 Programmation globalement comprise, avec P02_Test_de_base_du_Multiplexeur.ino nous allons faire d’une pierre trois ricochets. Le premier bÃĐnÃĐfice va consister à vÃĐrifier que chaque sortie du multiplexeur est opÃĐrationnelle. On va ensuite construire un tableau de caractÃĐristiques pertinentes des moteurs qui sera directement impliquÃĐ dans le dÃĐveloppement logiciel. Enfin, en plaçant un moteur sur chaque sortie, tous pilotÃĐs simultanÃĐment, on va confirmer l’aptitude de l’alimentation de puissance à assurer sa mission avec fiabilitÃĐ.
Programmation globalement comprise, avec P02_Test_de_base_du_Multiplexeur.ino nous allons faire d’une pierre trois ricochets. Le premier bÃĐnÃĐfice va consister à vÃĐrifier que chaque sortie du multiplexeur est opÃĐrationnelle. On va ensuite construire un tableau de caractÃĐristiques pertinentes des moteurs qui sera directement impliquÃĐ dans le dÃĐveloppement logiciel. Enfin, en plaçant un moteur sur chaque sortie, tous pilotÃĐs simultanÃĐment, on va confirmer l’aptitude de l’alimentation de puissance à assurer sa mission avec fiabilitÃĐ.
CaractÃĐristiques pertinentes de chaque moteur.
Contrairement à ce que prÃĐsente le banc de test de la Fig.24 tout le monde ne dispose pas d’un impulsiomÃĻtre prÃĐcis à la ÂĩS. Aussi le petit calculateur de la sonde va dialoguer sur le Moniteur de l’IDE pour vous indiquer sur ‘ÃĐcran du P.C. les valeurs relatives à vos moteurs. Vous serez ainsi parfaitement aptes à obtenir les paramÃĻtres nÃĐcessaires à la programmation. La manipulation est ÃĐlÃĐmentaire. Elle consiste à effectuer dans l’ordre :
âĒ Tourner le bouton du potentiomÃĻtre dont la tension variable est branchÃĐe sur l’entrÃĐe A1 pour que l’Angle de position de consigne 0.00° soit affichÃĐ sur le P.C.
âĒ Brancher un moteur à tester sur lequel on a placÃĐ le petit cadran graduÃĐ entre -120° et +120°.
âĒ Positionner un palonnier en l’insÃĐrant sur les dents de l’arbre de sortie pour que sa direction soit la plus proche possible du zÃĐro thÃĐorique. (Un petit ÃĐcart jusqu’à 10° peut Être inÃĐvitable.)
âĒ Tourner le potentiomÃĻtre pour positionner le palonnier aux deux limites -90° et +90° et noter les diffÃĐrentes valeurs pertinentes qui en dÃĐcoulent.
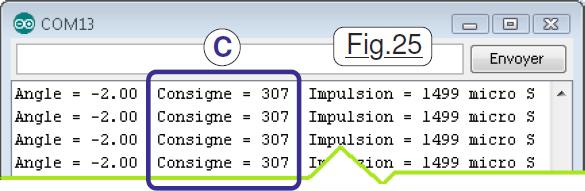 Recommencer cette procÃĐdure pour chaque moteur en changeant de sortie sur le multiplexeur. Pour les deux valeurs de Âą90° ne pas tenir compte de l’Angle affichÃĐ qui n’est significatif que pour positionner le palonnier au neutre. La plage ÃĐtant ÂŦ ÃĐlargie Âŧ les angles indiquÃĐs vers les dÃĐviations extrÊmes sont faux. Ce qu’il faut noter, ce sont les valeurs de consignes C encadrÃĐes dans la Fig.25 en bleu, et ce pour les trois positions caractÃĐristiques, c’est à dire le neutre opÃĐrationnel central et les deux extrÊmes Ã Âą90°. Quand toutes ces valeurs sont rÃĐunies, on les rÃĐsume dans un tableau tel que celui de la Fig.26 en vue de dÃĐfinir la procÃĐdure qui sera chargÃĐe d’animer les muscles mÃĐcaniques du gros insecte.
Recommencer cette procÃĐdure pour chaque moteur en changeant de sortie sur le multiplexeur. Pour les deux valeurs de Âą90° ne pas tenir compte de l’Angle affichÃĐ qui n’est significatif que pour positionner le palonnier au neutre. La plage ÃĐtant ÂŦ ÃĐlargie Âŧ les angles indiquÃĐs vers les dÃĐviations extrÊmes sont faux. Ce qu’il faut noter, ce sont les valeurs de consignes C encadrÃĐes dans la Fig.25 en bleu, et ce pour les trois positions caractÃĐristiques, c’est à dire le neutre opÃĐrationnel central et les deux extrÊmes Ã Âą90°. Quand toutes ces valeurs sont rÃĐunies, on les rÃĐsume dans un tableau tel que celui de la Fig.26 en vue de dÃĐfinir la procÃĐdure qui sera chargÃĐe d’animer les muscles mÃĐcaniques du gros insecte.
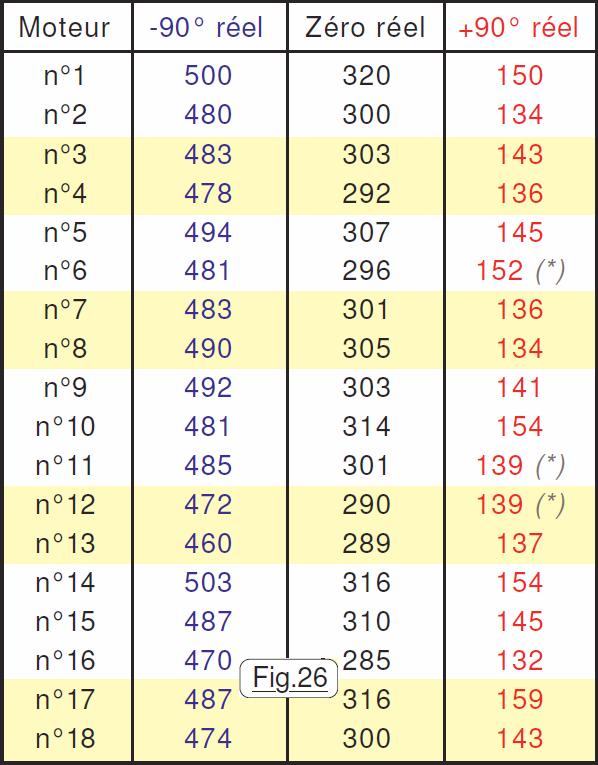 Les symboles (*) sont ajoutÃĐs pour le cas particuliers de moteurs qui n’acceptent pas tout à fait d’aller en toute sÃĐcuritÃĐ Ã la position angulaire de +90°. Le n°6 par exemple arrive à environ 80° avec la valeur de 152 à la limite du seuil de divergence pour lequel le moteur part en rotation continue. Pour le n°11 la limite se produit pour +85° avec une valeur critique juste avant divergence. Pour le n°12 l’angle de la valeur critique est d’environ +85°. Pour ces trois moteurs la plage de rotation est infÃĐrieure à la pleine dÃĐviation thÃĐorique de Âą 90°.
Les symboles (*) sont ajoutÃĐs pour le cas particuliers de moteurs qui n’acceptent pas tout à fait d’aller en toute sÃĐcuritÃĐ Ã la position angulaire de +90°. Le n°6 par exemple arrive à environ 80° avec la valeur de 152 à la limite du seuil de divergence pour lequel le moteur part en rotation continue. Pour le n°11 la limite se produit pour +85° avec une valeur critique juste avant divergence. Pour le n°12 l’angle de la valeur critique est d’environ +85°. Pour ces trois moteurs la plage de rotation est infÃĐrieure à la pleine dÃĐviation thÃĐorique de Âą 90°.
Confirmation de la validation de la centrale ÃĐlectrique.
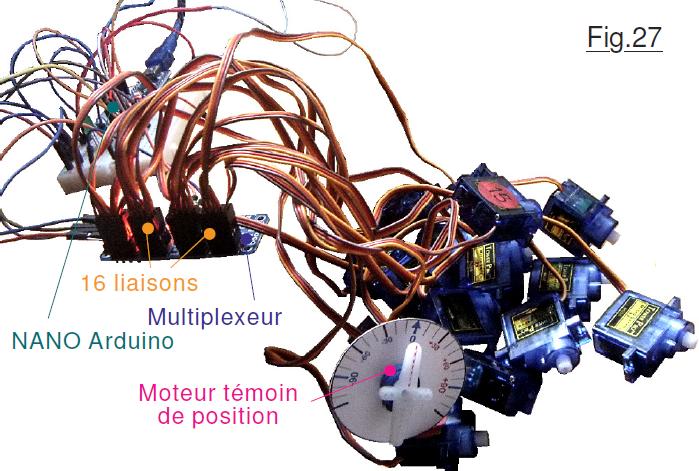
Manipulation particuliÃĻrement aisÃĐe à mettre en Åuvre, on demande aux techniciens de brancher seize moteurs sur l’interface pour en utiliser toutes les sorties. En un rien de temps l’ÃĐtabli ressemble à celui de la Fig.27 le fatras de fils ÃĐtant assez impressionnant. En fait les SG90 sont entassÃĐs les uns sur les autres pour bien faire voir la configuration expÃĐrimentale. Lorsque l’on tourne le bouton du potentiomÃĻtre, mis à part le ralentissement de la boucle de base pour afficher sur l’ÃĐcran vidÃĐo de l’ordinateur, les consignes sont modifiÃĐes trÃĻs rapidement. La boucle de programme qui envoie la consigne sur la ligne I2C est pratiquement instantanÃĐe. Tous les moteurs reçoivent alors simultanÃĐment une consigne identique et dÃĐmarrent collectivement. Sur le galvanomÃĻtre la pointe de courant arrive en butÃĐe vers 1,5A. Cette intensitÃĐ est consommÃĐe pendant toute la rotation, facilement observable quand la consigne angulaire passe rapidement entre les deux valeurs limites. L’appareil de mesure de la Fig.24 ÃĐtant configurÃĐ en voltmÃĻtre analogique, entiÃĻrement ÃĐlectronique, ne prÃĐsente aucune inertie. Il montre que durant ces surintensitÃĐs exagÃĐrÃĐes la tension en sortie de la source d’ÃĐnergie s’effondre aux environs de 4,5V.
NOTE : Cette expÃĐrience à montrÃĐ qu’il faut commencer par placer le moteur au neutre opÃĐrationnel avant de pouvoir caler le palonnier sur l’arbre. Il en sera probablement ainsi pour d’autres manipulations, et en particulier pour l’assemblage de la structure mÃĐcanique de la sonde. Donc, par discipline et anticipation, toutes les expÃĐriences de ce type se termineront par un positionnement au zÃĐro des moteurs, c’est à dire en leur envoyant la consigne de 0.00° angulaire.
 CONCLUSION : Une ÃĐtude prÃĐliminaire semble limiter à quatre ou six le nombre de moteurs qui seront simultanÃĐment sollicitÃĐs. Par ailleurs, seize sont contrÃīlÃĐs alors que pour l’heure JEKERT n’en comportera que douze pour se dÃĐplacer. Les conditions imposÃĐes à la centrale ÃĐlectrique sont donc particuliÃĻrement agressives et trÃĻs ÃĐloignÃĐes du fonctionnement nominal. Cette fonction matÃĐrielle essentielle passe donc avec une trÃĻs large marge de fiabilitÃĐ les tests de validation.
CONCLUSION : Une ÃĐtude prÃĐliminaire semble limiter à quatre ou six le nombre de moteurs qui seront simultanÃĐment sollicitÃĐs. Par ailleurs, seize sont contrÃīlÃĐs alors que pour l’heure JEKERT n’en comportera que douze pour se dÃĐplacer. Les conditions imposÃĐes à la centrale ÃĐlectrique sont donc particuliÃĻrement agressives et trÃĻs ÃĐloignÃĐes du fonctionnement nominal. Cette fonction matÃĐrielle essentielle passe donc avec une trÃĻs large marge de fiabilitÃĐ les tests de validation.
La suite est ici.