Salut et bienvenue 
Contenu de zavatha
Il y a 232 élément(s) pour zavatha (recherche limitée depuis 04-mai 13)
Par type de contenu
Voir pour ce membre
#112105 Nouvelle
 Posté par
sur 18 décembre 2020 - 09:46
dans
Et si vous vous présentiez?
Posté par
sur 18 décembre 2020 - 09:46
dans
Et si vous vous présentiez?
#112082 Vigibot Pi to multiple ESP32 WLAN Communications Example
Posté par
sur 16 décembre 2020 - 11:31
dans
Vigibot
hi firened,
i don't have analog runcam because of low costs constraints... so i turned back to espcam 32 (6$ only)
i agree : low latency streaming is a little bit deception with espcam 32 so for the moment i only make one POOC and i will see the effectivity of the system...
i didnt made serious mesures but i think i have 5fps, perhaps 10fps with correct resolution (not 320p)
it is not very good but sufficient for my usage...
but, in an other hand, i observed stability issues (freeze) while connected to my computer with a ftdi module... wait to see with dedicated power supply system.
i totaly agree with you and think a realist way is to use some fpv cams, associated to esp in order pilot the devices from the PI... like Pascal conception for vigibot... but don't have the funds 
have a good day
@+
Zav
#112080 Vigibot Pi to multiple ESP32 WLAN Communications Example
Posté par
sur 16 décembre 2020 - 10:59
dans
Vigibot
Salut à tous,
J'avais dans l'idée de d'utiliser vigibot pour contrôler un projet à base d'ESPCam 32...
Le but étant de streamer non pas la video de la cam du pi mais celle de l'ESP cam... quitte à utiliser le PI comme passerelle et que ce soit lui qui s'ovvupe de commuter à video à consulter à la demande... un vigibot dans vigibot en somme 
Je n'ai pas encore creusé... acr je n'ai le temps de rien, quasiment tous les projets sont en pause depuis 2 mois...
est-ce possible ?... en tout cas avec ce poste on s'en approche
L'idée serait de contrôler plusieurs devices lowcost constitués sur la même base et de passer de l'un à l'autre...
allez je balance un screenshot de la modélisation du projet en question (le proto du premier device), l'électronique est en cours d'assemblage / tests et le dev (V1) est fait à 90% :
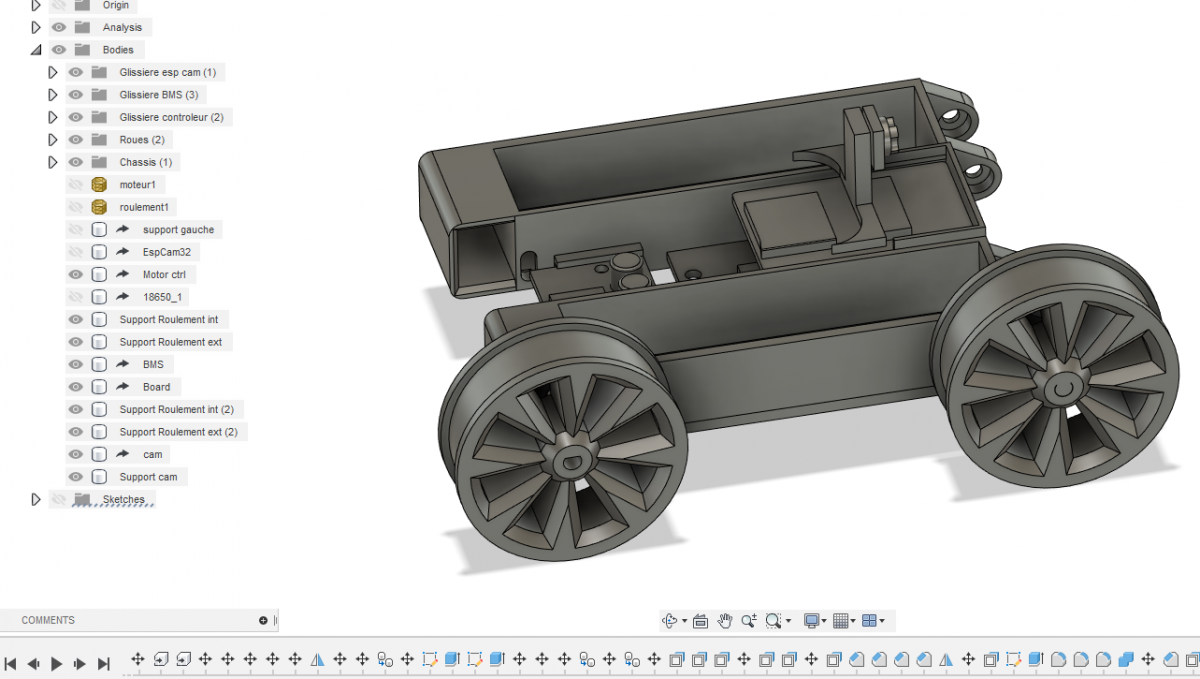
pour le moment, le device heberge un serveur web et est donc contrôlé en direct avec un smartphone...
@+
Zav
#111755 Bras de mesure 3D ? (mais en fait non, ça va pas le faire)
Posté par
sur 22 novembre 2020 - 02:14
dans
Bancs de tests et autres machines d'expérimentations
Bonjour,
je voulais juste attirer l'attention sur un point : la précision des encodeurs absolus ne suffit pas à déterminer la précision totale : il y a aussi :
- erreur des dimensions
- la flexibilité des pièces (je penses que c'est l'élément le plus problématique, car non calibrable)
- les jeux entre l'encodeur et la position du bras
Donc sur le principe c'est faisable, mais atteindre les 0.1mm de précision me semble difficile
du coup est ce qu'un système de laser qui se déplacerait autour de l'objet ne serait pas envisageable ? sur un système de rails par ex ou autre... bien sur ça dépend du type d'objet...
Zav
#111749 Bras de mesure 3D ? (mais en fait non, ça va pas le faire)
Posté par
sur 22 novembre 2020 - 10:25
dans
Bancs de tests et autres machines d'expérimentations
Je suis peut-être à coté de la plaque . . .
N'existe t-il pas des scanners 3D suffisamment précis pour ce genre de mesures ?
On scanne bien des cathédrales !
je ne sais pas ce que tu veux modéliser exactement mais as tu pensé à photogramétrie ? pas assez précis je suppose ?
et pour les cotes "internes" de l'objet ?
sinon projet sympa... je suis
Zav
#111726 Robot dessinateur type "polargraph" + arduino
Posté par
sur 21 novembre 2020 - 10:29
dans
Offres d'emplois et de stages , recherche de services ou d'associées
Bonjour,
As tu de l'argent ?

en tout ce n'est pas dans mes cordes en si peu de temps.
Bon courage pour ton projet qui a l'air sympa
Zav
#111685 Cherche mes 2 robots commandables à distance
Posté par
sur 14 novembre 2020 - 02:25
dans
Conseils et aide aux débutants, livres et kits en robotique
Salut,
Je laisse Mike et Pascal mais je pense que tu devrais trouver ton bonheur du côté de vigibot
@+
Zav
#111665 Fluburtur arrive
Posté par
sur 13 novembre 2020 - 01:28
dans
Et si vous vous présentiez?
ouep, bienvenue
y a qques fadas du code ici
#111664 Wheelson, robot a chenilles autonome?
Posté par
sur 13 novembre 2020 - 01:24
dans
Robots roulants, chars à chenilles et autres machines sur roues
En tout cas le coup des roues "suspendues" je suis fan, super idée...
J'avais eu l'idée d'un un truc y ressemblant, mais beaucoup plus compliqué, à base de ressorts.. un truc se rapprochant des roues de rovers martiens... et pour finir probablement pas réaliste 
Comme quoi la simplicité paie ! bravo.
PS : tu vas imprimer ces roues en PLA ?
Tu n'as pas pensé au petg ? plus souple (si je ne me trompe pas)
@+
Zav
#111655 Bonjour de jpbbricole
Posté par
sur 12 novembre 2020 - 05:00
dans
Et si vous vous présentiez?
Le "dévracage" est un sujet crucial aujourd'hui dans les thématiques de robotisation. Une fois la pièce isolée, les choses sont relativement faciles, positionnement, mesure, tri...
Les systèmes vibrants ne sont pas suffisants et ont des inconvénients (bruit par exemple)
Le problème des résistances en vrac à trier est leur déformation je suppose, pas facile.
Dans le même style j'ai une problématique de dévracage actuellement, vraiment complexe:
Le "dévracage" est un sujet crucial aujourd'hui dans les thématiques de robotisation. Une fois la pièce isolée, les choses sont relativement faciles, positionnement, mesure, tri...
Les systèmes vibrants ne sont pas suffisants et ont des inconvénients (bruit par exemple)
Le problème des résistances en vrac à trier est leur déformation je suppose, pas facile.
Dans le même style j'ai une problématique de dévracage actuellement, vraiment complexe:
ah la oui bon courage ^^
peut être avec une bonne caméra et un algo d'aprentissage pour la reconnaissance des ressorts, mais je vois déjà 2 inconvénients :
- lenteur de récupération des ressorts un par un à la pince
- complexité de l'image qui risque de perdre l'algo...
@+
Zav
#111654 Bonjour de jpbbricole
Posté par
sur 12 novembre 2020 - 04:57
dans
Et si vous vous présentiez?
Bonjour zavatha
Merci pour tout.
Oui, c'est un sujet en lui-même que l'acheminement des résistances. Celles que je dois trier sont encore toutes droites, ça facilite. Je vais d'abord faire la mesure, puis la saisie et, ensuite la dépose, dans cet ordre. Comme j'ai une imprimante 3D, ça facilite ce genre de montage.
J'ai regardé tes vidéos, la pelle hydraulique, super , même la fumée! J'ai été grutier, dans ma jeunesse, ça rappel des souvenirs!
Cordialement
jpbbricole
ah c'est toi mon viewer ^^
Pour la pelle je n'ai fait que la piece de remplacmeent, qui n'est pas parfaite mais publiée sur thingiverse car fonctionnelle !
Pour les vidéos j'ai levé le pied car peu de retours (coms ou likes) et au vu du temps passé pour les tourner / monter et du peu d'intérêt que ça sucite... et peu (pas) de production en termes de projets en ce moment...
@+
Zav
#111651 Bonjour de jpbbricole
Posté par
sur 12 novembre 2020 - 02:21
dans
Et si vous vous présentiez?
Bonjour et bien venue !!!
attraper les résistances dans une boite en vrac c compliqué je pense...
les donner une par une au robot c fastidieux...
ca serait cool de penser à un distributeur... mais la question est comment ?
avec un tube de diametre d'une resistance + 2mm de facon à ce qu'elles soient attrapées une par une par le robot : quand il en prend une, la suivante tombe, comme les canettes dans certains distributeurs ?
m le "distributeur" c un sujet en soit ^^
en tout cas projet sympa !
bien venue
#111646 Mesurer la hauteur d'un spéléo qui remonte sur corde/ asservissement en h...
Posté par
sur 12 novembre 2020 - 11:51
dans
Autres projets inclassables
Salut,
spontanément j'aurais pensé à un capteur de distance laser, placé à l'aplomb du grimpeur, qui f'ait défiler tant que la distance est inférieure à la distance dispositif de retenue / sol (en groas quand y a qqu'un) et qui ralenti / accélère le défilement quand la distance augmente / diminue...
est-ce que ça adresserait ton besoin ?
avantage : un capteur laser c surmeent moins cher qu'une cam ou rapsi + picam...
@+
Zav
#111543 Tracker de postion 3D, sans GPS et sans ondes electromagnétiques
Posté par
sur 30 octobre 2020 - 09:47
dans
Conseils et aide aux débutants, livres et kits en robotique
Est il possible d'avoir un peu plus de détail sur le besoin ?
" En effet, le système à localiser se situe à environ 1 mètres de l'objet que l'on souhaite mesurer ( un objet de plusieurs mètres carrés), "
J'ai l'impression que le "système à localiser " ressemble à un " scanner portatif 3D " ... qui " scan l'objet à mesurer ".
mais ensuite : "un système d'environ maximum 10x10 cm² pour un poids dépassant pas les 5 kg environ." à fixer sur le système à localiser me fait dire que c'est une contrainte bien lourde pour ce genre d'équipement....
Mieux comprendre la problématique permettrait sans doute de proposer de meilleurs solutions ...
+1
J'ai voulu tenter une réponse hier et je me suis ravisé car j'ai compris en la rédigeant que je ne n'avais rien compris au besoin justement ^^
avec si peu d'infos ça va être compliqué d'être pertinents là...
@+
Zav
#111539 Explorer130
Posté par
sur 28 octobre 2020 - 03:28
dans
Vigibot
C'est marrant ces phénomènes de convergence quand même... dans ma liste d'envie Ali j'ai ça :
https://fr.aliexpres...0310306761.html
et ça aussi :
https://fr.aliexpres...2945401875.html
je ne vais pas franchir le pas d'un 3ieme robot bien sûr, mais disons que c'est peut être pour plus tard... ou pour faire évoluer l'existant si besoin...
@+
Zav
#111441 Imprimante 3D résine - ELEGOO MARS
Posté par
sur 16 octobre 2020 - 09:42
dans
Impression 3D et Imprimantes 3D
De toute façon même si je recherche une bonne finition pour le couvercle de ma télécommande, ce ne sera pas avec de la résine, il faudrait que je rétrécisse sérieusement ma télécommande.
Yep !
J'ai fait des essais de collage avec des pièces en ABS et ça se passe plutôt bien :
Tu imprimes ta pièce en ABS en plusieurs parties. Puis tu fais ensuite un assemblage simplement en passant un peu d'acétone au pinceau sur les parties à coller, comme tu le ferais avec de la super glue :
ca donne des collages résistants, sans avoir à fixer avec des vis + insert ect... c'est comme si tu montais une maquette en somme...
Le problème que j'ai eu : temps d'impression longs car il faut réduire la vitesse si tu veux un bon rendu. (50mm/s)
je n'ai pas d'autobed levelling sur mon ender 3 donc qques défauts d'alignement entre certaines pièces quand elles sont grandes et ajourées. c'est probablement une histoire de réglage + pb de rétractation mal maîtrisé par moi (parfois la pièce se décolle du support et se déforme légèrement). l'ABS que j'ai utilisé pour ces essais est d'entrée de gamme, ça joue aussi, j'aurais surement eu de meilleurs résultats avec de l'ABS @atazone que je connaissais déjà un peu avant) mes pièces à moi sont fonctionnelles donc je ne cherche pas forcément à faire du beau alors ça ne me gêne pas donc je ne suis pas allé plus loin.
J'ai quand même envisagé un temps de combler les vides et défauts d'alignement avec du jus d'ABSappliqué au pinceau + ponçage derrière puis traitement aux vapeurs d'acétone pour une belle finition globale de la pièce, mais je n'ai pas tenté car le beau n'est pas une priorité et surtout faut de temps comme toujours...
si ça peut aider...
@+
zav
#111397 Imprimante 3D résine - ELEGOO MARS
Posté par
sur 12 octobre 2020 - 07:57
dans
Impression 3D et Imprimantes 3D
Pour des pièces Lego je suis confiant sur la précision d apres ce que j ai pu voir ça et la sur le net.... par contre coté solidité j ai un doute... oracid ? Ton avis ?
#111367 Mon robot d'exploration - Explora 85 - à l'abandon
Posté par
sur 07 octobre 2020 - 10:14
dans
Robots roulants, chars à chenilles et autres machines sur roues
En tout cas tu viens de gagner un abonné YT ^^
@+
#111355 Solution "toute prête" pour une navigation autonome (baé sur de tags)?
Posté par
sur 05 octobre 2020 - 04:22
dans
Programmation
Est-ce que le package Gmapping et les stack de navigation inclues dans ROS ne te suffisent pas ? Ça n'utilise que des capteurs embarqués (laser + odométrie), c'est plutôt éprouvé. En créant une carte en avance et avec une bonne odométrie, la localisation est plutôt bonne. En intérieur, j'ai eu de bons résultats.
+1
J'avais pansé spontanément à ROS qui est effectivement puissant à priori.
Si en plus tu peux placer qques tags pour "recaler" les dérives de ton odométrie doit y avoir moyen d'être assez précis non ?
#111315 Blabla divers
Posté par
sur 02 octobre 2020 - 10:59
dans
Bric-à-brac
@Levend : VSCD Free video editor ?
#111314 Mon robot d'exploration - Explora 85 - à l'abandon
Posté par
sur 02 octobre 2020 - 10:52
dans
Robots roulants, chars à chenilles et autres machines sur roues
Salut @Levend
Le mien n'avance pas plus vite que le tient... et pourtant on ne joue pas dans la même cour... il était censé être simple pourtant !
le premier demi chassis est imprimé mais il me manquait des vis pour terminer l'assemblage... que j'ai commandé et qui ont mis un certain temps à venir... c'est reçu, maintenant il faut trouver le temps de monter ça.
Au moment ou je te réponds je viens de terminer le montage d'une alim "de labo" à base de recup d'alim ATX... à tester demain si je trouve du temps...
Ensuite je ferais un test de chassis (avec moteur s'il vous plaît ^^) pour vérifier que les barbotins sont bien alignés et que la chaine ne déraille pas (ça ne te rappelle rien ? ^^). c'est la partie que je sens le moins dans l'affaire... si ça foire, je me poserais la question de l'abandon car le choix de l'impression 3d n'est peut être pas le bon ici... pas grave g progressé en fusion 360 avec ce projet, c'était un des objectifs...
de toute façon comme je t'avais dit : tant que j'ai pas une certitude que ça peut tenir la route, je ne poste pas sur robot maker...
une fois cela validé, impression du deuxième demi chassis et j'attaque la partie électronique + programmation (pour cette partie j'envisage l'utilisation de windows IOT que je ne connais pas du tout.... mais le principe du messaging de ROS me plaît bien, j'ai envie d'essayer... il me faut encore me documenter un peu avant d'arrêter un choix définitif)
J'ai toute l'électronique, mais il me reste à modéliser l'araignée qui va la supporter...
et comme je suis du genre dispersé, j'en ai commencé un second (robot), encore plus simple et encore plus low cost (par crédo mais aussi par contrainte malheureusement) :
lui est à base d'esp32Cam. Il doit être encore moins cher et surtout plus compact !.
et là même punition : j'attends des pièces commandées et qui vont mettre leur temps à venir (quand c'est gratuit c'est toi le produit, et quand c'est pas cher, les délais prennent cher ^^)
Pareil, quand je sens que ça vient, je poste (rien de sale, je vous rassure !!!) sur RM
LA modélisation est commencée mais pas finalisée, j'ai besoin des pièces manquantes...
Sur ce second robot, la partie de la programmation qui me parassait la plus "touchy" est faite. J'ai donc terminé 50-70% de la partie software... il risque donc sortir avant l'autre que j'ai pourtant commencé avant... la dispersion, la dispersion :\
Mais j'avoue qu'avec la rentrée et une nouvelle organisation à mettre en place, rien n'avance :\
@+
Zav
#111309 Mon robot d'exploration - Explora 85 - à l'abandon
Posté par
sur 02 octobre 2020 - 11:15
dans
Robots roulants, chars à chenilles et autres machines sur roues
Ça fait un petit moment que je suis ton projet et je voulais te féliciter pour ton travail, c'est juste impressionnant ! Reste déterminé ne lâche rien, je ne pense pas être le seul à vouloir voir ton projet se réaliser
.
C'est super inspirant de voir des projets aussi importants se concrétiser !
+1
aux ajustements de montage prêts il roule... c'est donc un pas en avant
Je suis pas sûr que perseverance ait fait ses premiers tours de roue au JPL avec ses moteurs non plus, et là tu vois, il est route pour Mars !
Continues comme ça... l'explo robotique j'y crois dur comme fer !!!
@+
Zav
#111069 Mon robot d'exploration - Explora 85 - à l'abandon
Posté par
sur 15 septembre 2020 - 08:56
dans
Robots roulants, chars à chenilles et autres machines sur roues
alors si je puis me permettre, dans ma courte vie de développeur j'ai pas vu beaucoup de projets finir dans les temps...
y a toujours des coucouilles et donc des retards... fin de l'été, début de l'automne... tant que ça sort, c'est que c'est bon
@+
Zav
#111010 Projet
Posté par
sur 09 septembre 2020 - 03:57
dans
Conseils et aide aux débutants, livres et kits en robotique
troisième question :
à quoi sert un tel post, à perdre ton temps à l'écrire et nous faire perdre le notre à le lire (enfin juste le début en ce qui me concerne)
@+
Zav
#110852 Mon nouvel UGV - Hercule - à l'abandon
Posté par
sur 19 août 2020 - 08:18
dans
Robots roulants, chars à chenilles et autres machines sur roues
Salut,
Ravi de voir que ça progresse... c'est du lourd !
Allez, je repars bricoler après 2.5 jours de coupure internet sur les 5 que j'avais pour ma robotique...
si c pas de la poisse c vraiment pas de bol !
@+
Zav




