Inutile d’en « tartiner » des pages relatives au multiplexeur. Pour ceux qui le désirent ses caractéristiques et la façon de le mettre en œuvre sont détaillées dans les deux fiches dédiées de la feuille (8). Il sera ainsi facile d’établir un lien entre les instructions du programme d’exploitation, ainsi que les divers branchements électriques à effectuer. Quand à son intégration sur le bras manipulateur, il se monte directement sur le statif les trous prévus à cet effet étant disposés avec les entraxes correspondant sur le coté repéré par la lettre « M« .
Le circuit imprimé du condensateur réservoir ».
Peu encombré, il ne comporte fonctionnellement que le condensateur polarisé de 470µF qui assiste l’alimentation de puissance quand les servomoteurs engendrent de forts appels de courant lors des transitoires durant les phases d’accélération. Comme on disposait de la place, car la longueur du circuit imprimé correspond à celle du statif, les trois connecteurs HE14 relatifs au servomoteur de Hanche ont été ajoutés. Les deux borniers assurant les liaisons électriques débitant des ampérages notables sont disposés de façon à faciliter le passage des fils qui vont vers le relais de puissance et vers le multiplexeur. En particulier une échancrure est pratiquée à la lime pour laisser un passage suffisant entre la plaque cuivrée et la voûte du statif. Consultez la fiche Alimentation électrique des divers modules de la feuille (10) qui fournit le dessin agrandi de ce module. Pour faciliter le développement et la mise au point, une LED rouge a été ajoutée pour témoigner de la présence du +5Vcc sur le condensateur, donc avant le disjoncteur piloté par programme avec la commande ‘p‘. Sur Image36.JPG le bras manipulateur est achevé et complet. On peut y situer les éléments principaux, et en particulier les fils électriques de forte section qui véhiculent des courants importants.
Le circuit imprimé du relais de puissance.
Intercalé entre l’alimentation de laboratoire et le multiplexeur, il permet, à la demande de l’opérateur, de couper l’énergie de puissance sur les servomoteurs. Cette faculté s’avère appréciable lors de la mise au point du programme, en opérations de maintenance ou en utilisation normale du bras manipulateur. En particulier quand on enregistre un programme de postures, et que l’on se contente de simuler les mouvements sur l’écran graphique. Pour diverses raisons techniques, je ne suis pas 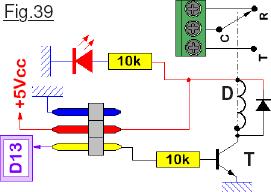 favorable à l’utilisation des relais électromagnétiques, car leurs contacts peuvent charbonner sur le long terme, ils provoquent des parasites hertziens et des surtensions qu’il faut drainer par des diodes dites « de roue libre ». Néanmoins, comme il s’agit d’un projet ludique qui ne fonctionnera pas 24H sur 24 toute l’année, par raison de simplicité j’ai utilisé un petit circuit qui traînait dans un lot de modules expérimentaux pour Arduino. La place étant disponible de l’autre coté du statif par rapport au circuit imprimé principal, le petit module est immobilisé sur une plaque isolante, (En fait un morceau de plaque cuivrée.) qui sera fixée sur les vis qui assurent la liaison du statif avec l’alimentation de puissance. Quand les écrous de serrage sont libérés, cette pièce pivote coté multiplexeur autour du trou de passage de la vis de liaison. Coté « condensateur de 470µF » une lumière représentée en noir sur Image37.JPG permet de dégager ce circuit, ce qui facilite considérablement les opérations d’assemblage et de maintenance. Pour assurer la portée correcte des écrous, des rondelles plates larges sont intercalées dessus et dessous des deux cotés. Pour celles et ceux qui n’ont pas à leur disposition le petit circuit du commerce, il est enfantin d’en créer un équivalent. La Fig.39 en donne le schéma, les valeurs des éléments ne sont pas critiques. La diode D est une 1N4002 choisie car elle est disponible dans le tiroir des composants de récupération, et pour le transistor T, prendre un 2N1711 ou tout équivalent comme le 2N2222 par exemple. Pour ma part, je me passerais royalement de la LED rouge qui n’apporte pas grand chose en terme d’information technique si ce n’est que le +5Vcc est présent. En avons-nous vraiment besoin ?
favorable à l’utilisation des relais électromagnétiques, car leurs contacts peuvent charbonner sur le long terme, ils provoquent des parasites hertziens et des surtensions qu’il faut drainer par des diodes dites « de roue libre ». Néanmoins, comme il s’agit d’un projet ludique qui ne fonctionnera pas 24H sur 24 toute l’année, par raison de simplicité j’ai utilisé un petit circuit qui traînait dans un lot de modules expérimentaux pour Arduino. La place étant disponible de l’autre coté du statif par rapport au circuit imprimé principal, le petit module est immobilisé sur une plaque isolante, (En fait un morceau de plaque cuivrée.) qui sera fixée sur les vis qui assurent la liaison du statif avec l’alimentation de puissance. Quand les écrous de serrage sont libérés, cette pièce pivote coté multiplexeur autour du trou de passage de la vis de liaison. Coté « condensateur de 470µF » une lumière représentée en noir sur Image37.JPG permet de dégager ce circuit, ce qui facilite considérablement les opérations d’assemblage et de maintenance. Pour assurer la portée correcte des écrous, des rondelles plates larges sont intercalées dessus et dessous des deux cotés. Pour celles et ceux qui n’ont pas à leur disposition le petit circuit du commerce, il est enfantin d’en créer un équivalent. La Fig.39 en donne le schéma, les valeurs des éléments ne sont pas critiques. La diode D est une 1N4002 choisie car elle est disponible dans le tiroir des composants de récupération, et pour le transistor T, prendre un 2N1711 ou tout équivalent comme le 2N2222 par exemple. Pour ma part, je me passerais royalement de la LED rouge qui n’apporte pas grand chose en terme d’information technique si ce n’est que le +5Vcc est présent. En avons-nous vraiment besoin ?
La suite est ici.


