Ha. Mais il faut se donner le temps. Je vois pas pourquoi tu n’y arriverais pas.

Couple moteur pas à pas
Débuté par Angéla, sept. 19 2017 09:02
35 réponses à ce sujet
#21

Path
-

- Modérateur
-

- 2â¯504 messages
Made By Humans
- Gender:Male
- Location:Paris
#22
Mike118
-

- Administrateur
-
- 10â¯308 messages
Staff Robot Maker
- Gender:Male
- Location:Anglet
- Interests:Robotique, Entrepreneuriat, Innovation, Programmation, Résolution de problème, Recherche de solutions, Mécanique, Electronique, Créer, Concevoir
Posté 09 octobre 2017 - 10:47
EDIT : En voyant le message de path j'aurais peut être pas du répondre ainsi mais bon :
Exemple de code plus simple :
#include <AccelStepper.h>
AccelStepper stepper(1,7,8); //le 7 représente la sortie de l'arduino avec laquelle tu controles (pulse) la vitesse, et le 2 le sens de rotation. (dir)
void setup()
{
stepper.setMaxSpeed(2000);//vitesse max du moteur en nombre de steps par seconde tu peux augmenter
}
void loop()
{
for (int i=0; i<6400; i++)
{
stepper.setSpeed(100);//Réglage de la vitesse du moteur tu peux augmenter ou baisser
stepper.runSpeed();// fait tourner le moteur à la vitesse réglée.
}
for (int i=0; i<6400; i++)
{
stepper.setSpeed(-1000);//Réglage de la vitesse du moteur tu peux augmenter ou baisser
stepper.runSpeed();// fait tourner le moteur à la vitesse réglée.
}
}
par contre il faut que tu installe la librairie accelStepper que tu peux télécharger en cliquant sur le lien de téléchargement de la librairie accelstepper
Et pour installer la librairie tu as ça dans l'ouvrage pour débuter avec arduino
Pour les switch, de SW1 à SW6 , sans savoir quel moteur tu as pour avoir plus de couple je dirais de mettre ON ON OFF OFF OFF OFF mais vérifie que ton moteur ne chauffe pas trop. Si tu vois qu'il commence à chauffer tu coupes =)
Si mon commentaire vous a plus laissez nous un avis ! 
Nouveau sur Robot Maker ?
Jetez un oeil aux blogs, aux tutoriels, aux ouvrages, au robotscope aux articles, à la boutique et aux différents services disponible !
En attendant qu'une bibliothèque de fichiers 3D soit mise en place n'hésitez pas à demander si vous avez besoin du fichier 3D d'un des produits de la boutique... On l'a peut être !
Si vous souhaitez un robot pilotable par internet n'hésitez pas à visiter www.vigibot.com et à lire le sous forum dédié à vigibot!
#23
Forthman
-

- Membres
-
- 1â¯486 messages
Membre chevronné
- Gender:Not Telling
- Location:Montauban (82)
Posté 10 octobre 2017 - 05:24
Pour S1-S2-S3 c'est ON-ON-OFF
Comme ça ton moteur travaillera en pas entiers (200 pas par tour)
Pour pouvoir faire des micro-pas, il faut faire varier a tension des bobines, mais elle ne peut varier que vers le bas (tension moins forte)
donc on perd du couple sur les positions intermédiaires
NEMA 17 correspond à la dimension du moteur, il faudrait la référence exacte pour savoir quelle intensité peut supporter ton moteur.
et donc déterminer les switch S4-S5-S6
edit: je n'avais pas "tourné la page" et je n'avais pas vu la réponse de Mike118 du coup ça fait un peu doublon 
#24
Angéla
-
- Membres
- 15 messages
Nouveau membre
Posté 10 octobre 2017 - 09:19
Bonjour et merci.
Je vais dès ce soir essayer d'intégrer la librairie et faire des essais.
Concernant le moteur, j'ai ceci :
Nombre de pas: 200
Angle par pas: 1,8°
Alimentation: 2,8 V
Résistance/phase: 1,4 ohms
Courant/phase: 2 A
Inductance/phase: 3 mH
Couple de maintien: 5,9 kg.cm
J'ai réglé l'intensité sur 1,5 car j'ai voulu laisser une marge pour pas abîmer le moteur. A voir sur vos conseils.
Je fabrique un petit kit maison d'engrenages pour pouvoir augmenter le couple du moteur et faire des essais un peu à taton.
D'où ma volonté de partir côté moteur avec une configuration (programme + réglage) optimale.
Encore merci pour vos réponses
#25
Mike118
-
- Administrateur
-
- 10â¯308 messages
Staff Robot Maker
- Gender:Male
- Location:Anglet
- Interests:Robotique, Entrepreneuriat, Innovation, Programmation, Résolution de problème, Recherche de solutions, Mécanique, Electronique, Créer, Concevoir
Posté 10 octobre 2017 - 04:02
Tu peux régler à 2A  Mais ça devrait déjà bien marcher à 1,5A, c'est juste que tu aura pas forcément le couple maximal.
Mais ça devrait déjà bien marcher à 1,5A, c'est juste que tu aura pas forcément le couple maximal.
Si mon commentaire vous a plus laissez nous un avis !
Nouveau sur Robot Maker ?
Jetez un oeil aux blogs, aux tutoriels, aux ouvrages, au robotscope aux articles, à la boutique et aux différents services disponible !
En attendant qu'une bibliothèque de fichiers 3D soit mise en place n'hésitez pas à demander si vous avez besoin du fichier 3D d'un des produits de la boutique... On l'a peut être !
Si vous souhaitez un robot pilotable par internet n'hésitez pas à visiter www.vigibot.com et à lire le sous forum dédié à vigibot!
#26
Angéla
-
- Membres
- 15 messages
Nouveau membre
Posté 10 octobre 2017 - 09:12
Bonsoir,
Donc, j'ai installé la librairie, j'ai branché le pul + sur le 7 de l'arduino, puis le dir + sur le 8 (car tu as noté 2 mais je pense que c'est une erreur ?)
Si j'a bien lu le forum, le 1 indique qu'il y a un driver ?
Le téléversement a bien fonctionné.
Mais rien ne fonctionne car je ne sais pas où brancher pul -, dir -, et ENA+ et -
D'avance merci
#27
Donovandu88
-

- Membres
-
- 680 messages
Membre passionné
- Gender:Male
Posté 11 octobre 2017 - 06:07
Tu peux modifier les broches si tu veux. Pas obligé de prendre le 7 et 8 de l'exemple.
#28
Forthman
-
- Membres
-
- 1â¯486 messages
Membre chevronné
- Gender:Not Telling
- Location:Montauban (82)
Posté 11 octobre 2017 - 07:40
Tu as 3 entrées "Signal"
les broches avec écrit (+5v) doivent être reliées au ... +5v directement (ok, là c'est pas dur)
entrée ENA=enable : active ou non le driver. si le driver n'est pas activé, le moteur ne reçoit aucune tension d'alimentation
entrée DIR = direction : sens de rotation du moteur
entrée PUL= impulsion : à chaque passage à l'état bas (0V) sur cette entrée le driver avance d'un pas (suivant DIR)
#29
Mike118
-
- Administrateur
-
- 10â¯308 messages
Staff Robot Maker
- Gender:Male
- Location:Anglet
- Interests:Robotique, Entrepreneuriat, Innovation, Programmation, Résolution de problème, Recherche de solutions, Mécanique, Electronique, Créer, Concevoir
Posté 11 octobre 2017 - 11:44
j'avais mis 7 et 2 pour correspondre au schémas que tu as fournis.
Je pensais que tu voulais un travail pré mâché mais je vois que tu garde ton sens critique donc c'est bien ! ( Tant mieux )
Dans le code le pin enable n'est même pas branché. =) ( pour simplifier Par contre ne pas laisser le moteur arrêté alimenté trop longtemps et toujours vérifier que le moteur pas à pas ne chauffe pas trop. Sinon baisser le courrant max.
Si mon commentaire vous a plus laissez nous un avis !
Nouveau sur Robot Maker ?
Jetez un oeil aux blogs, aux tutoriels, aux ouvrages, au robotscope aux articles, à la boutique et aux différents services disponible !
En attendant qu'une bibliothèque de fichiers 3D soit mise en place n'hésitez pas à demander si vous avez besoin du fichier 3D d'un des produits de la boutique... On l'a peut être !
Si vous souhaitez un robot pilotable par internet n'hésitez pas à visiter www.vigibot.com et à lire le sous forum dédié à vigibot!
#30
Angéla
-
- Membres
- 15 messages
Nouveau membre
Posté 11 octobre 2017 - 11:44
Bonsoir,
Non, non (lol) je me garderais bien de porter une critique car j'en suis toujours à essayer de bien comprendre ce que je fais sur vos conseils.
J'ai bien téléchargé le programme fourni et réglé le driver sur pas entier et 1,5 A.
Le moteur tourne toujours dans le même sens par saccades d'environ 1/2 tour. Est-ce normal ?
Je souhaiterai qu'il tourne régulièrement dans un sens puis dans l'autre et que je puisse varier cette vitesse.
D'avance merci
#31
Mike118
-
- Administrateur
-
- 10â¯308 messages
Staff Robot Maker
- Gender:Male
- Location:Anglet
- Interests:Robotique, Entrepreneuriat, Innovation, Programmation, Résolution de problème, Recherche de solutions, Mécanique, Electronique, Créer, Concevoir
Posté 12 octobre 2017 - 12:44
Pour t'aider au mieux, prendre l'habitude de :
1) Présenter le code que tu as testé => Le copier coller avec les balises codes à minima ou sinon voir sur ce tutoriel indiquant comment publier du contenu
2) Si c'est pas explicité en commentaire dans le code, indiqué quoi est câblé où le plus simple est de faire un schémas. Si vous copiez un schémas d'internet indiquer d'où c'est copié , parfois il peut être intéressant d'ajouter une photo qui peut indiquer un décalage entre ce qu'on crois avoir fait et ce qu'on a fait.
3) pour décrire un fonctionnement problématique parfois une vidéo vaut 1000 mots, juste une vidéo du "bug" peut beaucoup aidé ...
Le moteur tourne toujours dans le même sens par saccades d'environ 1/2 tour. Est-ce normal ?
ça peut être à moitié normale, si le pin dir+ ou dir - est mal branché ... sinon il faut savoir qu'une vitesse de 100 c'est très lent, ça va faire un bruit d'enfer x) il faudrait aller bien plus vite, et augmenter aussi la vitesse max de 2 zéro au moins je dirais x)
Le plus simple est vraiment de reprendre les test d'ashira, et d'apprendre en suivant ce qu'il a fait. C'est un chemin détourné qui permet de gagner du temps. En passant le temps nécessaire pour comprendre ce que tu fais c'est autant de temps que tu vas gagner à ne pas comprendre ce que tu fais et donc pourquoi ça marche pas.
Avant de faire tourner le moteur avec des aller retour, fais le tourner comme il faut dans un sens. si ça marche bien, fais le tourner en continue dans l'autre sens , fais différents essais de vitesse etc si tu as besoin de savoir un peu plus sur les base d'arduino prend le temps se suivre ce petit tuto pour débuter avec arduino ... et dès que tu maîtrise bien le tout tu feras sans problème le code complet qui marche du premier coup
Et si tu as des questions spécifique sur un point bien précis et pas sur " comment on fait le truc complet " tu auras ici sans problème les réponses à tes questions
Si mon commentaire vous a plus laissez nous un avis !
Nouveau sur Robot Maker ?
Jetez un oeil aux blogs, aux tutoriels, aux ouvrages, au robotscope aux articles, à la boutique et aux différents services disponible !
En attendant qu'une bibliothèque de fichiers 3D soit mise en place n'hésitez pas à demander si vous avez besoin du fichier 3D d'un des produits de la boutique... On l'a peut être !
Si vous souhaitez un robot pilotable par internet n'hésitez pas à visiter www.vigibot.com et à lire le sous forum dédié à vigibot!
#32
Angéla
-
- Membres
- 15 messages
Nouveau membre
Posté 12 octobre 2017 - 10:46
Bonjour,
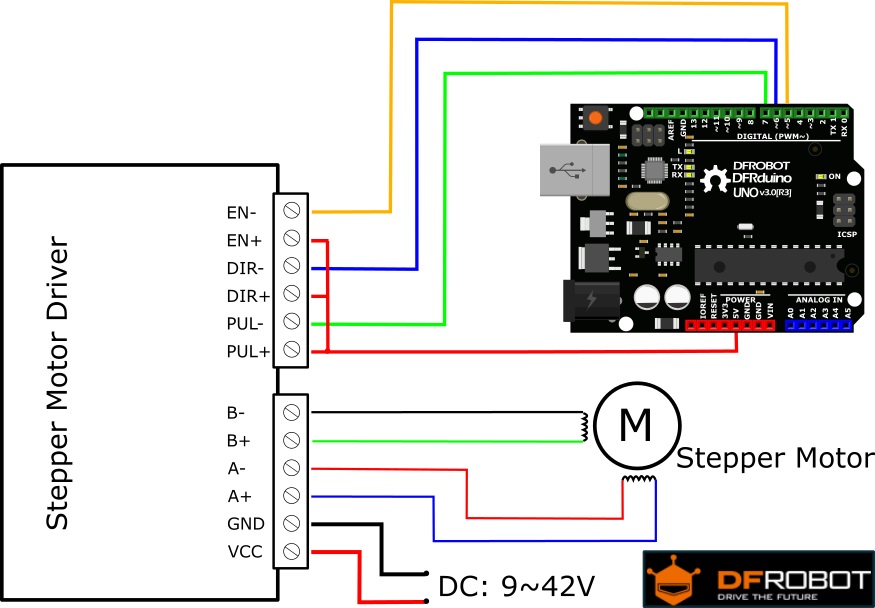
Concernant le schéma de branchement, je le joins en photo. Et j'ai utilisé ton code fourni plus haut.
J'ai simplement pas branché les ENA, branché PUL- sur sortie 7 de l'arduino et DIR- sur sortie 8 de l'arduino.
Je vais bien entendu suivre ton lien pour essayer d'en savoir plus.
Lorsque j'ai acquis le kit arduino, il y avait un PDF avec, que j'ai suivi pas à pas et effectivement, cela paraissait assez simple concernant les leds, le servomoteur et même le petit moteur pas à pas livré avec sont driver où tout est paramétré. J'ai suivi les tutos, et effectivement, en suivant pas à pas le PDF, les choses se passent bien et j'ai "presque" eu l'impression que c'était facile.
Mais lorsque le montage sort du PDF, c'est plus la même.
En fait, je n'ai pas beaucoup de temps libre et je souhaite le consacrer jusqu'à Noel pour construire ce bras robot pour faire un cadeau à mon neveu.
Je suis donc à fond sur le côté mécanique et sur ces fameux engrenages pour augmenter mon couple car même si je l’allège et je raccourci mes prétentions, j'aurai besoin de couple.
D'où mes petits trains d'engrenage pour faire des tests.
Seulement voilà, je n'arrive même pas à faire tourner un moteur à vitesse constante et de manière optimum pour faire mes essais.
Effectivement, dans un premier temps j'aurais bien aimé trouver du code basique tout fait, faire mes essais, faire mon cadeau (si je finalise à temps) et ensuite passer plus de temps sur la compréhension de ce langage qui n'est pas simple pour moi.
Merci pour votre aide
Cordialement
Image(s) jointe(s)
#33
Donovandu88
-
- Membres
-
- 680 messages
Membre passionné
- Gender:Male
Posté 12 octobre 2017 - 02:35
Tu veux faire quoi exactement comme bras robot ?
#34
Angéla
-
- Membres
- 15 messages
Nouveau membre
Posté 12 octobre 2017 - 05:58
Bonjour,
Un bras tout simple 4 axes mais de bonne taille.
Je recherche du couple parce que mon neveu est un fou de jouets "travaux publics".
Donc je souhaite qu'il puisse soulever un peu de poids avec.
Je vais donc faire une structure la plus légère possible (ça je sais faire).
Mon problème porte sur la motorisation et sa programmation.
D'où mes essais à petite échelle avec le montage cité plus haut.
Je suis en train de monter des trains d'engrenage pour augmenter le couple et tester les couples maxi possibles.
Mais je cale déjà pour faire tourner un néma 17 avec son driver de façon régulière pour le monter avec le train d'engrenage.
Donc j'ai le moteur cité plus haut, le montage comme l'image avec une alimentation 12 V (batterie de voiture).
Je cherche à connaitre les meilleurs réglages du driver ( 1,5 à 2 A et pas entier m'a t'on répondu) et un code qui me permette de faire tourner le moteur de façon bien régulière en avant et en arrière.
Merci
#35
Donovandu88
-
- Membres
-
- 680 messages
Membre passionné
- Gender:Male
Posté 12 octobre 2017 - 06:13
Je fais actuellement un bras robot (http://www.robot-maker.com/forum/topic/11216-bras-robot-bcn3d-moveo/) avec justement des Nema 17 dessus et en utilisant la librairie AccelStepper.
Tu vas avoir du mal à avoir de la force avec les Nema 17 même avec des engrenages. Ou alors tu auras un mouvement hyper lent.
Voici un petit code que j'utilisais pour mes essais :
#include <AccelStepper.h>
AccelStepper stepper_bras2(1,3,6);
void setup()
{
stepper_bras2.setMaxSpeed(2000.0);
stepper_bras2.setAcceleration(8000.0);
}
void loop()
{
stepper_bras2.runToNewPosition(6000);
stepper_bras2.runToNewPosition(0);
stepper_bras2.runToNewPosition(-6000);
stepper_bras2.runToNewPosition(0);
}
Il fait aller le moteur de 6000 steps d'un côté et de 6000 steps de l'autre côté en passant par zéro en utilisant les accélérations et décélérations.. Il faut imaginer que lorsque tu allume ton Arduino, la position du moteur est fixé à 0 et que lorsque tu lui dis de faire 6000 steps, il va les faire et quand tu lui dira d'aller à la position 0, il va refaire les 6000 steps à l'envers pour retourner à sa position 0.
Donc si tu lui fais 6000 et ensuite -6000, il va devoir faire 12 000 steps pour aller à la nouvelle position (-6000).
- Mike118 aime ceci
#36
Angéla
-
- Membres
- 15 messages
Nouveau membre
Posté 12 octobre 2017 - 07:45
Merci, je vais le tester.
Cordialement








0 utilisateur(s) li(sen)t ce sujet
0 members, 0 guests, 0 anonymous users




