Rechercher
Moteurs et actionneurs
- Kits robots
- Kits débutants Arduino
- Cartes programmables
- Shield
- Capteurs
- Moteurs et actionneurs
- Drivers variateurs et autre contrôleurs d'actionneurs
- Composants et accessoires robotique
- Alimentation
- Eléments mécaniques
- Domotique
- Impression 3D
- Outillage
- Produits 100% remboursés *
- Produits reconditionnés
- Chèque Cadeau
- Livres robotique
- Produits dérivés
- Coupe de France de Robotique
- Services
- Fin de série

 Agrandir l'image
Agrandir l'image 

Moteur pas à pas NEMA 17
Moteur pas à pas bipolaire puissant, d'un couple de 2.6 Kg.cm au format standard NEMA17.

En savoir plus
Description :
Un moteur pas à pas est un moteur brushless, à haute durée de vie, qui se commande comme son nom l'indique pas par pas, avec précision.
Ces moteurs ont 200 pas par tour soit 1.8° par pas.
Ce moteur pas à pas est un moteur à quatre fils : Rouge , Bleu , Vert , Noir.
Il y a 4 demi-bobines, câblées en parallèles 2 à 2 pour former au final 2 bobines: 2 fils par bobines, les fils "rouge" et "bleu" étant les extrémités d'une bobine, les fils "noir" et "vert" les extrémités de l'autre bobine. En cas de doutes les extrémités des bobines peuvent être repérées par un multimètre en mode "continuité " ou " testeur".
En effet une bobine étant un élément inductif, un multimètre indiquera qu'il y a continuité entre les deux extrémités d'une même bobine.
Ce sont les moteurs qui sont généralement utilisés pour les imprimantes 3D et autres machines à commande numérique.
Afin d'utiliser un moteur pas à pas il est nécessaire d'utiliser un "driver de moteur pas à pas". Ces drivers permettent de transmettre la puissance électrique au moteur afin de le faire tourner.
Généralement les drivers de moteurs pas à pas permettent de commander les moteurs en fractions de pas complet. En mode demi-pas, le moteur devra alors faire 400 demi-pas pour faire un tour complet soit 0.9° par demi-pas. Certains drivers permettent de faire du 16ème de pas et même du 128ème de pas ...
Comme tout moteur électrique, le moteur pas à pas se sert de champ magnétique pour transformer l'énergie électrique en énergie mécanique. Il possède au moins 2 bobinages qui sont alimentées d'une manière spécifique à ce type de moteur. On l'utilise surtout pour les systèmes de positionnement car il permet un contrôle de sa rotation très précis (s'il est bien dimensionner!). Une rotation est divisée par un nombre de pas angulaire, donc plus il y a de pas, plus il sera précis. On peut même augmenter la précision en divisant chaque pas par 2, 4, 8 et plus.
Un bref résumé sur les moteurs pas à pas pour ceux qui le souhaitent :
Il y a 3 types de moteur pas à pas :
- Les moteurs à réluctance variable. Ils ne possède que des électroaimants au stator, et le rotor est composé de plusieurs dents en fer doux. On le fait tourner en alimentant les bobines les unes après les autres (le rotor essai de s'aligner avec le champ magnétique), et on change de sens en changeant l'ordre d’excitation des bobines.
- Les moteurs à aimant permanent. Le rotor est polarisé et on le contrôle en alimentant les bobines les unes après les autres, dans un sens puis dans l'autre ; son contrôle est donc plus compliqué car il faut inverser le courant dans les bobines, à l’exception des moteur unipolaire : chaque bobine possède une connexion en leur milieu pour faire des « demi-bobine » et éviter cette inversion de courant (on reconnaît s'ils sont unipolaires quand ils ont 6 fils au lieu de 4, pour un moteur à 2 bobines par exemple).
- Les moteur hybrides. Ils sont le mélange des deux autres types : Un rotor avec des dents polarisés. Il se contrôle comme le moteur à aimant permanent et a pour avantage de pouvoir posséder un grand nombre de pas, un rendement plus élevé
Si pour un moteur à 2 bobines vous avez 8 fils, c'est que vous avez le choix entre 2 câblages qui est d'habitude déjà fait dans le moteur si vous aviez eu 4 fils. Vous pouvez choisir de câbler vos bobines en série ou en parallèle : en montage parallèle votre moteur aura plus de couple et plus de vitesse par rapport au montage série, mais il consommera d'avantage.
Une image où on peut voir ces 3 câblages :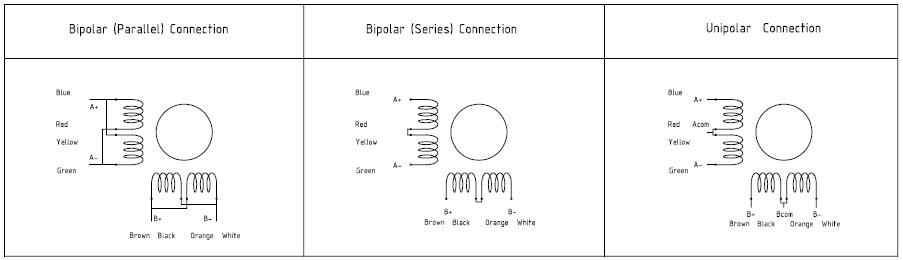
- La résistance et l’inductance des bobines, ces valeurs vont jouer sur l'évolution du couple par rapport à la montée en régime du moteur.
- Son couple maximal, toujours à bas régime.
- L'intensité maximale par phase, si vous la dépassez surveillez bien la température du moteur !
Caractéristiques techniques :
| Caractéristique | Valeur |
|---|---|
| Couple | 1,8 kg.cm à 1,6 A / 2,6 kg.cm à 2,6 A |
| Tension des bobines | 2,55 V |
| Courant par phase | 3,4 A |
| Résistance du bobinage | 0,8 Ω |
| Arbre de sortie | 4,5 mm |
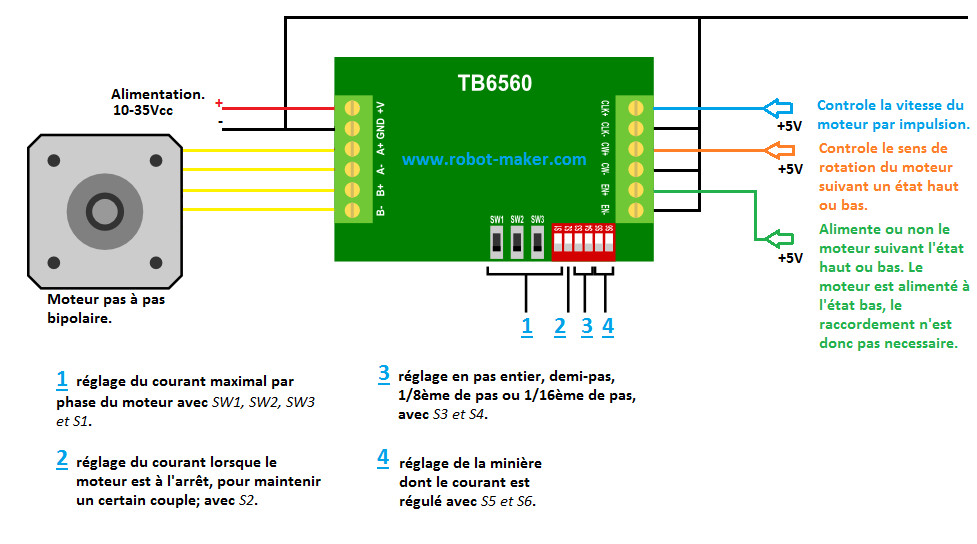
Exemple d'utilisation :
Exemple d'utilisation d'un moteur pas à pas avec un driver de moteur pas à pas TB6560
Exemple de code utilisant la librairie accel stepper :
#include <AccelStepper.h>
AccelStepper stepper(1,9,2); //9 : sortie l'arduino avec laquelle tu controles la vitesse, et 2 le sens de rotation.
void setup(){ stepper.setMaxSpeed(2000); //vitesse max du moteur en nombre de steps par seconde stepper.setSpeed(100);//Réglage de la vitesse du moteur}
void loop(){ stepper.runSpeed();// fait tourner le moteur à la vitesse réglée. }
Liens utiles :
Vous avez besoin d’aide ? Des questions ? Venez nous poser des questions via le forum associé !
Avis
Accessoires



Les clients qui ont acheté ce produit ont également acheté...
-

Courroie crantée GT2
Courroie cranté de type GT2 vendue au mètre.
-

Roulement à billes
Roulement à billes
-

Driver L298N pour moteur CC
Petite carte moteur permettant le contrôle de 2...
-

Clone Arduino Uno
Carte clone fiable de la fameuse carte "Arduino...
-

Batterie LiPo 1S
Petite batterie LiPo 1S 150mAh .
-

Nappe de 40 fils de type mâle mâle
Lot de 40 fils de type mâle-mâle à séparer.
-

Module MOSFET 400W 15A
Un module Intégrant deux MOSFET, qui permet de...
-

Détecteur d’obstacle photoélectrique E3JK-DS30M1
Capteur photoélectrique E3JK-DS30M1 type...
-

Ecran OLED miniature
Ecran OLED miniature.
-

Véroboard
Plaque de soudure perforée avec un espacement...
Notes et avis clients