Disposant de l’ensemble mécanique du petit bras manipulateur, le moment est venu d’envisager la concrétisation du pilotage. Anticipant sur la suite de ce didacticiel, pour situer les divers modules électriques et électroniques, considérons la Fig.31 sur laquelle la machine compacte est représenté en vue plongeante. Tout n’est pas en place, loin s’en faut. En particulier le circuit de protection thermique du servomoteur de pince n’est pas encore envisagé à ce stade du développement.
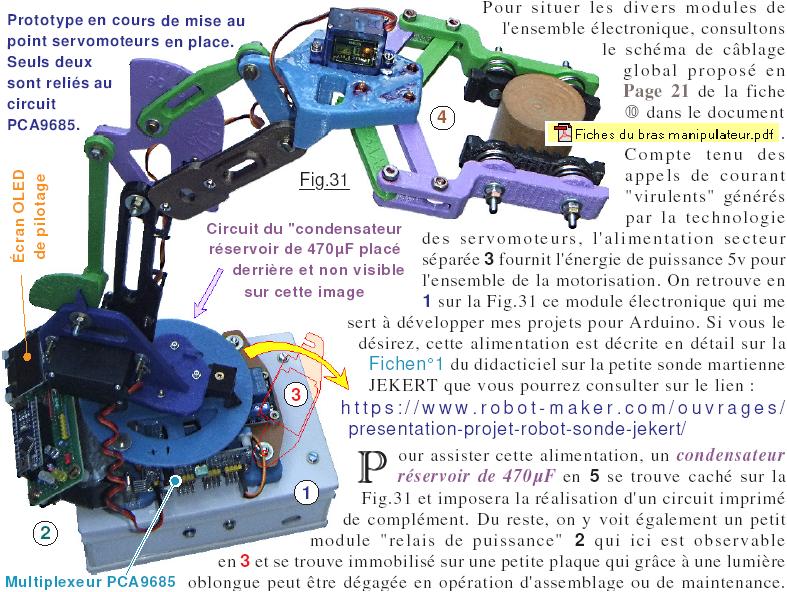
Le circuit imprimé principal en 2 supporte la carte Arduino NANO ainsi que le petit écran OLED. Non présente à ce stade du développement, sera mise à contribution une électronique de surveillance thermique du servomoteur de pince sous forme d’un petit module commercial 12 associé à un dernier circuit imprimé 9 qu’il faudra étudier et réaliser. En 4 on retrouve la pince avec la charge soulevée.
Considérons la fiche Affectation des broches d’interfaçage proposé en Page 14 de la feuille (7) dans le document Fiches du bras manipulateur.pdf. On constate que six broches d’interfaçage du microcontrôleur ne sont pas utilisées. C’est assez rare dans mes réalisations, où généralement 100% des ressources de l’ATmega328 sont employées. Ce « gaspillage » tient au fait que pour cette réalisation, la simplicité technique et l’économie de matériel ont été privilégiées. Du coup, le pilotage du bras manipulateur ne se fait pas à l’aide d’un pupitre dédié. On profite de l’opportunité offerte par l’IDE d’établir un dialogue série sur l’une des lignes USB du P.C. avec la carte Arduino. On bénéficie ainsi de l’écran de l’ordinateur et de son clavier. Pour un projet purement expérimental, cette approche me semble la plus appropriée, car réaliser un pupitre de commande comme celui de la petite sonde martienne JEKERT demanderait autant d’investissement matériel / logiciel que pour le bras manipulateur complet. La Page 15 de la feuille (7) décrit en détail le Schéma électronique de l’interfaçage Arduino / Bras manipulateur et surtout présente le dessin du Dessin du circuit imprimé principal. Ce circuit imprimé est prévu pour une isolation intégrale du reste de l’électronique. Il sera donc relié à son environnement par des connecteurs HE14. Le microcontacteur situé en extrémité de la plaque imprimée constitue le Bouton d’ARRET d’URGENCE. Passons à la réalisation de ce module autonome avec son afficheur OLED.
La suite est ici.


