Grande différence entre théorie et pratique, sur le papier c’est toujours d’une simplicité poétique. C’est beau comme un discours politique, rigoureux comme la table de multiplication et d’une évidence qui ne souffre pas la polémique. On assemble, on respecte militairement les protocole, les procédures, le contenu des notices et hop … yapluka tester. Dans notre cas, c’est la fermeture de la PINCE qui constitue la pierre d’achoppement. Explications :
Que ce soit la pince avec les mors sur ressorts, ou celle simplifiée, dans les deux cas, soulever la charge impose d’exercer un effort de pression. La seule façon mécanique d’y parvenir consiste à imposer au servomoteur un angle de serrage qui conduirait en théorie à un écartement des mâchoires un peu inférieur à celui de l’épaisseur de la pièce à saisir. Ne pouvant atteindre sa position, l’asservissement va envoyer du courant dans le minuscule moteur électrique jusqu’à atteindre l’orientation de consigne. Mais la mécanique est en butée positive, la cinématique est bloquée. Le mécanisme va forcer au maximum, car un moteur électrique bloqué, quel que soit sa taille, se comporte comme un court-circuit. Toute l’énergie part en chaleur et la température va augmenter inexorablement. En théorie, il suffit de couper l’alimentation de puissance du servomoteur lorsque la PINCE est serrée, le réducteur de vitesse à engrenages étant irréversible, l’ensemble maintiendra le serrage, et le petit bloc bleu va redescendre en température. Ça c’est la théorie ! Mais dans la pratique, lorsque l’on coupe l’alimentation de puissance, l’asservissement à un petit hoquet. Très court, mais suffisant pour relâcher un tantinet la prise … et la charge retombe au sol. Dommage !
Conclusion : Tant que la machine doit serrer la charge il faudra impérativement maintenir l’énergie sur le servomoteur de PINCE, et minimiser la durée des périodes de serrage au maximum. Si vous préférez, dès que la pince est fermée sur un objet à soulever, engager immédiatement les mouvements destinés à la redéposer à sa position d’arrivée. Dès que l’on provoque l’ouverture des mors, immédiatement couper l’alimentation en puissance du servomoteur de PINCE pour lui ménager des périodes de refroidissement. C’est exactement ce que l’on fait par exemple, avec les moteurs asynchrones qui subissent de fréquents démarrages.
Reste qu’à l’usage, vous allez vous rendre compte rapidement que l’on oublie inexorablement la PINCE, obnubilé par le pilotage des mouvements, les commandes pour enregistrer les postures, les séquences programmées. Le temps passe, et le moteur souffre en silence. Quand on sent l’odeur caractéristique d’une électronique qui surchauffe, c’est trop tard. Le petit mécanisme est bon pour la décharge, l’intérieur du corps devenu très chaud est entièrement « fondu ».
D’un point de vue pragmatique, il n’est pas question de mobiliser l’attention de l’opérateur à la surveillance d’un thermomètre. L’électronique et l’informatique sont là pour assurer cette mission, à l’instar du thermostat qui régule la température dans le réfrigérateur. Qui dit surveillance automatisée implique un certain nombre de fonctions à assurer. La première consiste à mesurer le phénomène surveillé, soit dans notre cas une température. Puis, mesure effectuée, comparer le paramètre à une valeur de décision définie par le concepteur. Enfin, en fonction du résultat de la comparaison, agir sur l’environnement en fonction des programmes associés.
Mesurer la température.
Innombrables sont les solutions techniques qui visent à mesurer, ou à réguler une température. Pour mesurer cette dernière, l’une des plus utilisée consiste à employer une thermistance CTN associée à un circuit électrique élémentaire architecturé comme un pont diviseur de tension. On obtient un équivalent analogique de la température captée, sous forme d’une tension représentative.
– Dis Totoche, c’est quoi une cétéenne ?
– Une CTN Dudule, ce sont des initiales.
– Ça veut dire C’est Techniquement Nébuleux ?
– Mais non Dudule, pour avoir tous les détails pratiques, prends immédiatement la fiche de la feuille (9) intitulée Mesure de la température du servomoteur.
– Haaa oui, ya aussi la fiche Détermination logicielle de la température et j’y pompe rien !
Autant pour la fiche Mesure de la température du servomoteur il ne faut pas faire l’impasse, autant pour l’aspect calcul et logiciel on peut repousser à plus tard, avec l’espoir confus qu’il sera possible d’oublier définitivement cette fiche maudite. Rassurez-vous, seules et seuls seront concernés les fanas de la programmation. Le tout petit module présenté sur la Fig.1 n’est utilisé ici que parce qu’il traînait dans les « bricoles » pour Arduino. Il est vraiment facile à se procurer sur Internet. Comme nous n’utilisons que la résistance CTN, n’importe quel modèle du commerce présentant des caractéristiques voisines conviendra parfaitement. Du reste, toutes les références en ligne ont des caractéristiques équivalentes … c’est du cousinage ! Voisines, mais pas identiques, y compris si vous approvisionnez un clone du module impliqué sur le prototype. Il faudra par conséquent OBLIGATOIREMENT ajuster quelques paramètres dans le logiciel d’exploitation. C’est incontournable, facile, et décrit dans le prochain chapitre, c’est promis.
Capter la température.
Passons à l’aspect concret. Que ce soit le composant du petit module de la Fig.1 sur la fiche nommée Mesure de la température du servomoteur, ou d’une quelconque résistance CTN, dans tous les cas le corps d’épreuve prend globalement l’aspect d’une goutte d’eau assortie de deux longs fils rigides pour la relier électriquement aux circuits de gestion. L’idéal consisterait à la placer directement dans le stator métallique du moteur électrique. On perce de servomoteur à l’endroit idoine, on introduit la CTN, on l’immobilise avec une résine thermoconductrice et le tour est joué. Idéal sauf que le servomoteur est foutu, avant d’avoir vu sa température augmenter d’un seul degré Celsius ! Bon, on oublie l’idéal et l’on cogite un compromis techniquement raisonnable. Nous allons tâter la température sur le corps du servomoteur en favorisant au maximum la conductibilité thermique entre ce dernier et la CTN. Sur la Fig.40 les fils de sortie 8 du servomoteur sont laissés provisoirement « dans le vide ». Le petit module du commerce en 2 dont on n’utilise que la résistance CTN est immobilisé sur l’équerre support 3 en intercalant deux entretoises isolantes. Un petit boulon ØM2 solidarise à son tour l’équerre 3 sur le corps de pince 4. En 1 le module n’est pas encore relié à l’automatisme par son connecteur HE14 dont on n’utilisera que deux broches. La thermistance CTN est plaquée par un léger pincement contre le corps du servomoteur par la bride 6. Bride et thermistance sont copieusement barbouillées de graisse dite « au silicone » (Spécial électronique.) qui améliore considérablement la conductibilité calorifique. Comme la bride 6 très élastique ne demande qu’à s’échapper vers le haut, elle est collée sur le corps du servomoteur par du vernis à ongles 7 qui une fois solidifié pérennise de façon simple cette liaison mécanique. Maintenant que le capteur est solidaire de l’ensemble PINCE, il reste à le relier électriquement à un 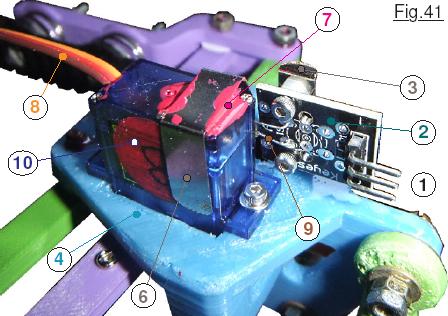 module de mesurage et d’asservissement, thème traité dans le paragraphe qui suit. Coté face, même combat. On retrouve sur la Fig.41 les éléments principaux du dispositif de surveillance thermique. En particulier on distingue nettement entre l’équerre 3 et le circuit 2 les entretoises isolantes constituées d’écrous ØM2 en nylon. Moins évident, en 9 on devine les deux fils rigides qui viennent de la thermistance CTN pincée entre le corps du moteur 10 et le clips métallique 6.
module de mesurage et d’asservissement, thème traité dans le paragraphe qui suit. Coté face, même combat. On retrouve sur la Fig.41 les éléments principaux du dispositif de surveillance thermique. En particulier on distingue nettement entre l’équerre 3 et le circuit 2 les entretoises isolantes constituées d’écrous ØM2 en nylon. Moins évident, en 9 on devine les deux fils rigides qui viennent de la thermistance CTN pincée entre le corps du moteur 10 et le clips métallique 6.
Comparer puis agir.
Agir … certainement, mais pas n’importe comment. Si une surchauffe met en danger le moteur, il faudra inévitablement couper la puissance sur ce dernier. Toutefois, nous savons que cette coupure de l’énergie engendrera inexorablement la libération de la charge qui tombera à la verticale jusqu’à trouver un obstacle à son évasion. Aussi, on se doute qu’avant de déclencher cette parade automatiquement, il importe d’avertir l’opérateur pour lui laisser le temps matériel de déposer proprement la charge en prenant manuellement les commandes. Le logiciel prend en compte deux seuils critiques. Le premier se situe à 36°C, température à partir de laquelle un avertissement prévient l’opérateur qu’il doit immédiatement déposer la charge saisie par le bras manipulateur. Le deuxième seuil est ajusté à 38°C valeur qui déclenchera la disjonction d’alimentation de la PINCE. Cette action est automatique et ne peut être contrée par l’opérateur, évitant ainsi le risque d’endommager le SG90. Ce n’est pas un drame, si le petit cylindre en bois tombe sur le bureau, roule et poursuit sa chute au sol sous l’armoire. En revanche, avoir à changer la motorisation, ce qui est arrivé sur le prototype, est autrement plus agassif, et a déclenché la prise de décision d’ajouter le dispositif de protection.
Enfin, outre l’automatisation de la coupure d’énergie, informer reste un pléonasme en automatisation. Aussi, sur plusieurs pages écran du petit afficheur, la température mesurée sera indiquée en numérique, et également en graphique sous la forme d’un thermomètre symbolique.
En particulier en feuille (3) la fiche Les différentes PAGES sur l’écran OLED. 2/3 présente la PAGE8() qui fournit ces informations. Également présente la symbolique graphique est reprise sur la PAGE5() : Les différentes PAGES sur l’écran OLED. 3/3. Reste que surveiller la santé du petit servomoteur est une priorité forte. La température sera donc prise en compte en permanence, y compris durant les phases d’attente d’une commande au clavier, ou durant le déroulement d’une séquence automatique. Si cette dernière est un peu longue, il peut donc arriver qu’une disjonction thermique se déclenche « inopinément ». Aussi, avant de valider un APPRENTISSAGE par exemple, vérifier que la température actuelle n’est pas trop proche des seuils de décision. Pour information, les valeurs des comparaisons de 36°C et 38°C ont été déterminées expérimentalement, rien n’interdit d’en adopter des différentes, au prix de modifications des pages écran et représentations graphiques.
Le disjoncteur thermique.
Situé en aval du disjoncteur de puissance, il est composé un petit relais ILS piloté directement par la broche analogique A3 fonctionnant en sortie binaire. En feuille (5) le recto de la fiche Gestion de la surchauffe du « servomoteur pince » propose les protocoles d’intervention en cas d’avertissement thermique ou de disjonction, et surtout, le verso décrit en Fig.1 le schéma électronique retenu et en Fig.2 le dessin du petit circuit imprimé associé. Toutes les explications sont détaillées sur cette fiche. Nous savons que l’opportunité d’un peu de place disponible a été saisie pour ajouter l’interruption le l’alimentation en puissance du moteur de HANCHE en 9 de la fiche déjà mentionnée Alimentation électrique des divers modules, et inséré une LED rouge qui s’illumine quand la disjonction thermique est active On peut s’étonner de la valeur forte de 10kΩ pour limiter le courant dans ce composant optronique. Comme ce témoin lumineux présente un très bon rendement, et qu’il est de nature « MASER » plus que diode électroluminescente, la luminosité est plus que suffisante. Toute diode de redressement peut remplacer les 1N4002 sélectionnées car disponibles.
Changeant de technologie, le circuit du disjoncteur thermique utilise des circuits imprimés à « pastilles circulaires » que l’on trouve à loisir en « fouinant » le commerce en ligne. L’avantage, c’est qu’il n’y a plus à couper des pistes linéaires. Ces produits sont « double face ». On se contente de souder les composants, en se servant souvent des queues de ces derniers comme piste conductrices. Le montage photographique de l’Image38.JPG suffit à comprendre les techniques de réalisation. Les pistes réalisées avec du fil de cuivre rigide pour câblage sont soudées aux extrémités et éventuellement sur quelques pastilles intermédiaire si nécessaire. La grosseur du fil utilisé est directement fonction de l’intensité véhiculée. Si le courant est notable, employer un fil plus gros que celui sélectionné pour du signal informatique ou pour alimenter une LED.
La suite est ici.


