Belle journûˋe qui s’annonce, car on vient de me prûˋvenir sur mon Bipeur qu’un transporteur û livrûˋ les divers ûˋlûˋments mûˋcaniques qui vont matûˋrialiser le squelette de notre petite sonde interplanûˋtaire. Quand j’entre dans la salle d’usinages mûˋcaniques S1 je suis impatient de pouvoir contempler ces belles rûˋalisations. Les  techniciens prûˋsents ont procûˋdûˋ au dûˋballage et û l’inventaire. Cette premiû´re phase est tout û fait satisfaisante. Il nous reste û vûˋrifier la conformitûˋ au cahier des charges fonctionnel. Toutes les piû´ces livrûˋes sont dûˋcoupûˋes par cisaillement dans de la plaque d’aluminium d’environ 0,8mm d’ûˋpaisseur. Ce type de fabrication laisse les ô¨ô trancheô ô£ latûˋrales rugueuses et un peu coupantes. La premiû´re amûˋlioration consiste û systûˋmatiquement arrondir tous les pourtours et les orifices rectangulaires avec du papier abrasif trû´s fin. Puis, les trous ronds sont chanfreinûˋs avec un petit foret affutûˋ û 45ô¯. La Fig.36 est trompeuse. Photographiûˋe en ô¨ô macroô ô£ cette piû´ce ressemble û une grosse poutre de chantier de charpentes mûˋtalliques. Elle est minuscule. Observez au passage que le tenon de gauche est lûˋgû´rement plus long que celui de droite ce qui pour l’application envisagûˋe est du reste sans importance.
techniciens prûˋsents ont procûˋdûˋ au dûˋballage et û l’inventaire. Cette premiû´re phase est tout û fait satisfaisante. Il nous reste û vûˋrifier la conformitûˋ au cahier des charges fonctionnel. Toutes les piû´ces livrûˋes sont dûˋcoupûˋes par cisaillement dans de la plaque d’aluminium d’environ 0,8mm d’ûˋpaisseur. Ce type de fabrication laisse les ô¨ô trancheô ô£ latûˋrales rugueuses et un peu coupantes. La premiû´re amûˋlioration consiste û systûˋmatiquement arrondir tous les pourtours et les orifices rectangulaires avec du papier abrasif trû´s fin. Puis, les trous ronds sont chanfreinûˋs avec un petit foret affutûˋ û 45ô¯. La Fig.36 est trompeuse. Photographiûˋe en ô¨ô macroô ô£ cette piû´ce ressemble û une grosse poutre de chantier de charpentes mûˋtalliques. Elle est minuscule. Observez au passage que le tenon de gauche est lûˋgû´rement plus long que celui de droite ce qui pour l’application envisagûˋe est du reste sans importance.
Constats mûˋcaniques et rectifications des piû´ces de l’ossature.
Compte tenu des petites dimensions des piû´ces fournies, il faut peu de chose pour que ô¨ô ûÏa coinceô ô£. Nous sommes dans le domaine de production en sûˋrie pour des applications ô¨ô grand publicô ô£. Autrement dit les coû£ts de fabrication sont tirûˋs vers le bas au maximum. Ce que nous recevons avec le KIT a le grand mûˋrite de nous 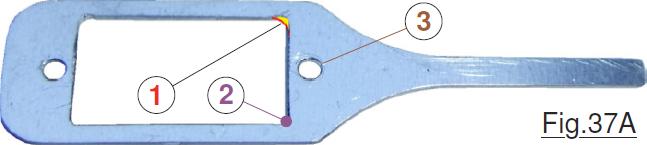 ûˋpargner la crûˋation de petites piû´ces pas forcûˋment û la portûˋe de tous les bricoleurs. Ceci ûˋtant prûˋcisûˋ, il nous faut les peaufiner pour les rendre utilisables. Deux types de corrections seront indispensables. Le premier est relatif aux ouvertures dans lesquels sont logûˋs les servomoteurs. Les angles dûˋcoupûˋs prûˋsentent un petit arrondi comme soulignûˋ en rouge en 1 sur la Fig.37A qu’il faut impûˋrativement ûˋliminer. En effet, les corps des servomoteurs sont parfaitement anguleux et refusent de s’insûˋrer dans les ouvertures ou les encoches. Donc tous les coins tels que 2 doivent
ûˋpargner la crûˋation de petites piû´ces pas forcûˋment û la portûˋe de tous les bricoleurs. Ceci ûˋtant prûˋcisûˋ, il nous faut les peaufiner pour les rendre utilisables. Deux types de corrections seront indispensables. Le premier est relatif aux ouvertures dans lesquels sont logûˋs les servomoteurs. Les angles dûˋcoupûˋs prûˋsentent un petit arrondi comme soulignûˋ en rouge en 1 sur la Fig.37A qu’il faut impûˋrativement ûˋliminer. En effet, les corps des servomoteurs sont parfaitement anguleux et refusent de s’insûˋrer dans les ouvertures ou les encoches. Donc tous les coins tels que 2 doivent 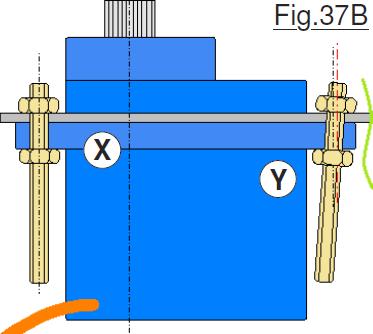 ûˆtre limûˋs û angles droits. Le deuxiû´me type de difficultûˋ est reprûˋsentûˋ sur la Fig.37B sur laquelle un moteur est immobilisûˋ sur une piû´ce de la structure. L’entraxe entre les deux trous percûˋs sur la piû´ce en aluminium n’est pas exactement identique û celui des deux trous de passage des vis sur la semelle du moteur. Le premier boulon en X se place correctement. Le deuxiû´me par contre, comme en Y, soit n’acceptera pas de traverser l’ensemble, soit se positionnera en biais la portûˋe des ûˋcrous ûˋtant alors incorrecte. Il importe donc de passer en revue l’intûˋgralitûˋ des implantations de la motorisation, et d’allonger le juste ce qu’il faut les trous de passage des vis rûˋcalcitrantes. C’est le cas en 3 sur la Fig.37 qui montre que trû´s peu d’allongement est suffisant pour nous sortir de ce mauvais pas.
ûˆtre limûˋs û angles droits. Le deuxiû´me type de difficultûˋ est reprûˋsentûˋ sur la Fig.37B sur laquelle un moteur est immobilisûˋ sur une piû´ce de la structure. L’entraxe entre les deux trous percûˋs sur la piû´ce en aluminium n’est pas exactement identique û celui des deux trous de passage des vis sur la semelle du moteur. Le premier boulon en X se place correctement. Le deuxiû´me par contre, comme en Y, soit n’acceptera pas de traverser l’ensemble, soit se positionnera en biais la portûˋe des ûˋcrous ûˋtant alors incorrecte. Il importe donc de passer en revue l’intûˋgralitûˋ des implantations de la motorisation, et d’allonger le juste ce qu’il faut les trous de passage des vis rûˋcalcitrantes. C’est le cas en 3 sur la Fig.37 qui montre que trû´s peu d’allongement est suffisant pour nous sortir de ce mauvais pas.
Visserie incorrecte.
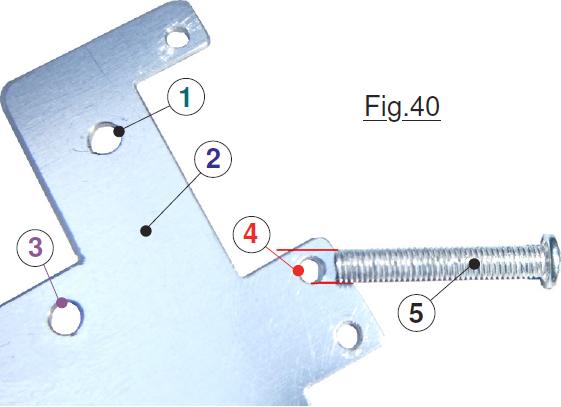
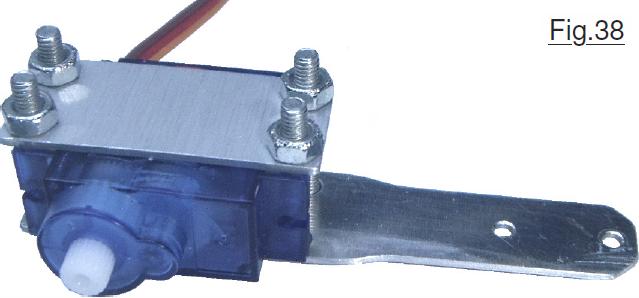 L’avantage d’un KIT c’est qu’il contient gûˋnûˋralement tout ce dont on peut avoir besoin. Dans le colis contenant les petites piû´ces mûˋcanique du squelette, on trouve ûˋgalement une flopûˋe de petits boulons de û 2,5mm en nombre suffisant pour tout assembler … en principe. Si ces derniers conviennent parfaitement pour les moteurs bridûˋs comme sur la Fig.38, il en va tout autrement pour l’assemblage des moteurs sur les autres piû´ces. Dûˋjû quand on consulte la Fig 39 on constate visuellement que sur la semelle des servomoteurs le trou de passage ne fait que 2mm de diamû´tre. Les vis de ûû,5mm refusent obstinûˋment de traverser, sauf si l’on s’aide d’un marteau ! Une solution consisterait û tarauder le trou de passage des vis û f û,5mm cette option a toutefois ûˋtûˋ ûˋcartûˋe pour deux raisons. La premiû´re û cause du fait que le trou n’est pas cylindrique, la semelle est fendue. Pour la rûˋsistance du matûˋriau le tenon risquerait de s’ûˋcarter. On repercerait ûˋvidemment le trou û environ 2,7 mm de diamû´tre. Mais la tûˆte de vis n’aurait pas assez de place entre le trou et le corps du moteur. Il est manifeste que sur le chûÂssis les trous de liaison pour fixer les moteurs sont bien plus petits que ceux des vis û M2,5. Sur la Fig.40 on voit en 2 le chûÂssis avec en 1 le trou de û 3mm û travers lequel passera la vis qui solidarise en dessous le bouclier de protection. En 3 un trou ûˋgalement de 3mm de diamû´tre pour immobiliser la petite plaque qui sur le dessus soutiendra le module multiplexeur. Enfin en 4 il est visuel que le trou prûˋvu pour la liaison des servomoteurs est plus petit que la vis 5 de diamû´tre û M2,5. Manifestement la partie filetûˋe est plus grande que le trou de passage. Cette visserie n’est donc pas utilisable.
L’avantage d’un KIT c’est qu’il contient gûˋnûˋralement tout ce dont on peut avoir besoin. Dans le colis contenant les petites piû´ces mûˋcanique du squelette, on trouve ûˋgalement une flopûˋe de petits boulons de û 2,5mm en nombre suffisant pour tout assembler … en principe. Si ces derniers conviennent parfaitement pour les moteurs bridûˋs comme sur la Fig.38, il en va tout autrement pour l’assemblage des moteurs sur les autres piû´ces. Dûˋjû quand on consulte la Fig 39 on constate visuellement que sur la semelle des servomoteurs le trou de passage ne fait que 2mm de diamû´tre. Les vis de ûû,5mm refusent obstinûˋment de traverser, sauf si l’on s’aide d’un marteau ! Une solution consisterait û tarauder le trou de passage des vis û f û,5mm cette option a toutefois ûˋtûˋ ûˋcartûˋe pour deux raisons. La premiû´re û cause du fait que le trou n’est pas cylindrique, la semelle est fendue. Pour la rûˋsistance du matûˋriau le tenon risquerait de s’ûˋcarter. On repercerait ûˋvidemment le trou û environ 2,7 mm de diamû´tre. Mais la tûˆte de vis n’aurait pas assez de place entre le trou et le corps du moteur. Il est manifeste que sur le chûÂssis les trous de liaison pour fixer les moteurs sont bien plus petits que ceux des vis û M2,5. Sur la Fig.40 on voit en 2 le chûÂssis avec en 1 le trou de û 3mm û travers lequel passera la vis qui solidarise en dessous le bouclier de protection. En 3 un trou ûˋgalement de 3mm de diamû´tre pour immobiliser la petite plaque qui sur le dessus soutiendra le module multiplexeur. Enfin en 4 il est visuel que le trou prûˋvu pour la liaison des servomoteurs est plus petit que la vis 5 de diamû´tre û M2,5. Manifestement la partie filetûˋe est plus grande que le trou de passage. Cette visserie n’est donc pas utilisable.
 La seule solution ô¨ô propreô ô£ consiste û trouver des boulons, des tiges filetûˋes et les ûˋcrous associûˋe pour un diamû´tre de û M1,5. Et encore, avec de telles vis pour le moins pas trû´s courantes, il faut lûˋgû´rement agrandir les trous de passage pour qu’elles puissent traverser librement. Je vous souhaite de trouver facilement une adresse sur Internet pour approvisionner ce type d’accastillage. Pour ma part je n’ai pas trouvûˋ, ceci dit, il y a longtemps que vous savez que dans ce domaine je ne suis pas du tout dûˋgourdi …
La seule solution ô¨ô propreô ô£ consiste û trouver des boulons, des tiges filetûˋes et les ûˋcrous associûˋe pour un diamû´tre de û M1,5. Et encore, avec de telles vis pour le moins pas trû´s courantes, il faut lûˋgû´rement agrandir les trous de passage pour qu’elles puissent traverser librement. Je vous souhaite de trouver facilement une adresse sur Internet pour approvisionner ce type d’accastillage. Pour ma part je n’ai pas trouvûˋ, ceci dit, il y a longtemps que vous savez que dans ce domaine je ne suis pas du tout dûˋgourdi …
L’anatomie de la petite sonde.
Poursuivre ce didacticiel va inûˋvitablement nous imposer de dûˋtailler les mouvements du petit insecte. Pour dûˋcrire les approches de l’animation de cette machine robotisûˋe, il faudra que nous ayons un langage commun pour en dûˋsigner les organes fonctionnels participant û la motricitûˋ. Bien que souvent il sera fait rûˋfûˋrences aux pattes du petit animal, pour la dûˋsignation officielle des ûˋlûˋments fondamentaux je vous propose un parallû´le osûˋ avec les jambes du genre humain. Nous allons dans ce petit chapitre dûˋfinir une terminologie commune aussi simple et ûˋvocatrice que possible, ûˋvitant pour la suite du didacticiel d’avoir en permanence û utiliser la Fiche nô¯7ô nommûˋe Repûˋrage et caractûˋristiques des articulations pour savoir de quel membre ou de quelle articulation il est question. Cette fiche en outre prûˋcisera aussi les rûˋfûˋrences des moteurs qui animent les diffûˋrentes articulations du petit insecte.
Comme ce sont les moteurs immobilisûˋs sur le chûÂssis qui globalement assureront les translations longitudinales, comme pour les humains leurs articulations seront nommûˋes les Hanches. Du coup le membre associûˋ devient le Fûˋmur. Entre le Fûˋmur et le Tibia on trouve ô¨ô naturellementô ô£ le genou. Pour le bas de la Jambe nous rencontrons un petit problû´me pour choisir les mots. 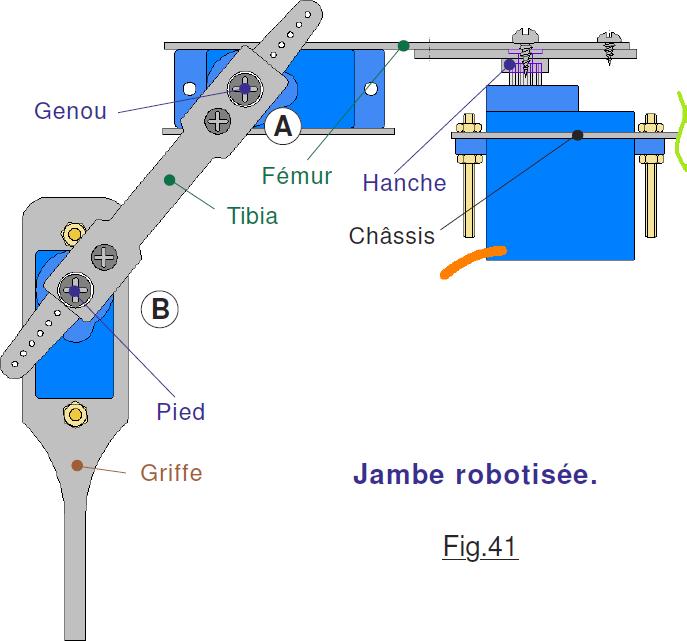 Pour l’articulation il serait possible d’employer les vocables savants relatifs û la mobilitûˋ infûˋrieure de notre corps … bien trop compliquûˋ ! Aussi, ce qui permettra de bouger la piû´ce du bas sera nommûˋ le Pied. Comme il faut ûˋgalement affecter un identificateur û la piû´ce mûˋcanique qui viendra en contact avec le sol, nous allons ici faire le parallû´le avec la gente animale. Je propose de dûˋsigner cette terminaison par le mot Griffe. Oui, je sais que ce mûˋlange des genres n’est pas totalement cohûˋrent. Malgrûˋ tout, nous ne sommes pas dans le cadre d’une soutenance de thû´se sur la morphologie, aussi je vous prie d’accepter ce triste compromis.
Pour l’articulation il serait possible d’employer les vocables savants relatifs û la mobilitûˋ infûˋrieure de notre corps … bien trop compliquûˋ ! Aussi, ce qui permettra de bouger la piû´ce du bas sera nommûˋ le Pied. Comme il faut ûˋgalement affecter un identificateur û la piû´ce mûˋcanique qui viendra en contact avec le sol, nous allons ici faire le parallû´le avec la gente animale. Je propose de dûˋsigner cette terminaison par le mot Griffe. Oui, je sais que ce mûˋlange des genres n’est pas totalement cohûˋrent. Malgrûˋ tout, nous ne sommes pas dans le cadre d’une soutenance de thû´se sur la morphologie, aussi je vous prie d’accepter ce triste compromis.
La suite est ici.