Posté par
Posté par
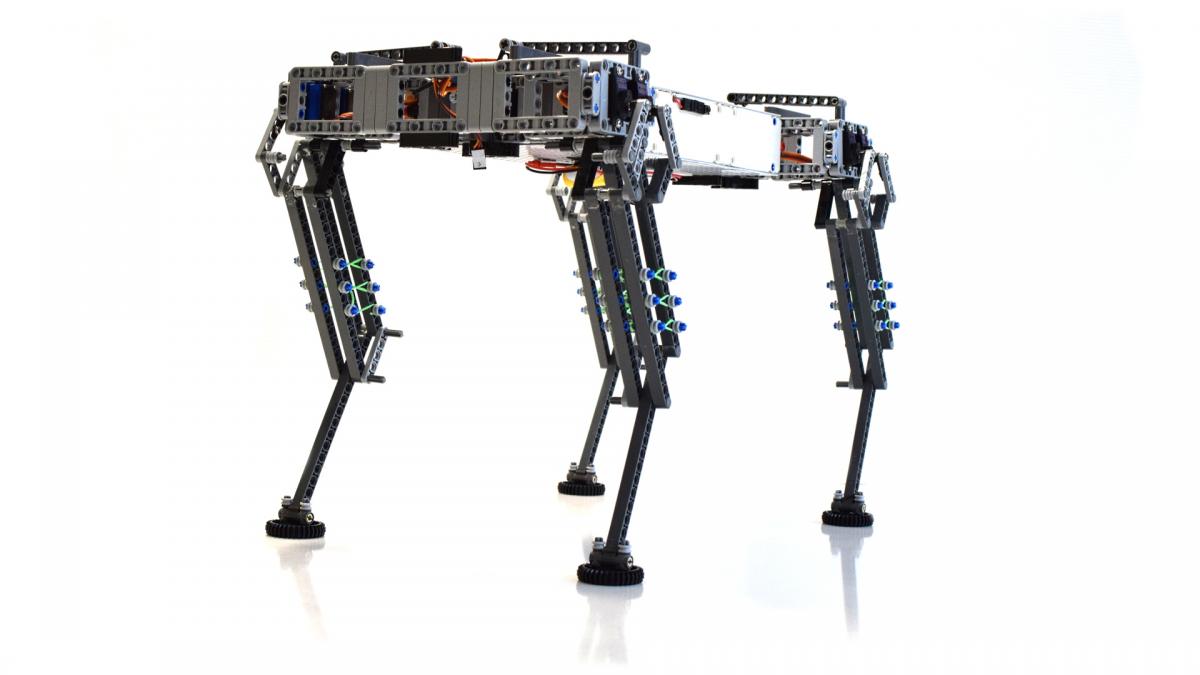
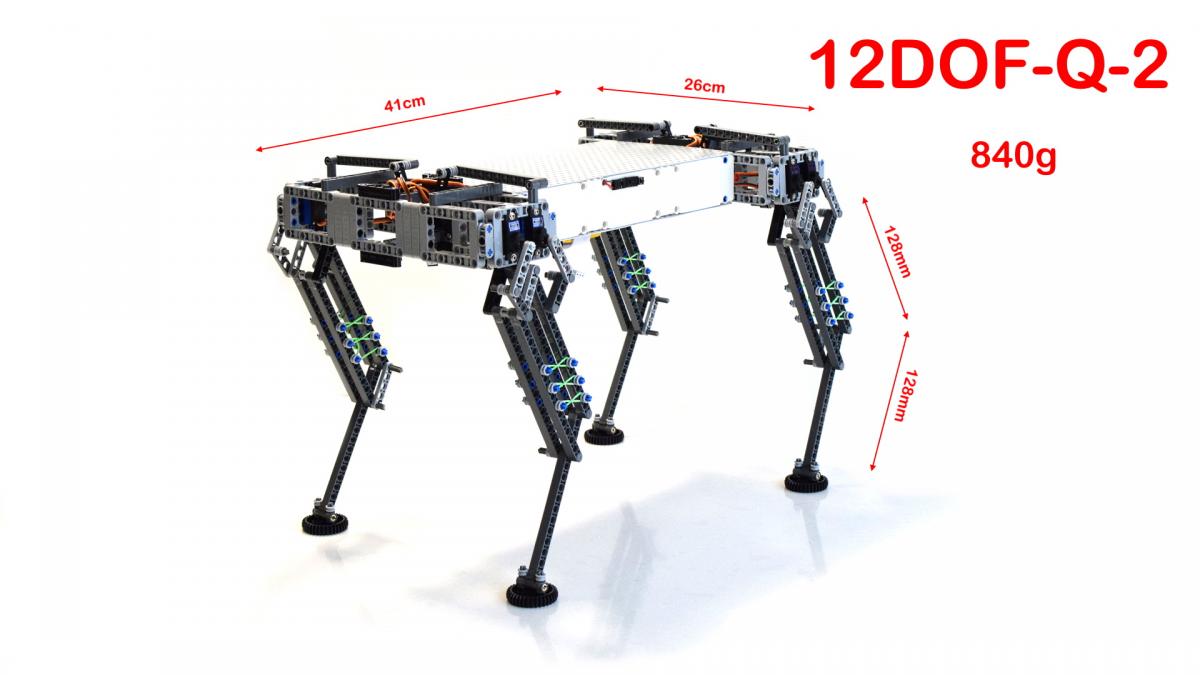
Voici la nouvelle version de mon 12DOF. Il s'agit donc de la V2, d'où le nom 12DOF-Q-2
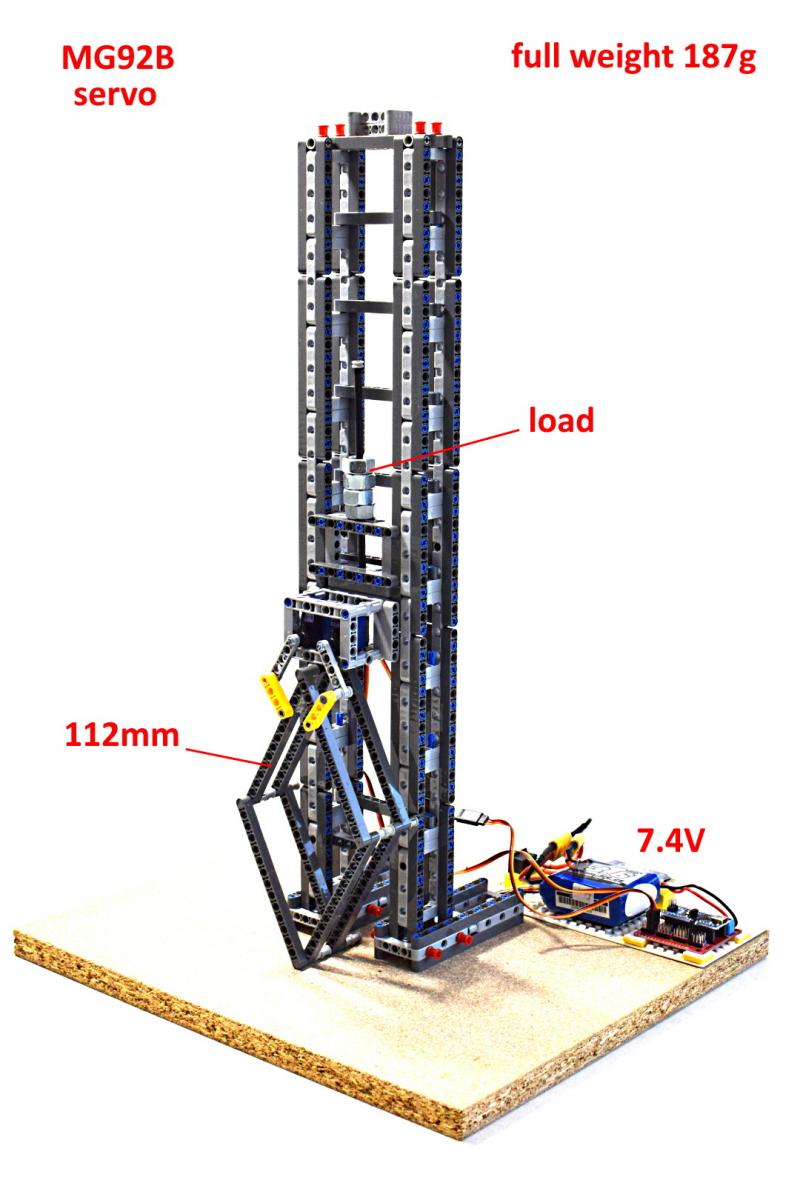
Cette nouvelle version est plus grande tout en conservant les même servos MG92B et la même architecture.
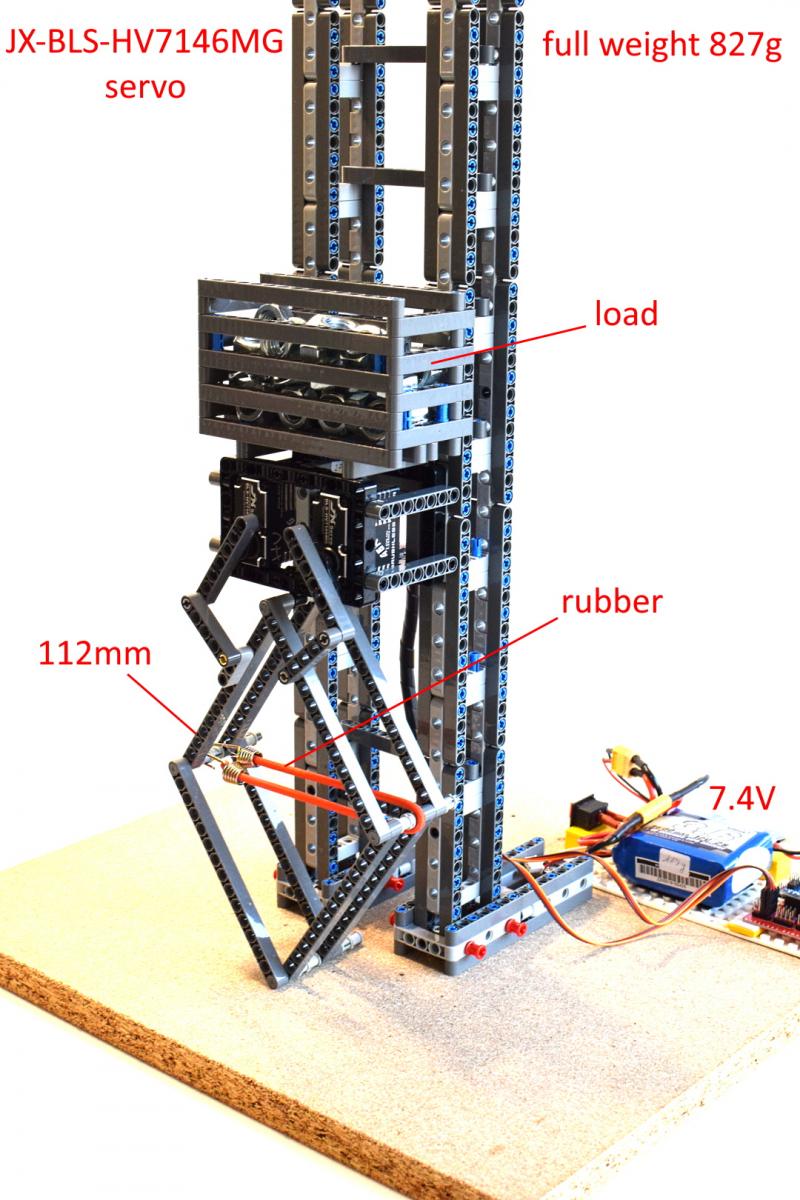
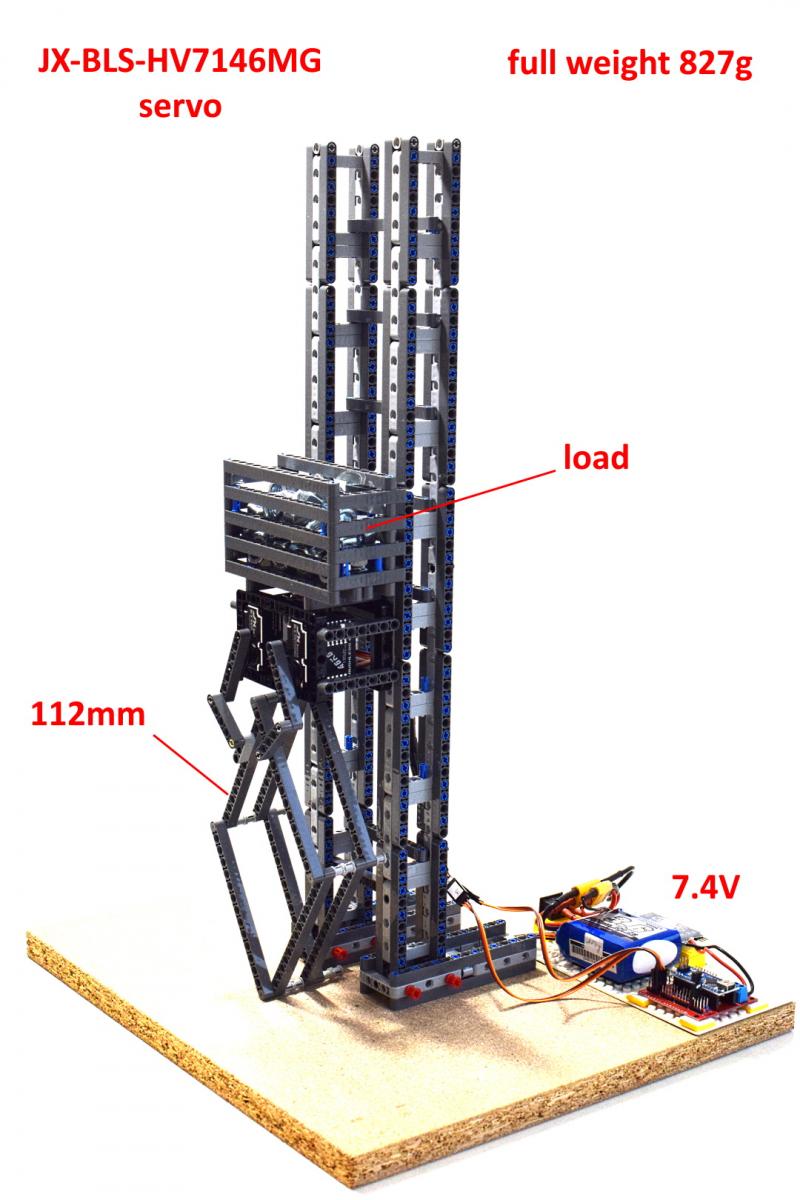
L'un des objectifs est de tester l'apport d'élastiques servant de contrepoids à la structure, permettant ainsi de soulager les servos.
Le fonctionnement sans les élastiques, puis avec les élastiques a été immédiat. Du coup, pas vraiment évident de faire la différence.
Néanmoins, l'allure est plus sautillante avec les élastiques.
Pour l'instant, je ne l'ai testé qu'en 8DOF, mais les 12 servos et leur poids sont bien là. Je testerai les 12DOF ultérieurement.
Ici, on a un quadrupède de bonne taille et je pense avoir encore une petite réserve de puissance, peut-être grâce aux élastiques, pour aller au delà.
Cela me conforte dans l'idée qu'une amélioration continue vaut mieux que des ruptures comme le 12DOF-Q-XL, https://www.robot-ma...-big-quadruped/avec des gros servos qui mènent rapidement à une impasse.
Avec des élastiques, merci Sandro encore une fois, j'essayerai d'augmenter la taille par petit palier. De cette manière, je verrai à quel moment le choix technique montre ses limites.
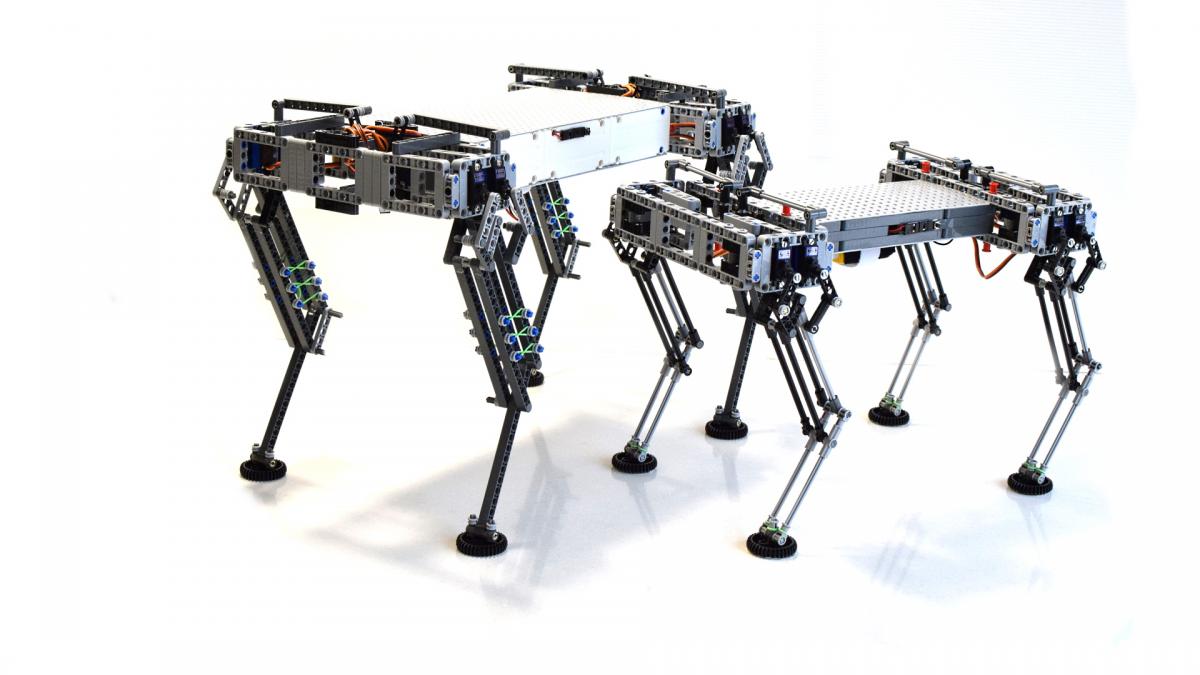
Voici quelques images dont une permet la comparaison avec la version précédente. Notez la présence des 6 élastiques de part et d'autre de chaque patte.
Cliquez moi.

 C'est exactement ce qu'il me fallait
C'est exactement ce qu'il me fallait