Mon contenu
Mon contenu Homme
Homme





 Posté par
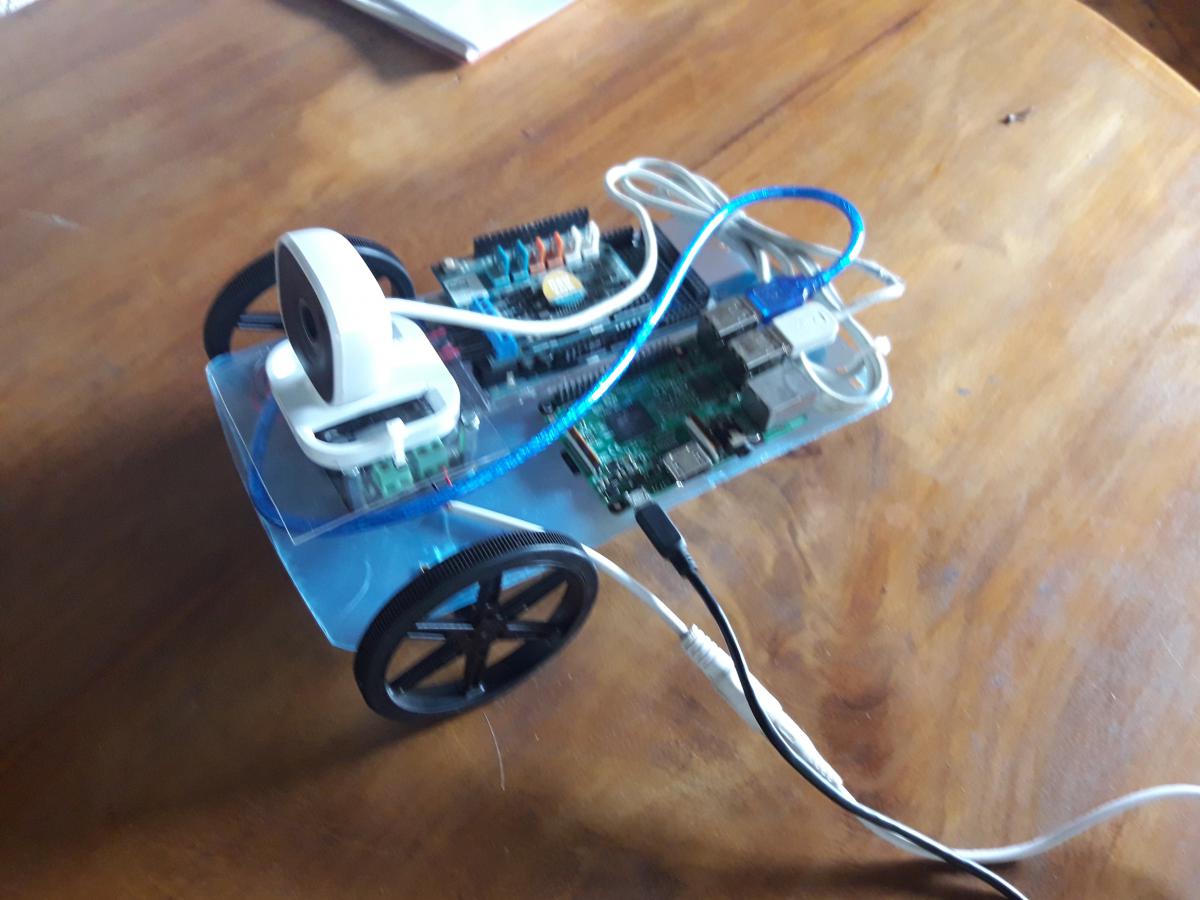
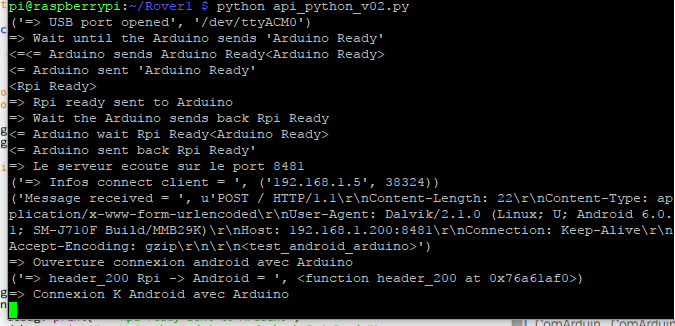
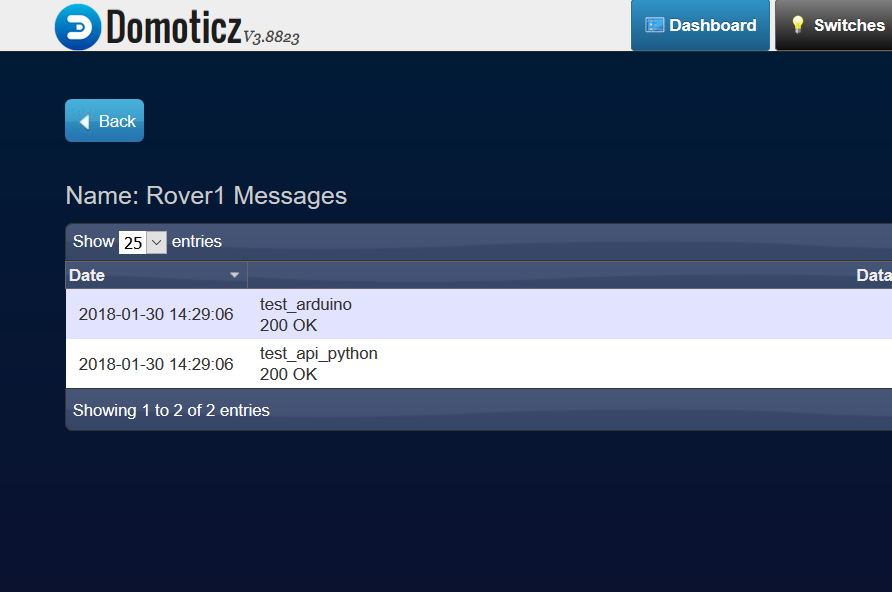
Posté par 1) En attendant les matériels commandés , j'ai regardé le protocole de communication entre le robot et le logiciel domotique Domoticz sur Rpi à choisir pour rester compatible avec l'API python existante du robot utilisée avec l'app de pilotage sur smartphone Android.
- Utilisation de messages "http request de type post" et messages "http response post " (200 OK par exemple)
- Besoin de la librairie python "requests"
payload = {'<test_api_python>'}
r = requests.post("http://192.168.0.x/post",data=payload)
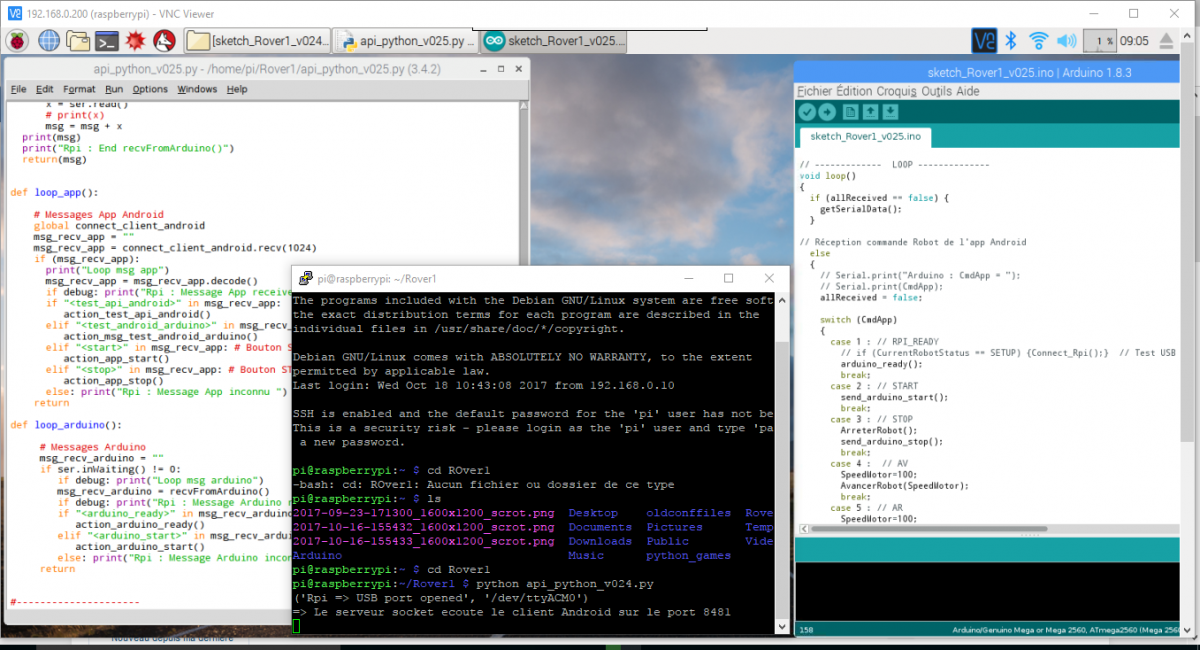
Les messages suivant disponibles dans l'Api python du robot vont pouvoir etre utilisés par le logiciel domotique , sans impact sur l'API python du robot donc , dans le module d'initialisation du dialogue avec le robot (module "init_robot.py ) :
<test_api_python>
<test_arduino>
<start>
<stop>
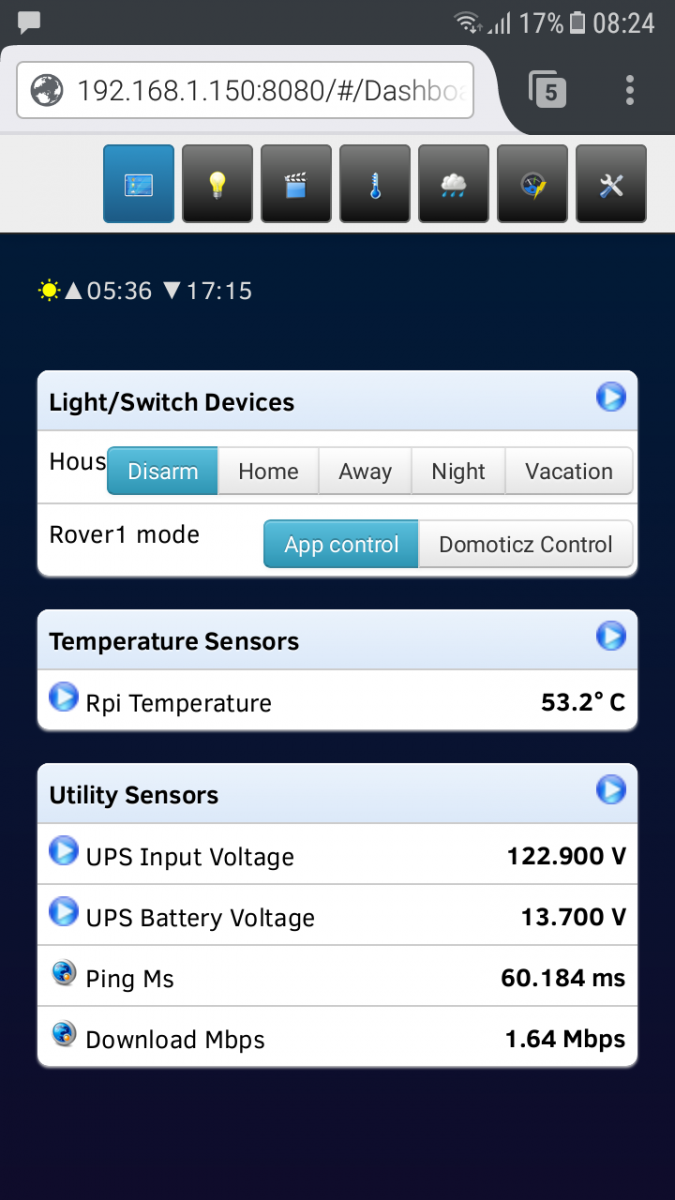
2) Ensuite restera à définir :
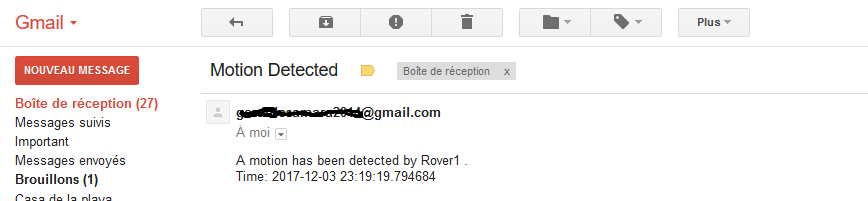
- comment le logiciel domotique va indiquer au robot d'aller dans la zone du capteur qui a détecté un mouvement
- Comment le robot va aller dans cette zone du capteur .
==> J'ai pas vraiment refléchi à la problématique de la navigation dans ce contexte pour l'instant ( le robot connait sa position et doit rejoindre un autre endroit que le logiciel domotique lui donne....) :
==> Stratégie de navigation par carte ( ?)
- Melmet aime ceci