Chaque fois qu’un système admet un nombre de variables non dĂ©risoire, l’explosion combinatoire devient impressionnante. Avec seulement trois articulations dans une jambe, on a rapidement constatĂ© que pas moins de 8192 variantes Ă©taient possibles et il n’Ă©tait pas pensable de toutes les envisager. La solution raisonnable a donc consistĂ© Ă effectuer des choix articulation par articulation.
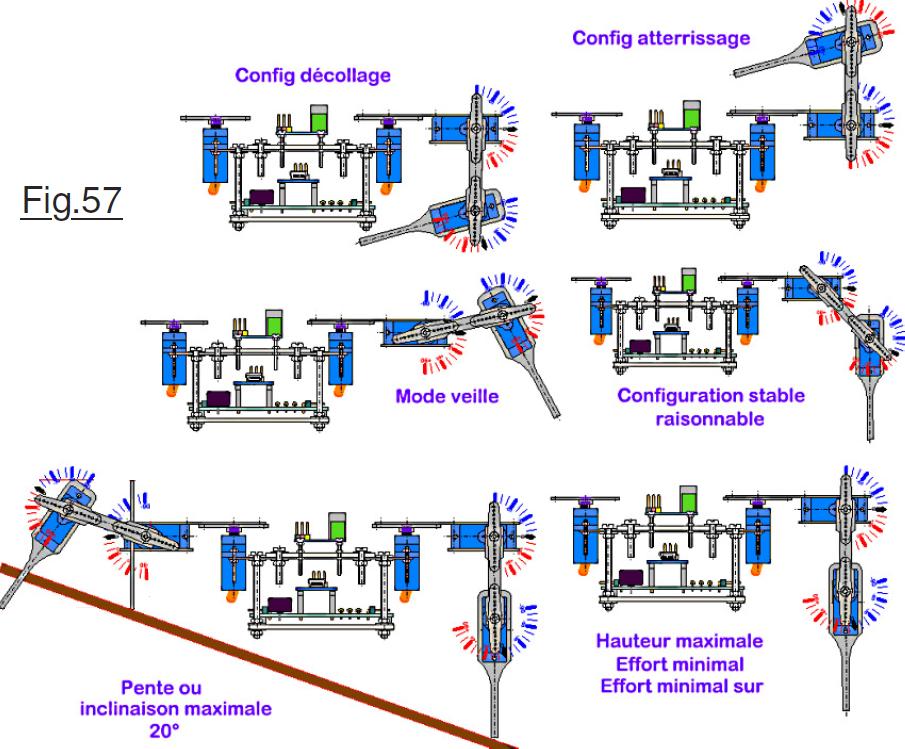 Dans le meilleur des cas, l’amplitude de rotation dans une articulation sera de 180°. La possibilitĂ© de pouvoir positionner le palonnier dans les dentelures quand le moteur est au neutre opĂ©rationnel offre encore une foule considĂ©rable de possibilitĂ©s. Il nous incombe d’exploiter au mieux cette ressource. N’allez surtout pas imaginer que les postures qui vont se voir sĂ©lectionnĂ©es ont Ă©mergĂ© d’un simple claquement de doigt. AffairĂ©s Ă leurs outils de dessins informatiques, les personnels de la salle S2 ont explorĂ© toute une famille de variantes que l’anatomie propre au petit robot autorise. Quand un nombre de configurations significatif a Ă©tĂ© dĂ©veloppĂ©, ces ingĂ©nieurs en conception ont effectuĂ© l’Ă©tude exhaustive de l’optimisation morphologique. Ce que ne rĂ©vèle pas le chapitre prĂ©cĂ©dent, c’est que les choix ont plus ou moins Ă©tĂ©s influencĂ©s par les Ă©valuations cinĂ©matiques initiales. Par exemple sur le brouillon de la Fig.57 vous pouvez observer que les configurations VEILLE et ATTERRISAGE n’ont rien Ă voir avec celles qui seront adoptĂ©es en version dĂ©finitive. Du reste, pour bien vous montrer que l’Ă©volution n’a pas Ă©tĂ© linĂ©aire, dans le chapitre Justification du choix des palonniers on dĂ©cide des Palonniers Courts sur le Tibia alors que sur tous les dessins ils sont reprĂ©sentĂ©s longs. Comme il n’Ă©tait plus question de reprendre tous ces dessins dans le didacticiel, on fait avec, ce qui ne rend pas caduque pour autant les conclusions qui en dĂ©coulent. En rĂ©sumĂ©, pour aboutir Ă un ensemble industriel cohĂ©rent, souvent de nombreuses recherches « discrètes » ont Ă©tĂ© investies. La machine qui rĂ©sulte de ces prĂ©ambules est forcĂ©ment plus performante.
Dans le meilleur des cas, l’amplitude de rotation dans une articulation sera de 180°. La possibilitĂ© de pouvoir positionner le palonnier dans les dentelures quand le moteur est au neutre opĂ©rationnel offre encore une foule considĂ©rable de possibilitĂ©s. Il nous incombe d’exploiter au mieux cette ressource. N’allez surtout pas imaginer que les postures qui vont se voir sĂ©lectionnĂ©es ont Ă©mergĂ© d’un simple claquement de doigt. AffairĂ©s Ă leurs outils de dessins informatiques, les personnels de la salle S2 ont explorĂ© toute une famille de variantes que l’anatomie propre au petit robot autorise. Quand un nombre de configurations significatif a Ă©tĂ© dĂ©veloppĂ©, ces ingĂ©nieurs en conception ont effectuĂ© l’Ă©tude exhaustive de l’optimisation morphologique. Ce que ne rĂ©vèle pas le chapitre prĂ©cĂ©dent, c’est que les choix ont plus ou moins Ă©tĂ©s influencĂ©s par les Ă©valuations cinĂ©matiques initiales. Par exemple sur le brouillon de la Fig.57 vous pouvez observer que les configurations VEILLE et ATTERRISAGE n’ont rien Ă voir avec celles qui seront adoptĂ©es en version dĂ©finitive. Du reste, pour bien vous montrer que l’Ă©volution n’a pas Ă©tĂ© linĂ©aire, dans le chapitre Justification du choix des palonniers on dĂ©cide des Palonniers Courts sur le Tibia alors que sur tous les dessins ils sont reprĂ©sentĂ©s longs. Comme il n’Ă©tait plus question de reprendre tous ces dessins dans le didacticiel, on fait avec, ce qui ne rend pas caduque pour autant les conclusions qui en dĂ©coulent. En rĂ©sumĂ©, pour aboutir Ă un ensemble industriel cohĂ©rent, souvent de nombreuses recherches « discrètes » ont Ă©tĂ© investies. La machine qui rĂ©sulte de ces prĂ©ambules est forcĂ©ment plus performante.
Déphasage entre le palonnier et le neutre opérationnel.
ConsidĂ©rons la Fig.58 sur laquelle les trois servomoteurs reprĂ©sentĂ©s sont au neutre opĂ©rationnel. Dans ce but nous avons envoyĂ© Ă l’asservissement la consigne pour se positionner Ă moitiĂ© dĂ©battement angulaire. Comme nous l’avons fait pour dĂ©terminer les caractĂ©ristiques des moteurs, sur le dessin A est reprĂ©sentĂ© le disque graduĂ© avec le zĂ©ro dans l’axe transversal du moteur. On a calĂ© le palonnier sur le moyeu de façon Ă ce qu’il soit au plus proche de l’axe de symĂ©trie. La sortie de l’arbre moteur est pourvue de 21 dentelures. Il est donc possible de dĂ©caler Ă notre guise de pas angulaires Ă©gaux Ă 360° / 21 » 17°. Par exemple sur le croquis A au lieu de placer le palonnier dans le plan mĂ©dian, on l’a introduit avec deux dentelures de dĂ©calage Ă droite. Quand le moteur sera pilotĂ© au zĂ©ro, le palonnier occupera la 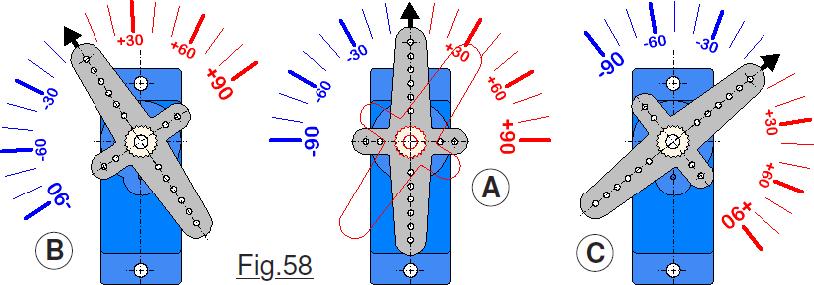 position reprĂ©sentĂ©e par le contour rouge. Nous disposons de ce fait de la possibilitĂ© d’implanter dans 10 orientations diffĂ©rentes le palonnier par rapport au neutre opĂ©rationnel. (Dix = 21 / 2 car sur un demi tour on retrouve la symĂ©trie qui est « identique ».) Par exemple en B on a insĂ©rĂ© Ă deux dentelures Ă gauche soit environ -34° alors qu’en C trois dentelures Ă droite dĂ©calent d’environ +51°. On dispose ainsi d’une facultĂ© bien utile de caler au mieux les Ă©lĂ©ments mĂ©caniques pour optimiser les performances. « ZĂ©ro » dĂ©calĂ©, il devient alors indispensable d’orienter dans le bon sens les disques graduĂ©s pour qu’ils puissent indiquer les angles de rotation par rapport aux consignes et au zĂ©ro de l’asservissement.
position reprĂ©sentĂ©e par le contour rouge. Nous disposons de ce fait de la possibilitĂ© d’implanter dans 10 orientations diffĂ©rentes le palonnier par rapport au neutre opĂ©rationnel. (Dix = 21 / 2 car sur un demi tour on retrouve la symĂ©trie qui est « identique ».) Par exemple en B on a insĂ©rĂ© Ă deux dentelures Ă gauche soit environ -34° alors qu’en C trois dentelures Ă droite dĂ©calent d’environ +51°. On dispose ainsi d’une facultĂ© bien utile de caler au mieux les Ă©lĂ©ments mĂ©caniques pour optimiser les performances. « ZĂ©ro » dĂ©calĂ©, il devient alors indispensable d’orienter dans le bon sens les disques graduĂ©s pour qu’ils puissent indiquer les angles de rotation par rapport aux consignes et au zĂ©ro de l’asservissement.
Optimisation des articulations du châssis : Les Hanches.
Primordiale, la mobilitĂ© des Hanches influencera directement la facultĂ© de JEKERT Ă se mouvoir, et ce autant sur un sol horizontal qu’en pente. (Sans compter Ă©ventuellement des escaliers, la gestion de position du centre de gravitĂ© …) Il importe Ă ce titre de leur octroyer la plus grande amplitude de dĂ©battement possible quitte Ă laisser potentiellement des situations d’interfĂ©rence qui seront gĂ©rĂ©es par logiciel. Par exemple en 6 les deux membres rouge et violet se « mĂ©langent ». 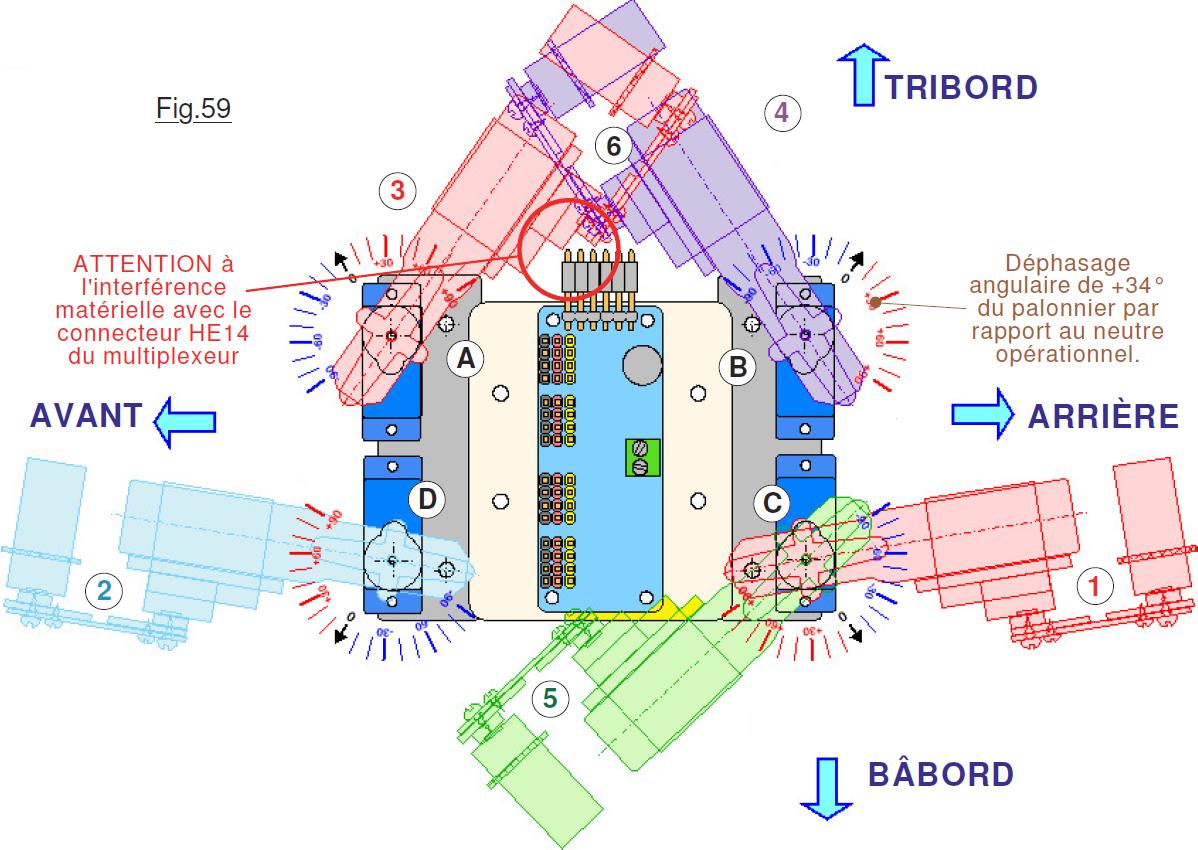
 Naturellement cette interfĂ©rence matĂ©rielle ne sera pas rĂ©elle. Il y aura collision et forçage des moteurs avant cette posture. Bien que possible mĂ©caniquement et Ă©lectroniquement, il n’y aura aucune raison de piloter ces deux orientations simultanĂ©ment. Tout au long de ce didacticiel, il faudra faire rĂ©fĂ©rences aux diverses Jambes de la sonde. Pour identifier les divers membres, l’ensemble Ă©tant vu de dessus, les Jambes seront nommĂ©es dans l’ordre horaire A, B, C, D en commençant par celle situĂ©e Ă l’avant droite. Sur la Fig.59 l’Ă©pure prĂ©sente la sonde vue de dessus avec les Jambes positionnĂ©es Ă diffĂ©rents angles caractĂ©ristiques. Par exemple en 2 le membre est positionnĂ© au maximum vers l’avant, attitude qui permet d’aller tâter le sol le plus loin possible. On retrouve l’orientation symĂ©trique en 1 vers l’arrière. L’amplitude de rotation potentielle pour les pattes arrières est d’un angle notable. Elle est visualisĂ©e entre la position 1 et la reprĂ©sentation verte en 5. La contrainte la plus limitative se trouve en 3 car il y a le connecteur HE14 du multiplexeur qui dĂ©passe sur tribord. L’amplitude potentielle des rotations des Jambes A et D sera donc plus faible que celle des membres B et C. Sur l’Ă©pure il est manifeste que la zone coloriĂ©e en jaune met en Ă©vidence une interfĂ©rence entre 5 et le multiplexeur. Ben non, c’est une illusion d’optique car les pièces mĂ©caniques vertes sont situĂ©es plus haut. Ici on illustre la difficultĂ© d’interprĂ©ter un dessin 2D qu’il faut visualiser en 3D. Pour les quatre membres on a imposĂ© un dĂ©phasage de deux dentelures soit 34°. On augmente ainsi la possibilitĂ© d’orienter vers l’avant et vers l’arrière sans restreindre vers le centre pour lequel les volumes balayĂ©s rencontrent les risques d’interfĂ©rences matĂ©rielle.
Naturellement cette interfĂ©rence matĂ©rielle ne sera pas rĂ©elle. Il y aura collision et forçage des moteurs avant cette posture. Bien que possible mĂ©caniquement et Ă©lectroniquement, il n’y aura aucune raison de piloter ces deux orientations simultanĂ©ment. Tout au long de ce didacticiel, il faudra faire rĂ©fĂ©rences aux diverses Jambes de la sonde. Pour identifier les divers membres, l’ensemble Ă©tant vu de dessus, les Jambes seront nommĂ©es dans l’ordre horaire A, B, C, D en commençant par celle situĂ©e Ă l’avant droite. Sur la Fig.59 l’Ă©pure prĂ©sente la sonde vue de dessus avec les Jambes positionnĂ©es Ă diffĂ©rents angles caractĂ©ristiques. Par exemple en 2 le membre est positionnĂ© au maximum vers l’avant, attitude qui permet d’aller tâter le sol le plus loin possible. On retrouve l’orientation symĂ©trique en 1 vers l’arrière. L’amplitude de rotation potentielle pour les pattes arrières est d’un angle notable. Elle est visualisĂ©e entre la position 1 et la reprĂ©sentation verte en 5. La contrainte la plus limitative se trouve en 3 car il y a le connecteur HE14 du multiplexeur qui dĂ©passe sur tribord. L’amplitude potentielle des rotations des Jambes A et D sera donc plus faible que celle des membres B et C. Sur l’Ă©pure il est manifeste que la zone coloriĂ©e en jaune met en Ă©vidence une interfĂ©rence entre 5 et le multiplexeur. Ben non, c’est une illusion d’optique car les pièces mĂ©caniques vertes sont situĂ©es plus haut. Ici on illustre la difficultĂ© d’interprĂ©ter un dessin 2D qu’il faut visualiser en 3D. Pour les quatre membres on a imposĂ© un dĂ©phasage de deux dentelures soit 34°. On augmente ainsi la possibilitĂ© d’orienter vers l’avant et vers l’arrière sans restreindre vers le centre pour lequel les volumes balayĂ©s rencontrent les risques d’interfĂ©rences matĂ©rielle.
DĂ©phasage sur les moteurs du genou.
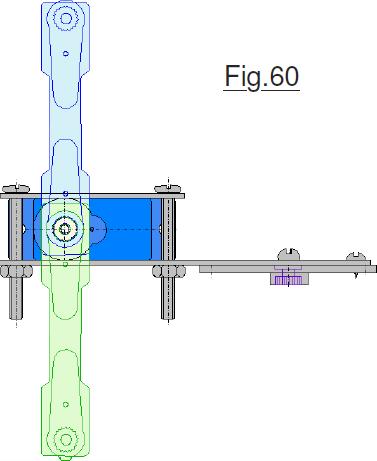
Consultez la Fig.49 qui prĂ©juge de diffĂ©rentes postures qui sont suffisamment rĂ©flĂ©chies pour les considĂ©rer comme probables en version dĂ©finitive. Il est manifeste sur ce dessin que les deux dĂ©viations extrĂŞmes sont symĂ©triques par rapport au plan moyen du moteur concernĂ©. Donc pour les articulations des Genoux nous opterons pour un dĂ©phasage nul. On enchâssera le palonnier pour qu’il soit horizontal quand le moteur sera au neutre opĂ©rationnel c’est Ă dire que +90° correspondra Ă la position bleue sur la Fig.60 alors que -90 sera relative Ă l’orientation verticale verte.
Calage du débattement angulaire des Griffes.
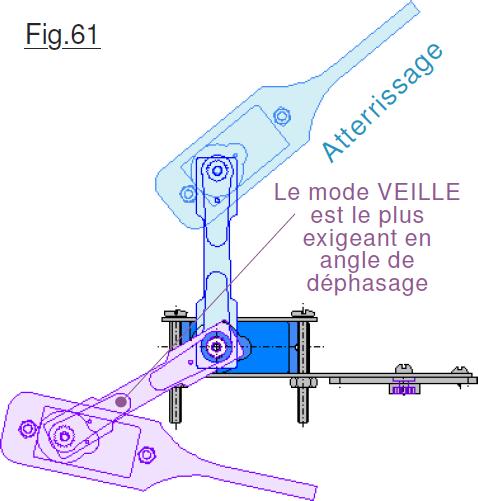 Dernière variable Ă prendre en compte pour optimiser la mobilitĂ© de JEKERT, le Pied comme pour le Genou balaye l’intĂ©gralitĂ© des 180° de la plage possible sur les moteurs. Il importe de dĂ©terminer le dĂ©phasage par rapport au neutre opĂ©rationnel pour offrir la plus grande souplesse possible Ă l’anatomie de cette petite machine. Les deux cas extrĂŞmes sont ceux du mode VEILLE et de la configuration Atterrissage. C’est la posture adoptĂ©e pour rĂ©tracter les Tibias sous « l’animal robotisé » qui est la plus exigeante. La position tracĂ©e en bleu clair sur la Fig.49 correspondant Ă l’autre limite de la rotation. La Fig.61 reprend l’Ă©pure avec uniquement les deux postures dont il est question dans ce chapitre. Deux dĂ©phasages de respectivement sept dentelures ou huit dentelures ont Ă©tĂ© envisagĂ©s. Les Ă©pures ont montrĂ© que l’on pouvait passer Ă un dĂ©calage de huit positions ce qui conduit aux allures des dessins reprĂ©sentĂ©s Ă l’Ă©chelle. Pour huit pas de dĂ©phasage par rapport au neutre opĂ©rationnel l’angle de dĂ©viation
Dernière variable Ă prendre en compte pour optimiser la mobilitĂ© de JEKERT, le Pied comme pour le Genou balaye l’intĂ©gralitĂ© des 180° de la plage possible sur les moteurs. Il importe de dĂ©terminer le dĂ©phasage par rapport au neutre opĂ©rationnel pour offrir la plus grande souplesse possible Ă l’anatomie de cette petite machine. Les deux cas extrĂŞmes sont ceux du mode VEILLE et de la configuration Atterrissage. C’est la posture adoptĂ©e pour rĂ©tracter les Tibias sous « l’animal robotisé » qui est la plus exigeante. La position tracĂ©e en bleu clair sur la Fig.49 correspondant Ă l’autre limite de la rotation. La Fig.61 reprend l’Ă©pure avec uniquement les deux postures dont il est question dans ce chapitre. Deux dĂ©phasages de respectivement sept dentelures ou huit dentelures ont Ă©tĂ© envisagĂ©s. Les Ă©pures ont montrĂ© que l’on pouvait passer Ă un dĂ©calage de huit positions ce qui conduit aux allures des dessins reprĂ©sentĂ©s Ă l’Ă©chelle. Pour huit pas de dĂ©phasage par rapport au neutre opĂ©rationnel l’angle de dĂ©viation 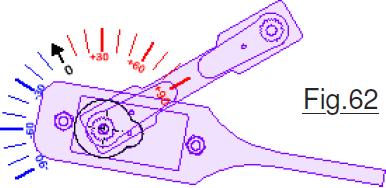 avoisine »137°. Pour nous aider Ă Ă©tablir une relation entre les consignes qui seront envoyĂ©es par programme et les positions rĂ©ellement adoptĂ©es, des secteurs graduĂ©s adaptĂ©s Ă ce dĂ©phasage sont disponibles sur la page Ă imprimer. La Fig.62 en prĂ©sente un exemplaire, et il faut, comme pour les moteurs des Hanches du reste, des reprĂ©sentations symĂ©triques pour satisfaire tous les besoins.
avoisine »137°. Pour nous aider à établir une relation entre les consignes qui seront envoyées par programme et les positions réellement adoptées, des secteurs gradués adaptés à ce déphasage sont disponibles sur la page à imprimer. La Fig.62 en présente un exemplaire, et il faut, comme pour les moteurs des Hanches du reste, des représentations symétriques pour satisfaire tous les besoins.
RĂ©partition des moteurs sur le multiplexeur.
Assembler entièrement la structure principale de la sonde impose de savoir comment seront rĂ©partis les divers moteurs sur le squelette de l’animal artificiel, objet du chapitre suivant. Se posera Ă©galement le problème des branchements sur le multiplexeur. Il s’agit d’un arbitraire, 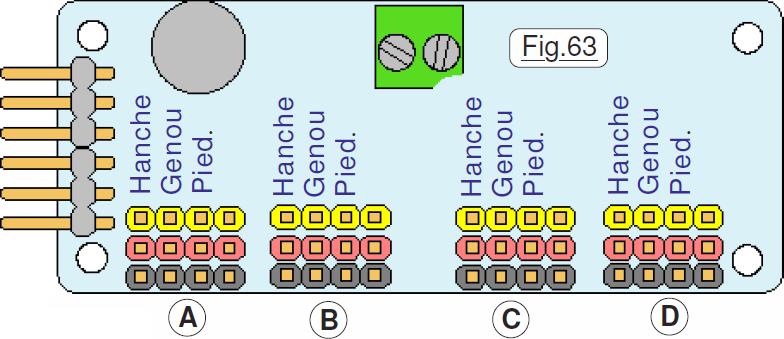 puisqu’informatiquement il sera aisĂ© d’identifier Ă notre convenance chaque individu. Autant choisir une rĂ©partition qui simplifie Ă la fois les manipulations ainsi que la mĂ©morisation. Coller en ligne toutes les fiches en partant de la sortie zĂ©ro vers la N°11 n’est pas du tout commode pour manipuler les branchements et surtout les sĂ©parations. Aussi, on adoptera la distribution montrĂ©e sur la Fig.63 qui montre que chaque regroupement de quatre sorties sur les connecteurs HE14 est rĂ©servĂ© Ă une Jambe dont la progression respecte l’ordre horaire adoptĂ© sur le châssis. Ensuite, pour chaque patte, on va brancher les moteurs dans l’ordre oĂą on les rencontre en partant du haut vers le bas. Ainsi, il sera très facile d’Ă©tablir le lien entre une sortie et le moteur qu’elle pilote. Naturellement, les sorties non utilisĂ©es restent disponibles si besoin s’en fait sentir.
puisqu’informatiquement il sera aisĂ© d’identifier Ă notre convenance chaque individu. Autant choisir une rĂ©partition qui simplifie Ă la fois les manipulations ainsi que la mĂ©morisation. Coller en ligne toutes les fiches en partant de la sortie zĂ©ro vers la N°11 n’est pas du tout commode pour manipuler les branchements et surtout les sĂ©parations. Aussi, on adoptera la distribution montrĂ©e sur la Fig.63 qui montre que chaque regroupement de quatre sorties sur les connecteurs HE14 est rĂ©servĂ© Ă une Jambe dont la progression respecte l’ordre horaire adoptĂ© sur le châssis. Ensuite, pour chaque patte, on va brancher les moteurs dans l’ordre oĂą on les rencontre en partant du haut vers le bas. Ainsi, il sera très facile d’Ă©tablir le lien entre une sortie et le moteur qu’elle pilote. Naturellement, les sorties non utilisĂ©es restent disponibles si besoin s’en fait sentir.
RĂ©partition des moteurs sur les diverses articulations.
Disposer judicieusement les moteurs sur les membres du quadrupède est impĂ©ratif pour tirer le meilleur parti de l’existant. Cette dernière phase avant de pouvoir assembler la sonde est cruciale, car nous avons vu que les moteurs disponibles dans le lot approvisionnĂ© n’ont pas des performances identiques. Pour ma part, disposant d’un Ă©chantillonnage plus que nĂ©cessaire, il est normal que les plus performants soient intĂ©grĂ©s dans la sonde. Si ça se trouve, vous ne disposez que de douze individus, pas un de plus. Si de surcroĂ®t deux oĂą trois ne peuvent pas balayer les 180° comme c’est le cas pour les rĂ©fĂ©rences n°6, n°11 et n°12 du tableau de la Fig.26, il convient alors de les affecter aux Hanches puisque ces articulations balayent un angle très infĂ©rieur Ă 180°. Ainsi JEKERT conservera toute sa mobilitĂ©, comme si tous les moteurs Ă©taient « parfaits ».
La suite est ici.