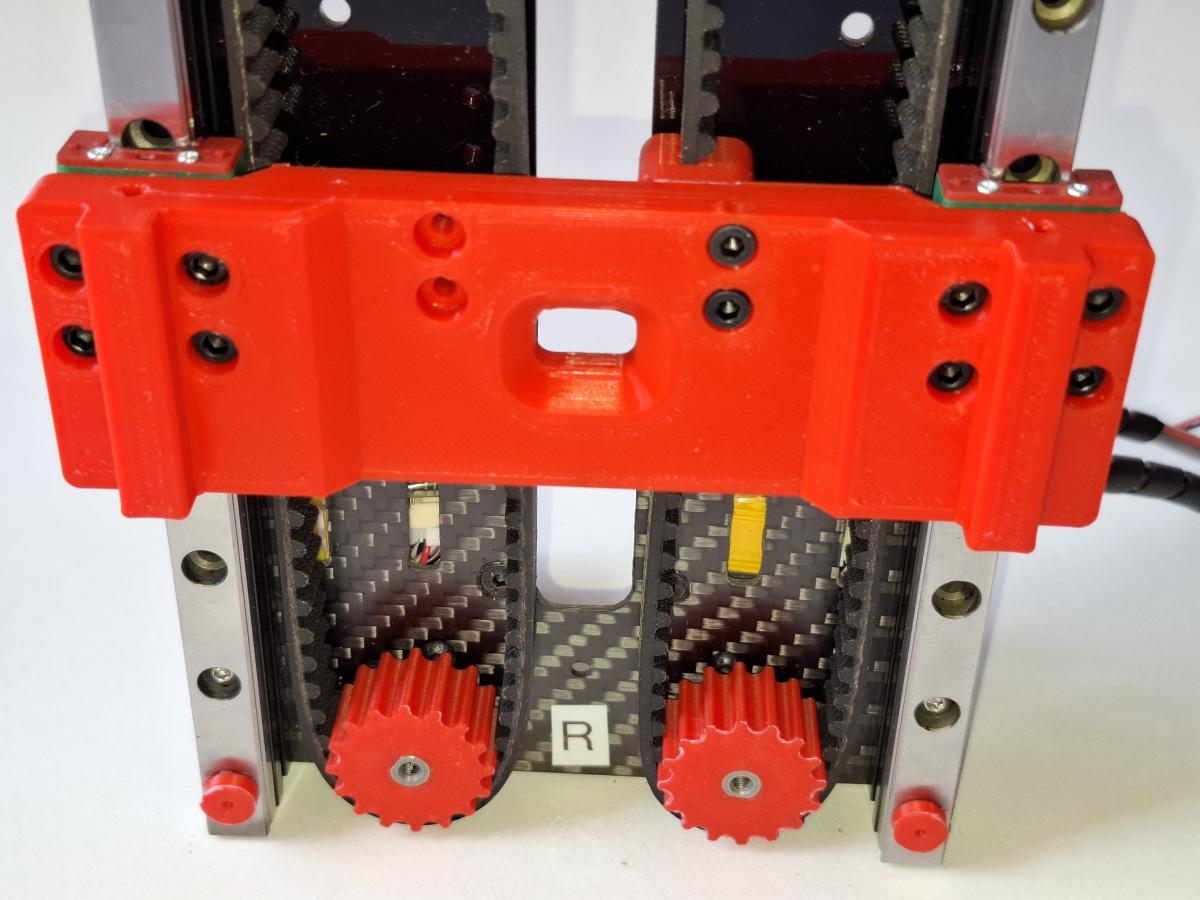
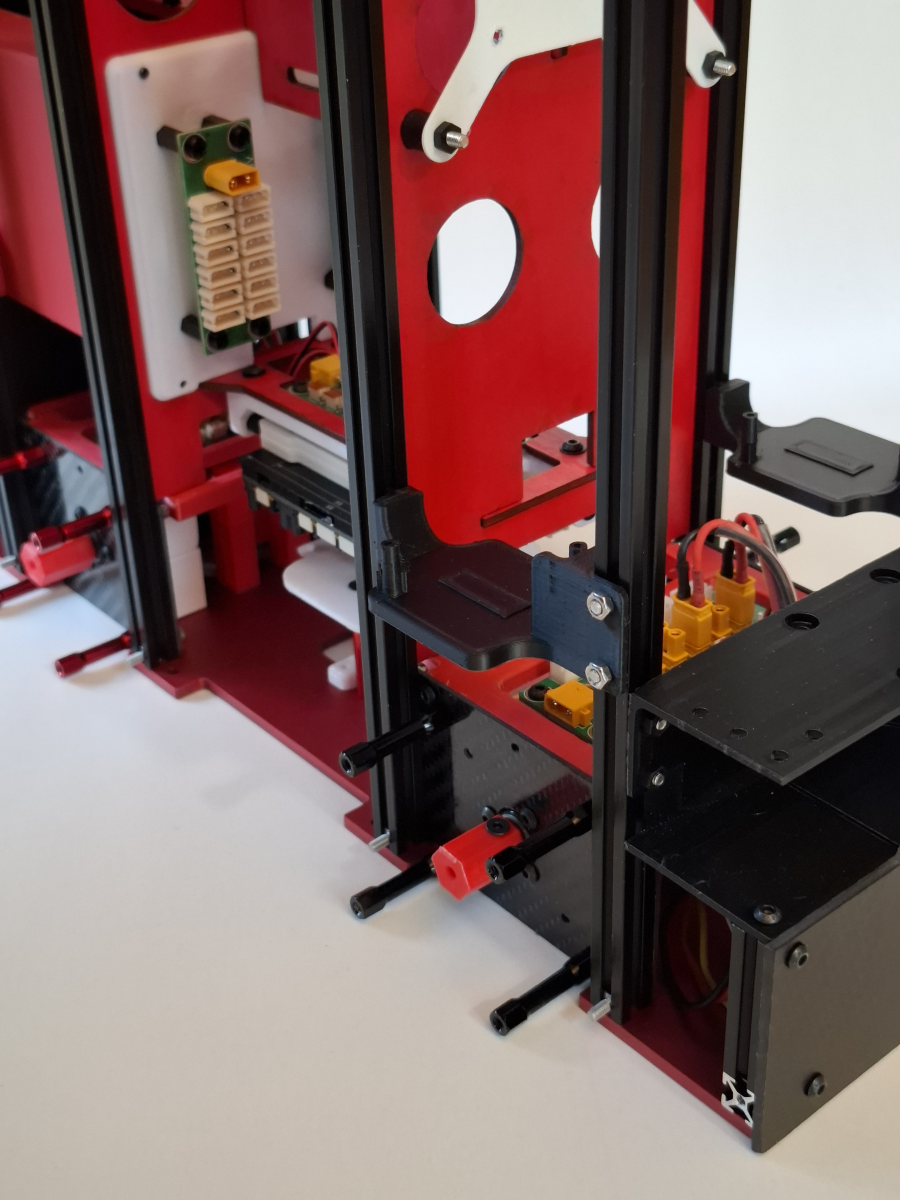
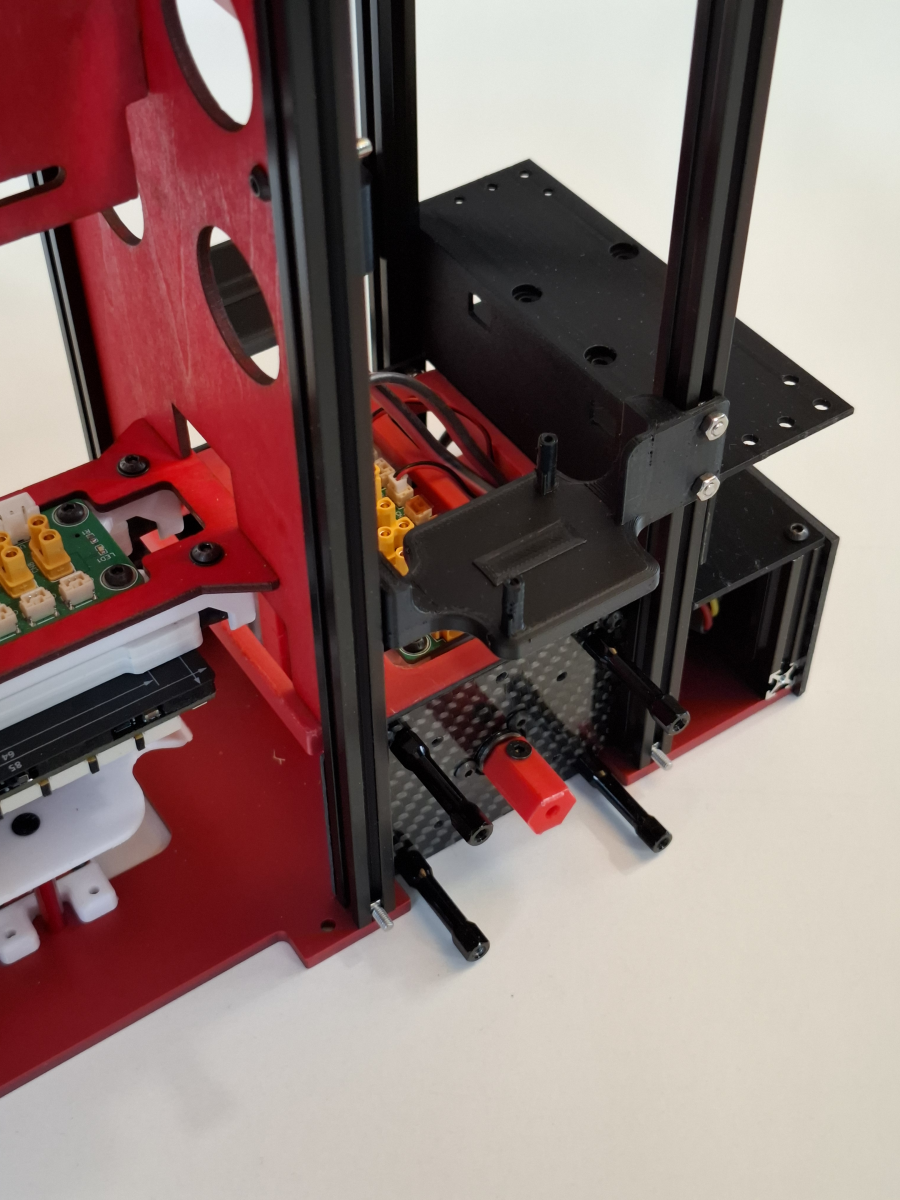
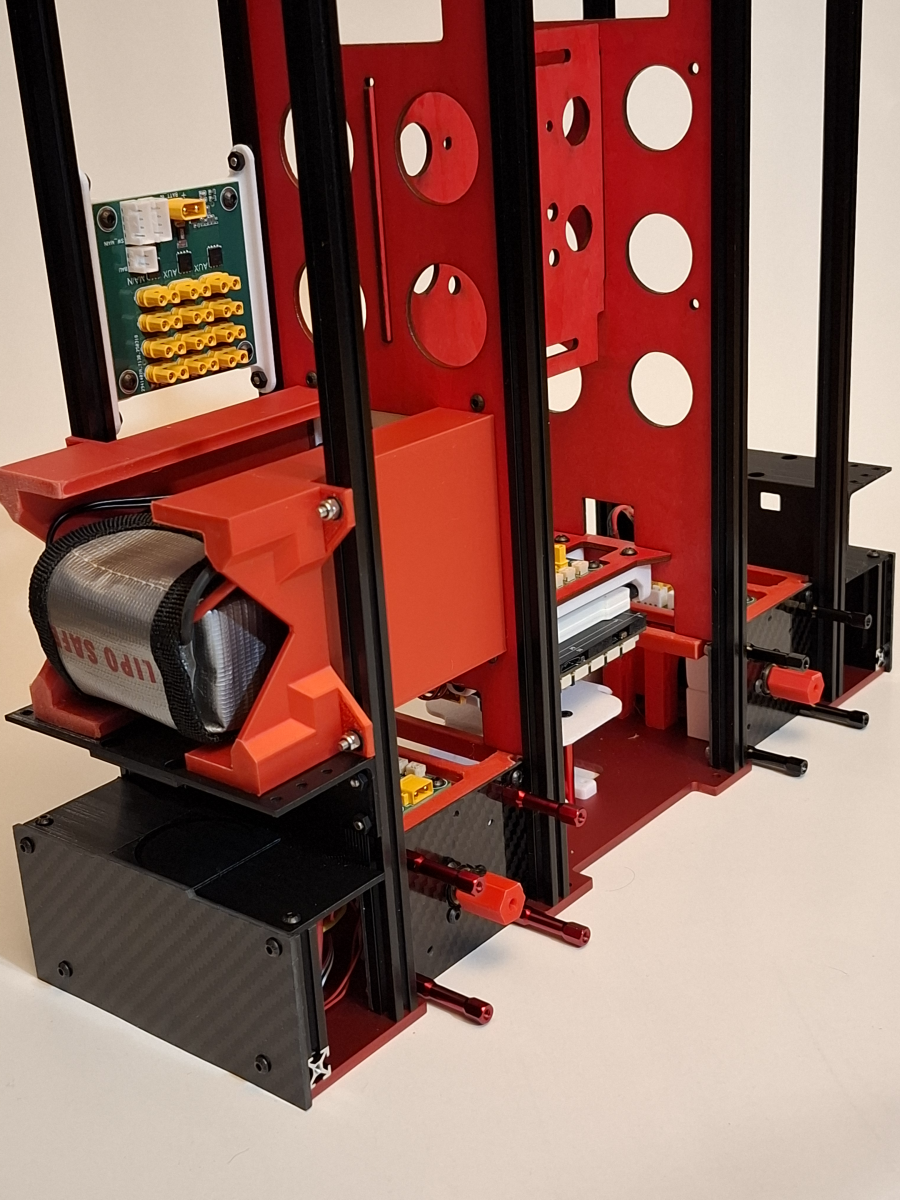
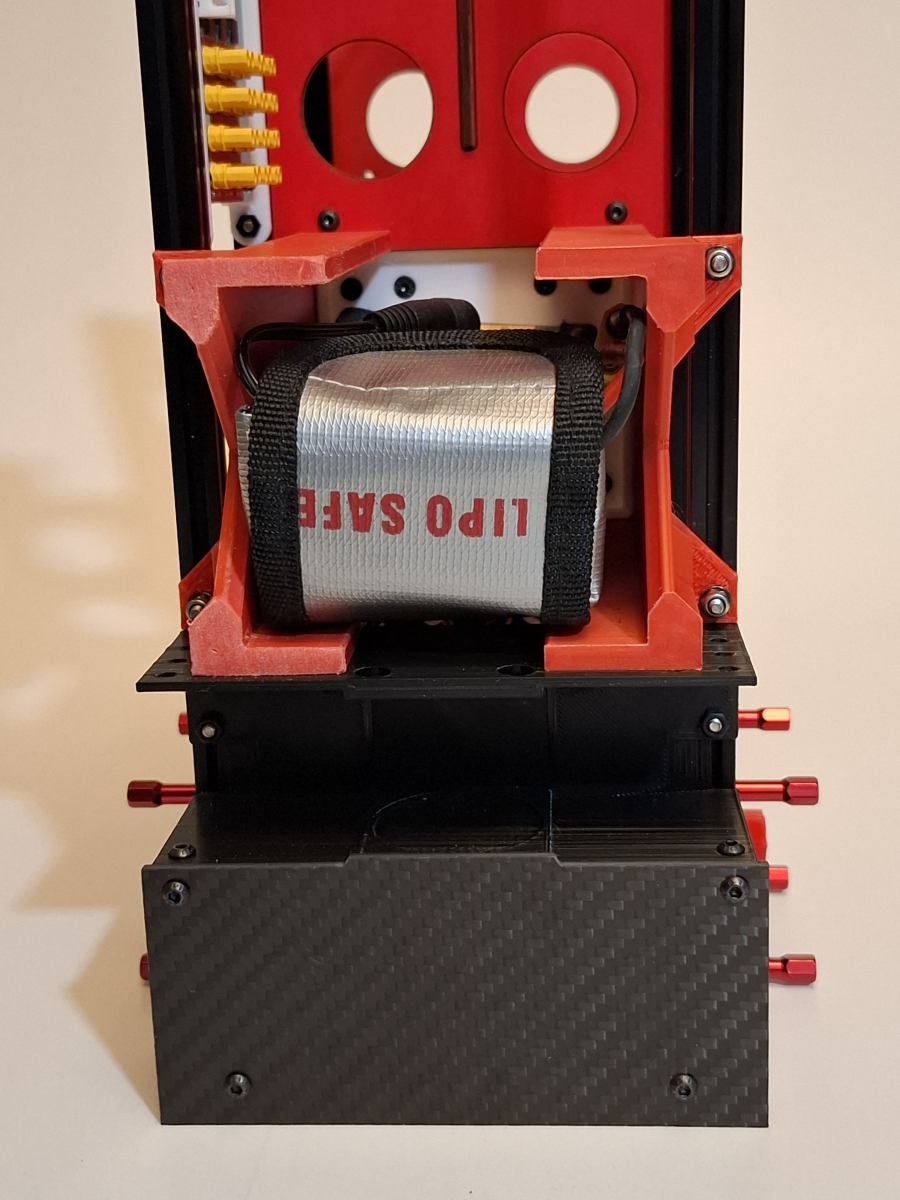
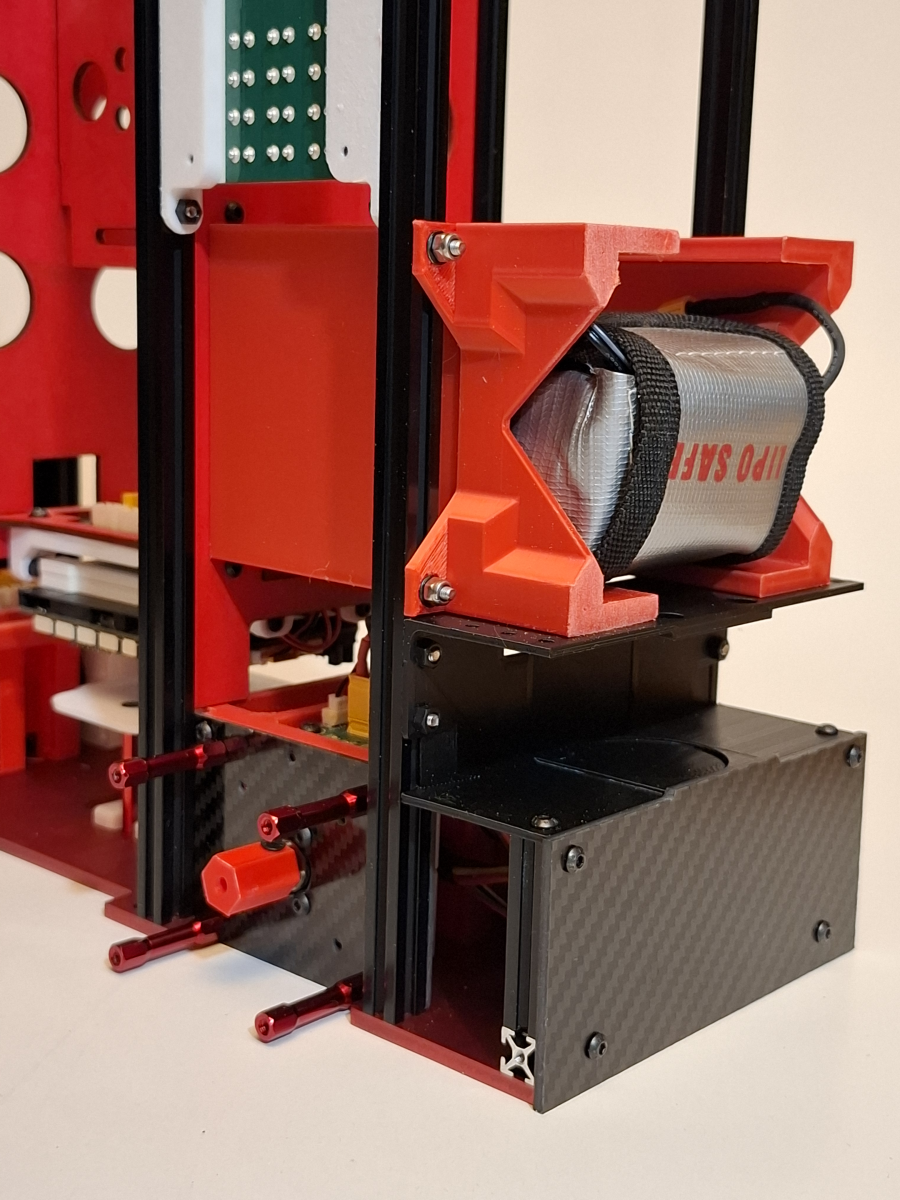
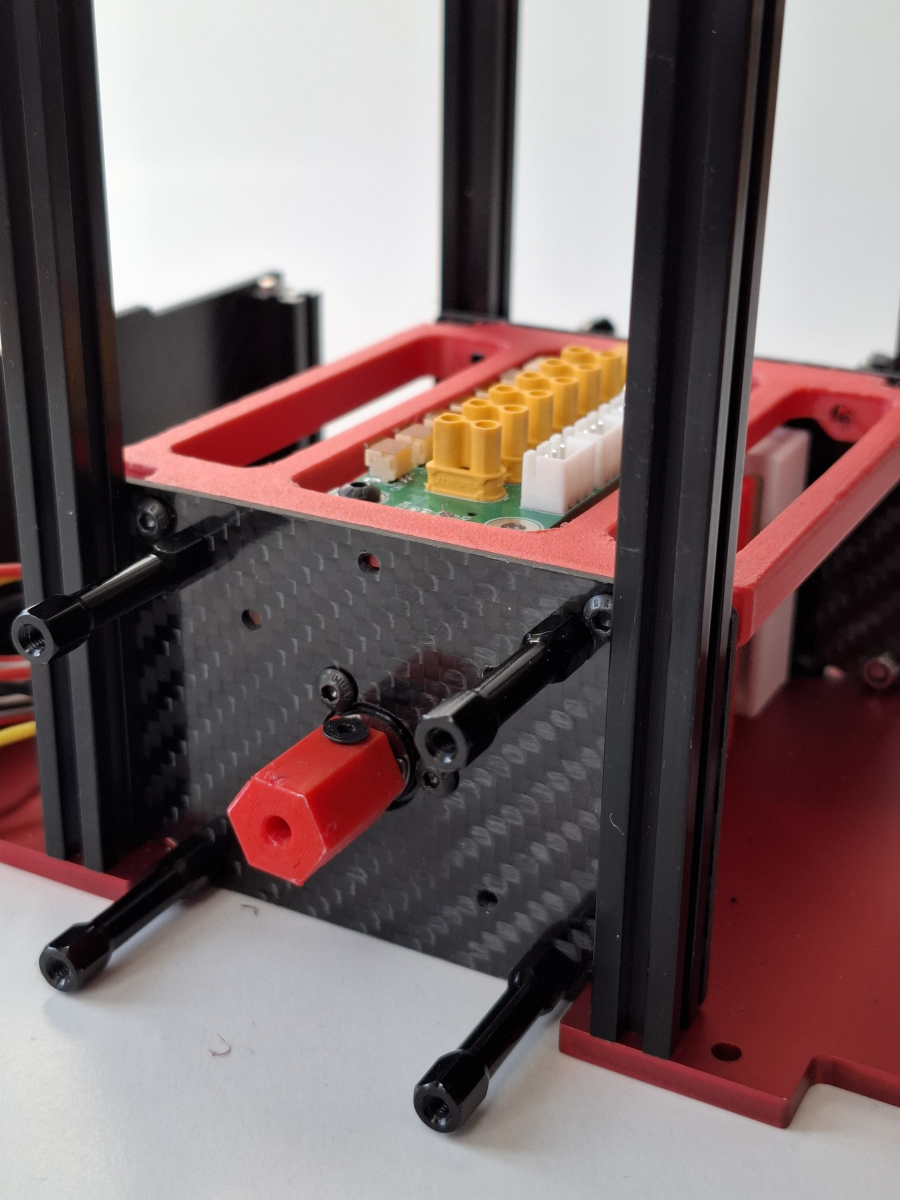
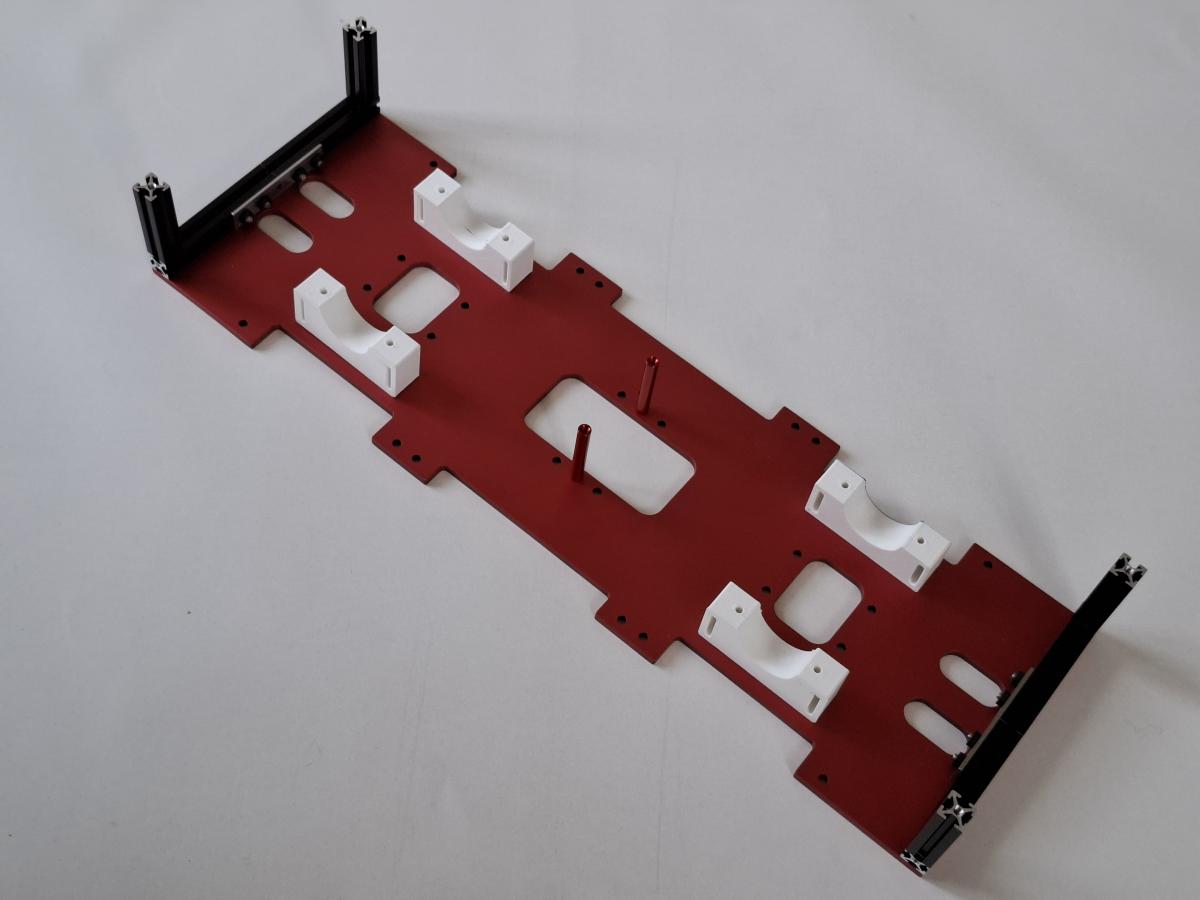
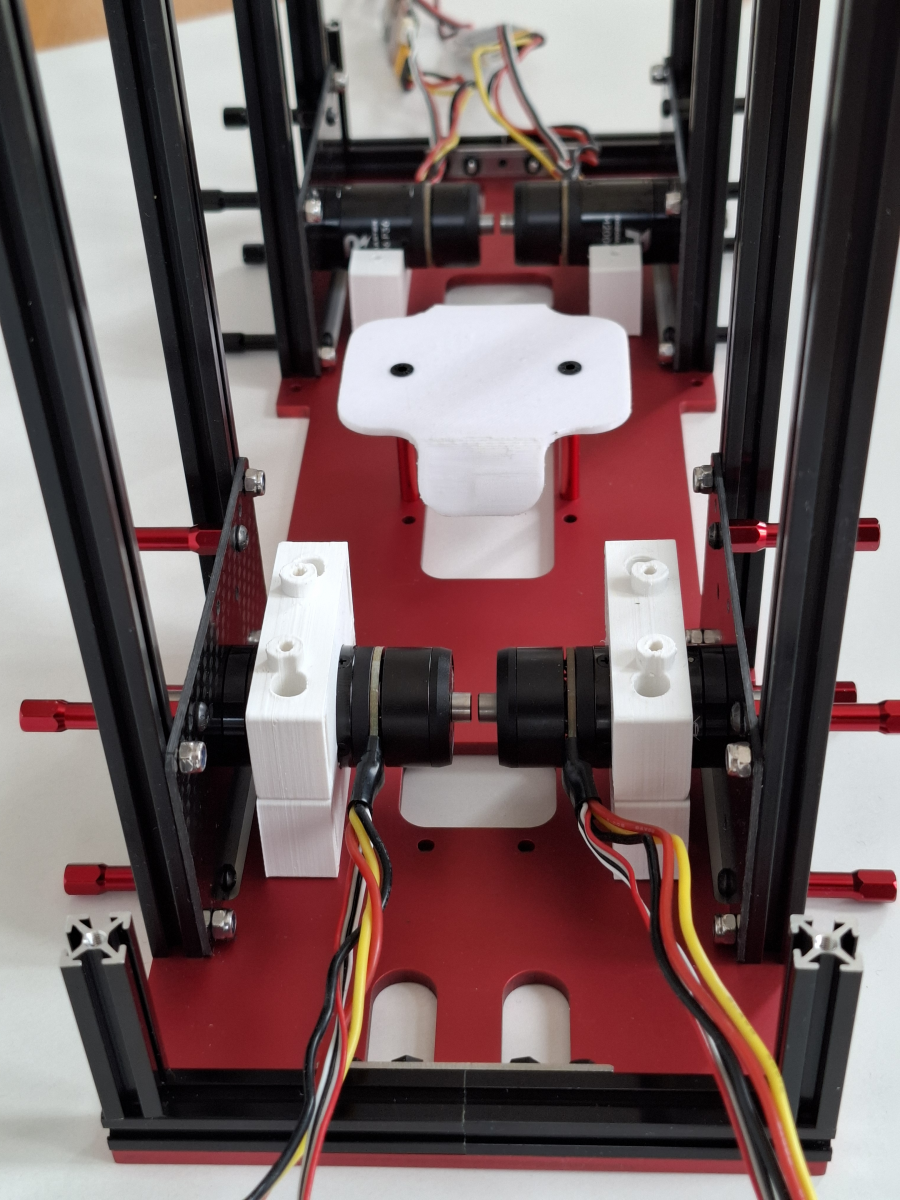
Tout le bloc moteur est monté sur deux rails linéaires de 40mm avec un amortisseur en silent blocks.


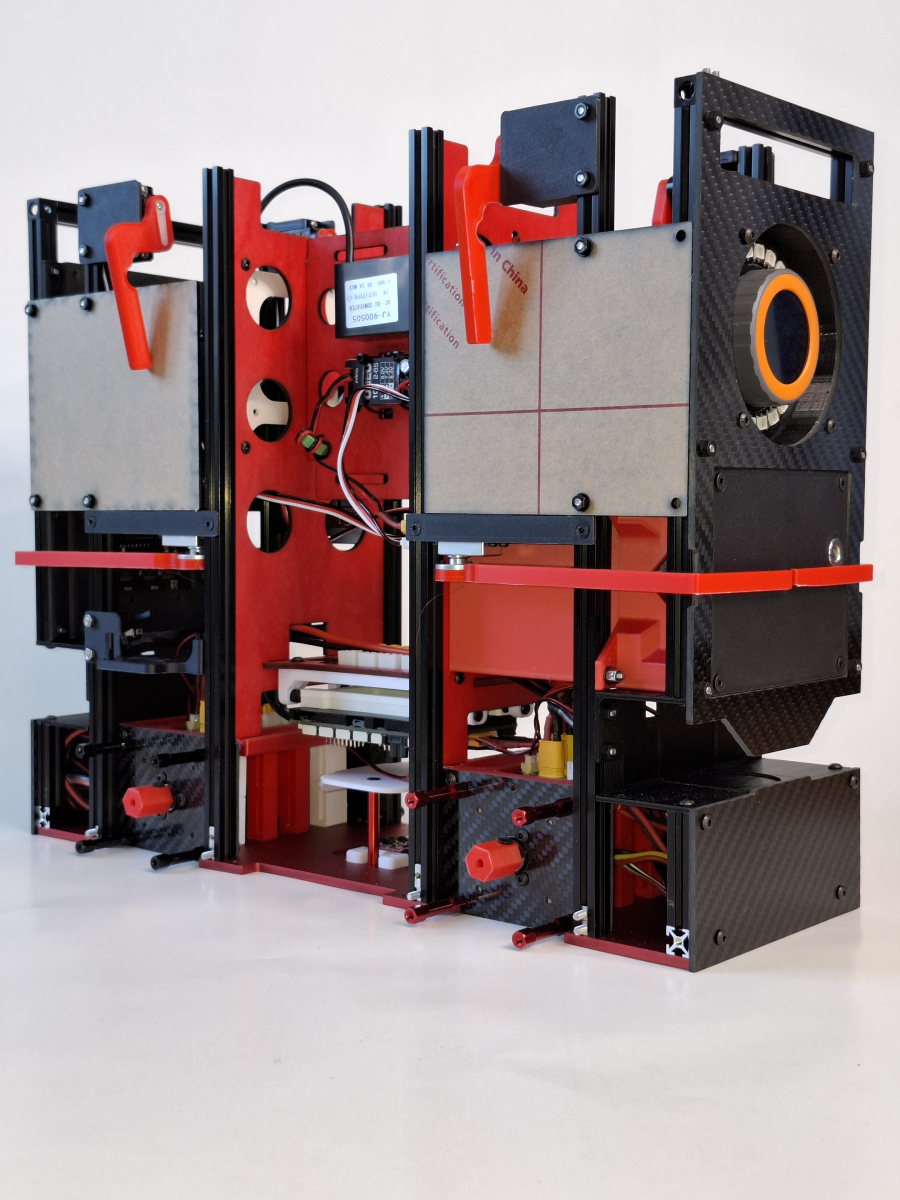
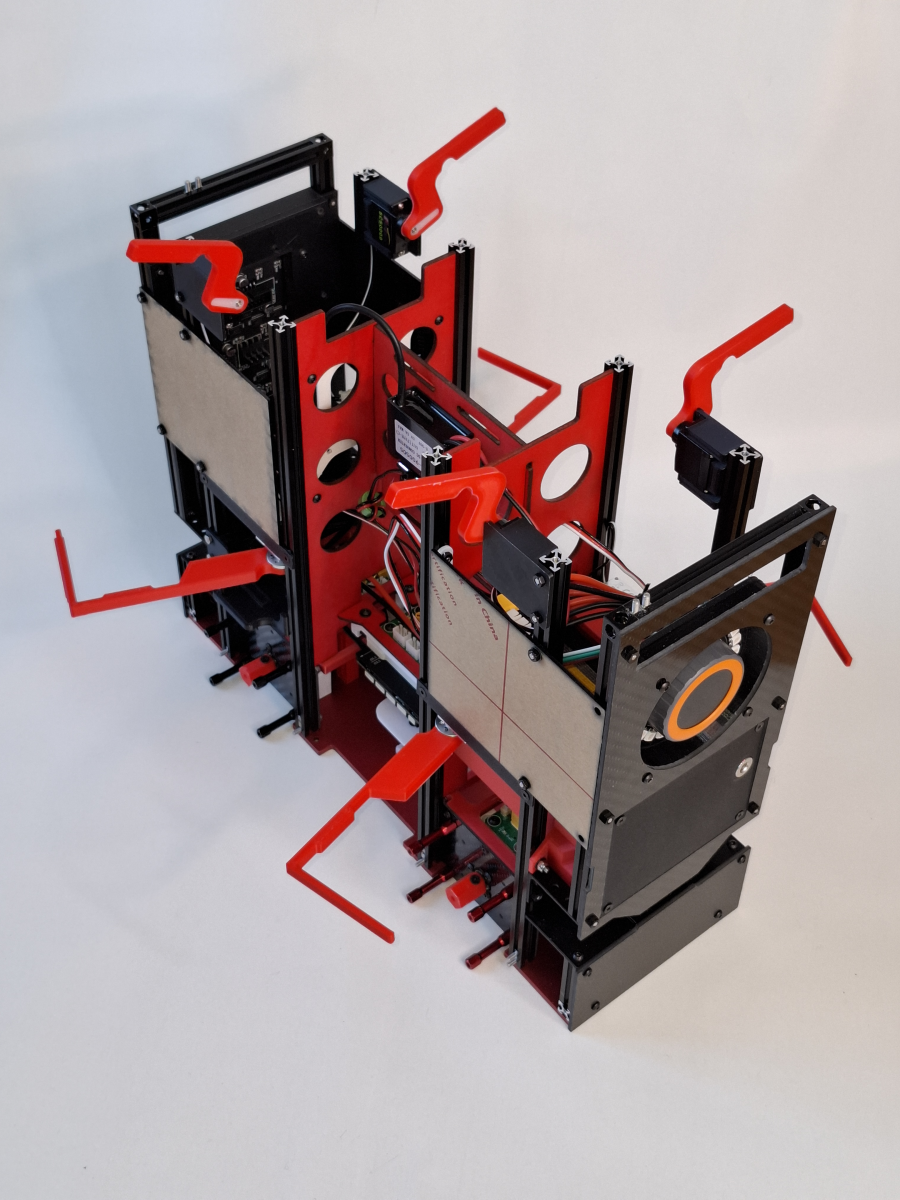
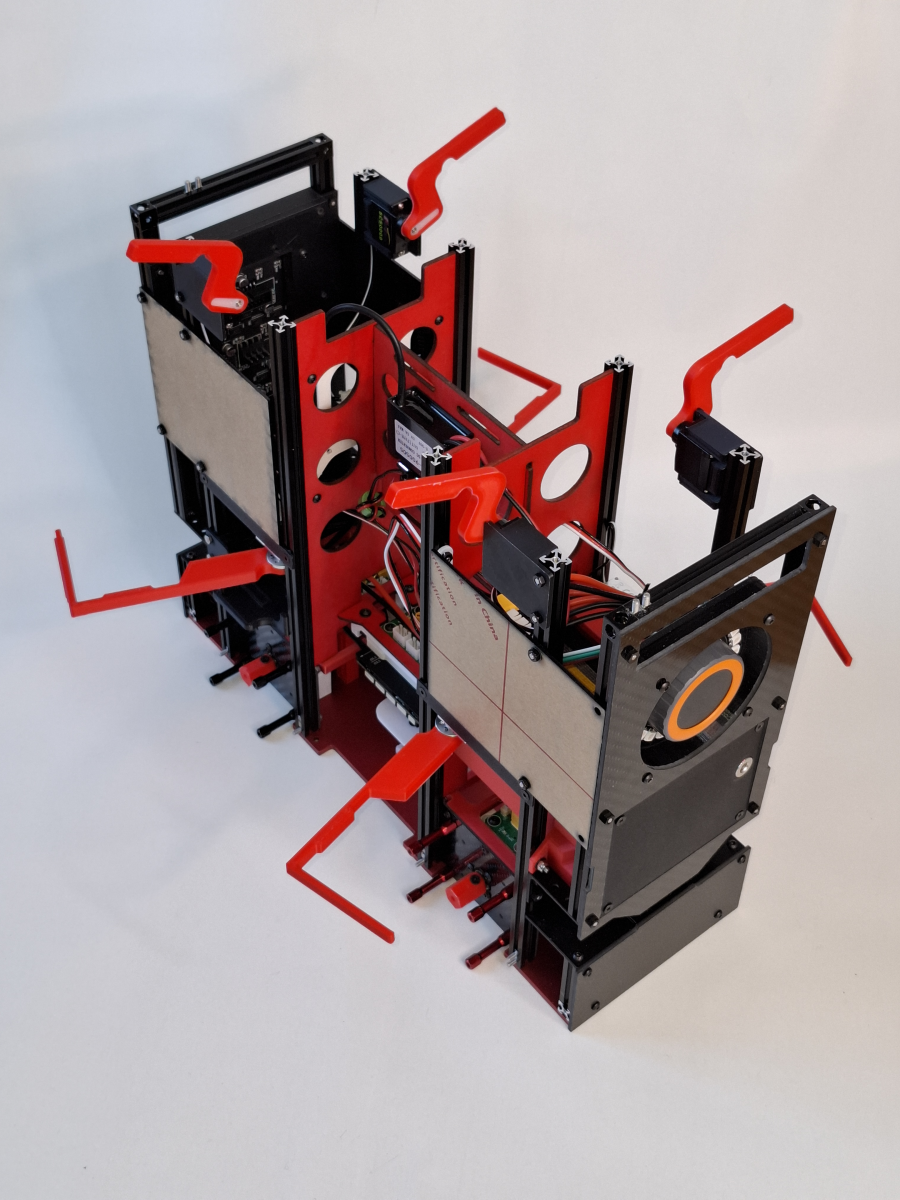
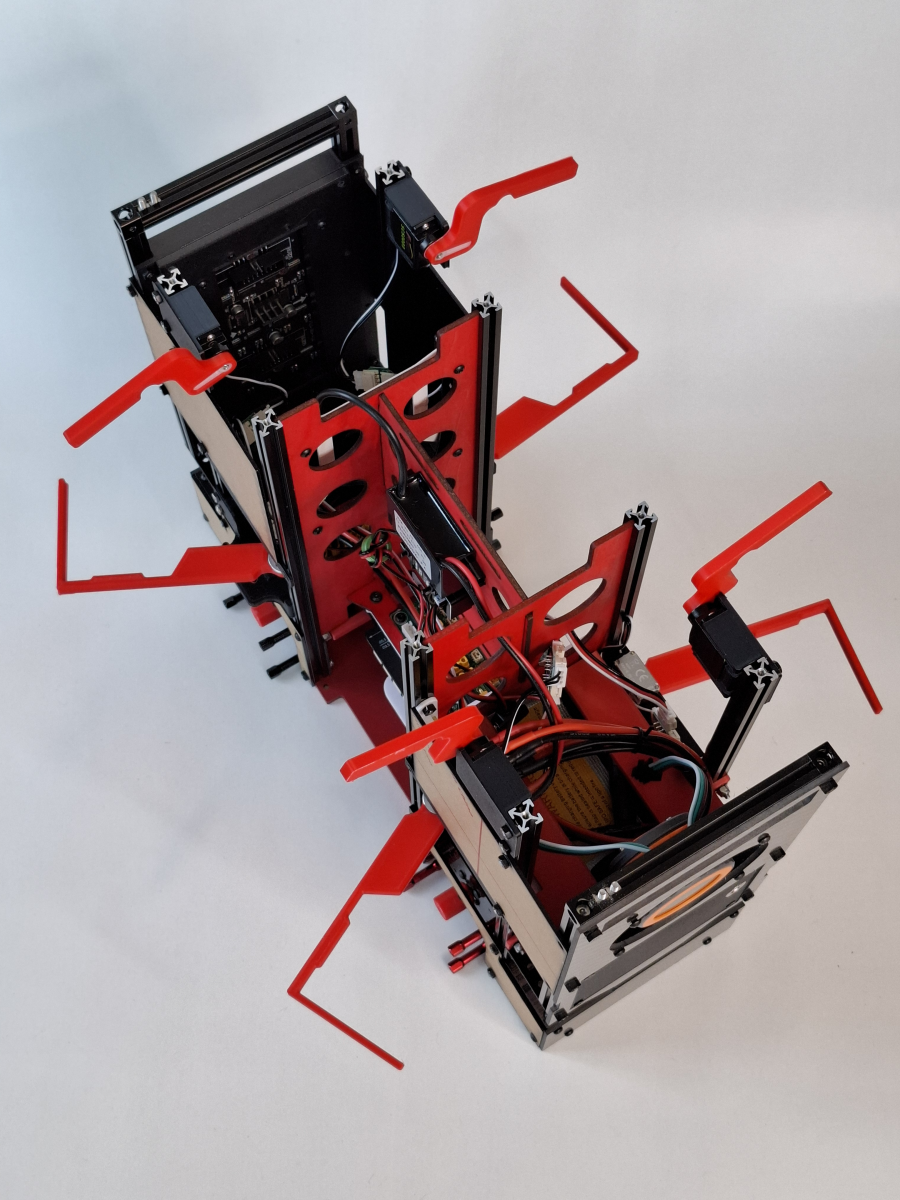
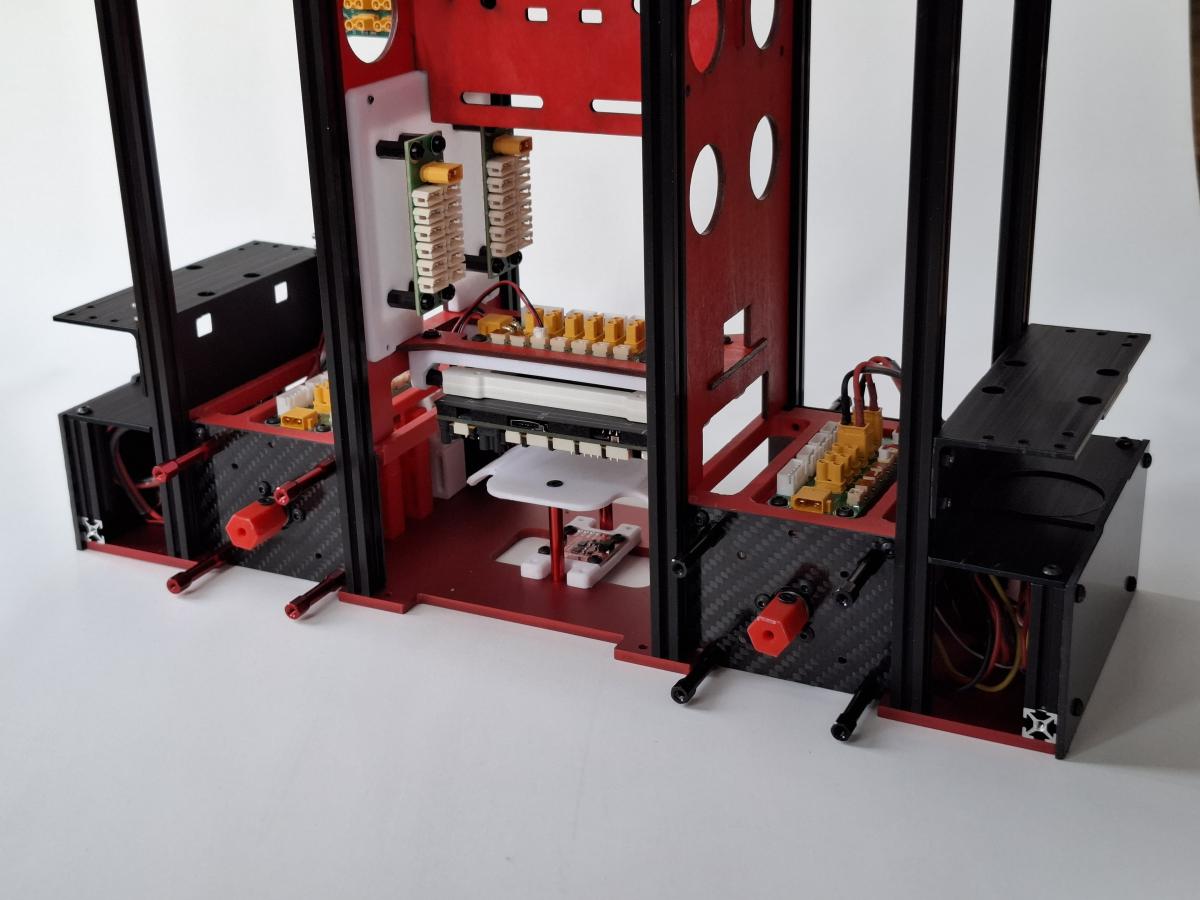
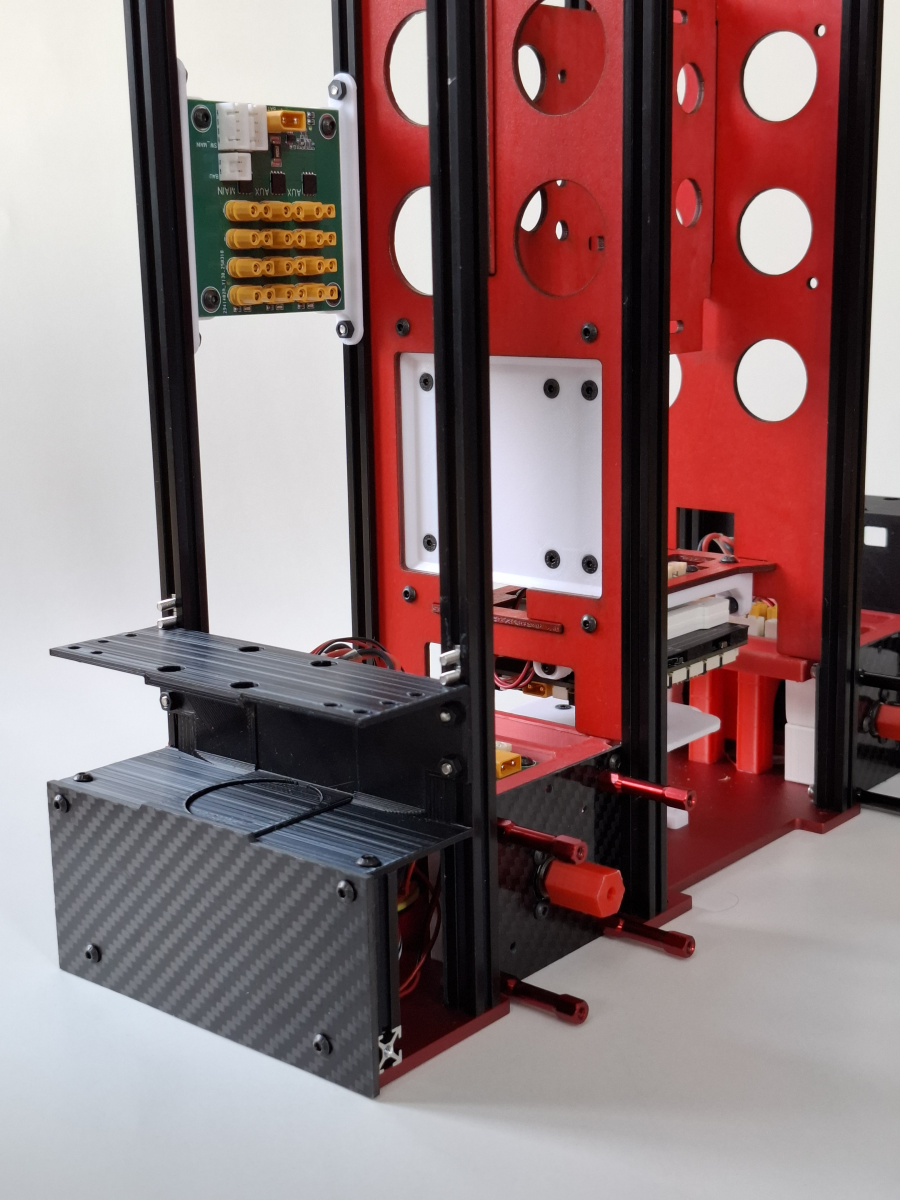
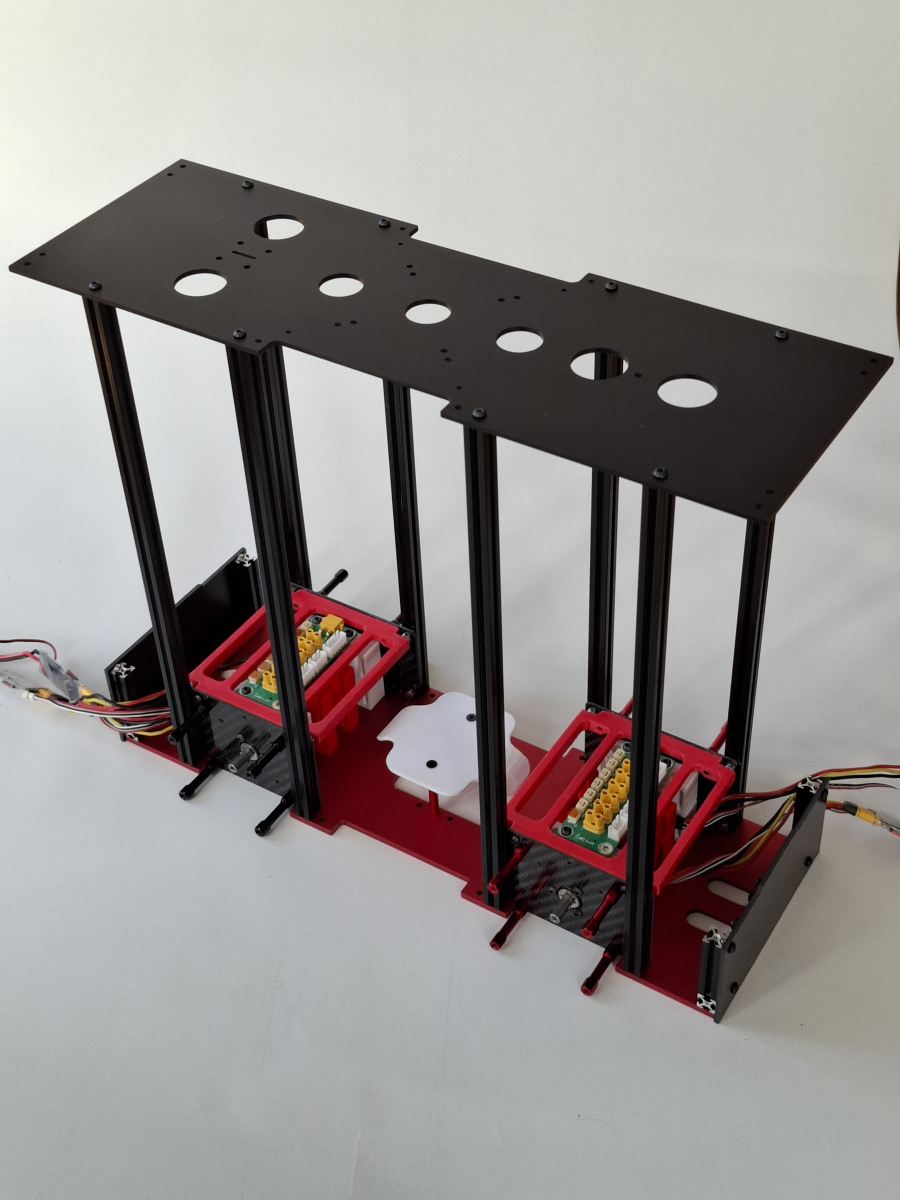
Et ensuite, on clone et on répartit en Nord Est Sud Ouest. Dans les coins, on met des "jambes rétractables" pour pousser les caisses de noisettes.



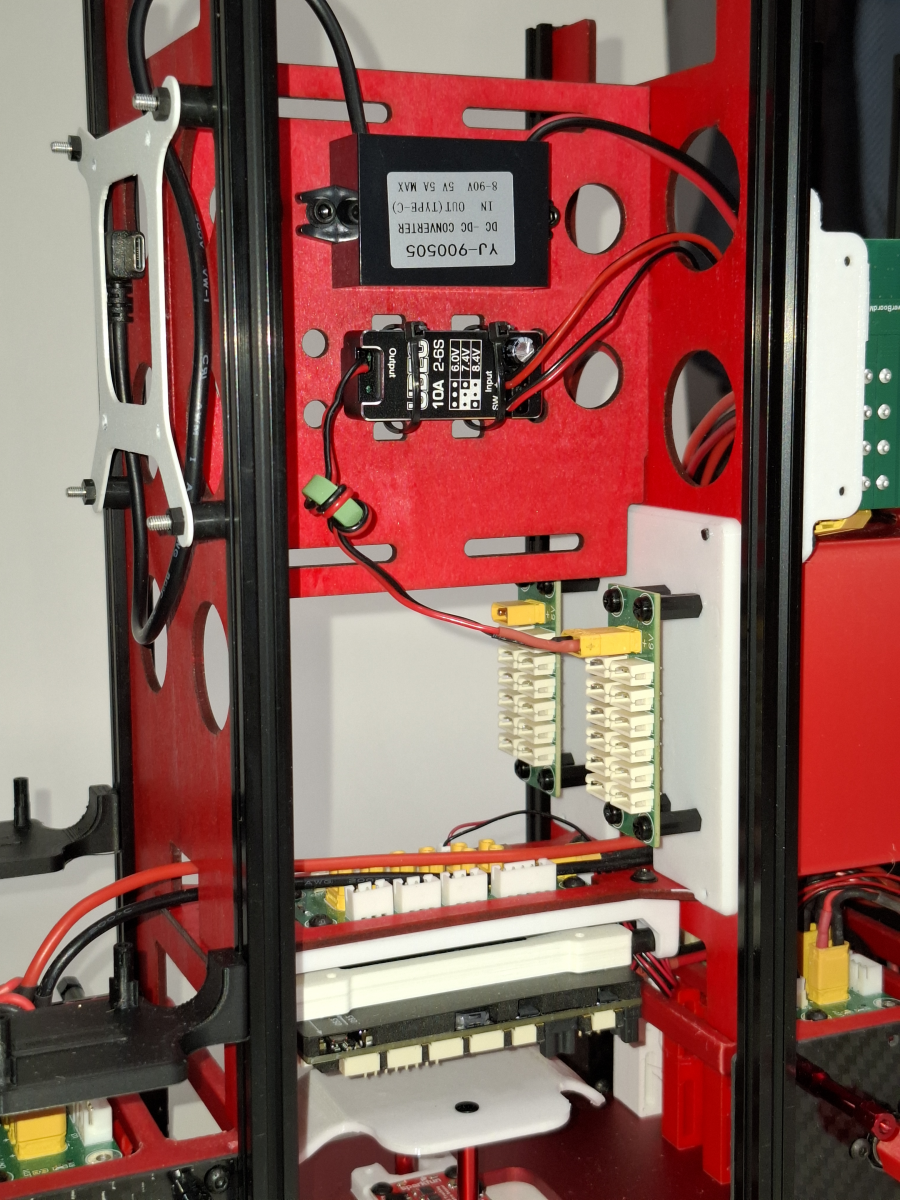
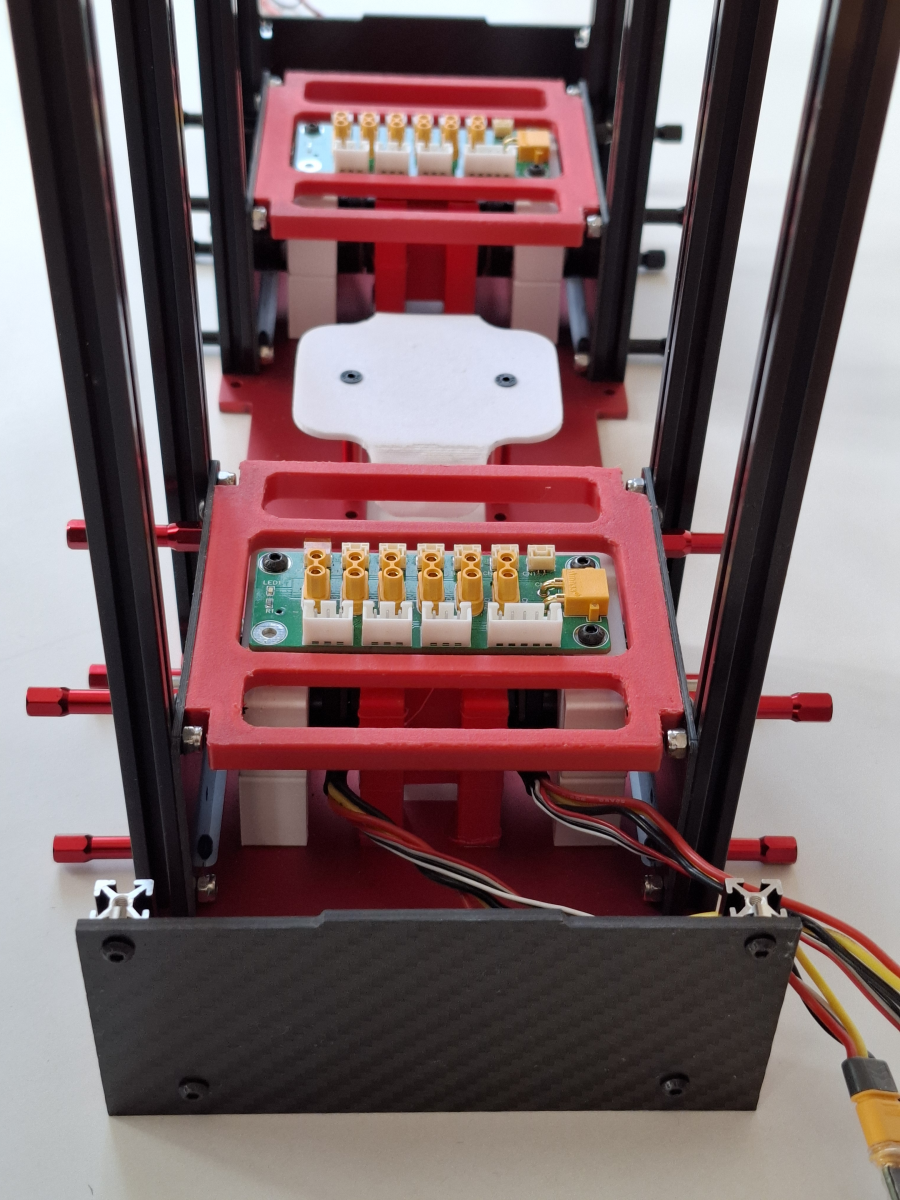
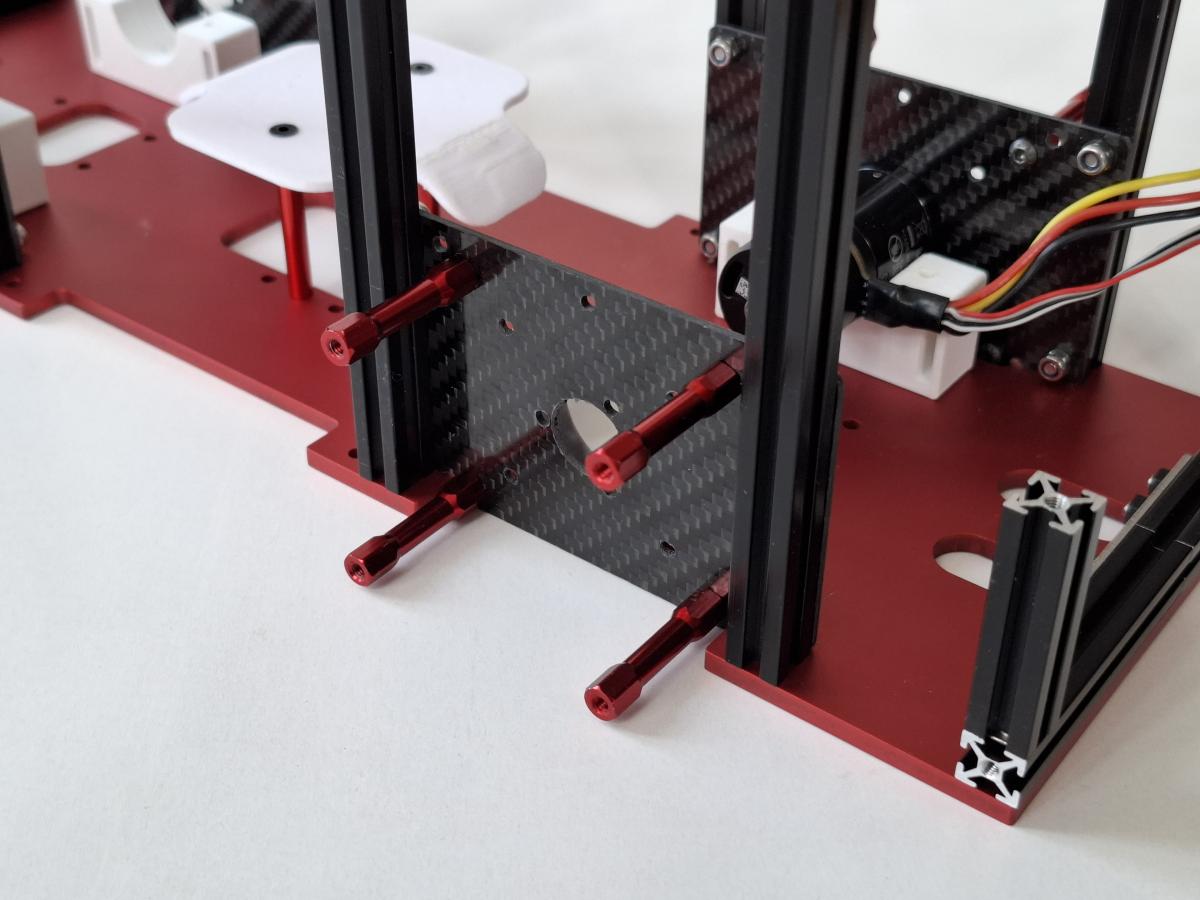
Nickel-Chrome en CAO, on fabrique et on assemble. Le cable-management pose problème comme d'habitude ! On finit par couper les prises des ESC DJI...



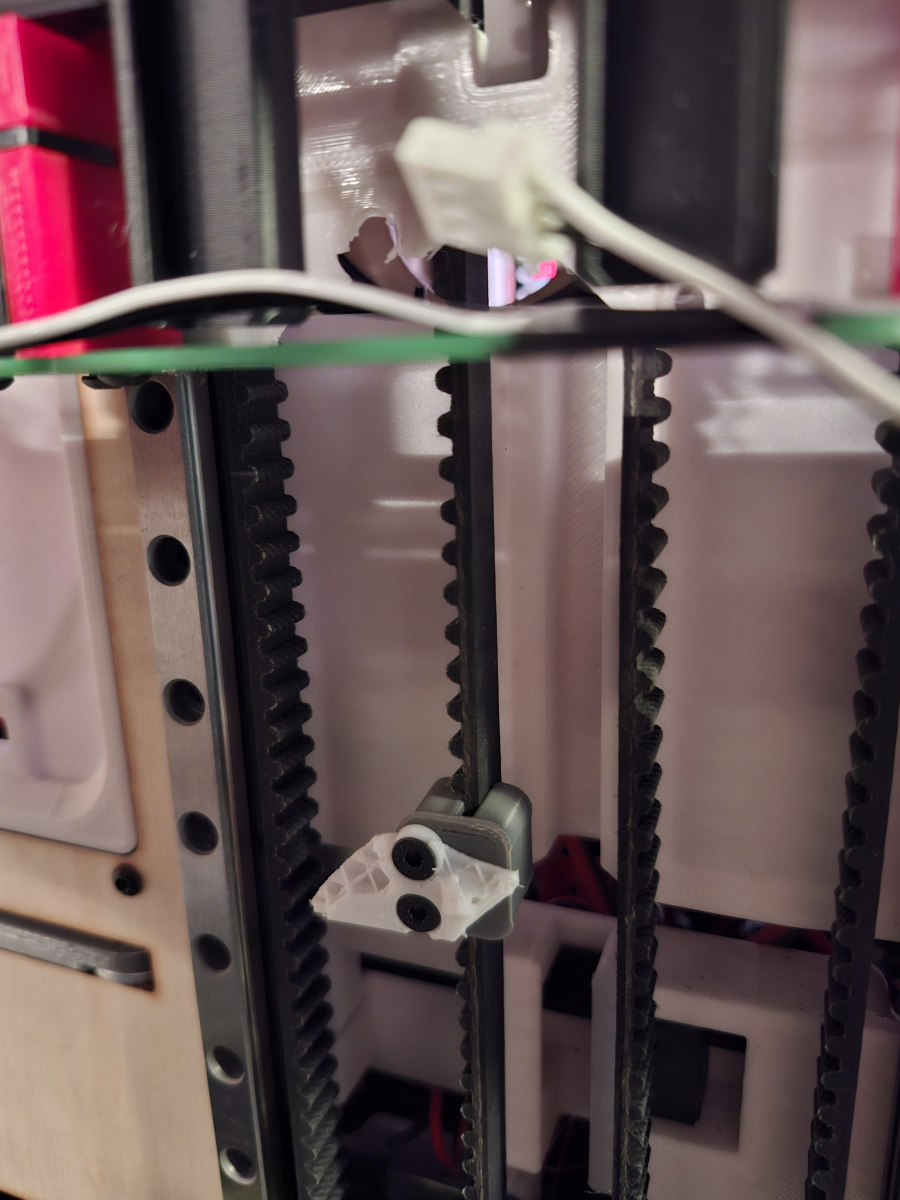
Les silent blocks sont trop durs pour notre robot. On lance l'atelier moulage. Moule en PLA. Silicone bi composant de chez Cultura. On fabrique des silent blocs sur mesure jusqu'à trouver la bonne élasticité :




On remplace les caoutchoucs par les silicones et ca fonctionne.

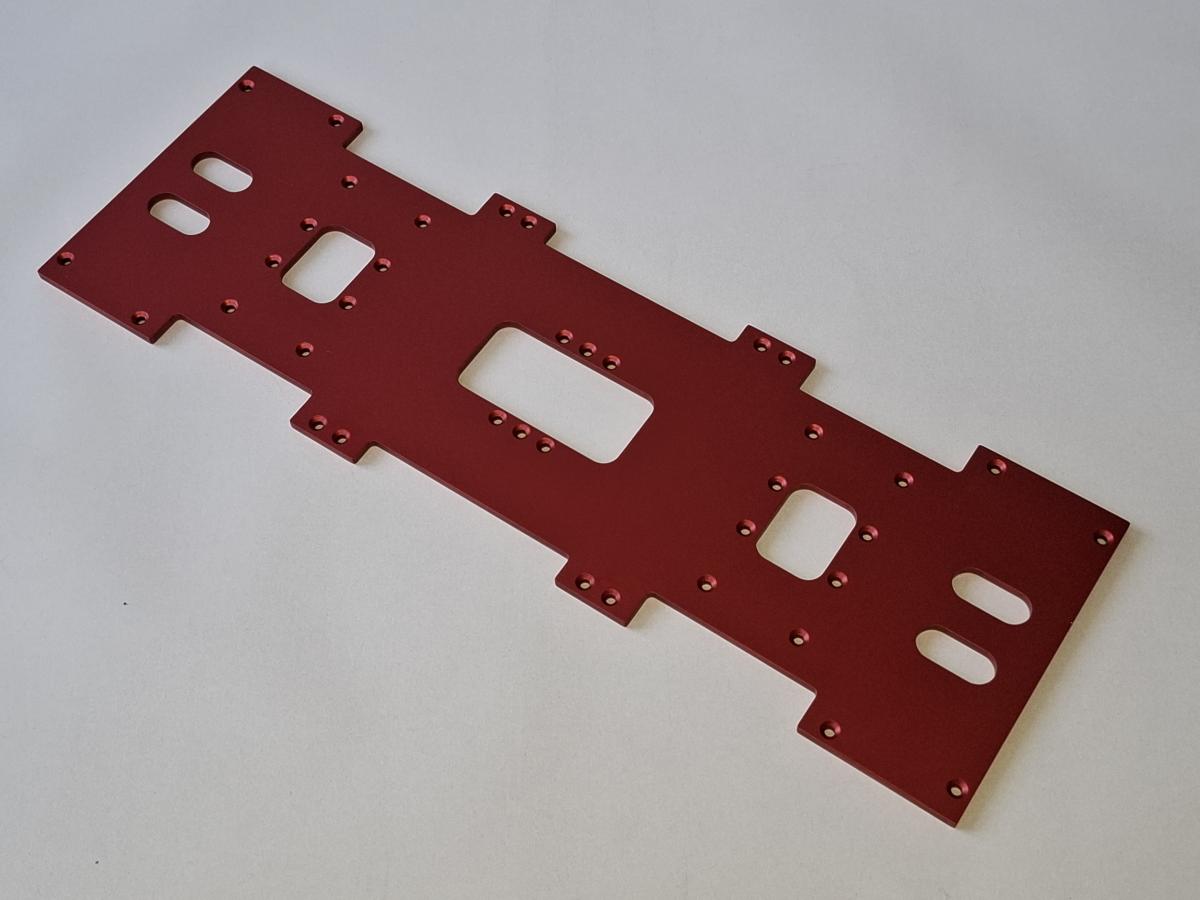
Des châssis protos en bois, puis en fibre de verre / époxy puis en aluminium fraisé






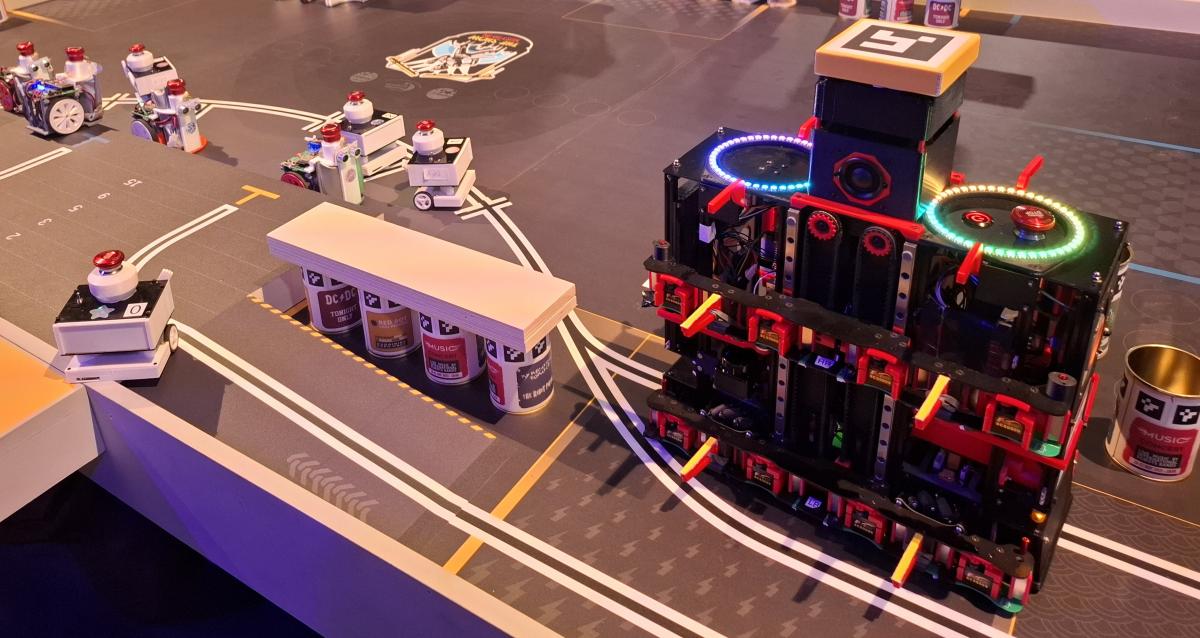
Et la suite, c'était en Belgique et à la Coupe de France !
L'année prochaine, on pense fortement à refaire ce châssis en Omniwheel de la marque GoBilda :