 Largement de quoi devenir fĂŠbrile et nerveux. En effet, dĂŠjĂ 38 pages de didacticiel et nous n’avons pas encore assemblĂŠ la future sonde martienne. Le grand jour est arrivĂŠ. Les ĂŠtudes d’optimisation sont achevĂŠes, les personnels de la salle S2 ont fait du bon travail. Les imprimantes ont crachĂŠ les dessins et les protocoles de montage Ă respecter. Liasse de document sous le bras je me rends Ă la salle d’assemblage S5. Elle jouxte S1 mais l’entrĂŠe se fait par un sas ÂŤÂ de dĂŠcontamination . Tout ce qui y pĂŠnètre a ĂŠtĂŠ au prĂŠalable parfaitement nettoyĂŠ et dĂŠcontaminĂŠ. On y travaille avec charlotte, gants blancs et sur-chaussures. Les techniciens ont ĂŠtalĂŠs, bien triĂŠs sur les ĂŠtablis, les divers ĂŠlĂŠments
Largement de quoi devenir fĂŠbrile et nerveux. En effet, dĂŠjĂ 38 pages de didacticiel et nous n’avons pas encore assemblĂŠ la future sonde martienne. Le grand jour est arrivĂŠ. Les ĂŠtudes d’optimisation sont achevĂŠes, les personnels de la salle S2 ont fait du bon travail. Les imprimantes ont crachĂŠ les dessins et les protocoles de montage Ă respecter. Liasse de document sous le bras je me rends Ă la salle d’assemblage S5. Elle jouxte S1 mais l’entrĂŠe se fait par un sas ÂŤÂ de dĂŠcontamination . Tout ce qui y pĂŠnètre a ĂŠtĂŠ au prĂŠalable parfaitement nettoyĂŠ et dĂŠcontaminĂŠ. On y travaille avec charlotte, gants blancs et sur-chaussures. Les techniciens ont ĂŠtalĂŠs, bien triĂŠs sur les ĂŠtablis, les divers ĂŠlĂŠments
de la structure de la sonde. On va pouvoir commencer. L’ordre des opĂŠrations n’est absolument pas quelconque, il est conçu pour minimiser les manipulations et surtout ĂŠviter d’excorier le matĂŠriel.
RĂŠaliser des sous-ensembles.
Techniquement on va commencer par rĂŠaliser des petits sous modules, puis le corps principal. Ensuite, on viendra complĂŠter le corps principal par les diverses Jambes. Par exemple sur la Fig.64 on a prĂŠparĂŠ les quatre Tibias. Toutefois, avant de pouvoir les apprĂŞter, il faut modifier lĂŠgèrement les palonniers. En effet, bien que ce ne soit pas totalement impossible, utiliser ces ĂŠlĂŠments tels qu’ils 
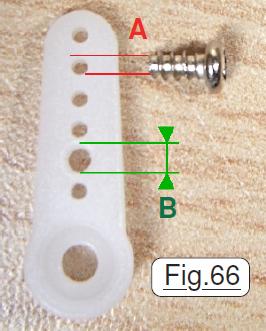 sont livrĂŠs pour y serrer la petite vis qui supporte les efforts de torsion confine Ă une galère sans nom. ConsidĂŠrons la Fig.65 qui reprĂŠsente en coupe transversale l’un des ĂŠlĂŠments cruciforme. En 1 on voit la vis la plus grande (Celle qui prĂŠsente une petite collerette d’appui.) qui immobilise le total sur le moyeu dentelĂŠ de l’arbre moteur. En 2 se trouve la petite vis qui sert Ă transmettre le couple. Sur la Fig.66 il est
sont livrĂŠs pour y serrer la petite vis qui supporte les efforts de torsion confine Ă une galère sans nom. ConsidĂŠrons la Fig.65 qui reprĂŠsente en coupe transversale l’un des ĂŠlĂŠments cruciforme. En 1 on voit la vis la plus grande (Celle qui prĂŠsente une petite collerette d’appui.) qui immobilise le total sur le moyeu dentelĂŠ de l’arbre moteur. En 2 se trouve la petite vis qui sert Ă transmettre le couple. Sur la Fig.66 il est  manifeste que les petits trous situĂŠs en ligne sont plus petits que le noyau de la petite vis A. C’est la raison pour laquelle, comme en B tous les trous qui servent Ă recevoir la petite vis sur les palonniers
manifeste que les petits trous situĂŠs en ligne sont plus petits que le noyau de la petite vis A. C’est la raison pour laquelle, comme en B tous les trous qui servent Ă recevoir la petite vis sur les palonniers  ont ĂŠtĂŠ lĂŠgèrement agrandis. Pas grand chose Ă dire sur la prĂŠparation des Griffes. On fixe le moteur d’un cotĂŠ ou de l’autre, c’est sans importance puisque ces pièces sont symĂŠtriques. Pour mĂŠmoire la rĂŠfĂŠrence de la Jambe Ă laquelle elle appartient est inscrite sur la Griffe. Au moment d’assembler on n’aura pas besoin de vĂŠrifier le numĂŠro du moteur qui lui est affectĂŠ.
ont ĂŠtĂŠ lĂŠgèrement agrandis. Pas grand chose Ă dire sur la prĂŠparation des Griffes. On fixe le moteur d’un cotĂŠ ou de l’autre, c’est sans importance puisque ces pièces sont symĂŠtriques. Pour mĂŠmoire la rĂŠfĂŠrence de la Jambe Ă laquelle elle appartient est inscrite sur la Griffe. Au moment d’assembler on n’aura pas besoin de vĂŠrifier le numĂŠro du moteur qui lui est affectĂŠ.
Facile ĂŠgalement d’assembler les moteurs sur les FĂŠmur. On commence par placer la bride et les quatre boulons. Pour des raisons esthĂŠtiques les tĂŞtes de vis sont sur le dessus. Puis on insère le moteur en prenant soin de placer la sortie du bon cotĂŠ. Veillez comme sur la Fig.68 Ă bien repĂŠrer sur quel membre va cet ĂŠlĂŠment, car une fois que la bride 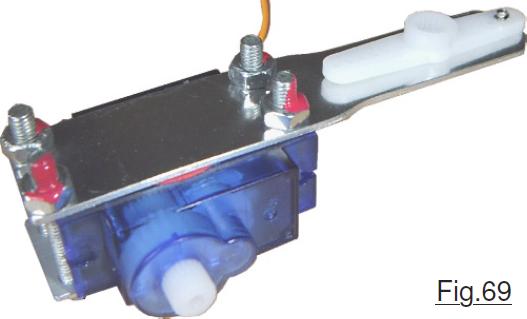 est serrĂŠe on ne voit plus la pastille de traçabilitĂŠ. Au moment de fusionner le total sur le corps … il n’y a plus qu’Ă dĂŠbrider !
est serrĂŠe on ne voit plus la pastille de traçabilitĂŠ. Au moment de fusionner le total sur le corps … il n’y a plus qu’Ă dĂŠbrider !
ATTENTION : La bride et la pièce du FĂŠmur sont en porte Ă faux. Il faut serrer vraiment très modĂŠrĂŠment les boulons, sous peine de faire cintrer les deux plaques d’aluminium. Donc, comme bien visible sur la Fig.69 une bonne larme de vernis Ă ongles vient freiner ces liaisons. Passons maintenant au montage du corps de l’insecte voyageur.
Assemblage du corps de JEKERT.
Disposer du module principal fait plaisir, car sous peu on y ajoutera les Jambes et la belle sonde prĂŠsentera un aspect prometteur. Il ne restera plus que l’intĂŠgration de l’ordinateur et des expĂŠriences embarquĂŠes, et elle pourra prendre son envol. Enfin, pas tout Ă fait car sans les programmes elle ne constitue qu’un gros paquet de haute technologie inerte et stĂŠrile.
Quel plaisir intense, que de pouvoir admirer le corps complet de la sonde en Fig.70 autrement que sur des dessins pas toujours faciles Ă interprĂŠter. Faisons ensembles le tour du propriĂŠtaire :
En 3 se cache le châssis sur lequel sont serrÊs les boulons à M3 en 2 qui assurent la liaison complète et rigide avec le bouclier 10. En 1 on a oubliÊ une vis de liaison avec le FÊmur. Les boulons à M3 en 4 assurent la liaison entre la plaque 5 et le châssis 3. On reconnaÎt en 6 le bornier qui sera rÊuni à la centrale Êlectrique par des conducteurs de sections suffisantes. Le moteur de Hanche 7 doit
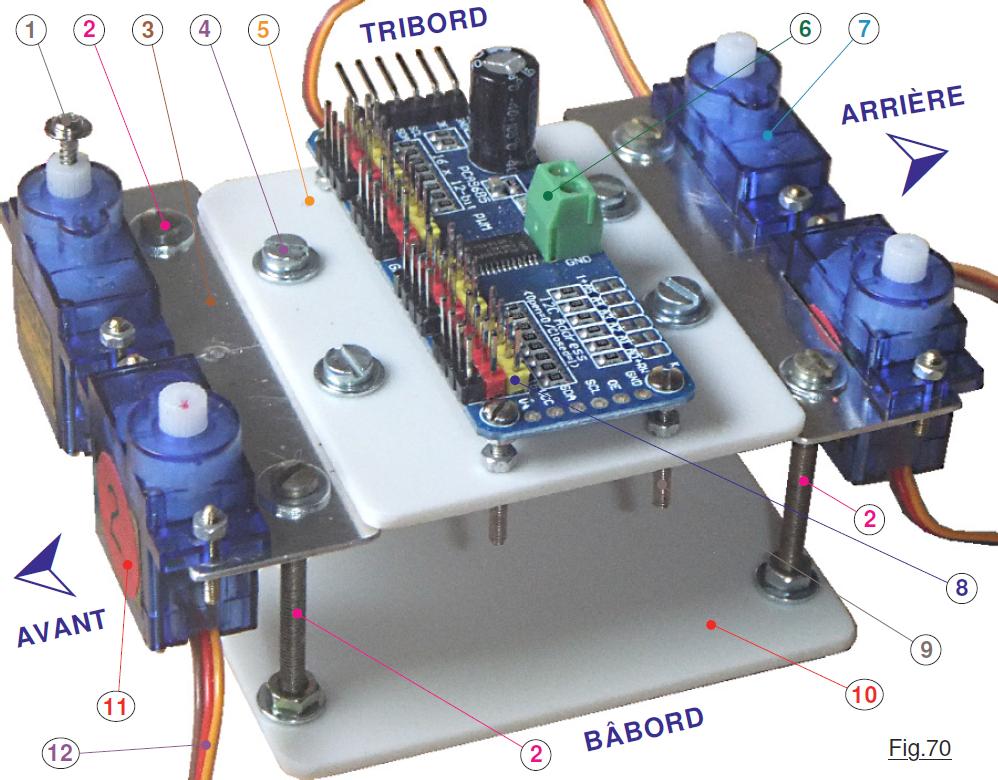 avoir sa semelle sur le dessus et son arbre de sortie vers l’extĂŠrieur. En 8 surtout ne pas brancher les liaisons moteur 12 sur le multiplexeur, la mise sous tension pourrait engendrer un joyeux cafouillage avec des collisions. Nous procĂŠderons moteur par moteur avec vĂŠrification en temps rĂŠel. En 9 les vis Ă M1,5 n’ont pour le moment pas ĂŠtĂŠ raccourcies. Elles ne le seront que vers la fin des intĂŠgrations ĂŠlectroniques et uniquement si elles gĂŞnent. Notez en 11 la prĂŠsence de la petite pastille qui identifie le moteur pour sa traçabilitĂŠ. Pour l’heure le bouclier 10 est ÂŤÂ vierge , c’est Ă dire qu’il n’est pas encore percĂŠ pour le passage des vis Ă M3 qui soutiendront le circuit imprimĂŠ du calculateur.
avoir sa semelle sur le dessus et son arbre de sortie vers l’extĂŠrieur. En 8 surtout ne pas brancher les liaisons moteur 12 sur le multiplexeur, la mise sous tension pourrait engendrer un joyeux cafouillage avec des collisions. Nous procĂŠderons moteur par moteur avec vĂŠrification en temps rĂŠel. En 9 les vis Ă M1,5 n’ont pour le moment pas ĂŠtĂŠ raccourcies. Elles ne le seront que vers la fin des intĂŠgrations ĂŠlectroniques et uniquement si elles gĂŞnent. Notez en 11 la prĂŠsence de la petite pastille qui identifie le moteur pour sa traçabilitĂŠ. Pour l’heure le bouclier 10 est ÂŤÂ vierge , c’est Ă dire qu’il n’est pas encore percĂŠ pour le passage des vis Ă M3 qui soutiendront le circuit imprimĂŠ du calculateur.
Liaison des membres sur le corps de la sonde.
Phase particulièrement ĂŠmoustillante, car mĂŠcaniquement JEKERT sera complète et prĂŠsentera son apparence dĂŠfinitive. Du reste, quand l’ensemble sera complet, toutes les ĂŠquipes vont se rĂŠunir pour faire les photographies de famille. Ce sera la dernière fois que les personnels n’ayant pas l’habilitation de plus haut niveau pourront la cĂ´toyer. Ensuite, la belle machine sera entièrement dĂŠpolluĂŠe, aseptisĂŠe et mise sous cloche dans la ÂŤÂ salle blanche  …
PREMIĂRE ĂTAPE : PrĂŠparer chaque membre.
@ : Piloter chaque servomoteur pour le placer au neutre opĂŠrationnel. Dans ce but on utilisera le programme P02_Test_de_base_du_Multiplexeur.ino qui reste parfaitement adaptĂŠ pour effectuer cette manipulation. Il suffit de brancher le moteur sur l’une quelconque des sorties.
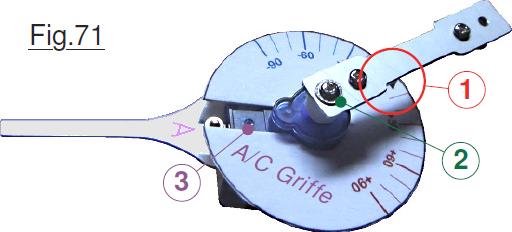 1) Par la procĂŠdure @ placer au zĂŠro le moteur du Pied. Placer le Tibia sur la Griffe comme le montre la Fig.71 avec prĂŠsence du disque graduĂŠ spĂŠcifique aux deux membres A et C. Remarquez que le disque graduĂŠ en carton 3 est fendu Ă la largeur du bossage situĂŠ sur le servomoteur. Il est alors facile de l’insĂŠrer ou de le retirer Ă convenance lors des nombreuses manipulations qui seront conduites sur la sonde. Avant de serrer la vis 2 il faut placer le Tibia avec le dĂŠphasage correct sur l’arbre dentelĂŠ. Moteur au zĂŠro opĂŠrationnel il suffit d’orienter l’ĂŠlĂŠment pour que l’axe du Tibia soit exactement au dessus de la graduation zĂŠro en 1 du petit disque des repères angulaires. ATTENTION c’est le tenon court qu’il faut assembler si l’on veut respecter les protocoles.
1) Par la procĂŠdure @ placer au zĂŠro le moteur du Pied. Placer le Tibia sur la Griffe comme le montre la Fig.71 avec prĂŠsence du disque graduĂŠ spĂŠcifique aux deux membres A et C. Remarquez que le disque graduĂŠ en carton 3 est fendu Ă la largeur du bossage situĂŠ sur le servomoteur. Il est alors facile de l’insĂŠrer ou de le retirer Ă convenance lors des nombreuses manipulations qui seront conduites sur la sonde. Avant de serrer la vis 2 il faut placer le Tibia avec le dĂŠphasage correct sur l’arbre dentelĂŠ. Moteur au zĂŠro opĂŠrationnel il suffit d’orienter l’ĂŠlĂŠment pour que l’axe du Tibia soit exactement au dessus de la graduation zĂŠro en 1 du petit disque des repères angulaires. ATTENTION c’est le tenon court qu’il faut assembler si l’on veut respecter les protocoles.
2) Par la procĂŠdure @ placer au zĂŠro le moteur du Genou. Nous avons vu en Fig.60 que le dĂŠphasage pour ces articulations est nul. Le positionnement correct du moyeu sur l’arbre dentelĂŠ consiste Ă orienter l’axe longitudinal (ColoriĂŠ en jaune sur la Fig.72) pour qu’il soit dans  l’alignement avec l’axe transversal du moteur coloriĂŠ en rouge. S’il n’y a pas eu d’erreurs lors du montage de la Griffe c’est le tenon long du Tibia qui se trouve Ă l’encastrement en cours de solidarisation.
l’alignement avec l’axe transversal du moteur coloriĂŠ en rouge. S’il n’y a pas eu d’erreurs lors du montage de la Griffe c’est le tenon long du Tibia qui se trouve Ă l’encastrement en cours de solidarisation.
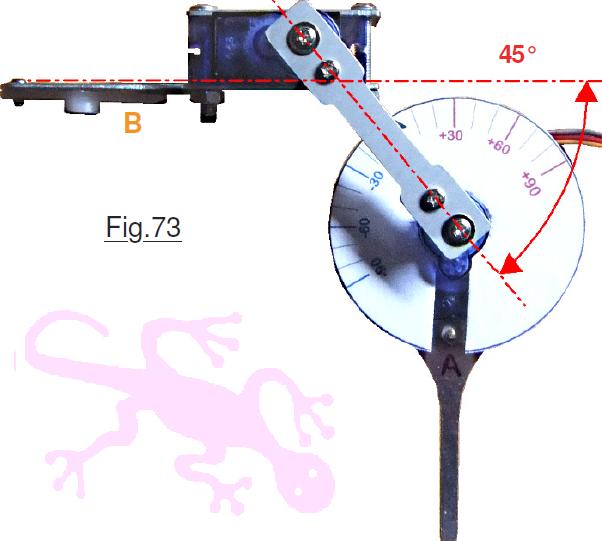
3) RĂŠaliser ces deux liaisons sur chaque membre de JEKERT. Lorsque les deux articulations sont achevĂŠes, positionner les trois ĂŠlĂŠments en ÂŤÂ Configuration Stable Raisonnable . MontrĂŠe sur la Fig.73 c’est une posture pour laquelle le Tibia est Ă 45° du FĂŠmur et la Griffe Ă angle droit par rapport au FĂŠmur. Cette disposition dĂŠgagera suffisamment les membres du dessous et diminuera l’amplitude de la surface couverte par l’ensemble. Durant ces travaux des Griffes trop dispersĂŠes vers la pĂŠriphĂŠrie seraient en danger potentiel de chocs avec l’environnement, il est prĂŠfĂŠrable de les rĂŠtracter. La Fig.73 prĂŠsente cette posture dont il sera question lors des dĂŠveloppements logiciels.
 DEUXIĂME ĂTAPE : Assembler les membres sur les hanches.
DEUXIĂME ĂTAPE : Assembler les membres sur les hanches.
NOTE : C’est au cours de ces manipulations qu’un petit dĂŠtail qui m’avait ĂŠchappĂŠ c’est rĂŠvĂŠlĂŠ comme ĂŠtant impĂŠrativement Ă prendre en compte. Contrairement Ă tous les dessins des ĂŠpures rencontrĂŠes jusqu’Ă ce jour Julien 58023, les palonniers cruciforme ne sont pas symĂŠtriques longitudinalement. Le cotĂŠ B prĂŠsente un trou de plus que le cotĂŠ A. (Voir Fig.74) cotĂŠ a un trou de plus que l’autre. Prendre pour l’assemblage le cotĂŠ court A qui correspond au perçage sur les fĂŠmurs, le cotĂŠ le plus long B ĂŠtant orientĂŠ vers le genou.
1) Par la procĂŠdure @ placer au zĂŠro le moteur de la Hanche. Mettre en place le disque graduĂŠ correspondant Ă la Jambe en cours d’assemblage.
2) EmboĂŽter le moyeu dentelĂŠ sur l’arbre de sortie du moteur en orientant le FĂŠmur pour que son axe longitudinal soit bien au dessus du repère zĂŠro du petit disque graduĂŠ.
3) Pour chaque Jambe tester l’amplitude des dĂŠbattements et leurs limites pour vĂŠrifier la conformitĂŠ avec les positions limites espĂŠrĂŠes sur les ĂŠpures de prĂŠdĂŠtermination. Durant ces manipulations procĂŠdez avec pondĂŠration. C’est de la petite mĂŠcanique, surtout ne pas serrer exagĂŠrĂŠment. Bien bloquer le palonnier et l’ĂŠlĂŠment Ă assembler pour ne pas forcer sur les moteurs.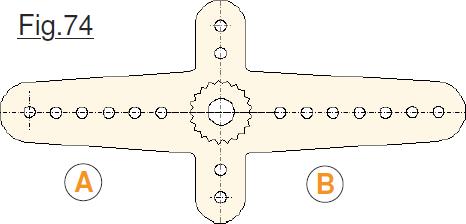
NOTE : Durant l’assemblage, vous allez constater qu’il n’est pas toujours possible d’orienter la pièce mĂŠcanique exactement au dessus du repère zĂŠro sur le disque graduĂŠ. Il pourra y avoir un ĂŠcart jusqu’Ă environ 5°. Ce n’est pas très important, mais tant qu’Ă faire choisissez lâemboĂŽtement du cotĂŠ qui conduira Ă l’ĂŠcart angulaire le plus faible.
DANGER : Conduisant les essais et les vĂŠrifications, on va utiliser le potentiomètre pour animer l’articulation testĂŠe. Surtout, faire bien attention quand la position angulaire approche de +90°. En effet, nous avons constatĂŠ lors de la dĂŠtermination des caractĂŠristiques des moteurs que dĂŠpasser un peu trop cette orientation fait diverger l’automatisme. Le moteur part en rotation continue et si l’on ne revient pas rapidement en arrière il ira en butĂŠe sur le mĂŠcanisme testĂŠ. Franchement il peut se coincer avec ĂŠnergie. Pour le dĂŠbloquer on devra forcer et il n’aimera pas du tout. Donc titillez le bouton du potentiomètre avec parcimonie, et soyez prĂŞt pour activer le bouton de panique.
OUF !
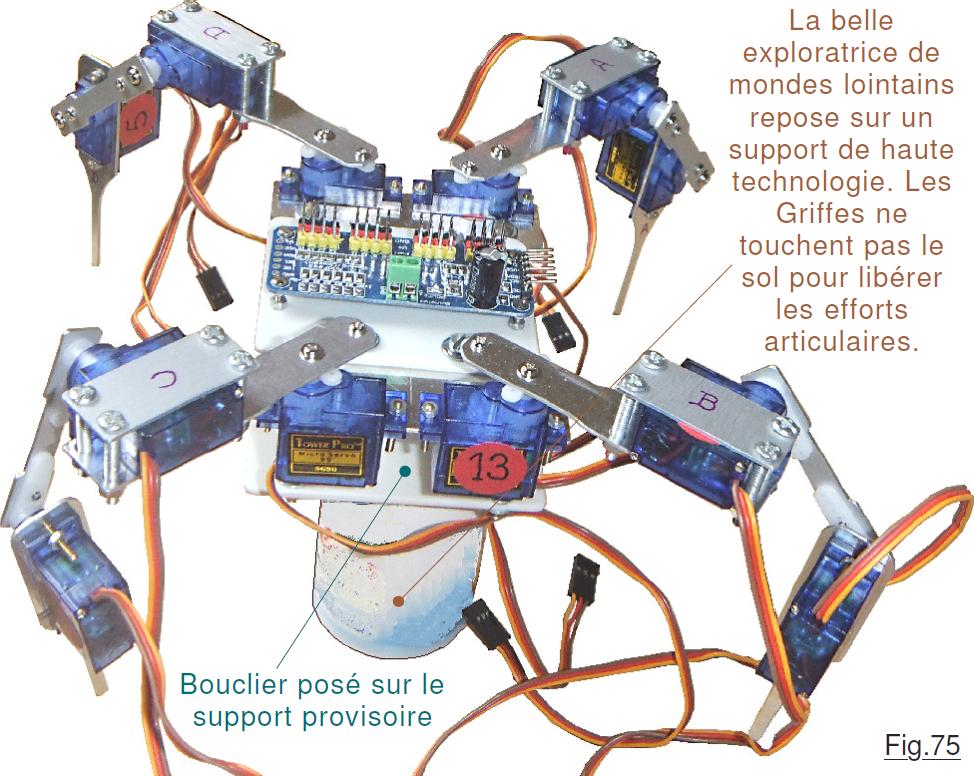
Nous y sommes enfin. La belle JEKERT trĂ´ne avec ĂŠlĂŠgance sur son support d’atelier. Les pattes ne touchent pas le sol. Le moment n’est pas encore venu de la poser Ă terre et de soumettre ses membres aux efforts qu’ils devront supporter par la suite. Toutes les ĂŠquipes ont ĂŠtĂŠ rassemblĂŠes dans la salle de rĂŠunion. Un buffet bien garni avec ce qu’il faut en fluides pour l’accompagner nous attend, car pour fĂŞter cet ĂŠvènement la NDRMSE a bien fait les choses … des petites bulles montent dans les verres sur pieds .
Avant de pouvoir donner libre cours Ă nos conversations, il faut attendre que le Grand patron finisse son discours. Le planning a ĂŠtĂŠ respectĂŠ sans dĂŠpassement de dĂŠlai. Toutes les difficultĂŠs jusqu’Ă prĂŠsent ont ĂŠtĂŠ surmontĂŠes. Nous sommes sereins et demain est un autre
jour : Champagne !
Fin du TOME 1.
Rassurez vous voici la suite avec le TOME 2: JEKERT apprend Ă marcher !