J'utilise beaucoup http://www.thingiverse.com/
Sur lequel j'ai une galerie également.
Sinon il y a aussi https://grabcad.com/ qui donne accès à toutes sortes de fichiers 3D pour plusieurs logiciels de CAO différent.
Il y a 671 élément(s) pour Donovandu88 (recherche limitée depuis 29-mai 13)
 Posté par
sur 05 mars 2017 - 01:43
dans
Impression 3D et Imprimantes 3D
Posté par
sur 05 mars 2017 - 01:43
dans
Impression 3D et Imprimantes 3D
J'utilise beaucoup http://www.thingiverse.com/
Sur lequel j'ai une galerie également.
Sinon il y a aussi https://grabcad.com/ qui donne accès à toutes sortes de fichiers 3D pour plusieurs logiciels de CAO différent.
Posté par
sur 24 janvier 2019 - 08:43
dans
Bras 6 axes BCN3D Moveo
Pensez-vous que modifier les steps par exemple de 1/16 à 1/32ème, permet vraiment de gagner en précision avec des moteurs qui ont une forte démultiplication derrière? Ou alors je risque de perdre des pas et donc de la précision?
Posté par
sur 21 janvier 2019 - 08:58
dans
Bras 6 axes BCN3D Moveo
Salut, je viens de faire un test de répétabilité avec mon bras robot et j'ouvre ce sujet pour en discuter, améliorer.
J'ai des résultats assez bon pour certaines articulations et médiocre pour d'autres.
Je sais que ce n'est pas un bras robot de chez Kuka ou d'Universal robots mais c'est agréable d'avoir un bras robot précis.
J'ai utilisé un comparateur avec une précision de 0.01mm :

Voici la vidéo, suivie des résultats :
Rotation 1 --> Plutôt bien, résultat peut-être à cause de la taille du bras? peut être l’élasticité du plastique?
Bras 1 --> Bon résultat dans l'ensemble 
Bras 2 --> Alors la, c'est la catastrophe!  Il se décale de plus en plus au fur et à mesure... Pourtant c'est celui qui a la plus grande démultiplication. Un moteur avec gearbox de 14:1 et encore une réduction avec la courroie.
Il se décale de plus en plus au fur et à mesure... Pourtant c'est celui qui a la plus grande démultiplication. Un moteur avec gearbox de 14:1 et encore une réduction avec la courroie.
Rotation 2 --> Très moyen, mais le problème vient a coup sur du jeu de la vis M8 utilisée que je n'ai toujours pas retiré 
Bras 3 --> Balancez les confettis! 
 très bon résultats!
très bon résultats!
Posté par
sur 16 juillet 2017 - 09:45
dans
Programmation
J'avais vu que pour les trucs très simples il existait 'MIT app inventor' pour faire des apps sans faire de programmation.
Mais le bluetooth c'est deja peut-etre trop avance pour l'app inventor, et on a ici sur le forum le niveau en programmation pour utiliser android studio
bonjour,
Je vous informe que le logiciel MIT apps inventor 2 gère la communication bluetooth.
+1 MIT App inventor 2 fonctionne très bien en avec le bluetooth et un module HC-05 ou 06 et Arduino.
J'ai une table basse qui fonctionne avec le bluetooth et une application MIT.
.
Posté par
sur 18 octobre 2019 - 11:17
dans
Impression 3D et Imprimantes 3D
Posté par
sur 19 novembre 2018 - 04:10
dans
Impression 3D et Imprimantes 3D
Posté par
sur 17 novembre 2018 - 04:06
dans
Impression 3D et Imprimantes 3D
Posté par
sur 16 décembre 2018 - 03:35
dans
Bras 6 axes BCN3D Moveo
Salut !
Dans le cadre de mon projet de pince pour robot j'ai installé le capteur de courant sur le +5v du servo moteur mais lorsque je récupère les valeurs du courant dans le Serial j'obtiens ceci :
50
43
57
7
85
59
102
0
23
57
etc...
Les valeurs changent tout le temps alors que le servo n'est pas en mouvement. Une idée d'ou sa peut venir?
Posté par
sur 16 décembre 2018 - 08:44
dans
Bras 6 axes BCN3D Moveo
Le capteur de courant que j'ai, c'est celui-ci :
https://www.ebay.fr/...353.m2749.l2649
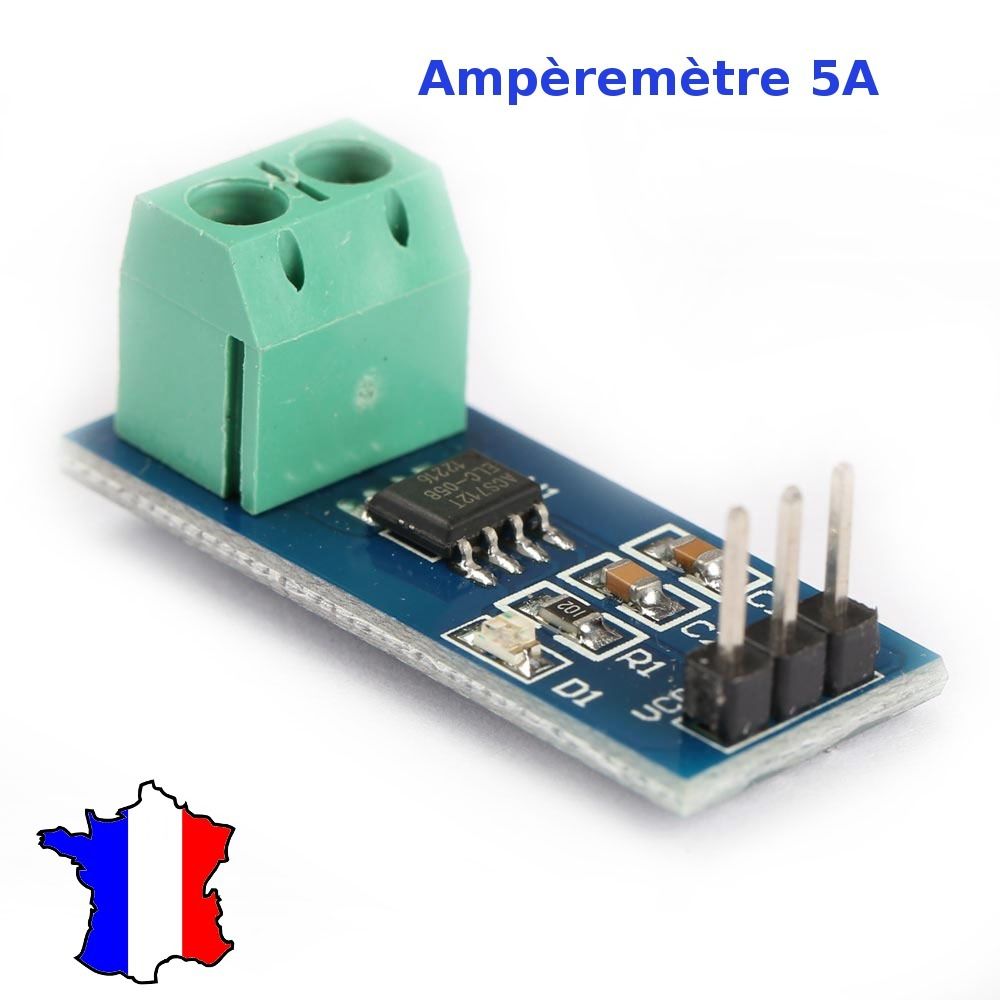
Au bout du bras j'ai un +5v et un GND commun à tout mes capteurs ainsi que mon servo-moteur mais sur le +5V du servo-moteur j'ai branché le bornier (vert) du capteur de courant en serie.
Pour avoir du 5V j'ai un convertisseur 12V-->5V
Peut-être qu'il y a des fluctuations de courant à cause de ça?
Pas de photo du câblage car tout est déjà intégré dans la pince du robot.
On peut éventuellement faire un sujet séparé si tu veux.
Par contre Forhman, tu me perds un peut ^^
Posté par
sur 18 décembre 2018 - 06:31
dans
Bras 6 axes BCN3D Moveo
Posté par
sur 17 décembre 2018 - 08:14
dans
Bras 6 axes BCN3D Moveo
Déjà, assure-toi que le 5Vcc envoyé à ta carte (le capteur avec l'ACS712) est bien propre, ensuite, il y a bien un filtre
sur la broche 6 mais à mon avis la valeur du condensateur est bien trop petite pour lisser les fluctuations d'un servo.
Je pense qu'il serait plus simple de résoudre ça par programme, mais ça dépend du temps disponible sur ton arduino.
Je n'ai pas d’oscilloscope pour vérifier si le 5V est propre 
Le temps disponible que tu parles, c'est pour savoir si on peut mettre une delay?
Pour en revenir sur la remarque de Forthman, je pense qu'il partait du principe que les variations de courant observées sont dues au fait que comme le servomoteur est asservi en position en fonction de la correction à apporter au moteur pour maintenir la position asservie le moteur va plus ou moins moins consommé...
Essaye de tenir en équilibre en marchant sur une corde, a moins que tu sois super doué, en gros tu vas osciller légèrement un peu à droite et à gauche autour de la position d'équilibre.
C'est un peu ce qu'il se passe lors de l'asservissement en position de ton moteur et ça peut se traduire par des variations plus ou moins élevée de courants.
Dans tous les cas il serait intéressant de remettre les valeurs à l'échel en mA pour voir si ça corresponde à une grande variation ou pas.
Supposant que 0V c'est 0A et 5V c'est 5A
une variation de valeur analogique lue de 50 à 100 => ça nous donne une variation en courant 250 à 500mA ...
Sinon pour " Lisser les valeurs" par "programme " il suffit de faire une moyenne glissante sur les 5 ou 10 dernières valeurs par exemples...
Dans un des exemples sur Ebay, il y a :
"As I wrote, output voltage is proportional to input current. The value that links the two measurements is sensitivity (you can find it on the datasheet) which – for 5A model – has a typical value of 185mV/A. The sensor can measure positive and negative currents (range -5A…5A), so if input current is 0, output value is 2.5V.
We’re going to read output value with one of the analog inputs of Arduino and its analogRead() function. That function outputs a value between 0 (0V in input) and 1023 (5V in input) that is 0,0049V for each increment.
The formula you need to convert units from analogRead() to Ampere is:"

Donc je pourrais comme tu le dis, faire une moyenne des valeurs. Moyenne sur un temps donné ou moyenne simplement sur les dernières valeurs?
Posté par
sur 17 novembre 2018 - 10:45
dans
Impression 3D et Imprimantes 3D
Posté par
sur 16 décembre 2018 - 04:53
dans
Bras 6 axes BCN3D Moveo
La valeur, on peut l'avoir en ce qu'on veut, la j'ai simplement récupéré les valeurs du capteur entre 0 et 1024.
J'ai simplement remarquer que les valeurs dépassent le 120 quand on pince quelque chose mais il y a toujours autan de variations. Je pensais avoir une valeur qui reste plus ou moins fixe mais c'est pas le cas.
Posté par
sur 11 novembre 2018 - 06:50
dans
Bras robots, pinces, tourelles, et autres manipulateurs
Posté par
sur 03 décembre 2017 - 11:56
dans
Mécanique
Posté par
sur 03 décembre 2017 - 09:20
dans
Mécanique
Posté par
sur 02 décembre 2017 - 10:54
dans
Mécanique
Posté par
sur 03 décembre 2017 - 01:23
dans
Mécanique
Posté par
sur 03 décembre 2017 - 06:04
dans
Mécanique
J'ai essayé en mettant les accélérations à la même valeurs que les vitesses et le problème est résolu. Tous mes mouvements finissent bien en même temps.
C'était donc aussi simple que ça.
Posté par
sur 11 novembre 2018 - 12:43
dans
Bras robots, pinces, tourelles, et autres manipulateurs
Posté par
sur 11 novembre 2018 - 09:55
dans
Bras robots, pinces, tourelles, et autres manipulateurs
Posté par
sur 03 décembre 2017 - 06:37
dans
Mécanique
Oui 
Donc :
Vitesses des moteurs en fonction de celui qui a le plus de distance à faire
Réglage des accélérations à la même valeurs que les vitesses.
Posté par
sur 11 novembre 2018 - 05:23
dans
Bras robots, pinces, tourelles, et autres manipulateurs
Posté par
sur 17 novembre 2018 - 10:29
dans
Conseils et aide aux débutants, livres et kits en robotique
Posté par
sur 12 juin 2019 - 06:08
dans
Bras robots, pinces, tourelles, et autres manipulateurs




