Posté par
Posté par
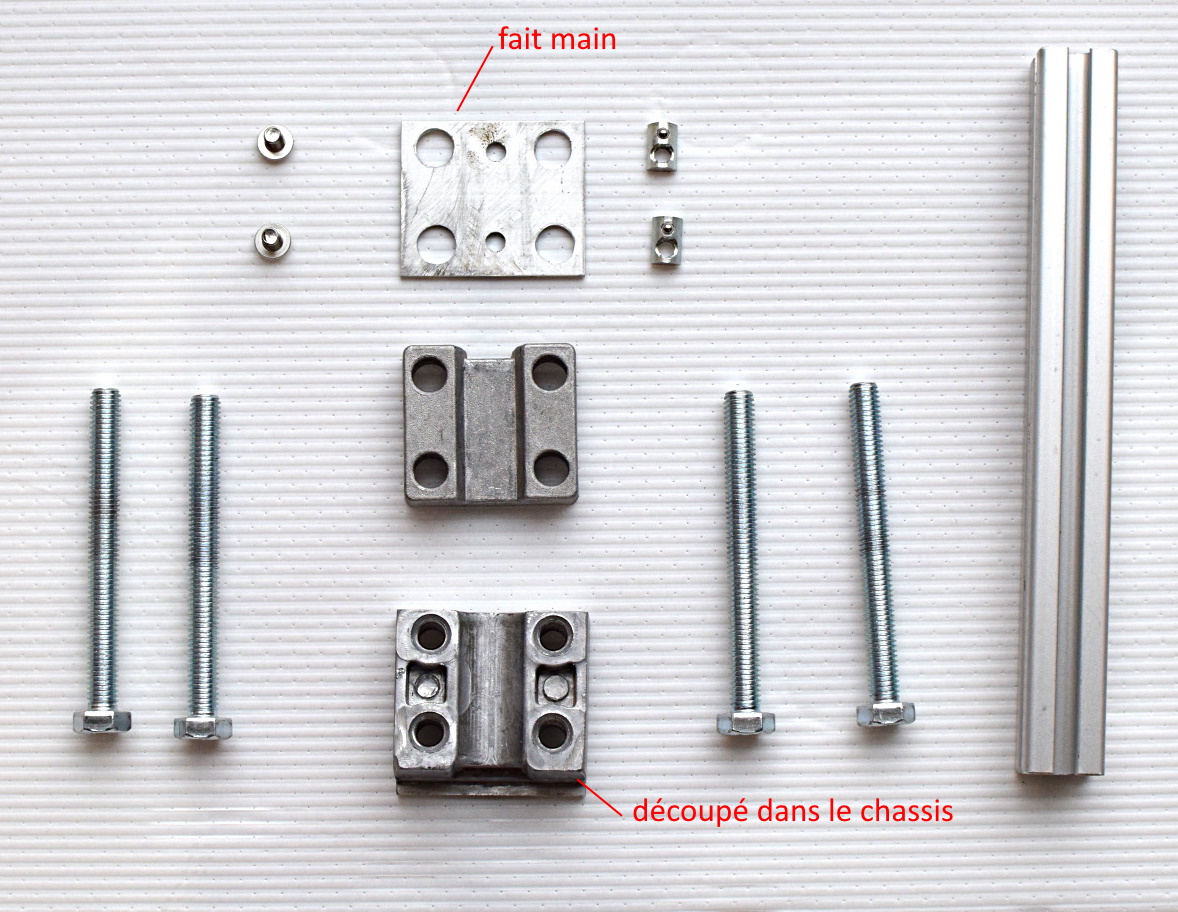
Pour la pièce du dessous je l'ai faite en impression 3D.
Tu as l'intention de faire une alim séparée aussi ?
Oui, je pense qu'une pièce en i3D devrait faire l'affaire. Les axes ne tournent pas, ils sont fixes, donc pas de souci.
J'avais imaginé également un arbre carré en bois reliant les deux axes. Grace au méplats, les axes étaient maintenus par plusieurs colliers de tube de plomberie, vissés sur l'arbre en bois.
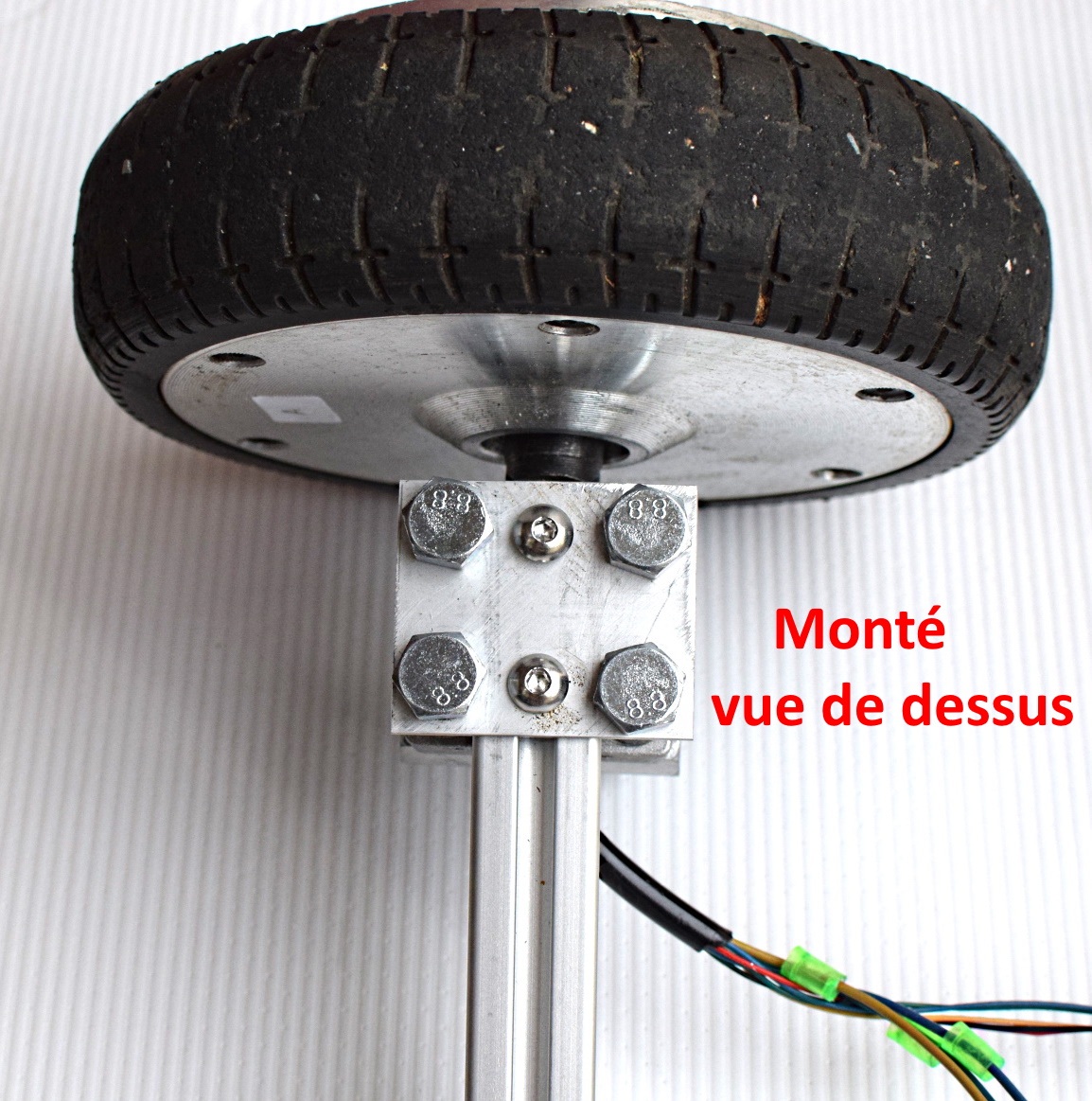
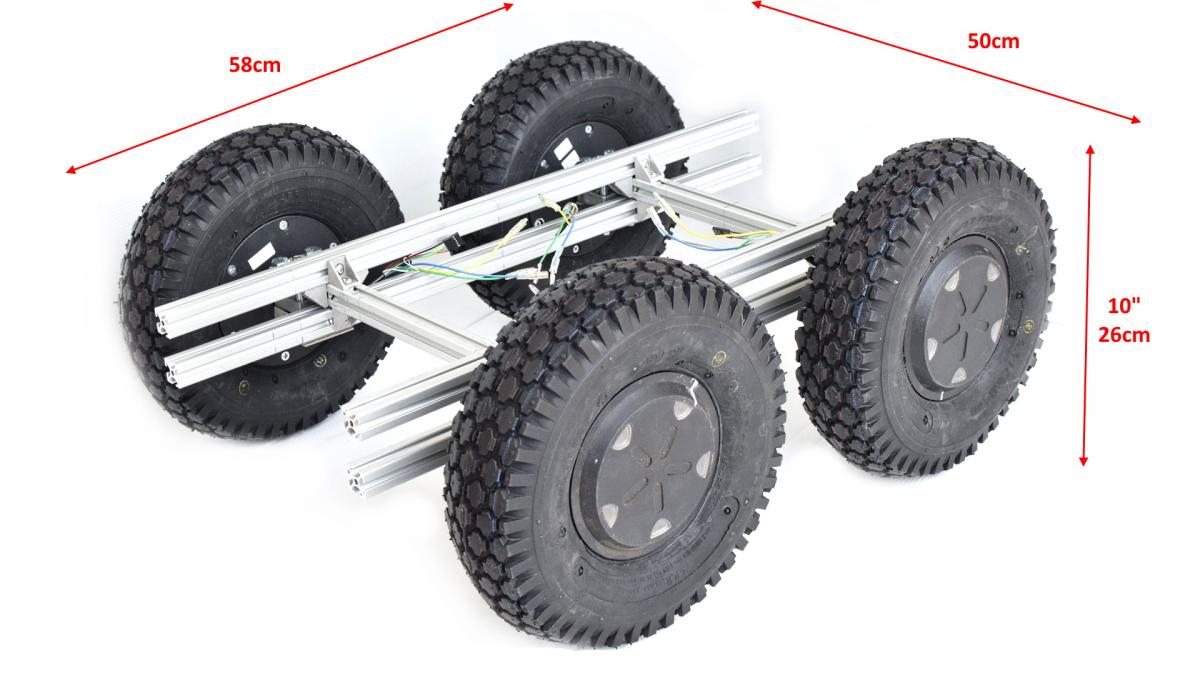
Mais je suis assez content de mon montage avec des profilés. Actuellement, le montage est orienté vers le haut, mais je pense le "couché" pour avoir une symétrie verticale. Comme sur la photo où il y a écrit "vue de côté".
Pour mon Arduino Nano, je n'ai jamais eu de souci. J'ai un bloc standard que j'utilise dans toutes mes réalisations, un Shield Nano Keyestudio avec une petite batterie 2S qui est de la même longueur, située juste en dessous. Bien entendu, je relierai les masses.
Si j'ai un problème, alors j'utiliserai un convertisseur de tension.
Mais pour commencer, je dois juste alimenter le récepteur de la radiocommande. Autant dire, pas grand-chose.
Par contre, as-tu prévu un gros bouton d'arrêt d'urgence et un fusible ? Cela me parait indispensable !