Tu utilises quel module toi ? Il t'a coûté combien ? Et tu as quel portée effective testée ?
Je vous ai fait un résumé ici
Il y a 481 élément(s) pour Ulysse (recherche limitée depuis 09-juin 13)
 Posté par
sur 05 décembre 2018 - 10:29
dans
Electronique
Posté par
sur 05 décembre 2018 - 10:29
dans
Electronique
Tu utilises quel module toi ? Il t'a coûté combien ? Et tu as quel portée effective testée ?
Je vous ai fait un résumé ici
Posté par
sur 05 décembre 2018 - 12:34
dans
Electronique
Pas de souci,
l'échange de données par ce module radio m'a semblé très adapté à ton besoin, simple et rapide à mettre en œuvre pour une portée supérieure au wifi.
N’hésite pas à me demander si besoin.
Posté par
sur 04 décembre 2018 - 01:35
dans
Electronique
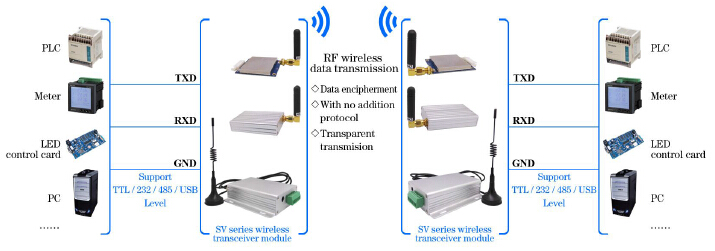
Tu ne serais pas tenté par ce type de matériel qui te permet d'échanger des données par TTL / RS232 / RS485 / USB ?
Posté par
sur 10 juillet 2018 - 10:52
dans
Electronique
Posté par
sur 10 juillet 2018 - 09:45
dans
Electronique
Posté par
sur 04 mai 2017 - 06:17
dans
Servomoteurs, moteurs et autres actionneurs
Posté par
sur 05 mai 2017 - 07:10
dans
Servomoteurs, moteurs et autres actionneurs
Effectivement, c'est moins bien s'il faut l'acheter à part et à ce prix.
Posté par
sur 27 avril 2017 - 07:50
dans
Servomoteurs, moteurs et autres actionneurs
Sinon on conseille de placer une résistance (faible valeur, forte puissance) en série sur l'alimentation pour absorber ce pic.
Posté par
sur 25 avril 2017 - 08:05
dans
Servomoteurs, moteurs et autres actionneurs
Ça se produit lorsqu'un couple s'exerce en opposition au sens de rotation en cours, par exemple lorsqu'on veut le faire changer de sens alors qu'il continue sur sa lancée, dans ton cas à chaque changement de sens du métronome. A ce moment le moteur génère une énergie électrique. Une dynamo quoi.
Des circuits comme le sabertooth de dimensionengineering profitent de ce principe pour recharger la batterie.
Posté par
sur 24 avril 2017 - 02:20
dans
Servomoteurs, moteurs et autres actionneurs
Finalement ce n'est pas si bruyant que ça on dirait.
Du coup c'est bien un potentiomètre multi tour visible sur ce modèle ?
J'observe une variation de la tension sur l'afficheur de l'alimentation, de 15 à 20 VDC surtout lors de la décélération. Serait-ce dû à l'effet "regenerative drive" ?
Posté par
sur 24 avril 2017 - 06:11
dans
Servomoteurs, moteurs et autres actionneurs
Et de toute façon tous les moteurs font du bruit.
Un petit moteur oui, parce qu'il tourne à vitesse élevée pour compenser sa faible puissance. Un moteur avec un plus grand diamètre comme ceux embarqués sur un fauteuil électrique est inaudible. Normal pour une utilisation domestique.
Pour la tension qui varie, aucune idée.
Je dis ça juste pour éviter les remontées de tensions sur l'alimentation. On place souvent un résistance de puissance sur le circuit d'alimentation pour éviter ça.
Posté par
sur 30 avril 2017 - 11:39
dans
Servomoteurs, moteurs et autres actionneurs
Posté par
sur 05 mai 2017 - 09:02
dans
Servomoteurs, moteurs et autres actionneurs
je ne suis pas mécontent de mes débuts sur Arduino.
De nos jours, faut toujours avoir un p'tit arduino à portée de main 
Posté par
sur 08 mai 2017 - 05:14
dans
Robots roulants, chars à chenilles et autres machines sur roues
J’essaie de prendre le contrôle de Tad'col à distance via VPN mais la requête échoue. C'est normal ?
Peut-être la config du proxy...
Posté par
sur 20 mai 2017 - 10:19
dans
Domotique
Posté par
sur 08 mai 2017 - 07:39
dans
Mécanique
La Supermule, un chariot électrique pour déplacer une charge jusqu'à 120 kg, c'est sérieux ça.
http://www.concours-lepine.com/inventions/2017/129-collibault-joseph.html/
Posté par
sur 17 avril 2018 - 08:53
dans
Programmation
Dites-moi les enfants,
j'ai beau programmer (c'est mon métier) depuis XX années, connaitre les sujets techniques que vous abordez (les PIC, la radio, le numérique, l'analogique) - et quand je dis connaître c'est pratiquer - et je suis plutôt à l'aise pour parler technique (sauf Linux, c'est comme ça, chacun son truc)
Et bien voyez-vous j'ai un souci : je comprend pas tout. Que dalle en fait. Ça doit venir de moi ... C'est grave docteur ?
Posté par
sur 30 mars 2017 - 04:44
dans
Robots à pattes et jambes, humanoïdes, bipèdes, quadrupèdes, hexapodes ...
La société "Le garage d'Ulysse " propose : Moteur dunkermotoren GR 63X25, 24V et son réducteur 88851 (36:1)
Mais là on déplace une voiture ... 

Posté par
sur 27 avril 2017 - 07:57
dans
Robots à pattes et jambes, humanoïdes, bipèdes, quadrupèdes, hexapodes ...
En parlant de servo de cette taille, quelqu'un voit comment réaliser (surtout la matière) une articulation genre épaule ou hanche de cette taille ? J'ai bloqué sur le sujet quelques années en arrière pour réaliser un chat (taille tigre) . C'est bête mais c'est là que j'ai coincé et laissé tombé.
Edit : j'avais passé du temps à étudier le squelette, les muscles et la démarche. Mais la mécanique et moi...
Posté par
sur 29 mars 2017 - 11:17
dans
Robots à pattes et jambes, humanoïdes, bipèdes, quadrupèdes, hexapodes ...
Peut-être qu'il y a un moment où il faut faire les choses soi même.
Faisons un servo puissant, petit, léger, rapide, faible consommation et .............. pas cher
Tout à fait partant.
Posté par
sur 28 avril 2017 - 08:40
dans
Robots à pattes et jambes, humanoïdes, bipèdes, quadrupèdes, hexapodes ...
C'est ça que tu cherches à faire ?
Oui, très exactement, c'était avant l'apparition de BigDog . C'est un sujet sur lequel j'ai beauuuuuuuuucoup travaillé.
Tu aurais un exemple, par ce que "pan et tilt de caméra", je ne sais pas ce que c'est.
Sinon, il y a le couplage de 2 parallélogrammes en parallèle, (attention, pas un parallélépipède désarticulé), ça te parle ?
La structure et/ou l'articulation n'est pas "rotative", en actionnant des vérins on actionne les parallélogrammes.
Tu dois forcement connaitre, c'est le petit montage qui permet de grouper 2 servos pour diriger une caméra, ou bien sur les articulations sur les petits hexapodes. Mais ce qui fonctionne bien à petite échelle n'est plus valable à grande échelle. Par exemple (en exagérant volontairement) on ne peut pas reproduire un moustique géant simplement en multipliant l'échelle d'un petit. Dans mon cas à l'époque je n'ai pas réussi à créer une articulation sur ce principe. Et pourtant il y avait de la puissance ( peut-être même était-ce trop ! ). C'est ce qu'ont très bien réussi à faire les gens de Boston.
Le marché évoluant avec les besoins des amateurs et bidouilleurs, les servos d'aujourd'hui comme tu nous les présentes peuvent peut-être apporter une solution. Donc j'observe avec attention.
Posté par
sur 27 avril 2017 - 08:27
dans
Robots à pattes et jambes, humanoïdes, bipèdes, quadrupèdes, hexapodes ...
Posté par
sur 01 avril 2017 - 12:58
dans
Robots à pattes et jambes, humanoïdes, bipèdes, quadrupèdes, hexapodes ...
Je suis bluffé devant la puissance / rapidité / dimension de ce modèle. C'est un peu bruyant mais tant pis ça reste très bon. On peut réellement envisager de bien travailler avec ça.
Et comme c'est aussi valable pour un quadrupède, 'tention ça va finir par beaucoup me plaire ...
Posté par
sur 27 avril 2017 - 04:46
dans
Robots à pattes et jambes, humanoïdes, bipèdes, quadrupèdes, hexapodes ...
Posté par
sur 30 mars 2017 - 08:08
dans
Robots à pattes et jambes, humanoïdes, bipèdes, quadrupèdes, hexapodes ...
ça dépend de la qualité de ton potentiomètre... Mais normalement ça devrait ...
Il y a de tout : linéaire ou logarithmique, avec piste de carbone ou céramique, étanche, multi tours, simple, double, triple, avec interrupteur ...





