Posté par
Posté par
Bonjour,
Je suis passionné d'aviation et je passe beaucoup de temps sur des simulateurs de vol. L'année dernière j'ai entamé la réalisation d'un cockpit de poche et en 2021 je finis tous les projets que j'ai commencé (le sous-marin arrive en dernier, et ce projet-ci est l'avant dernier).
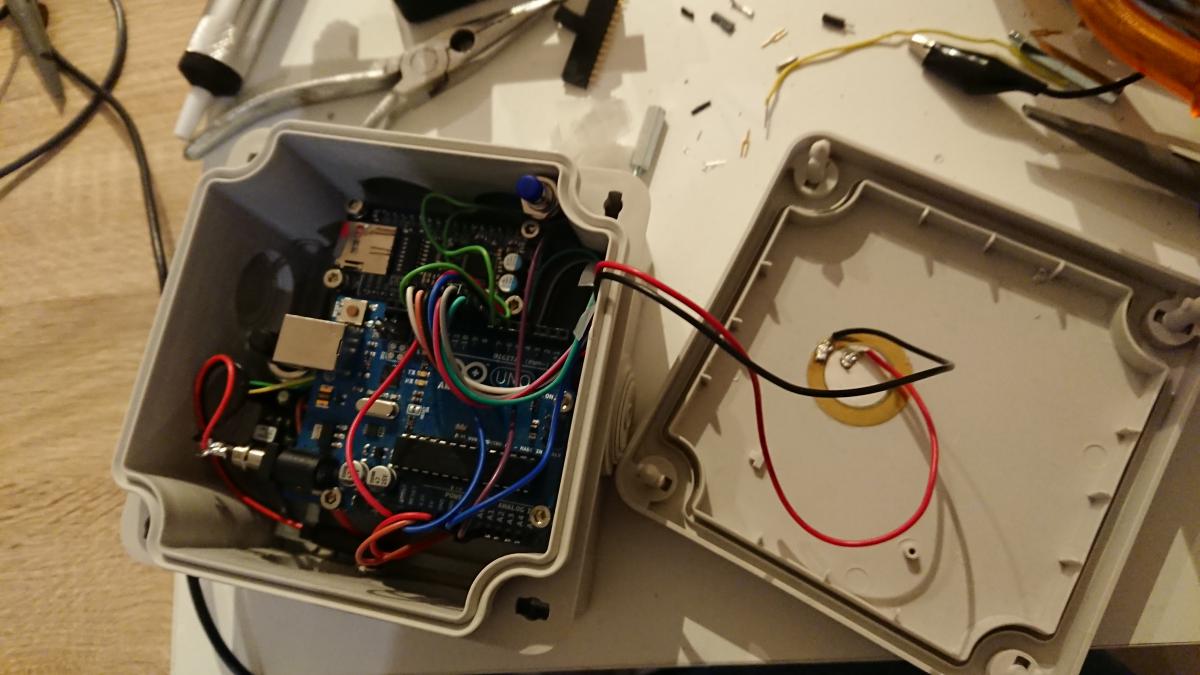
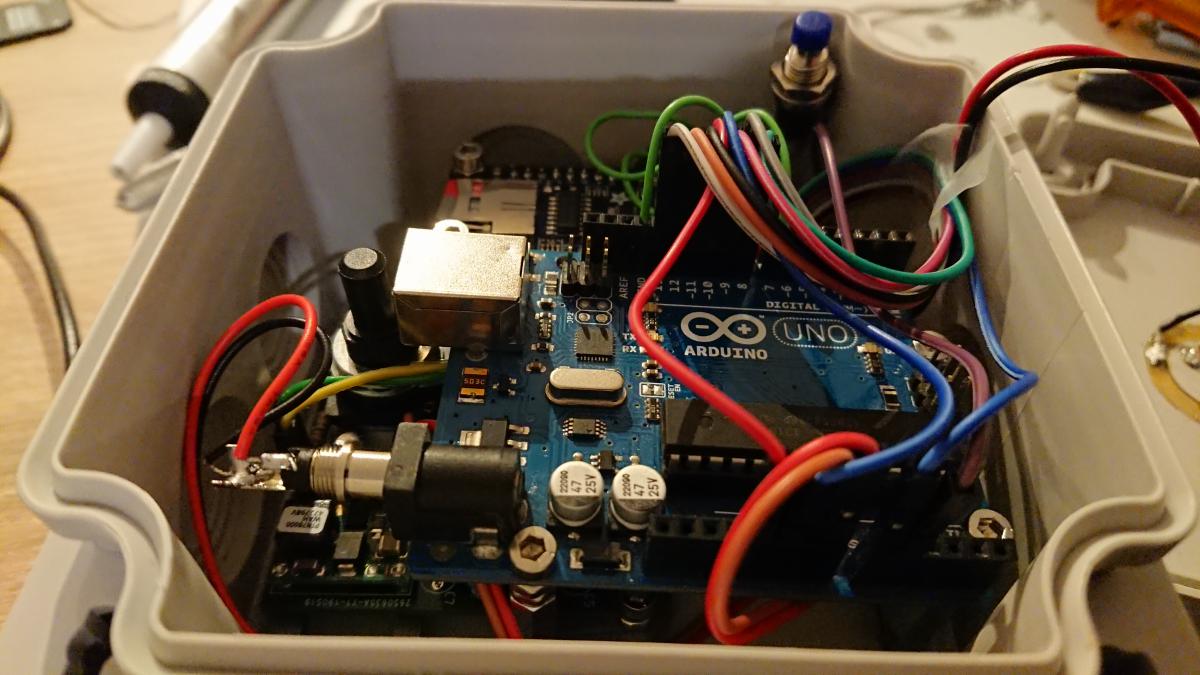
N'étant pas le premier, j'ai suivi les conseils avisés de mes prédécesseurs et j'ai utilisé des moteurs pas à pas x27.168 pour réaliser les instruments. Voici le résultat, branché et fonctionnel avec le simulateur que j'utilise le plus:

Ce n'est pas très parlant pour le moment car il manque les cadrans des instruments avec les graduations : il faudra donc me croire sur parole lorsque je vous dit que mon avion vole à 500 kts indiqués (haut gauche), 15000 pieds (bas gauche) et vers le sud (haut droite). Le quatrième instrument est un variomètre qui n'est pas (encore) fonctionnel.
Je n'ai pas beaucoup apprécié de travailler avec les moteurs x27.168 : je les ai trouvés fragiles et très susceptibles aux perturbations extérieurs (un simple boulon en M2 en acier à proximité du boitier et le moteur ne tourne plus). En plus les connexions ne sont pas évidentes (les moteurs sont prévus pour être monté sur PCB) et leur schéma d'alimentation n'a pas l'air standard (en gros ça marche avec la librairie stepper d'arduino mais pas avec librairie accelstepper, c'est chiant). Coté positif ils permettent effectivement d'aller à 60 RPM ce qui est bien pour mes instruments. La question est la suivante : connaitriez vous des moteurs pas à pas au couple réduit (le moteur n'entraine qu'une aiguille, pas besoin de couple pour cela), avec une vitesse aussi élevé, alimentable en 5V pour moins de 100 mA mais qui serait plus facile à piloter, connecter et installer ?
Aux environs de 15€ pièce.
J'ai essayé les 28BYJ-48 mais la vitesse de rotation culmine à 11 RPM pilotés avec mon Arduino.
Je vous remercie par avance pour vos idées.

 ).
).