Bonsoir,
Personnellement je me détache du sujet, en effet c'était le risque annoncé il y a quelques mois. Même si le sujet regroupe un sentiment positif par tous nous avons, tous des idées bien précise du rendu final.
Même si l'objectif de ma construction est identique à la votre, j'ai pris un autre axe de recherche.
Je vais associer une RP a un ATMEGA328P (arduino lowcost)
Les moteurs seront des pas-à-pas de 12v avec 200 pas, donc roue codeuse par le fonctionnement des pas.
Re-donc batterie 12v
Rp 35 euros
Atmega 9 euros
moteurs 35 euros
capteur 15 euros
roues 5 euros
batterie 20 euros (http://www.atlantique-composants.fr/eGold/Tools/Modules/modListProduct.php?_pstrSubPrj=STORE&pintHeadingID=1&pstrMenusID=1_3_2)
chassis gratuit -> vieux calendrier
il manque la petite électronique
Maintenant mon projet devra pouvoir évoluer en intérieur avec des obstacles et accepter les tapis de 1 cm d'épaisseur
Je vous souhaite bon courage à tous
Gyro49
Contenu de Gyro49
Il y a 244 élément(s) pour Gyro49 (recherche limitée depuis 22-juin 13)
Par type de contenu
Voir pour ce membre
#56078 Un robot collectif, le robot des robot-makers
 Posté par
sur 11 mai 2013 - 10:59
dans
Robotique ludique, robotique insolite
Posté par
sur 11 mai 2013 - 10:59
dans
Robotique ludique, robotique insolite
#56082 Un robot collectif, le robot des robot-makers
Posté par
sur 12 mai 2013 - 11:09
dans
Robotique ludique, robotique insolite
Pour mes composants
Rp 35 euros c'est du classique
Atmega 9 euros Snootlab ou HobbyTronic
moteurs 35 euros HobbyTronic
capteur 15 euros hc-SR04
roues 5 euros http://www.robotshop.com/eu/pair-roues-tamiya.html
batterie 20 euros (http://www.atlantique-composants.fr/eGold/Tools/Modules/modListProduct.php?_pstrSubPrj=STORE&pintHeadingID=1&pstrMenusID=1_3_2)
chassis gratuit -> vieux calendrier
il manque la petite électronique
Gyro49
Rp 35 euros c'est du classique
Atmega 9 euros Snootlab ou HobbyTronic
moteurs 35 euros HobbyTronic
capteur 15 euros hc-SR04
roues 5 euros http://www.robotshop.com/eu/pair-roues-tamiya.html
batterie 20 euros (http://www.atlantique-composants.fr/eGold/Tools/Modules/modListProduct.php?_pstrSubPrj=STORE&pintHeadingID=1&pstrMenusID=1_3_2)
chassis gratuit -> vieux calendrier
il manque la petite électronique
Gyro49
#55204 Un robot collectif, le robot des robot-makers
Posté par
sur 08 avril 2013 - 10:07
dans
Robotique ludique, robotique insolite
Bonjour,
Je suis également partant.
Compétence : imagination débordante
Maintenant 100 euros ça va être juste
Raspberry 35 euros (achat + livraison)
deux moteurs + controleur 20 euros
clef wifi 10 euros (communication et reprgrammation)
communication entre robot IR 15 euros (évolution vers le Swarm bots c'est prétentieux ?)
Chassis low cost même avec récupérartion 5 euros (visserie et autres)
capteurs ???
arduino en esclave pour les mouvements???
webcam 15 euros (OpenCV)
Un serveur, chaque robot pouvant se connecter au serveur pour le Swarm bots. Personnellement je vais me monter deux chassis avec deux Pi et un Nas afin de faire des test sur le Swarm.
Il va falloir augmenter le budget si on veut un robot mobile interacrtif évolutif.
Gyro49
Je suis également partant.
Compétence : imagination débordante
Maintenant 100 euros ça va être juste
Raspberry 35 euros (achat + livraison)
deux moteurs + controleur 20 euros
clef wifi 10 euros (communication et reprgrammation)
communication entre robot IR 15 euros (évolution vers le Swarm bots c'est prétentieux ?)
Chassis low cost même avec récupérartion 5 euros (visserie et autres)
capteurs ???
arduino en esclave pour les mouvements???
webcam 15 euros (OpenCV)
Un serveur, chaque robot pouvant se connecter au serveur pour le Swarm bots. Personnellement je vais me monter deux chassis avec deux Pi et un Nas afin de faire des test sur le Swarm.
Il va falloir augmenter le budget si on veut un robot mobile interacrtif évolutif.
Gyro49
#55567 Un robot collectif, le robot des robot-makers
Posté par
sur 20 avril 2013 - 10:51
dans
Robotique ludique, robotique insolite
Bonjour,
C'est bizarre mais nous venons de refaire un retour à la page 3 de se post.
Un cahier des charges semble inévitable
Gyro49
C'est bizarre mais nous venons de refaire un retour à la page 3 de se post.
Un cahier des charges semble inévitable
Gyro49
#56218 Un robot collectif, le robot des robot-makers
Posté par
sur 18 mai 2013 - 09:30
dans
Robotique ludique, robotique insolite
#55471 Un robot collectif, le robot des robot-makers
Posté par
sur 15 avril 2013 - 08:51
dans
Robotique ludique, robotique insolite
Bonjour,
Le choix est de partir sur un moteur à CC associé à une roue codeuse.
La carte alim devra gérer les moteurs, la RPi, les capteurs.
Mais comment connecter la RPi, par le mini usb, le GPIO ?
sinon pour l'encodeur j'avais :
http://www.bricobidules.com/index.php?post/2012/03/12/L-encodeur-du-pauvre
Je suis toujours sur le coup, mais je me prends la tête avec ma RPi et opencv.
Gyro49
Le choix est de partir sur un moteur à CC associé à une roue codeuse.
La carte alim devra gérer les moteurs, la RPi, les capteurs.
Mais comment connecter la RPi, par le mini usb, le GPIO ?
sinon pour l'encodeur j'avais :
http://www.bricobidules.com/index.php?post/2012/03/12/L-encodeur-du-pauvre
Je suis toujours sur le coup, mais je me prends la tête avec ma RPi et opencv.
Gyro49
#55299 Un robot collectif, le robot des robot-makers
Posté par
sur 10 avril 2013 - 05:46
dans
Robotique ludique, robotique insolite
Bonjour,
Juste en passant, et je n'ai pas pris le temps de regarder les dernières posts.
Je viens de voir sur internet l'utilisation d'un alume-cigare comme alimentation 5V, ce qui pourrait permettre l'utilisation d'une batterie 12v pour les moteurs pas à pas (200 pas donc plus besoin d'encodeur).
Avec un simple L293B par moteur il n'y aurais pas besoin composant en plus.
Gyro49
Juste en passant, et je n'ai pas pris le temps de regarder les dernières posts.
Je viens de voir sur internet l'utilisation d'un alume-cigare comme alimentation 5V, ce qui pourrait permettre l'utilisation d'une batterie 12v pour les moteurs pas à pas (200 pas donc plus besoin d'encodeur).
Avec un simple L293B par moteur il n'y aurais pas besoin composant en plus.
Gyro49
#55313 Un robot collectif, le robot des robot-makers
Posté par
sur 10 avril 2013 - 08:53
dans
Robotique ludique, robotique insolite
Je voudrais savoir, d'une façon très "vague" l'objectif du robot.
Je suis très cartésien, il me faut une vision claire du produit.
J'ai bien compris la démarche générale avec la notion de travail en groupe pour un projet évolutif -> oui et re-oui
def : Un robot-maker (faudra donner un nom au projet) -> unité mobile et autonome en énergie... euh ! des roues ou des pattes ?
Avant de parler du choix du matériel, est ce qu'il ne serait pas judicieux de parler finalité, objectifs:
pour le chassis :
"A la fin de ce module les participants auront produit une base capable de se déplacer sur un sol plat | accidenté | en extérieur pendant une heure sans recharge"
pour la vision :
"A la fin de ce module les participants auront produit une option de pour la base ci-dessus capable de reconnaître des formes | des couleurs et d'informer la base de l'environnement"
pour une pince :
"A la fin de ce module les participants auront produit une pince pour la base ci dessus capable de saisir un objet (poids, volume)" l'option vision sera une condition de bon fonctionnement ou la vision n'est pas une obligation.
la station de rechargement :
"A la fin de ce module les participants auront produit une station de rechargement pour la base ci-dessus capable d'indiquer sa position par IR"
Je suis très scolaire.
Pour moi si nous ne sommes pas tous sur la même vision d'un rendu final, il y aura divergence en milieu de parcours voir incompréhension et le pire grogne et aigreur de certaine personnes qui se sentirons évincée après des ANNEES et des ANNEES de participations.
Nous avons abordé le prix de départ (100) mais avez vous un volume pour la machine.
Moi je suis en déplacement, glisser le châssis dans mon sac serait génial avec moins d'un kilo et le volume d'un dictionnaire pourrait correspondre.
Pour finir, dans le dernier MagPi, il y a un article pour une alimentation d'une RPi
Gyro49
Je suis très cartésien, il me faut une vision claire du produit.
J'ai bien compris la démarche générale avec la notion de travail en groupe pour un projet évolutif -> oui et re-oui
def : Un robot-maker (faudra donner un nom au projet) -> unité mobile et autonome en énergie... euh ! des roues ou des pattes ?
Avant de parler du choix du matériel, est ce qu'il ne serait pas judicieux de parler finalité, objectifs:
pour le chassis :
"A la fin de ce module les participants auront produit une base capable de se déplacer sur un sol plat | accidenté | en extérieur pendant une heure sans recharge"
pour la vision :
"A la fin de ce module les participants auront produit une option de pour la base ci-dessus capable de reconnaître des formes | des couleurs et d'informer la base de l'environnement"
pour une pince :
"A la fin de ce module les participants auront produit une pince pour la base ci dessus capable de saisir un objet (poids, volume)" l'option vision sera une condition de bon fonctionnement ou la vision n'est pas une obligation.
la station de rechargement :
"A la fin de ce module les participants auront produit une station de rechargement pour la base ci-dessus capable d'indiquer sa position par IR"
Je suis très scolaire.
Pour moi si nous ne sommes pas tous sur la même vision d'un rendu final, il y aura divergence en milieu de parcours voir incompréhension et le pire grogne et aigreur de certaine personnes qui se sentirons évincée après des ANNEES et des ANNEES de participations.
Nous avons abordé le prix de départ (100) mais avez vous un volume pour la machine.
Moi je suis en déplacement, glisser le châssis dans mon sac serait génial avec moins d'un kilo et le volume d'un dictionnaire pourrait correspondre.
Pour finir, dans le dernier MagPi, il y a un article pour une alimentation d'une RPi
Gyro49
#67472 Réalisation d'une base mécanique pour CNC : quelques questions préléminaires
Posté par
sur 23 février 2016 - 12:03
dans
Machines de fabrication
Bonjour
Pour une CNC laserj'avais ça en stock
Si tu veux j'ai fait une CNC format légèrement inférieur au A3 pour 150 euros.
Les photos ce week end.
Pour la fixation des moteurs sur les tiges filletées voir le post
Cordialement
#65545 RasPi avec Apache et CGI
Posté par
sur 21 octobre 2015 - 09:12
dans
Programmation
bonsoir
en effet
il faut un "d" à mod
sudo apt-get install apache2 php5 libapache2-mod-php5 -y
#65547 RasPi avec Apache et CGI
Posté par
sur 21 octobre 2015 - 09:50
dans
Programmation
Pour python, en effet il est inclus dans la distribution d'origine.
Il apparait lors de l'update ou du lupgrade dans la liste des mise à jour
Bonne programmation
#67605 Réalisation d'une base mécanique pour CNC : quelques questions préléminaires
Posté par
sur 27 février 2016 - 07:43
dans
Machines de fabrication
Oups j'ai bien une photo global que j'ai oubliè

#65526 RasPi avec Apache et CGI
Posté par
sur 16 octobre 2015 - 10:03
dans
Programmation
je viens même de modifier les scripts pour plus de fun
#!/usr/bin/env python import os import time import subprocess cmd = 'raspistill -w 640 -h 320 -o /var/www/photo.jpg 1>/media/share/raspistill_ok.txt 2>/media/share/raspistill_error.txt' pid = subprocess.call(cmd, shell=True)
et le php
<?php
if (isset($_POST['valider']))
{
echo "test";
system("sudo python /home/pi/raspistill.py");
}
?>
<html>
<head><title>KBOT</title></head>
<body>
<form action="<?php $_SERVER['PHP_SELF'] ?>" method="post">
<input type='submit' name='valider'>
</form>
<img src="photo.jpg" alt="Smiley face" height="150" width="300">
</body>
</html>
#67725 Réalisation d'une base mécanique pour CNC : quelques questions préléminaires
Posté par
sur 04 mars 2016 - 12:24
dans
Machines de fabrication
En effet les connecteurs ne sont pas fait pour ça, mais il supportent bien la charge.
J'ai un peu triché, comme c'est des DB25, j'utilise une paire pour un signal, doncpour les 6 fils du moteur j'utilise 12 fils du cable imprimante.
Pour la question du jeu, je n'ai rien remarqué, maintenant l'utilisation c'est :
-gravure de PCB
-usinage de PVC, il faut être patient et ne pas trop en demander à chaque passe.
J'ai l'intention de ma faire une imprimante 3D, donc je vais commander de plus gros moteurs pour la CNC et échange avec la 3D
A y refaire, je mettrais mes controleurs plus près des moteurs.
#67722 Réalisation d'une base mécanique pour CNC : quelques questions préléminaires
Posté par
sur 04 mars 2016 - 09:25
dans
Machines de fabrication
#67593 Réalisation d'une base mécanique pour CNC : quelques questions préléminaires
Posté par
sur 27 février 2016 - 05:25
dans
Machines de fabrication
Bonjour,
Je suis de retour avec ma CNC entièrement bricolage maison
Donc pour 150 euros:
1 raspberry (35 euros)
1 Atmega 328p avec son quartz 16MHz et ses deux condensateur (5 euros)
3 moteurs pas-à-pas (3x15euros)
3 Contrôleurs de Moteur Pas-à-Pas EasyDriver (3x10 euros)
1 alimentation 12 v (récup sinon 15 euros sur amazon)
Tube acier diamètre 20 mm de chez brico dépot 4x1.00
Tige filleté de 8 mm de chez brico dépot 2x0.80euro
Tige filleté de 6 mm de chez brico dépot 1x0.80euro
équerre alu (pour les chariots de déplacement) bricot dépot
Roulement à bille de Roller de chez Décathlon
les chevilles laiton et les entretoise sont de leroy merlin
Sinon le bois c'est de la récup.
Les ressorts récup garagiste
option:
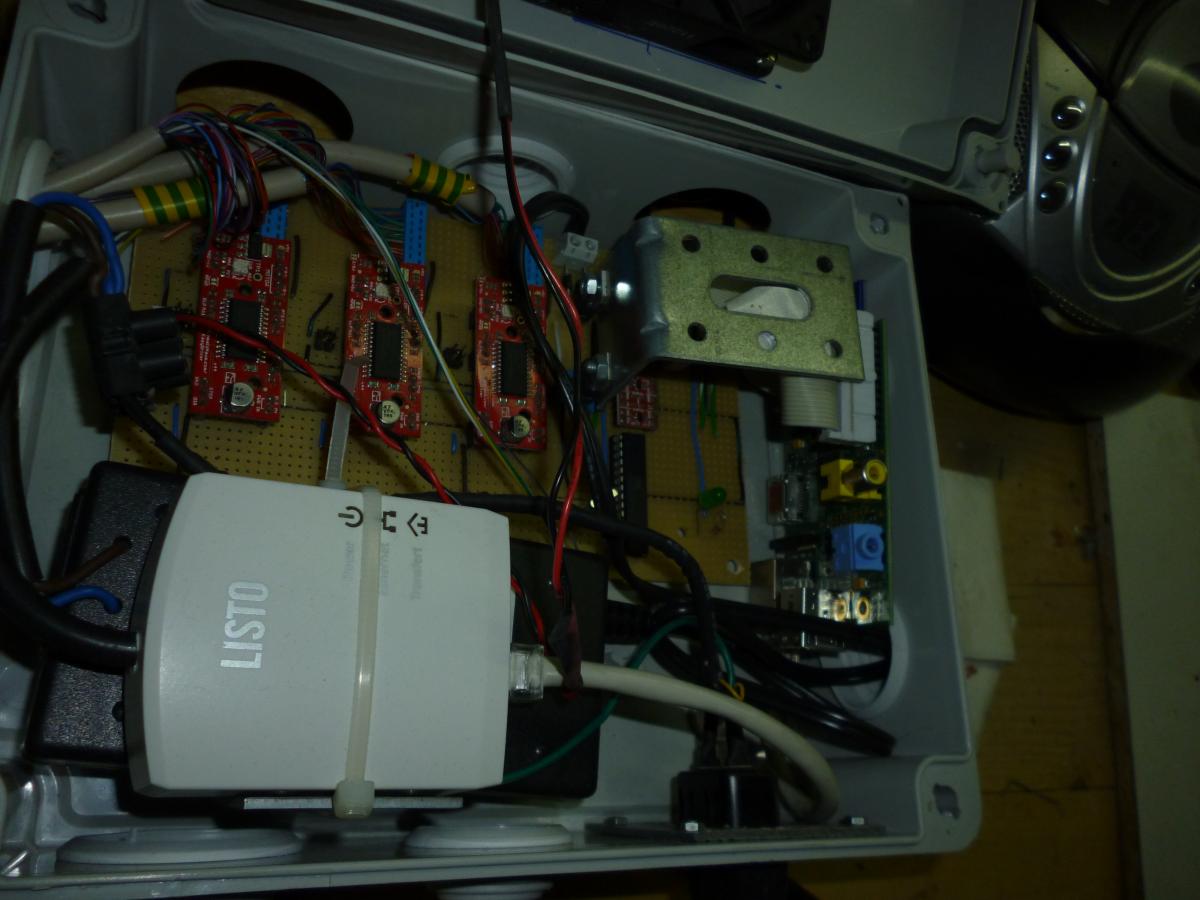
-un boitier CPL 15 à 20 euros permet d'envoyer par réseau de mon buerau à l'autre bout du sous-sol les GCode à réaliser.
Ci-dessous la CNC et son boitier gris de controle
Ci-dessous la tige filletée (8mm) de déplacement et écrou allongé (entretoise) et son ressort pour limiter les jeux et l'écrou papillon

Ci dessous l'un des deux rails de dépaclement par axe la tige filletée de 6mm sert à faire la tension sur les roulements

Pour finir mon boitier de contrôle
Donc la raspberry pousse dans l'atmega ligne après ligne du gcode via la connexion RX / TX
pour le script python le lien
Pour l'Atmega j'ai suivi cette méthode
Bon c'est vrai je suis plus vers les 170 euros.
A bientôt
#65511 RasPi avec Apache et CGI
Posté par
sur 14 octobre 2015 - 11:30
dans
Programmation
Bon ben alors
cmd = 'raspistill -w 640 -h 320 -o /media/share/camera/photo.jpg 1>/media/share/raspistill_ok.txt 2>/media/share/raspistill_error.txt'
Sachant que le 1> c'est lorsque tout va bien et le 2> c'est pour les bugs
.
Maintenant il doit y avoir l'un des deux fichiers avec raspistill_ok.txt de vierge parce qu'il n'y a rien à dire quand tout va bien.
Dans PHP il faudrait essayer les deux commandes pour voir
system("sudo python /media/share/raspistill.py");
exec("sudo python /media/share/raspistill.py");
#65525 RasPi avec Apache et CGI
Posté par
sur 16 octobre 2015 - 09:49
dans
Programmation
Là je craque
chez moi ça marche et je suis reparti depuis le dédut avec une raspberry B
1) formatage avec l'image 2015-02-16-raspbian-wheezy.img
2) dans raspi-config
- expand Filesystem
- enable camera -> enable
- advance option
- SSH -> enable
- update
3) sudo nano /etc/default/keyboard
remplacement de gb par fr
4) sudo reboot
5) sudo apt-get update && sudo apt-get upgrade -y
6) sudo nano /etc/network/interfaces
paramétrage d'une adresse static
7) sudo apt-get update && sudo apt-get upgrade && sudo apt-get dist-upgrade && sudo apt-get autoremove
8) sudo apt-get install apache2 php5 libapache2-mo-php5 -y
correction : sudo apt-get install apache2 php5 libapache2-mod-php5 -y
9) cd media
sudo mkdir share
cd share
sudo mkdir camera
10) sudo nano /etc/sudoers
ajout de : www-data ALL = NOPASSWD: ALL
11) sudo nano /media/share/raspistill.py
#!/usr/bin/env python import os import time import subprocess cmd = 'raspistill -w 640 -h 320 -o /media/share/camera/photo.jpg 1>/media/share/raspistill_ok.txt 2>/media/share/raspistill_error.txt' pid = subprocess.call(cmd, shell=True)
12) sudo python /media/share/rasptistill.py
ok -> la photo dans le répertoire camera et les deux fichiers txt
13) controle paranoiaque -> modification de la cmd en indiquant un mauvais répertoire pour la photo
cmd = 'raspistill -w 640 -h 320 -o /media/share/camera2/photo.jpg 1>/media/share/raspistill_ok.txt 2>/media/share/raspistill_error.txt'
14) sudo nano /media/share/raspistill_error.txt
presence de lignes confirmant l'erreur de répertoire
15) remise en place de cmd + sudo rm /media/share/raspistill_ok.txt + sudo rm /media/share/raspistill_error.txt
16) sudo nano /var/www/index.php
<?php
if (isset($_POST['valider']))
{
echo "test";
system("sudo python /home/pi/raspistill.py");
}
?>
<html>
<head><title>KBOT</title></head>
<body>
<form action="<?php $_SERVER['PHP_SELF'] ?>" method="post">
<input type='submit' name='valider'>
</form>
</body>
</html>
17) dans firefox ip_raspberry/index.php
clique sur le bouton
18) ls -l /media/share
les deux fichiers txt sont de retour
Franchement je n'ai rien fait de plus donc je suis complétement largué sur le problème.
#65515 RasPi avec Apache et CGI
Posté par
sur 14 octobre 2015 - 03:44
dans
Programmation
Oui je sais mon humour est complétement nul.
Sauf erreur de copier/coller
dans le script PHP il ne faut pas faire référence à la zone de texte
if (isset($_POST['variable']))
il faut faire référence au submit
if (isset($_POST['valider']))
{
echo "test";
system("sudo python /media/share/raspistill.py");
}
Si le "test" du echo apparaît c'est que c'est bon
Maintenant je rejoins complétement les propose de R1D1
Il faudra ajuster au plus juste les droits en modification dans /etc/sudoers et faire un controle des variables $_POST.
Par ailleurs, attention à l'exécution de commande système dans lesquelles rentre du texte d'un utilisateur tiers. Il faut bien penser à traiter le texte en question pour éviter les injections de code par formulaire. SURTOUT quand tu exécutes avec un sudo, sans password et n'importe quelle commande (ALL).
Les échanges dans ce post n'ont pas vocation à devenir les lignes de codes d'un produit fini.
#65514 RasPi avec Apache et CGI
Posté par
sur 14 octobre 2015 - 03:38
dans
Programmation
J'ai trouvé, je suis trop fort.
Mais je vous le dirais pas la solution 
#65517 RasPi avec Apache et CGI
Posté par
sur 14 octobre 2015 - 08:41
dans
Programmation
Bon là c'est vraiment bizarre
Mais il semble que tu ne soit pas le seul
http://stackoverflow.com/questions/2230391/php-shell-exec-and-sudo-must-be-setuid-root
http://webkul.com/blog/sudo-su-results-effective-uid-0-sudo-installed-setuid-root/
Et si tu remplace dans la page en PHP raspistill.py par un autre de tes programmes qui fonctionne qu'est ce que ça donne.
Ces derniers jours as-tu relancé un upgrade
sudo apt-get update && sudo apt-get upgrade && sudo apt-get dist-upgrade && sudo apt-get autoremove
Bon je suis un peu largé, je vais me refaire une installation depuis la base et je vais voire ce que ça donne
#57724 Hexapode et Raspberry PI
Posté par
sur 05 septembre 2013 - 12:20
dans
Robots à pattes et jambes, humanoïdes, bipèdes, quadrupèdes, hexapodes ...
Bonjour,
Comment avez-vous géré le flux vidéo de la Caméra PI, en mode SSH je n'ai pas d'image alors que l'écran branché en Hdmi lui affiche la vidéo.
A bientôt
Comment avez-vous géré le flux vidéo de la Caméra PI, en mode SSH je n'ai pas d'image alors que l'écran branché en Hdmi lui affiche la vidéo.
A bientôt
#65453 Moteur et tige filtée ?
Posté par
sur 08 octobre 2015 - 02:45
dans
Mécanique
Bonjour,
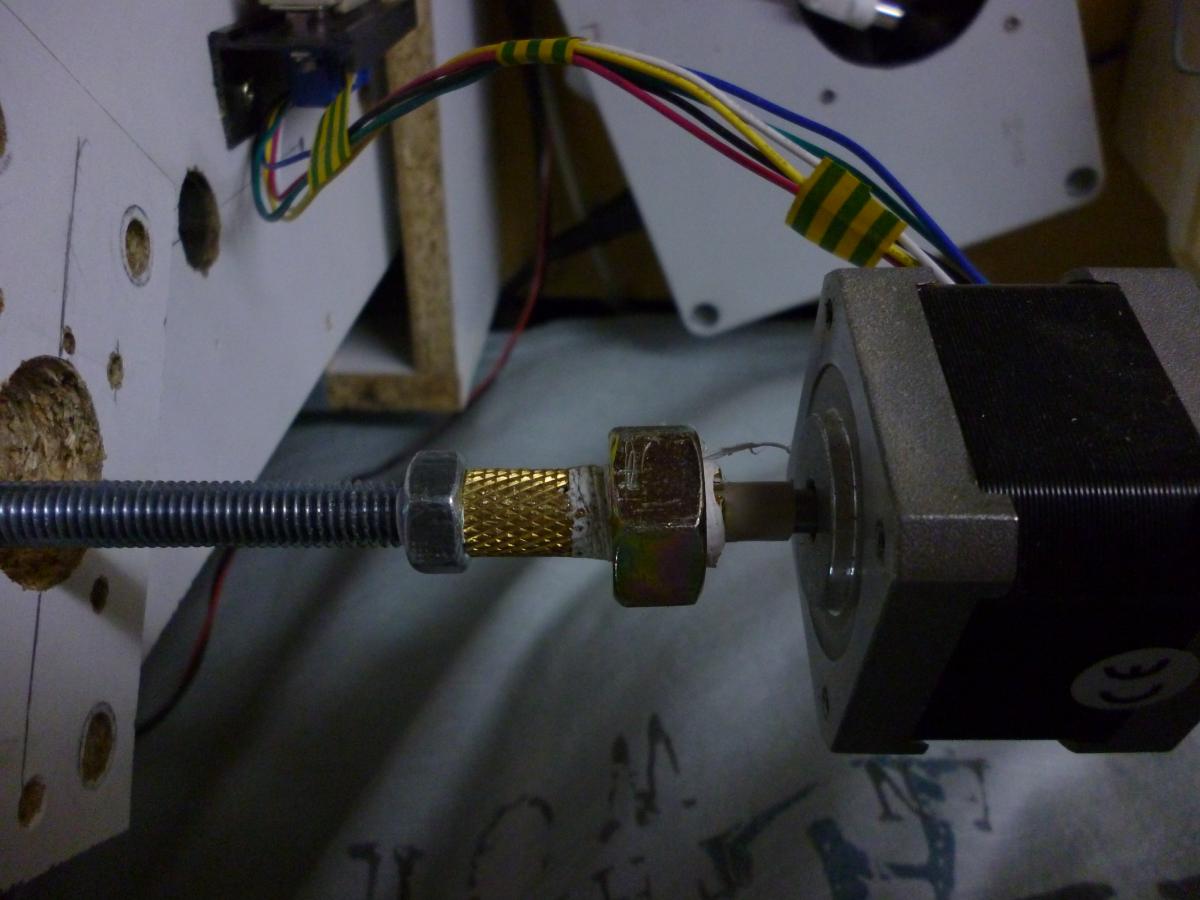
Personnelement j'ai utilisé des chevilles laiton pour tige filletée
Forcément elles ne sont pas pensées pour ça ... donc :
-Sur l'axe du moteur une gaine thermo-récractable ce qui va créer une prise pour la cheville.
-Placer un écrou derrière la cheville sur la tiige filletée
-Visser la cheville sur le bout de la tige filletée
-Faire "glisser" un deuxième écrou sur la cheville jusqu'au contact du premier (le deuxième doit exactement être du diamètre extérieur de la cheville).
-Visser la tige filletée dans la cheville pour lui "ouvrir la bouche" afin d'accueillir l'axe du moteur et la gaine thermo-rétractable.
-une fois en place faire reculer la tige filleté pour que le cheville se referme un peu sur l'axe du moteur
-faire avancer le deuxième écrou sur la cheville qui est maintenant déformé par la présence de l'axe du moteur
-serrer le premier écrou contre la cheville afin de faire "contre-écrou"
Avec cette méthode j'arrive à faire avancer parfaitement mes plateaux de ma CNC.
A bientôt
PS si vous voulez des photos pour mieux comprendre le texte c'est possible.
#65477 Moteur et tige filtée ?
Posté par
sur 10 octobre 2015 - 04:06
dans
Mécanique
Comment joindre des photos au message ?
#65480 Moteur et tige filtée ?
Posté par
sur 10 octobre 2015 - 05:53
dans
Mécanique
Donc je suis de retour
P1030530.jpg c'est la liste des course