Avant de foncer tête dans le guidon pour réaliser notre bras robot, il me semble utile de vous prévenir que toutes les images qui sont présentes dans ce didacticiel sont de très médiocres qualités. En effet, elles sont issues de copies d’écran, technique qui engendre une perte de qualité considérable. Comme pour tous mes autres tutoriels, vous trouverez l’intégralité des « modules » dont vous pouvez avoir besoin sont réunis dans un fichier.ZIP que vous trouverez ici.
Ainsi, il vous sera possible de bénéficier de l’original. Par ailleurs, bien que pouvoir consulter en ligne est un plus incontestable, les possesseurs de liseuses électroniques seront également heureux de pouvoir disposer de ce document sur leur appareil électronique. On peut maintenant passer au vif du sujet :
Réaliser entièrement un bras manipulateur expérimental.
Révolution qui passe complètement inaperçue du public, les imprimantes 3D changent radicalement le monde du bricolage, et en particulier celui des loisirs. Bien que cette technologie n’en soit encore qu’à ces balbutiements, tout au moins pour les machines non professionnelle, l’éventail des possibilités qu’elles offrent est vertigineux. Pouvoir « si facilement » créer n’importe quelle petite pièce mécanique sans posséder une seule machine d’usinage est enthousiasmant au possible. Vous imaginez dans le monde de la petite robotique ludique le parti que l’on peut tirer de telles machines. Heureux sont les possesseurs privilégiés d’une telle imprimante 3D ouvrant à 360° le champ des applications envisageables.
Ayant osé franchir le pas, j’ai donc craqué pour une Micro Delta Rework acquise en KIT à assembler sois-même. Outre une différence de prix significative par rapport à ce produit entièrement monté, fédérer tous ces éléments pour aboutir à une machine complète est particulièrement agréable et pas vraiment compliqué. Bien que le volume des pièces possible reste relativement discret, c’est l’une des machines dont le rapport Qualité/Prix est le meilleur sur le marché. Reste à la mettre en œuvre, et sans que ce soit démentiel, l’entreprise n’est pas anodine non plus. Naturellement, il serait possible de se contenter d’imprimer des objets dont les modèles sont directement disponibles sur la toile. Forcément on est tenté de commencer par là, ne serait-ce que pour arriver à se convaincre que notre machine fonctionne très bien. Ceci dit, le vrai bénéfice de cette technologie réside dans l’aptitude à créer ses propres modèle … c’est autrement plus délicat !
 Appréhender une nouvelle technologie n’est jamais immédiat. Cette dernière vient bousculer nos habitudes, torturer notre confort intellectuel, et ce d’autant plus énergiquement que notre ancienneté ici bas engendre une inexorable paresse mentale à laquelle on abandonnerait facilement notre ordinaire. (Hé oui les amis, je totalise actuellement plus de 71 printemps, à cet âge le cerveau commence à accuser une certaine tendance à l’hystérésis !)
Appréhender une nouvelle technologie n’est jamais immédiat. Cette dernière vient bousculer nos habitudes, torturer notre confort intellectuel, et ce d’autant plus énergiquement que notre ancienneté ici bas engendre une inexorable paresse mentale à laquelle on abandonnerait facilement notre ordinaire. (Hé oui les amis, je totalise actuellement plus de 71 printemps, à cet âge le cerveau commence à accuser une certaine tendance à l’hystérésis !)
La première approche qui semble la meilleure consiste à se gaver d’informations glanées sur Internet. Puis passer à l’action en testant avec des pièces simples et voir ce que ça donne sur la machine. Cette méthode n’est pas vraiment efficace, car elle masque une réalité complexe à laquelle on sera forcément confronté dès que l’on va vouloir créer des ensembles « utiles ». Aussi, la meilleure façon d’appréhender une technologie, c’est de foncer tête baissée dès que l’on a saisi les grandes lignes de cette dernière, dans un vrai projet. C’est une voie incontestablement difficile. Je suis toutefois convaincu que c’est la plus formatrice de toutes, car elle oblige à des efforts considérables, qui sont d’autant plus consentis avec docilité, que l’idée d’aboutir à une réalisation séduisante motive intensément et évite de ce fait un abandon prématuré dès que l’on commence à se heurter « au réel ». Aussi, il me restait à m’engager dans un vrai projet, avec de la mécanique, (Plein plein plein puisque le but réside dans la réalisation des pièces mécaniques qui le composent.) de l’électronique et de l’informatique à base d’Arduino. Les ingrédients étant listés, il restait à trouver une application robotique pour réunir cette « trilogie » dans une recette bricoludique appropriée.
Pourquoi un bras manipulateur de plus, alors que des ensembles disponible pour l’impression 3D sont presque légion sur Internet ? Plusieurs raisons ont motivé ce choix. Désirant « depuis toujours » posséder un petit bras manipulateur, l’idée d’en concevoir un personnel dont les pièces seraient imprimées s’est imposée de façon presque naturelle. Il m’aurait été relativement facile de concevoir un appareil à base de pièces en métal, travaillant ce matériau sans difficulté particulière. Passer à une technologie « moulée » impose des contraintes particulières liées aux imprimantes 3D. Aussi, concevoir entièrement une telle petite machinerie remplit à merveille l’objectif de la découverte des spécificités que présentent les technologies basées sur la dépose d’un fil rendu malléable par échauffement. Contrairement aux éléments que je concevais en vue d’un usinage par enlèvement de matière, il faut maintenant raisonner à l’inverse. Enfin, un bras manipulateur est par philosophie une machine robotisée, qui exige de l’électronique pour piloter les moteurs et de l’informatique pour générer les mouvements. C’est dit, nous avons les ingrédients, il ne reste plus qu’à cuisiner …
Fondamentalement, le but de ce didacticiel réside dans le partage. Partage des difficultés rencontrées, mise en commun de l’expérience acquise. Exactement comme je l’avais proposé pour la réalisation de la Sonde Martienne JEKERT dont le didacticiel est disponible sur ce site, ce didacticiel n’est pas linéaire, et encore moins construit lorsque tout est terminé et que les solutions ont fait leurs preuves. Au contraire, les chapitres sont renseignés au fur et à mesure du développement, avec pour conséquences la rencontre d’écueils qui imposent des changements de stratégie et remettent en cause les solutions déjà « débroussaillées ». C’est donc une approche expérimentale que j’engage dans ces pages, conduite au fur et à mesure que je tente des manipulations, et essais après essais cherche à aboutir à un ensemble cohérent. Il y aura forcément des remises en cause. C’est parti pour l’aventure et les embrouilles …
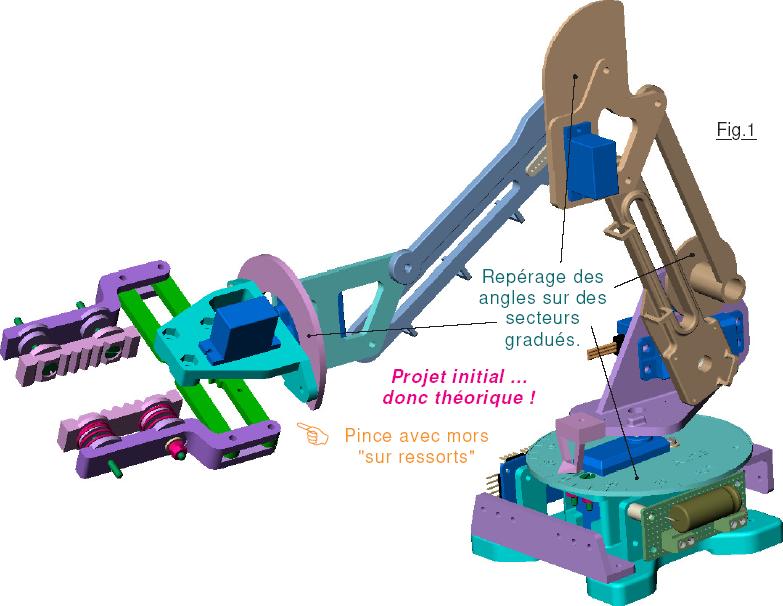
Comme pour tous mes didacticiels, je vous fournis l’intégralité des éléments dont vous pouvez avoir besoin si la tentation est grande et que vous décidez de franchir le pas. Bien entendu ce « KIT » contient le didacticiel, toutes les explications indispensables, les photographies et les dessins utiles et surtout les fichiers informatiques pour la carte Arduino et on s’en doute … les fichiers indispensables pour créer les pièces sur une imprimante 3D. Rassurez-vous, quelle que soit l’imprimante dont vous avez l’usage, les fichiers de type STL seront compatibles, il y a belle lurette que des formats se sont standardisés. Pour que vous puissiez avec certitude aboutir, je propose deux variantes pour la pince. Sur la Fig.1 la machine n’existe encore que dans la mémoire électronique d’un logiciel de dessin 3D. La pince dispose de ressorts pour des raisons exposées plus avant. Il se trouve que je pratique la récupération à outrance et le recyclage permanent. Les quatre ressorts sont particuliers, puisque issus d’un appareil quelconque qui allait à la casse. D’un diamètre particulier, d’une raideur spécifique, rien ne prouve qu’il vous soit possible d’en trouver dans le commerce. Aussi, le projet est complété d’une variante montrée sur la Fig.2 dont la pince présente des doigts rigides. Notez au passage que pour rendre cette variant plus polyvalente, si vous enlevez des deux Mors, la pince devient plus large et surtout peut saisir au centre des objets de forme cylindriques.
– Oups ! Elle a raison la petite salamandre, passons immédiatement au tutoriel !
La suite est ici.


