Maillon principal d’une cha├«ne robotique, l’alimentation en ├®nergie ├®lectrique ne peut souffrir de faiblesse. Si la tension s’effondre quand plusieurs moteurs s’animent simultan├®ment, il deviendra impossible de faire la diff├®rence entre un probl├©me logiciel et une insuffisance mat├®rielle. Tester ├®nergiquement et impitoyablement la centrale ├®lectrique constitue un pr├®alable au d├®veloppement informatique du projet et doit anticiper toutes les autres manipulations.
La g├®n├®ration ├®lectrique sur les sondes spatiales.
Deux solutions sont g├®n├®ralement utilis├®es sur les machines scientifiques envoy├®es pour l’exploration du syst├©me solaire. Soit on place sur le robot des panneaux solaires qui rechargent des batteries log├®es dans la sonde. Cette solution ne convient que si l’ensoleillement est suffisant. Trop ├®loign├® de notre ├®toile, la surface des panneaux solaires deviennent trop grande. L’autre technique consiste ├Ā agencer une petite centrale nucl├®aire. Technique rudimentaire et particuli├©rement fiable, elle peut alimenter sans faille une sonde durant plusieurs d├®cennies. Il suffit d’enfermer de l’uranium dans un petit ┬½┬Ābidon┬Ā┬╗ tr├©s r├®sistant. La chaleur d├®gag├®e chauffe des cellules ├Ā effet Peltier. En fait, on utilise l’effet Seebeck qui est l’inverse. En chauffant un couple de mat├®riaux conducteurs, on g├®n├©re une diff├®rence de potentiel qui alimente des r├®gulateurs de tension et des onduleurs ├Ā la demande. Inconv├®nient majeur de cette technique : L’uranium propre ├Ā cette application ne se trouve qu’en Russie. C’est du reste la raison pour laquelle des sondes comme Curiosity embarquent toujours une ou deux exp├®riences sovi├®tiques ├Ā leur bord. Pour JEKERT cette technique a ├®t├® privil├®gi├®e car
elle permet de s’affranchir des inconv├®nients issus de grandes cellules photovolta├»ques nuisant ├Ā la mobilit├® et de ne pas subir les temp├¬tes de sable fr├®quentes qui assombrissent consid├®rablement le ciel de la plan├©te rouge. Une telle centrale est relativement peu volumineuse, d’une fiabilit├® totale car enti├©rement statique, sans avoir en outre un m├®canisme d├®licat de r├®traction et de d├®ploiement de panneaux solaires sources fr├®quentes de probl├©mes m├®caniques.
La g├®n├®ration ├®lectrique pour notre sonde martienne.
 P├®n├®trant avec curiosit├® dans la ┬½┬Āsalle ├®nergie┬Ā┬╗ S8 on ne peut r├®sister ├Ā l’envie d’aller jeter un petit regard par la lucarne Fig.11 au verre ├®pais qui nous s├®pare de S9 la salle blind├®e dans laquelle est entrepos├® sur un support sp├®cial le cylindre m├®tallique (1) qui emprisonne la mati├©re fissile. Tout autour sur la surface lat├®rale des cellules Peltier sont plaqu├®es et reli├®es ├®lectriquement entre elles. On distingue nettement le c├óble ├®lectrique qui en sort et rejoint ├Ā travers un passe-mur ├®tanche le module de r├®gulation (2) en Fig.12 qui va ├¬tre secou├® dans ses derniers retranchements. Notre mission pour ce lundi consiste ├Ā valider ses caract├®ristiques et sa fiabilit├®. Saisissant sur l’├®tabli le cahier des charges fonctionnel, on note que le minuscule potentiom├©tre multi-tours 6 sert ├Ā ajuster finement la tension de sortie. En 1 sera branch├®e la ligne qui arrive du bloc nucl├®aire. C’est sur le bornier 8 que l’on dispose de la tension continue ajust├®e ├Ā exactement 5Vcc qui alimentera les servomoteurs. Notons que la masse IN- et OUT- est commune et sera reli├®e ├Ā GND. En 2 la pr├®sence de la tension d’entr├®e est visualis├®e sur une LED verte. L’afficheur sept segments 7 permet d’afficher la tension d’entr├®e IN ou celle en sortie OUT. La s├®lection se fait avec le bouton 10 qui alterne entre les deux options. La LED 3 ou la LED 9 indique quel est le cot├® s├®lectionn├® par 10. Le bouton poussoir 4 peut ├®teindre l’afficheur 7 si on le d├®sire. Enfin le circuit int├®gr├® 5 se charge de la r├®gulation aval de la tension. Il se comporte comme une
P├®n├®trant avec curiosit├® dans la ┬½┬Āsalle ├®nergie┬Ā┬╗ S8 on ne peut r├®sister ├Ā l’envie d’aller jeter un petit regard par la lucarne Fig.11 au verre ├®pais qui nous s├®pare de S9 la salle blind├®e dans laquelle est entrepos├® sur un support sp├®cial le cylindre m├®tallique (1) qui emprisonne la mati├©re fissile. Tout autour sur la surface lat├®rale des cellules Peltier sont plaqu├®es et reli├®es ├®lectriquement entre elles. On distingue nettement le c├óble ├®lectrique qui en sort et rejoint ├Ā travers un passe-mur ├®tanche le module de r├®gulation (2) en Fig.12 qui va ├¬tre secou├® dans ses derniers retranchements. Notre mission pour ce lundi consiste ├Ā valider ses caract├®ristiques et sa fiabilit├®. Saisissant sur l’├®tabli le cahier des charges fonctionnel, on note que le minuscule potentiom├©tre multi-tours 6 sert ├Ā ajuster finement la tension de sortie. En 1 sera branch├®e la ligne qui arrive du bloc nucl├®aire. C’est sur le bornier 8 que l’on dispose de la tension continue ajust├®e ├Ā exactement 5Vcc qui alimentera les servomoteurs. Notons que la masse IN- et OUT- est commune et sera reli├®e ├Ā GND. En 2 la pr├®sence de la tension d’entr├®e est visualis├®e sur une LED verte. L’afficheur sept segments 7 permet d’afficher la tension d’entr├®e IN ou celle en sortie OUT. La s├®lection se fait avec le bouton 10 qui alterne entre les deux options. La LED 3 ou la LED 9 indique quel est le cot├® s├®lectionn├® par 10. Le bouton poussoir 4 peut ├®teindre l’afficheur 7 si on le d├®sire. Enfin le circuit int├®gr├® 5 se charge de la r├®gulation aval de la tension. Il se comporte comme une 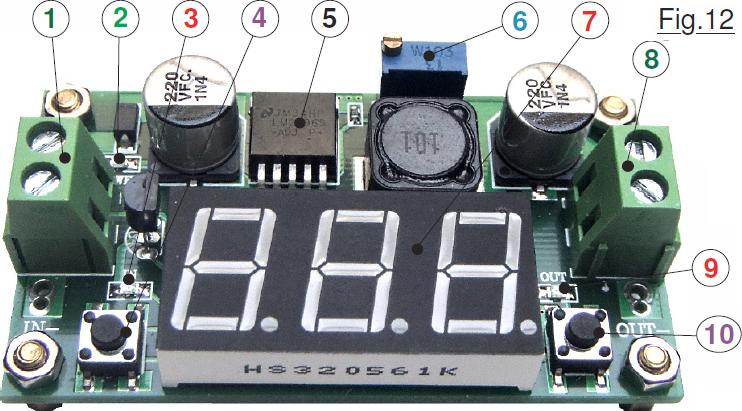 r├®sistance variable. Ce circuit n’est pas un onduleur, il ne peut que raboter une tension qui d├®passe la valeur consign├®e avec l’ajustable 6. Il faut donc imp├®rativement que la tension en 1 soit sup├®rieure d’au moins 2V ├Ā celle d├®sir├®e en sortie. Ne pas oublier non plus que ce circuit fonctionne en d├®coupage ├Ā une fr├®quence ├®lev├®e. Les transitoires vont le faire chauffer de fa├¦on notable. Il n’est pas ├®quip├® d’un dissipateur. Il est donc recommand├® de ne pas le soumettre ├Ā une tension d’entr├®e exag├®r├®e. Sans radiateur, avec le┬Ā┬Ābloc secteur de la Fig.11 et un d├®bit de 1,5A on atteint rapidement la limite thermique. La protection interne se d├®clenche et il passe en fonctionnement temporaire cyclique : Trois secondes avec pr├®sence en sortie des 5Vcc, puis deux ├Ā trois secondes en coupure. Conclusion : Si l’on d├®sire pouvoir utiliser ce module alimentation ├Ā un d├®bit permanent de 1,2A ├Ā 1,4A il faut imp├®rativement le ventiler. Dirigeons nous vers l’├®tabli d’assemblage ou des sp├®cialistes ├®nergies s’affairent.
r├®sistance variable. Ce circuit n’est pas un onduleur, il ne peut que raboter une tension qui d├®passe la valeur consign├®e avec l’ajustable 6. Il faut donc imp├®rativement que la tension en 1 soit sup├®rieure d’au moins 2V ├Ā celle d├®sir├®e en sortie. Ne pas oublier non plus que ce circuit fonctionne en d├®coupage ├Ā une fr├®quence ├®lev├®e. Les transitoires vont le faire chauffer de fa├¦on notable. Il n’est pas ├®quip├® d’un dissipateur. Il est donc recommand├® de ne pas le soumettre ├Ā une tension d’entr├®e exag├®r├®e. Sans radiateur, avec le┬Ā┬Ābloc secteur de la Fig.11 et un d├®bit de 1,5A on atteint rapidement la limite thermique. La protection interne se d├®clenche et il passe en fonctionnement temporaire cyclique : Trois secondes avec pr├®sence en sortie des 5Vcc, puis deux ├Ā trois secondes en coupure. Conclusion : Si l’on d├®sire pouvoir utiliser ce module alimentation ├Ā un d├®bit permanent de 1,2A ├Ā 1,4A il faut imp├®rativement le ventiler. Dirigeons nous vers l’├®tabli d’assemblage ou des sp├®cialistes ├®nergies s’affairent.
Sch├®ma complet du syst├©me de g├®n├®ration ├®lectrique.
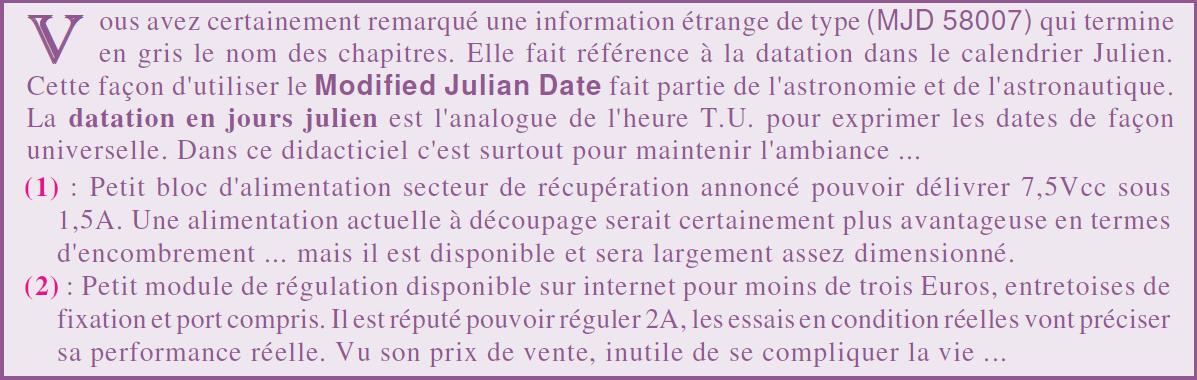
Monopoliser une alimentation destin├®e ├Ā de la petite robotique pilot├®e par une carte Arduino pouvant d├®biter en permanence plus d’un amp├©re uniquement pour la sonde martienne n’est pas une approche tr├©s pragmatique. Autant concevoir un petit bloc ├®lectronique le plus convivial possible qui fera partie int├®grante des dispositifs d├®di├®s ├Ā notre micro-pico-informatique. Par convivial, comprendre ┬½┬Ātoutes les facilit├®s possibles┬Ā┬╗ pour se brancher, pour surveiller les param├©tres pertinents. Nous allons donc ajouter quelques bricoles au bloc radioactif de la Fig.11 et au module de r├®gulation de la Fig.12 sur deux petits circuits imprim├®s sp├®cifiques. Le 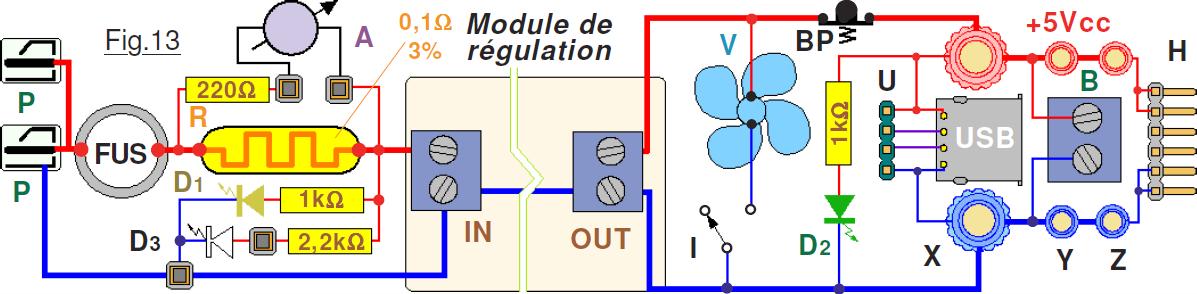 sch├®ma complet de cette petite alimentation est donn├® en Fig.13 avec en P les deux prises pouvant recevoir la fiche du bloc secteur. Elles sont distribu├®es de chaque cot├® du bo├«tier, car l’exp├®rience montre que parfois on pr├®f├®rera ┬½┬Āavoir le fil de l’autre cot├®┬Ā┬╗. Imm├®diatement un Fusible de 3,15A prot├©ge le transformateur basse tension de tout incident durant l’utilisation de cette source ├®lectrique de laboratoire. (Donc souvent manipul├®e avec des risques potentiels de courts circuits.) Puis la tension continue issue du secteur va dans l’entr├®e IN du module de r├®gulation en traversant la r├®sistance R de 0,1╬®. ├Ć 1,2A de d├®bit la tension aux bornes sera de 0,12V largement suffisant pour faire aller en but├®e le petit galvanom├©tre A charg├® d’indiquer l’intensit├® consomm├®e en sortie. Gradu├® jusqu’├Ā 6 la d├®viation est affin├®e par la r├®sistance de 270╬® pour correspondre ├Ā 1,2A ├Ā pleine d├®viation. La LED jaune D1 t├®moigne de l’arriv├®e de la tension continue issue du bloc secteur. D3 pour son compte est une LED blanche qui r├®tro-├®claire le galvanom├©tre utilisable ainsi m├¬me dans le noir. La sortie OUT du bloc de r├®gulation est ajust├®e ├Ā exactement +5Vcc et peut alimenter le ventilateur V. Bien que relativement discret, il s’av├©re inutile en dessous de 500mA de consommation. On peut alors le couper avec l’inverseur I.
sch├®ma complet de cette petite alimentation est donn├® en Fig.13 avec en P les deux prises pouvant recevoir la fiche du bloc secteur. Elles sont distribu├®es de chaque cot├® du bo├«tier, car l’exp├®rience montre que parfois on pr├®f├®rera ┬½┬Āavoir le fil de l’autre cot├®┬Ā┬╗. Imm├®diatement un Fusible de 3,15A prot├©ge le transformateur basse tension de tout incident durant l’utilisation de cette source ├®lectrique de laboratoire. (Donc souvent manipul├®e avec des risques potentiels de courts circuits.) Puis la tension continue issue du secteur va dans l’entr├®e IN du module de r├®gulation en traversant la r├®sistance R de 0,1╬®. ├Ć 1,2A de d├®bit la tension aux bornes sera de 0,12V largement suffisant pour faire aller en but├®e le petit galvanom├©tre A charg├® d’indiquer l’intensit├® consomm├®e en sortie. Gradu├® jusqu’├Ā 6 la d├®viation est affin├®e par la r├®sistance de 270╬® pour correspondre ├Ā 1,2A ├Ā pleine d├®viation. La LED jaune D1 t├®moigne de l’arriv├®e de la tension continue issue du bloc secteur. D3 pour son compte est une LED blanche qui r├®tro-├®claire le galvanom├©tre utilisable ainsi m├¬me dans le noir. La sortie OUT du bloc de r├®gulation est ajust├®e ├Ā exactement +5Vcc et peut alimenter le ventilateur V. Bien que relativement discret, il s’av├©re inutile en dessous de 500mA de consommation. On peut alors le couper avec l’inverseur I.  Puis, les 5Vcc sont distribu├®s ├Ā toute une kyrielle de prises, couvrant ainsi tous les besoins habituels. En H on trouve le classique connecteur m├óle HE14. En B nous avons un bornier bien commode si l’on d├®sire brancher un fil ├®lectrique quelconque. Une prise USB est ├®galement aliment├®e en 5Vcc avec possibilit├® d’intercepter si on le d├®sire ses signaux sur le petit connecteur U de type HE14. Enfin en X, Y et Z on trouve des prises pour fiches bananes de diam├©tre 4mm ou 2mm. Pour des raisons d’accessibilit├®, les prises Y et Z sont sur des faces diff├®rentes du bo├«tier. La LED verte D2 t├®moigne de la pr├®sence du 5Vcc sur les diverses prises d’utilisation. Enfin, en BP se trouve le Bouton poussoir de Panique qui permet en urgence de couper imm├®diatement le courant sur les prises utilisateur. Ce sera bien commode lorsque le logiciel ne sera pas au point et que les servomoteurs ne s’arr├¬teront pas ├Ā l’orientation pr├®vue. BP est un petit SWICHT qui revient au travail quand on le rel├óche. Sur incident il faut commencer par d├®brancher les fils d’alimentation vers l’utilisation avant de le lib├®rer. (Ou d├®brancher le bloc secteur de la prise 220VŌł╝.) Le dessin des circuits imprim├®s est disponible dans le fichier Sonde Jekert.spl que l’on imprime avec la visionneuse. Il aurait ├®t├® certainement plus judicieux de ne faire qu’un seul circuit imprim├®, mais sachez que l’├®tude initiale ne pr├®voyait pas la pr├®sence d’un galvanom├©tre pour indiquer l’intensit├®. Comme ce dernier ├®tait disponible, le bloc ├®nerg├®tique a b├®n├®fici├® par la suite de sa pr├®sence, lorsque le module de r├®gulation de la Fig.12 a pass├® les tests et ├®t├® estim├® ┬½┬Ābon pour le service┬Ā┬╗. La r├®sistance R visible sur la Fig.14 est de forte puissance. Elle ne dissipe que 0,15W au maximum. C’est encore une raison de disponibilit├® qui a impos├® ce choix. Sur le circuit imprim├® de distribution
Puis, les 5Vcc sont distribu├®s ├Ā toute une kyrielle de prises, couvrant ainsi tous les besoins habituels. En H on trouve le classique connecteur m├óle HE14. En B nous avons un bornier bien commode si l’on d├®sire brancher un fil ├®lectrique quelconque. Une prise USB est ├®galement aliment├®e en 5Vcc avec possibilit├® d’intercepter si on le d├®sire ses signaux sur le petit connecteur U de type HE14. Enfin en X, Y et Z on trouve des prises pour fiches bananes de diam├©tre 4mm ou 2mm. Pour des raisons d’accessibilit├®, les prises Y et Z sont sur des faces diff├®rentes du bo├«tier. La LED verte D2 t├®moigne de la pr├®sence du 5Vcc sur les diverses prises d’utilisation. Enfin, en BP se trouve le Bouton poussoir de Panique qui permet en urgence de couper imm├®diatement le courant sur les prises utilisateur. Ce sera bien commode lorsque le logiciel ne sera pas au point et que les servomoteurs ne s’arr├¬teront pas ├Ā l’orientation pr├®vue. BP est un petit SWICHT qui revient au travail quand on le rel├óche. Sur incident il faut commencer par d├®brancher les fils d’alimentation vers l’utilisation avant de le lib├®rer. (Ou d├®brancher le bloc secteur de la prise 220VŌł╝.) Le dessin des circuits imprim├®s est disponible dans le fichier Sonde Jekert.spl que l’on imprime avec la visionneuse. Il aurait ├®t├® certainement plus judicieux de ne faire qu’un seul circuit imprim├®, mais sachez que l’├®tude initiale ne pr├®voyait pas la pr├®sence d’un galvanom├©tre pour indiquer l’intensit├®. Comme ce dernier ├®tait disponible, le bloc ├®nerg├®tique a b├®n├®fici├® par la suite de sa pr├®sence, lorsque le module de r├®gulation de la Fig.12 a pass├® les tests et ├®t├® estim├® ┬½┬Ābon pour le service┬Ā┬╗. La r├®sistance R visible sur la Fig.14 est de forte puissance. Elle ne dissipe que 0,15W au maximum. C’est encore une raison de disponibilit├® qui a impos├® ce choix. Sur le circuit imprim├® de distribution 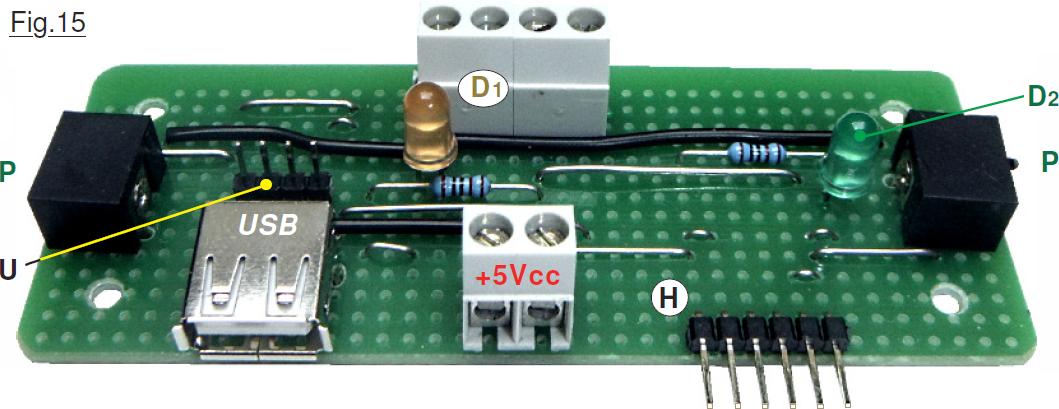 des ├®nergies photographi├® en Fig.15 on remarque de part et d’autre les deux prises P pour les fiches du bloc secteur. Notez au passage la pr├®sence en U du petit connecteur HE14 reli├® directement ├Ā la prise USB femelle pour pouvoir examiner ses signaux binaires. Dirig├®es vers nous se trouvent les diverses connections possibles, avec sur la m├¬me face du boiter deux douilles pour fiches bananes de diam├©tre 4mm, une pour le moins, et une pour le +5Vcc. (Voir la Fig.16.)
des ├®nergies photographi├® en Fig.15 on remarque de part et d’autre les deux prises P pour les fiches du bloc secteur. Notez au passage la pr├®sence en U du petit connecteur HE14 reli├® directement ├Ā la prise USB femelle pour pouvoir examiner ses signaux binaires. Dirig├®es vers nous se trouvent les diverses connections possibles, avec sur la m├¬me face du boiter deux douilles pour fiches bananes de diam├©tre 4mm, une pour le moins, et une pour le +5Vcc. (Voir la Fig.16.)
R├®alisation pratique du bloc alimentation.
Largement document├®es dans mes ouvrages disponibles sur ROBOT MAKER, pas question d’alourdir ce tutoriel avec la description d├®taill├®e de mes techniques pour concr├®tiser un bo├«tier personnalis├®. Par exemple allez consulter :
http://www.robot-maker.com/ouvrages/interface-puissance-arduino/mettre-oeuvre-polystyrene-choc/
Nous allons nous limiter dans ces lignes ├Ā quelques points particuliers pouvant ├®ventuellement vous aider si vous r├®alisez une alimentation analogue. Sur la photographie de la Fig.16 le module de r├®gulation n’est pas encore int├®gr├® pour laisser bien visible le c├óblage. Le coffret ├®tant assez compact, il faut travailler avec m├®thode. En 1 se trouve l’orifice de passage du tournevis qui en usage normal, couvercle referm├®, pour venir serrer ou desserrer
les vis du bornier accessible en 10. L’orifice 2 sur la face arri├©re permet d’ins├®rer la fiche du bloc secteur sur la prise 3. De l’autre cot├®, vers nous se trouve en 21 le trou de passage vers la deuxi├©me prise P. La prise femelle USB est face au trou 9 avec en 4 le connecteur HE14 directement reli├® ├Ā cette derni├©re. Bien visible en 5 la diode D1 et en 14 celle de sortie D2. En 6 se branche le petit connecteur HE14 qui va vers le galvanom├©tre 18 de mesure du courant. En 7 le SWICHT du bouton de panique qui d├®passe du couvercle quand le coffret est referm├®. Les gros fils 8 v├®hiculent le courant vers le module de r├®gulation. Vous pouvez remarquer qu’ils sont de section un peu exag├®r├®e. Suite ├Ā une tr├©s longue exp├®rience pour la r├®alisation de multiples alimentations, je suis arriv├® ├Ā la conclusion qu’il vaut mieux une liaison trop
 muscl├®e que l’inverse. La dynamique sur les transitoires est meilleure. Ceci ├®tant pr├®cis├®, j’ai une tendance f├ócheuse dans ce domaine ├Ā abuser un peu des grosses sections. 11 et 13 sont les deux douilles pour fiches bananes de diam├©tre 2mm, avec leurs copines en 19 sur la face dirig├®e vers nous. Elles sont compl├®t├®es en 20 par les douilles pour fiches de ├ś 4mm. En 15 le petit ventilateur peut ├¬tre coup├® par l’inverseur 16. Peu visible en 17 se trouve le support du Fusible. Enfin en 12 on remarque le bornier du circuit de distribution ├®lectrique reli├® au module de r├®gulation de tension.
muscl├®e que l’inverse. La dynamique sur les transitoires est meilleure. Ceci ├®tant pr├®cis├®, j’ai une tendance f├ócheuse dans ce domaine ├Ā abuser un peu des grosses sections. 11 et 13 sont les deux douilles pour fiches bananes de diam├©tre 2mm, avec leurs copines en 19 sur la face dirig├®e vers nous. Elles sont compl├®t├®es en 20 par les douilles pour fiches de ├ś 4mm. En 15 le petit ventilateur peut ├¬tre coup├® par l’inverseur 16. Peu visible en 17 se trouve le support du Fusible. Enfin en 12 on remarque le bornier du circuit de distribution ├®lectrique reli├® au module de r├®gulation de tension.
Consacrer six pages ├Ā la r├®alisation du bloc alimentation peut sembler exag├®r├® dans un tutoriel d├®di├® principalement ├Ā la conception d’un petit robot. Le penser est une erreur, car on n├®glige trop souvent ce maillon de la cha├«ne pourtant essentiel. Alors soigner cette fonction est primordial et ├®vitera bien des t├ótonnements dans les futurs projets qui la mettront ├Ā contribution.
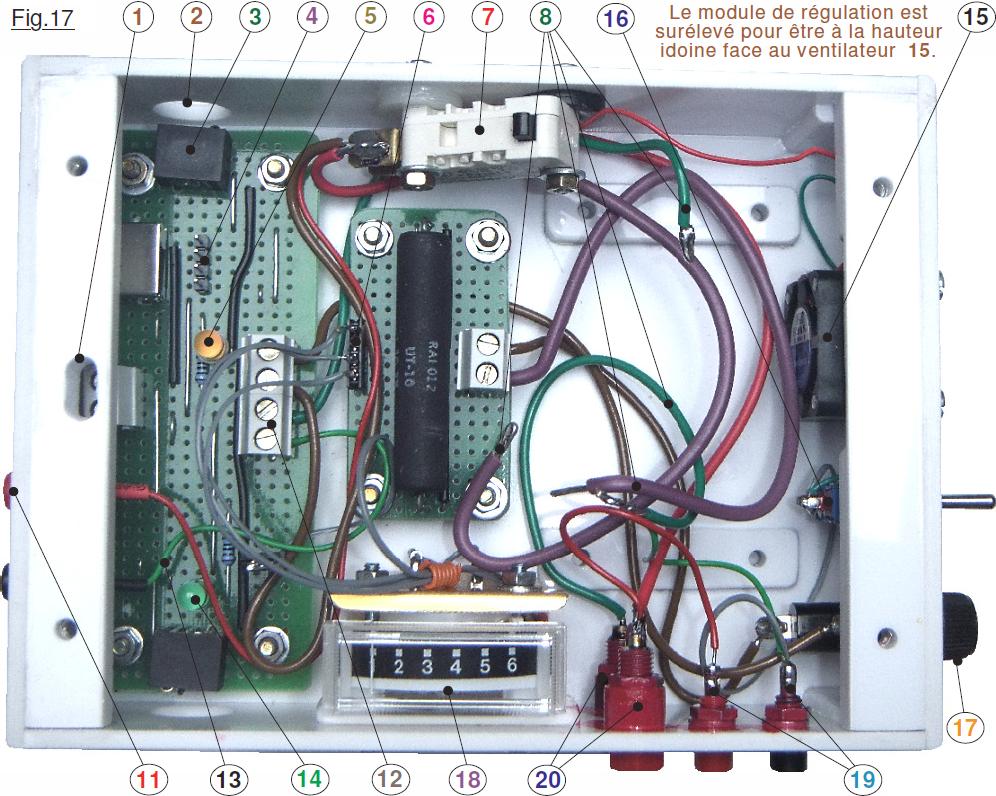 La Fig.17 qui pr├®sente l’ensemble vu de dessus utilise des rep├©res identiques ├Ā ceux de la Fig.16 pour faciliter les observations entre les deux photographies. On distingue nettement la petite bride orange fabriqu├®e ├Ā la demande pour immobiliser le petit galvanom├©tre ├Ā cadre mobile 18 sur la face avant. Bien que ce ne soit pas particuli├©rement ├®vident, toutes les douilles pour fiches bananes ainsi que le support de fusible sont copieusement barbouill├® de vernis ├Ā ongles (Rose sur la photographie.) pour les coller ┬½┬Ād├®finitivement┬Ā┬╗ quand leurs ├®crous de fixation ont ├®t├® serr├®s. Rien n’est plus aga├¦ant quand on est en train de proc├®der ├Ā des essais et qu’une douille se met ├Ā gigoter car son ├®crou de liaison s’est l├®g├©rement desserr├® ├Ā l’usage. Enfin, les divers gros fils de liaison avec le bloc de r├®gulation passent sous ce dernier. Tout entre dans le coffret, sans ┬½┬Āmascagner┬Ā┬╗, il faut toutefois proc├®der ├Ā l’int├®gration avec du doigt├® car l’ensemble est bien rempli, et le volume tr├©s occup├®.
La Fig.17 qui pr├®sente l’ensemble vu de dessus utilise des rep├©res identiques ├Ā ceux de la Fig.16 pour faciliter les observations entre les deux photographies. On distingue nettement la petite bride orange fabriqu├®e ├Ā la demande pour immobiliser le petit galvanom├©tre ├Ā cadre mobile 18 sur la face avant. Bien que ce ne soit pas particuli├©rement ├®vident, toutes les douilles pour fiches bananes ainsi que le support de fusible sont copieusement barbouill├® de vernis ├Ā ongles (Rose sur la photographie.) pour les coller ┬½┬Ād├®finitivement┬Ā┬╗ quand leurs ├®crous de fixation ont ├®t├® serr├®s. Rien n’est plus aga├¦ant quand on est en train de proc├®der ├Ā des essais et qu’une douille se met ├Ā gigoter car son ├®crou de liaison s’est l├®g├©rement desserr├® ├Ā l’usage. Enfin, les divers gros fils de liaison avec le bloc de r├®gulation passent sous ce dernier. Tout entre dans le coffret, sans ┬½┬Āmascagner┬Ā┬╗, il faut toutefois proc├®der ├Ā l’int├®gration avec du doigt├® car l’ensemble est bien rempli, et le volume tr├©s occup├®.
La suite est ici.