Bonjour,
j'espère ne pas être hors sujet ..
J'ai terminé un petit projet complet concernant un montage pour piloter 8 servos a l'aide de potentiometres, avec affichage des valeurs 8bits pour chaque potar.
J'ai concu ce projet dans le but de pouvoir facilement piloter et tester les servos de mes chassis de robot en developpement.
Certains y trouveront peut etre une utilité, et le cas echeant, peut etre aussi de l'aide concernant la programmation des PIC en C.
L'ensemble du projet (schémas, explication, code C sous CC8E) se trouve sur cette page de mon, blog : http://blog.eihis.com/?p=76
En espérant que ça aide .. @ bientot !
Contenu de eihis
Il y a 63 élément(s) pour eihis (recherche limitée depuis 03-mai 13)
Par type de contenu
Voir pour ce membre
#17210 Piloter 8 servos par potentiometres ( pic18f452)
 Posté par
sur 09 juillet 2010 - 11:54
dans
Electronique
Posté par
sur 09 juillet 2010 - 11:54
dans
Electronique
#16989 pic+capteur
Posté par
sur 02 juillet 2010 - 04:44
dans
Electronique
bonjour,
j'ai l'habitude d'utiliser un pic 18f452 : la prog. est simplifiee (disparition quasi totale de l'utilisation des 'ram bank select' du 16f84).
pour le langage, a moins d'avoir besoin de timings hyper précis, je te conseille le langage C plutot que l'assembleur. ( CC8E est gratuit et très efficace, bien que la limitation a un seul fichier (pas de linker dans la version gratuite) puisse dérouter les fanas des trucs 'carrés').Les mots cles reservés permettent de configurer très facilement chaque registre systeme en se référant a la doc officielle de microchip.
Niveau capteurs, comme sur bcp de microcontroleurs tu disposera de ports configurables tels que tu le veux : entrée ou sortie, avec pull-ups ou pas ..
pour les capteurs, toujours,le 18F452 propose un convertisseur a/d 10bits facilement utilisable ( mais attention , les 6 canaux analogiques proposés ne sont utilisables qu'un a la fois : si tu souhaite commuter plusieurs capteurs en entree du convertisseur, très peu de logique externe suffira ( un mux analogique cmos par exemple) dans le cas ou ces canaux seraient déja utilisés pour d'autres fonctions.
la gestion des servos se fait sans probleme (tu as 4 timers configurables sur ce pic)
niveau 'flashage', ce pic peut etre programmé en LV-ICP (low voltage in-circuit programming) : 4 broches sont nécéssaire. plusieurs schémas de programmateur a brancher sur le port parallèle du pc sont disponibles sur internet, tout comme plusieurs logiciels capables de piloter ces programmateurs : moindre cout, et en plus, ça marche !.
@+
j'ai l'habitude d'utiliser un pic 18f452 : la prog. est simplifiee (disparition quasi totale de l'utilisation des 'ram bank select' du 16f84).
pour le langage, a moins d'avoir besoin de timings hyper précis, je te conseille le langage C plutot que l'assembleur. ( CC8E est gratuit et très efficace, bien que la limitation a un seul fichier (pas de linker dans la version gratuite) puisse dérouter les fanas des trucs 'carrés').Les mots cles reservés permettent de configurer très facilement chaque registre systeme en se référant a la doc officielle de microchip.
Niveau capteurs, comme sur bcp de microcontroleurs tu disposera de ports configurables tels que tu le veux : entrée ou sortie, avec pull-ups ou pas ..
pour les capteurs, toujours,le 18F452 propose un convertisseur a/d 10bits facilement utilisable ( mais attention , les 6 canaux analogiques proposés ne sont utilisables qu'un a la fois : si tu souhaite commuter plusieurs capteurs en entree du convertisseur, très peu de logique externe suffira ( un mux analogique cmos par exemple) dans le cas ou ces canaux seraient déja utilisés pour d'autres fonctions.
la gestion des servos se fait sans probleme (tu as 4 timers configurables sur ce pic)
niveau 'flashage', ce pic peut etre programmé en LV-ICP (low voltage in-circuit programming) : 4 broches sont nécéssaire. plusieurs schémas de programmateur a brancher sur le port parallèle du pc sont disponibles sur internet, tout comme plusieurs logiciels capables de piloter ces programmateurs : moindre cout, et en plus, ça marche !.
@+
#14849 Modélisation de nos robots
Posté par
sur 07 mars 2010 - 07:58
dans
Mécanique
Bonjour,
pour simuler les articulations et bien d'autres choses, en 2d , j'utilise PHUN , qui est pratique, rapide a maitriser, et gratuit.
evidemment, c'est de la 2d , mais la plupart des modeles mécaniques sont simulables aisement, la ou d'autres logiciels te demandent bcp de parametres.
Phun permet de modéliser rapidement une idée, et de la tester. c un logiciel que j'utilise énormément. il gère les gravité, les effets d'aimantations entre matériaux etc...
@+
pour simuler les articulations et bien d'autres choses, en 2d , j'utilise PHUN , qui est pratique, rapide a maitriser, et gratuit.
evidemment, c'est de la 2d , mais la plupart des modeles mécaniques sont simulables aisement, la ou d'autres logiciels te demandent bcp de parametres.
Phun permet de modéliser rapidement une idée, et de la tester. c un logiciel que j'utilise énormément. il gère les gravité, les effets d'aimantations entre matériaux etc...
@+
#14848 Mélangeur Trichrome
Posté par
sur 07 mars 2010 - 07:53
dans
Electronique
hello
si on se base sur la question originale ,en 'electronique a papa', je ferais plutot le truc suivant:
bouton poussoir pour incrémenter un compteur (exemple : un compteur 4bits te donnera 16 'gradations' par led
sorties du compteur (binaire) convertie avec un CNA de base ( résistances avec valeurs puissances de 2..)
et attaque d'un transistor avec ce signal converti pour moduler le courant dans la la led.
@+
si on se base sur la question originale ,en 'electronique a papa', je ferais plutot le truc suivant:
bouton poussoir pour incrémenter un compteur (exemple : un compteur 4bits te donnera 16 'gradations' par led
sorties du compteur (binaire) convertie avec un CNA de base ( résistances avec valeurs puissances de 2..)
et attaque d'un transistor avec ce signal converti pour moduler le courant dans la la led.
@+
#13703 demande d'aide
Posté par
sur 03 janvier 2010 - 10:06
dans
Electronique
je pense que c'est un grille-pains.
a moins que ca ne soit un detecteur a phototransistor(photodiode?) avec ampli aop , a toi de voir.
a moins que ca ne soit un detecteur a phototransistor(photodiode?) avec ampli aop , a toi de voir.
#13585 mon "premier" robot
Posté par
sur 16 décembre 2009 - 10:13
dans
Robots mixtes / hybride
hello léon !
je comprends bien ton interrogation. mon probleme, c'est que j'ai tendance a aller jusqu'au fond des choses.
avec l'araignée a 6 pattes, j'avais un chassis de + de 700grammes, comportant 12 seervos , et un PIC dédié au pilotage du tout.
avec le nouveau proto, j'ai un chassis qui pese actuellement 385 grammes , comportant 1 seul moteur , ne necessitant qu'un pont en H pour le controller..
Ok , il n'y a pas de direction du chassis actuellement, et les mouvements sont dictés par la mécanique des pattes. mais il me semble que cette solution est la plus proche de celle que je cherche pour obtenir un chassis de robot a bas prix, robuste et économe en energie, capable de se déplacer rapidement de facon stable.
La solution pour réduire la consommation sur le 'spider' a 6 pattes, c'etait d'augmenter le couple des servos.Mais on connait le principe -> " plus d'euros = plus de puissance (et parfois en plus, moins de vitesse)".
-> " plus d'euros = plus de puissance (et parfois en plus, moins de vitesse)".
Bien sur, sinon, je peux aussi acheter un kit complet comme celui vu ici : || http://www.robot-maker.com/forum/topic/3095-mon-petit-robot-hexapode/ || ( c'est d'ailleur une des raison pour laquelle j'ai arreté le projet quand j'ai vu la qualité du kit )
Mais ca n'est pas ma philosophie.
Sur le chassis a 4 pattes, le moteur a reducteur 30:1 a couté dans les 12euros. reste une couronne a '90°' en plastique et un pignon dégoté sur un vieux moteur de magnetoscope.
Le reste, c'est du temps en découpage , poncage, percage du plexiglass, et quelque vis de 3mm . bref le tout reste accessible a un amateur sans trop de frais puisque dans l'état actuel , ce 'proto' coute dans les 25 euros tout compris.
Je suis en train de réfléchir a une solution pour les changements de direction, et d'amortissement pour l'augmentation de la vitesse de marche.
L'electronique ne me rebute pas, bien entendu, mais je pense qu'elle doit etre dédiée au systeme de gestion ( 'cerveau') du robot, plutot qu'a des taches qui peuvent etre gérées par des solutions simples et moins couteuses ( sur le spider 6 , un PIC complet devait etre dédié a la gestion des signaux de commande servos ! ).
Finallement, disons que je suis assez proche de la philosophie des robots 'B.E.A.M'
Si une patte est capable de faire le mouvement 'avant' ou 'arriere' par un unique montage mécanique, alors je suis satisfait.
Notre bras ne fait pas ce que notre jambe fait : sur ce robot, c'est la même chose, et une mécanique de jambe telle que celle de theo jansen remplit exactement (mais uniquement) le role pour lequel elle a été developpée.
Or, si nous courrrons sur nos jambes en non pas sur nos bras, c'est bel et bien parcque nos jambes sont plus efficaces, et mieux adaptées pour la course que nos bras.
Evidemment, la souplesse s'en trouve amputée, mais en fin de compte je me demande si 'la souplesse' existait vraiment : dans le cas du chassis a 6 pattes, a part un mouvement de marche, de contraction ou d'extension et quelque figures de style inutiles, rien ne justifie le nombre de servos et la consommation de l'ensemble.
enfin, c'est tout un débat j'imagine, car tout le monde a sa conception .
en tout cas merci pour ta réponse, et @ bientot !
je comprends bien ton interrogation. mon probleme, c'est que j'ai tendance a aller jusqu'au fond des choses.
avec l'araignée a 6 pattes, j'avais un chassis de + de 700grammes, comportant 12 seervos , et un PIC dédié au pilotage du tout.
avec le nouveau proto, j'ai un chassis qui pese actuellement 385 grammes , comportant 1 seul moteur , ne necessitant qu'un pont en H pour le controller..
Ok , il n'y a pas de direction du chassis actuellement, et les mouvements sont dictés par la mécanique des pattes. mais il me semble que cette solution est la plus proche de celle que je cherche pour obtenir un chassis de robot a bas prix, robuste et économe en energie, capable de se déplacer rapidement de facon stable.
La solution pour réduire la consommation sur le 'spider' a 6 pattes, c'etait d'augmenter le couple des servos.Mais on connait le principe
-> " plus d'euros = plus de puissance (et parfois en plus, moins de vitesse)".Bien sur, sinon, je peux aussi acheter un kit complet comme celui vu ici : || http://www.robot-maker.com/forum/topic/3095-mon-petit-robot-hexapode/ || ( c'est d'ailleur une des raison pour laquelle j'ai arreté le projet quand j'ai vu la qualité du kit )
Mais ca n'est pas ma philosophie.
Sur le chassis a 4 pattes, le moteur a reducteur 30:1 a couté dans les 12euros. reste une couronne a '90°' en plastique et un pignon dégoté sur un vieux moteur de magnetoscope.
Le reste, c'est du temps en découpage , poncage, percage du plexiglass, et quelque vis de 3mm . bref le tout reste accessible a un amateur sans trop de frais puisque dans l'état actuel , ce 'proto' coute dans les 25 euros tout compris.
Je suis en train de réfléchir a une solution pour les changements de direction, et d'amortissement pour l'augmentation de la vitesse de marche.
L'electronique ne me rebute pas, bien entendu, mais je pense qu'elle doit etre dédiée au systeme de gestion ( 'cerveau') du robot, plutot qu'a des taches qui peuvent etre gérées par des solutions simples et moins couteuses ( sur le spider 6 , un PIC complet devait etre dédié a la gestion des signaux de commande servos ! ).
Finallement, disons que je suis assez proche de la philosophie des robots 'B.E.A.M'
Si une patte est capable de faire le mouvement 'avant' ou 'arriere' par un unique montage mécanique, alors je suis satisfait.
Notre bras ne fait pas ce que notre jambe fait : sur ce robot, c'est la même chose, et une mécanique de jambe telle que celle de theo jansen remplit exactement (mais uniquement) le role pour lequel elle a été developpée.
Or, si nous courrrons sur nos jambes en non pas sur nos bras, c'est bel et bien parcque nos jambes sont plus efficaces, et mieux adaptées pour la course que nos bras.
Evidemment, la souplesse s'en trouve amputée, mais en fin de compte je me demande si 'la souplesse' existait vraiment : dans le cas du chassis a 6 pattes, a part un mouvement de marche, de contraction ou d'extension et quelque figures de style inutiles, rien ne justifie le nombre de servos et la consommation de l'ensemble.
enfin, c'est tout un débat j'imagine, car tout le monde a sa conception .
en tout cas merci pour ta réponse, et @ bientot !
#13581 mon "premier" robot
Posté par
sur 15 décembre 2009 - 06:53
dans
Robots mixtes / hybride
Re bonjour !
Je passe pour poster une petite video visible ici : http://blog.eihis.com/wp-content/uploads/2009/12/4legs_proto_part3.wmv
l'engin , a 4 pattes, pèse 425grammes et consomme 200mA sous 9V avec un unique moteur ( autant dire que comparé a mon six pattes 'bouffeur' de watts... ça confirme mon idée de base qu'il vaut mieux etudier une mécanique pointue pour les mouvements, et limiter ainsi le nombre de moteurs sur un robot )
@+
Je passe pour poster une petite video visible ici : http://blog.eihis.com/wp-content/uploads/2009/12/4legs_proto_part3.wmv
l'engin , a 4 pattes, pèse 425grammes et consomme 200mA sous 9V avec un unique moteur ( autant dire que comparé a mon six pattes 'bouffeur' de watts... ça confirme mon idée de base qu'il vaut mieux etudier une mécanique pointue pour les mouvements, et limiter ainsi le nombre de moteurs sur un robot )
@+
#13579 Drone volant d'intérieur
Posté par
sur 14 décembre 2009 - 11:46
dans
Drone, Robot volant, et autres machines volantes
si jamais tu ne le connaissais pas, jean louis naudin en a quelques uns fabriqués maison , dont certain visibles sur son site : http://jnaudin.free.fr/ , par exemple celui ci :
http://jnaudin.free.fr/uav/qro/index.htm
ou encore celui la :
http://jnaudin.free.fr/uav/xufo/index.htm
... j'ai lu sur le site de Jean-P Petit,il y'a quelque temps, qu'il a été approché par la police ou l'armée (me rapelle plus) rapport a l'efficacité de ses réalisations ....
http://jnaudin.free.fr/uav/qro/index.htm
ou encore celui la :
http://jnaudin.free.fr/uav/xufo/index.htm
... j'ai lu sur le site de Jean-P Petit,il y'a quelque temps, qu'il a été approché par la police ou l'armée (me rapelle plus) rapport a l'efficacité de ses réalisations ....
#13578 mon "premier" robot
Posté par
sur 13 décembre 2009 - 04:56
dans
Robots mixtes / hybride
Après quelque temps passés a chercher et tester diverses possibilités pour un mouvement 'a pattes' économe, je me suis arreté sur la mécanique de Theo Jansen.
Je dois dire que les premiers résultats sont hyper encourageants, en terme de consommation d'energie,de robustesse, et de rapidité.
J'ai pondu un article complet sur un prototype (et c'est vraiment un proto !) de chassis a 4 jambes 'Jansen' avec un moteur modelcraft a reducteur 30:1, visible sur mon blog ( photos , et videos [ augmenter la luminosité sur les videos dans le player windows média ] )
http://blog.eihis.com/?p=43
commentaires bienvenus.
Je vais plancher maintenant sur une version 'chiadée' et améliorer la souplesse des appuis. @ bientot !
Je dois dire que les premiers résultats sont hyper encourageants, en terme de consommation d'energie,de robustesse, et de rapidité.
J'ai pondu un article complet sur un prototype (et c'est vraiment un proto !) de chassis a 4 jambes 'Jansen' avec un moteur modelcraft a reducteur 30:1, visible sur mon blog ( photos , et videos [ augmenter la luminosité sur les videos dans le player windows média ] )
http://blog.eihis.com/?p=43
commentaires bienvenus.
Je vais plancher maintenant sur une version 'chiadée' et améliorer la souplesse des appuis. @ bientot !
#13226 mon "premier" robot
Posté par
sur 21 septembre 2009 - 12:13
dans
Robots mixtes / hybride
yo Léon, merci pour ces idées !
voila un petit résumé de l'avancement :
j'ai fait une premiere modif des pattes avec une bielette pour demultiplier, en passant le servo a un rapport grosso modo de 2:1 .
Mais il m'a fallu quelque temps avant de trouver la visserie plastique obligatoire, car cette modif alourdissait trop la patte, si l'on comparait le 'gain' de poids avec le gain en puissance.
J'ai enfin trouvé ces vis, ce qui va me permettre de passer de 10g (poids d'une vis) + 6g (poids d'une bielette plastique + sa visserie) = 16g au total , a environ 9 grammes , par patte.
En effet le surpoids de la modif agit négativement sur le chassis + l'axe des servos 'horizontaux' qui n'est pas doublé. il me faut donc compenser le poids de la modif.
La chasse aux kilos étant terminée puisque j'ai trouvé mes vis plastiques, il me reste a réorganiser la patte.
en fait, je vais compenser plus encore le surpoids en recentrant la masse de la patte.
actuellement, le poids du servo 'vertical' se trouve 'portant' sur l'extremite, et ca pese sur l'axe du servo 'horizontal', quand la patte est en position 'relevée'.
Je vais donc repositioner ce servo vertical au dessus du servo horizontal, plus proche de l'axe, pour limiter l'effet de levier.
la physionomie de la bete s'en trouvera modifiée : les pattes vont devenir plus fines et legeres, avec un centre de gravité regroupé.
Ceci vient en accord avec mon constat suite aux premiers essais : utiliser 6 pattes = 12servos consomme beaucoup, pour une efficience finallement assez mauvaise (autant utiliser des roues pour se déplacer).
D'autant plus qu'actuellement, la 'garde au sol' de l'engin est tellement faible ( pas plus de 3cm) que les pattes n'apportent aucun avantage comparé a des roues, dans le cas d'un franchissement d'obstacle.
Le fait de rallonger et affiner les pattes devrait en partie améliorer ces points qui me chagrinent.
Du coté electronique, un dilemme s'impose.
j'ai noirci des kilos de papier et l'un dans l'autre, en calculant et recalculant (cout des circuits) , je pense que je vais finallement dédier le pic18f452 a la tache unique de controle des 16 servos + l'acquisition des signaux entrant ( CA/N + décodage ) , en le dotant d'un port E/S acceptant un ensemble de commandes.
L'un dans l'autre, le pic + 1 quartz + 2capas coutera toujours moins cher que n'importe quel montage avec CIs pour gerer le pwm de 16 servos.
En fait, le pic se comportera comme un élément esclave, répondant a un ensemble de commandes envoyées par le systeme 'logique' de la bete : une sorte de centre d'E/S piloté par des commandes simples :"avancer X pas, reculer X pas, tourner X degrés ,Lecture ANA CHAN-n°X ,Reinit etc ".
Ca oblige a refondre la carte de controle , pour ne garder que le MUX 16->1 analogique pour le CA/N ( le pic possede 8 entrées A/N , mais 7 d'entre elles seront déja utilisées pour d'autre taches, en mode logique), mais ca simplifiera la tache pour le centre 'logique' futur, qui n'aura qu'un set de commance réduit mais puissant a disposition ( gain de mémoire et facilité de programmation)
Voila ou j'en suis !
Dans 4 jours je pars en tunisie 1 semaines , je l'ai mérité (lol) - ca va faire un break dans mon squatt du forum.
@bientot !
voila un petit résumé de l'avancement :
j'ai fait une premiere modif des pattes avec une bielette pour demultiplier, en passant le servo a un rapport grosso modo de 2:1 .
Mais il m'a fallu quelque temps avant de trouver la visserie plastique obligatoire, car cette modif alourdissait trop la patte, si l'on comparait le 'gain' de poids avec le gain en puissance.
J'ai enfin trouvé ces vis, ce qui va me permettre de passer de 10g (poids d'une vis) + 6g (poids d'une bielette plastique + sa visserie) = 16g au total , a environ 9 grammes , par patte.
En effet le surpoids de la modif agit négativement sur le chassis + l'axe des servos 'horizontaux' qui n'est pas doublé. il me faut donc compenser le poids de la modif.
La chasse aux kilos étant terminée puisque j'ai trouvé mes vis plastiques, il me reste a réorganiser la patte.
en fait, je vais compenser plus encore le surpoids en recentrant la masse de la patte.
actuellement, le poids du servo 'vertical' se trouve 'portant' sur l'extremite, et ca pese sur l'axe du servo 'horizontal', quand la patte est en position 'relevée'.
Je vais donc repositioner ce servo vertical au dessus du servo horizontal, plus proche de l'axe, pour limiter l'effet de levier.
la physionomie de la bete s'en trouvera modifiée : les pattes vont devenir plus fines et legeres, avec un centre de gravité regroupé.
Ceci vient en accord avec mon constat suite aux premiers essais : utiliser 6 pattes = 12servos consomme beaucoup, pour une efficience finallement assez mauvaise (autant utiliser des roues pour se déplacer).
D'autant plus qu'actuellement, la 'garde au sol' de l'engin est tellement faible ( pas plus de 3cm) que les pattes n'apportent aucun avantage comparé a des roues, dans le cas d'un franchissement d'obstacle.
Le fait de rallonger et affiner les pattes devrait en partie améliorer ces points qui me chagrinent.
Du coté electronique, un dilemme s'impose.
j'ai noirci des kilos de papier et l'un dans l'autre, en calculant et recalculant (cout des circuits) , je pense que je vais finallement dédier le pic18f452 a la tache unique de controle des 16 servos + l'acquisition des signaux entrant ( CA/N + décodage ) , en le dotant d'un port E/S acceptant un ensemble de commandes.
L'un dans l'autre, le pic + 1 quartz + 2capas coutera toujours moins cher que n'importe quel montage avec CIs pour gerer le pwm de 16 servos.
En fait, le pic se comportera comme un élément esclave, répondant a un ensemble de commandes envoyées par le systeme 'logique' de la bete : une sorte de centre d'E/S piloté par des commandes simples :"avancer X pas, reculer X pas, tourner X degrés ,Lecture ANA CHAN-n°X ,Reinit etc ".
Ca oblige a refondre la carte de controle , pour ne garder que le MUX 16->1 analogique pour le CA/N ( le pic possede 8 entrées A/N , mais 7 d'entre elles seront déja utilisées pour d'autre taches, en mode logique), mais ca simplifiera la tache pour le centre 'logique' futur, qui n'aura qu'un set de commance réduit mais puissant a disposition ( gain de mémoire et facilité de programmation)
Voila ou j'en suis !
Dans 4 jours je pars en tunisie 1 semaines , je l'ai mérité (lol) - ca va faire un break dans mon squatt du forum.
@bientot !
#13204 Logiciel pour Circuits Imprimés
Posté par
sur 13 septembre 2009 - 12:57
dans
Electronique
héhé !
ok pour les rotations exotiques, mais je ne parlais pas d'un plan de masse : il s'agit plutot d'une gravure telle que celle que font les fraises pour cicuits imprimés : on ne retire QUE le cuivre inutile pour séparer 2 zones ( une piste avec l'autre).
je vais jeter un oeil a tout ça pour mon prochain circuit !
merci pour tes infos
@+
ok pour les rotations exotiques, mais je ne parlais pas d'un plan de masse : il s'agit plutot d'une gravure telle que celle que font les fraises pour cicuits imprimés : on ne retire QUE le cuivre inutile pour séparer 2 zones ( une piste avec l'autre).
je vais jeter un oeil a tout ça pour mon prochain circuit !
merci pour tes infos
@+
#13203 mon "premier" robot
Posté par
sur 13 septembre 2009 - 12:47
dans
Robots mixtes / hybride
@Leon : Ok impecc,merci pour les datasheets - c'est d'autant plus cool que ma carte pourra du coup servir avec des servos modifiés ou pas, de n'importe quelle 'marque', a priori !
@inounx :
Pour la séquence de marche qui est visible dans la video, il y'a un pas 'pourri' ou les 3 pattes formant le triangle 'groupe 1' descendent pendant que les 3 autres opposées montent (groupe 2).
c'est une étape qui n'est pas correcte, j'aurais du décaler les sequences du 1er groupe et du 2ème dans le temps, de manière a ce que 3 pattes (donc un groupe) soient en permanence en contact avec le sol.
Mais a la manière dont j'ai programmé les sequences en assembleur, ca n'etait pas possible : j'ai fait le truc vite fait, pour voir si en gros, ca marchait.
En fait j'hésite encore entre une programmation bete et méchante , c'est a dire a chaque étape, un tableau stockant les valeurs de position pour chacun des 12servos, et une programmation plus proche du 'bio', en liant chaque element a l'autre par une suite logique ( tel commande sur tel element entraine une reaction + tel commande sur tel autre .., 'a la maniere des pattes d'un mille patte..')
Pour ce qui est de la force sur les servos,j'ai moi aussi fait ton calcul : le poids total sur 3 pieds = poids/3 a gerer pour un servo, mais ca n'est au final pas si simple : quand tu es en appui sur les 2 pattes gauches, et celle du milieu droite, par exemple, tu te retrouve avec deux pattes pour supporter d'un cote, et une seule de l'autre : du coup, la patte droite, seule, doit 'lever' le poids de la patte droite avant + droite arriere (cad son coté)+ 1/3 de la masse des cartes+platine. a l'opposé, les 2 pattes n'ont qu'a 'lever' 1 patte , celle du milieu gauche , +1/3 de la masse cartes+platine.
tout se passe bien tant que tu ne fais pas aller trop a l'horizontale le bout de la patte (question de vecteurs de force, of course..), mais dès que la fameuse patte seule prends un peu de retard (parcequ'elle 'force' plus), l'ensemble se déséquilibre, et de plus en plus de poids se retrouve sur elle.... et a l'arrivée, ce servo force bcp plus que les 2 autres a l'opposé.Le montage approximatif 'en hauteur' défavorise encore plus l'equilibrage et accélère l'apparition du phénomeme.
D'ou la modif que j'envisage , de manière a avoir une araignée sure de ses mouvements.
En fait, en laissant les pattes dans l'état actuel, je ne pourrais pas , non plus, faire d'autres essais de locomotion (par exemple, sur 4 pattes en utilisant les 2 autres comme equilibreurs, a la maniere d'une tete+ queue de lézard, ou encore marcher de traver, comme un crabe), par faute de puissance disponible et nécéssaire sur ces pattes.
Le glissement a été résolu par l'ajout de mini patins en caoutchouc collés aux extrémités des pattes et cette partie n'a pas posé de problemes.
@inounx :
Pour la séquence de marche qui est visible dans la video, il y'a un pas 'pourri' ou les 3 pattes formant le triangle 'groupe 1' descendent pendant que les 3 autres opposées montent (groupe 2).
c'est une étape qui n'est pas correcte, j'aurais du décaler les sequences du 1er groupe et du 2ème dans le temps, de manière a ce que 3 pattes (donc un groupe) soient en permanence en contact avec le sol.
Mais a la manière dont j'ai programmé les sequences en assembleur, ca n'etait pas possible : j'ai fait le truc vite fait, pour voir si en gros, ca marchait.
En fait j'hésite encore entre une programmation bete et méchante , c'est a dire a chaque étape, un tableau stockant les valeurs de position pour chacun des 12servos, et une programmation plus proche du 'bio', en liant chaque element a l'autre par une suite logique ( tel commande sur tel element entraine une reaction + tel commande sur tel autre .., 'a la maniere des pattes d'un mille patte..')
Pour ce qui est de la force sur les servos,j'ai moi aussi fait ton calcul : le poids total sur 3 pieds = poids/3 a gerer pour un servo, mais ca n'est au final pas si simple : quand tu es en appui sur les 2 pattes gauches, et celle du milieu droite, par exemple, tu te retrouve avec deux pattes pour supporter d'un cote, et une seule de l'autre : du coup, la patte droite, seule, doit 'lever' le poids de la patte droite avant + droite arriere (cad son coté)+ 1/3 de la masse des cartes+platine. a l'opposé, les 2 pattes n'ont qu'a 'lever' 1 patte , celle du milieu gauche , +1/3 de la masse cartes+platine.
tout se passe bien tant que tu ne fais pas aller trop a l'horizontale le bout de la patte (question de vecteurs de force, of course..), mais dès que la fameuse patte seule prends un peu de retard (parcequ'elle 'force' plus), l'ensemble se déséquilibre, et de plus en plus de poids se retrouve sur elle.... et a l'arrivée, ce servo force bcp plus que les 2 autres a l'opposé.Le montage approximatif 'en hauteur' défavorise encore plus l'equilibrage et accélère l'apparition du phénomeme.
D'ou la modif que j'envisage , de manière a avoir une araignée sure de ses mouvements.
En fait, en laissant les pattes dans l'état actuel, je ne pourrais pas , non plus, faire d'autres essais de locomotion (par exemple, sur 4 pattes en utilisant les 2 autres comme equilibreurs, a la maniere d'une tete+ queue de lézard, ou encore marcher de traver, comme un crabe), par faute de puissance disponible et nécéssaire sur ces pattes.
Le glissement a été résolu par l'ajout de mini patins en caoutchouc collés aux extrémités des pattes et cette partie n'a pas posé de problemes.
#13194 mon "premier" robot
Posté par
sur 12 septembre 2009 - 04:39
dans
Robots mixtes / hybride
kikou tout le monde .
Bon, après quelques essais, et une nuit a réfléchir sur le sujet, je vais faire une assez grosse modif, concernant la mécanique.
En effet, il s'avère que question puissance, l'ensemble ne me satisfait pas.
je m'explique :
chaque servo 'déplace' dans les 37N/cm , sur un débattement de 180°
hors , en fait, dans l'état actuel, je n'utilise que 30 a 60° maximum du débatement, pour les avant bras comme pour les extrémités :
ca a deux conséquences :
1- baisse de la résolution (angle minimum) , quand on programme (je 'fous en l'air' dans les 2/3 de la résolution (pwm) a la poubelle )
2- je fous a la poubelle de la puissance : mieux vaudrait utiliser les 180° de mouvement par un effet de levier.
-> la grosse modif va donc consister a changer le montage méca des extrémités de bras (->effet de levier) pour obtenir que le mouvement de 180° du servo fasse tourner le bras de 60° maxi : je devrais ainsi gagner en puissance sur les 6 bras , puisque utilisant un rapport 1:3
les bras qui font les rotations dans le plan perpendiculaire a la gravité ('avant bras') sont eux aussi sous employés, mais pour l'instant ils ne posent pas de probleme niveau puissance (mais ca pourrait changer avec le pack d'accus sur le dos ) et suffisent a faire translater la masse du robot vers la direction voulue.
Voila pour la mécanique.
niveau electronique, j'ai fais des mesures a l'interieur des servos Modelcraft (petit parenthèse pour Léon), en vue de les modifier pour avoir un retour d'info sur leur position vers le PIC (CA/N) :
En sortie du potar d'asservissement, on trouve une tension variant de 0.5V a 2V , en fonction de la position servo : 0° / 180° , alimenté sous 5V régulés (je n'ai pas encore testé en non régulé..mais ya peut etre une zener planquée sur la carte du servo ... ca serait une bonne nouvelle )
Leon, si tu as l'occasion, pourrais tu mesurer ca sur d'autres servos tels que les tiens ? j'aurais aimé savoir s'il y'a en quelque sorte un 'standard' dans ces mesures, d'un servo a l'autre.
Ma prochaine étape electronique est le branchement du clavier et de l'afficheur d'état + interfacage avec le PIC qui doit gérer tout ça !
bref j'ai du pain sur la planche,
@bientot ! et merci pour vos encouragements, vos commentaires et vos conseils :=)
Bon, après quelques essais, et une nuit a réfléchir sur le sujet, je vais faire une assez grosse modif, concernant la mécanique.
En effet, il s'avère que question puissance, l'ensemble ne me satisfait pas.
je m'explique :
chaque servo 'déplace' dans les 37N/cm , sur un débattement de 180°
hors , en fait, dans l'état actuel, je n'utilise que 30 a 60° maximum du débatement, pour les avant bras comme pour les extrémités :
ca a deux conséquences :
1- baisse de la résolution (angle minimum) , quand on programme (je 'fous en l'air' dans les 2/3 de la résolution (pwm) a la poubelle )
2- je fous a la poubelle de la puissance : mieux vaudrait utiliser les 180° de mouvement par un effet de levier.
-> la grosse modif va donc consister a changer le montage méca des extrémités de bras (->effet de levier) pour obtenir que le mouvement de 180° du servo fasse tourner le bras de 60° maxi : je devrais ainsi gagner en puissance sur les 6 bras , puisque utilisant un rapport 1:3
les bras qui font les rotations dans le plan perpendiculaire a la gravité ('avant bras') sont eux aussi sous employés, mais pour l'instant ils ne posent pas de probleme niveau puissance (mais ca pourrait changer avec le pack d'accus sur le dos ) et suffisent a faire translater la masse du robot vers la direction voulue.
Voila pour la mécanique.
niveau electronique, j'ai fais des mesures a l'interieur des servos Modelcraft (petit parenthèse pour Léon), en vue de les modifier pour avoir un retour d'info sur leur position vers le PIC (CA/N) :
En sortie du potar d'asservissement, on trouve une tension variant de 0.5V a 2V , en fonction de la position servo : 0° / 180° , alimenté sous 5V régulés (je n'ai pas encore testé en non régulé..mais ya peut etre une zener planquée sur la carte du servo ... ca serait une bonne nouvelle
)Leon, si tu as l'occasion, pourrais tu mesurer ca sur d'autres servos tels que les tiens ? j'aurais aimé savoir s'il y'a en quelque sorte un 'standard' dans ces mesures, d'un servo a l'autre.
Ma prochaine étape electronique est le branchement du clavier et de l'afficheur d'état + interfacage avec le PIC qui doit gérer tout ça !
bref j'ai du pain sur la planche,
@bientot ! et merci pour vos encouragements, vos commentaires et vos conseils :=)
#13186 mon "premier" robot
Posté par
sur 11 septembre 2009 - 10:57
dans
Robots mixtes / hybride
Eh oui aqua !
bon je dois dire que le monde est tellement bien fait que je suis gardien de nuit : j'ai du temps pour cogiter mon truc , et je bosse dessus pendant mes jours de repos.
la video d'un 1.5 parcourus est ici :
http://www.eihis.com/robotics/spider6/spider_walk_11-09-2009.AVI (9Mo)
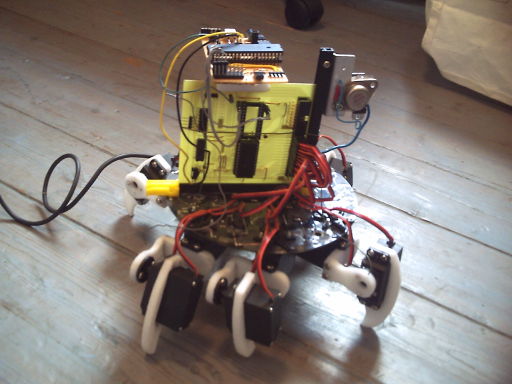
-- on peut constater la démarche qui ressemble a celle d'un mec bourré ou encore un peu celle d'un patineur, vu de derrière (ya des trucs a peaufiner lol) .
..et une photo de la bete a l'arret, avec le montage (hasardeux) des 3 cartes.
dédicace a léon qui reconnaitra le transistor "poubelle a watt" en aileron arrière ( je me suis dit que si la bete allait trop vite, ca pourrait la stabiliser dans les courbes! )
)
bon je dois dire que le monde est tellement bien fait que je suis gardien de nuit : j'ai du temps pour cogiter mon truc , et je bosse dessus pendant mes jours de repos.
la video d'un 1.5 parcourus est ici :
http://www.eihis.com/robotics/spider6/spider_walk_11-09-2009.AVI (9Mo)
-- on peut constater la démarche qui ressemble a celle d'un mec bourré ou encore un peu celle d'un patineur, vu de derrière (ya des trucs a peaufiner lol) .
..et une photo de la bete a l'arret, avec le montage (hasardeux) des 3 cartes.
dédicace a léon qui reconnaitra le transistor "poubelle a watt" en aileron arrière ( je me suis dit que si la bete allait trop vite, ca pourrait la stabiliser dans les courbes!
)
Image(s) jointe(s)
#13184 mon "premier" robot
Posté par
sur 11 septembre 2009 - 10:05
dans
Robots mixtes / hybride
Oh léon , ne fait pas du boudin ... je t'ai dit que je cherchais la petite bete.
Ton choix est censé , j'ai pris note !
Pour ce qui est ne la conso des servos, actuellement, en mouvement, l'araignée monte en pic a 1A sous 12V ( et c'est sans forcer exagérement sur les servos, cad faisant 'normallement' marcher les bras).
Ce que je trouve interressant a l'heure actuelle c'est que la programmation-même des mouvements de chaque element oblige a une reflection sur la consommation ( de maniere a ce que les servos ne bouffent pas 'un max' ) , chose que dame nature a réglé toute seule en millions d'années.
on fait un robot, et on retombe sur les memes problemes : c'est génial
A part ça, pour l'instant, la sequence marche 'avant' est terminée, mais je dois maintenant ajuster les mouvements synchrones pour optimiser la trajectoire (mouvement circulaire -> mouvement rectiligne des 'avant' bras a compenser avec une rotation des elements touchant le sol )
Je n'ai pas pesé la bete, mais 3 cartes epoxy+composants + 12*37g , ca devrait faire dans les 500grammes au max ...
Combien pesent des accus NimH ? des Lipo ? des LiIon ?
Merci pour tes réponses
... je t'ai dit que je cherchais la petite bete.Ton choix est censé , j'ai pris note !
Pour ce qui est ne la conso des servos, actuellement, en mouvement, l'araignée monte en pic a 1A sous 12V ( et c'est sans forcer exagérement sur les servos, cad faisant 'normallement' marcher les bras).
Ce que je trouve interressant a l'heure actuelle c'est que la programmation-même des mouvements de chaque element oblige a une reflection sur la consommation ( de maniere a ce que les servos ne bouffent pas 'un max' ) , chose que dame nature a réglé toute seule en millions d'années.
on fait un robot, et on retombe sur les memes problemes : c'est génial
A part ça, pour l'instant, la sequence marche 'avant' est terminée, mais je dois maintenant ajuster les mouvements synchrones pour optimiser la trajectoire (mouvement circulaire -> mouvement rectiligne des 'avant' bras a compenser avec une rotation des elements touchant le sol )
Je n'ai pas pesé la bete, mais 3 cartes epoxy+composants + 12*37g , ca devrait faire dans les 500grammes au max ...
Combien pesent des accus NimH ? des Lipo ? des LiIon ?
Merci pour tes réponses
#13176 Logiciel pour Circuits Imprimés
Posté par
sur 10 septembre 2009 - 04:27
dans
Electronique
Hello ,
j'utilise actuellement EAGLE pour le routage (enfin.. c'est un bien grand mot, vu que l'intelligence humaine dépasse allègrement les capacités de routage d'Eagle )
Le hic c'est que la version light gratuite n'apporte aucun support valable dès qu'on veut pousser un peu dans son utilisation ( de meme la taille de la carte est limitée..)
Connaissez vous d'autres logiciels gratuits et efficaces (et non limités) ?
En particulier (a moins que je n'ai pas trouvé comment le configurer sous eagle), je cherchais un logiciel capable d'implanter les composants a des angles 'exotiques', par exemple 30°,60° etc ), et/ou de créer des face cuivre 'inverses', je veux dire par la que les pistes sont très 'larges' et le logiciel fait un détourage des connections, plutot qu'une piste pour relier 2 pads (ceci dans le but de graver plus vite et de bouffer moins de perchlo a chaque gravure)
any ideas ?
j'utilise actuellement EAGLE pour le routage (enfin.. c'est un bien grand mot, vu que l'intelligence humaine dépasse allègrement les capacités de routage d'Eagle )
Le hic c'est que la version light gratuite n'apporte aucun support valable dès qu'on veut pousser un peu dans son utilisation ( de meme la taille de la carte est limitée..)
Connaissez vous d'autres logiciels gratuits et efficaces (et non limités) ?
En particulier (a moins que je n'ai pas trouvé comment le configurer sous eagle), je cherchais un logiciel capable d'implanter les composants a des angles 'exotiques', par exemple 30°,60° etc ), et/ou de créer des face cuivre 'inverses', je veux dire par la que les pistes sont très 'larges' et le logiciel fait un détourage des connections, plutot qu'une piste pour relier 2 pads (ceci dans le but de graver plus vite et de bouffer moins de perchlo a chaque gravure)
any ideas ?
#13174 Leon
Posté par
sur 10 septembre 2009 - 03:53
dans
Et si vous vous présentiez?
C'est DARK-LEON qui s'exprime ! 
Mr Dollar dit : "On a pas besoin de robots pensants pour souder des voitures ! mais pour faire la guerre....faut voir "
Mr Dollar dit : "On a pas besoin de robots pensants pour souder des voitures ! mais pour faire la guerre....faut voir "
#13173 mon "premier" robot
Posté par
sur 10 septembre 2009 - 03:45
dans
Robots mixtes / hybride
kikou léon !
pas de panique : je régule mes servos pour des raisons bien précises :
1-Je fais mes tests a partir d'une alim variable
2-J'ai besoin d'une tension fixe pour mesurer facilement le courant consommé par la suite ( cf. mon idée de stratégie pour le developpement de l'IA : pression 'energetique' )
3-Dans le cas ou je ferais une modif servo pour avoir leur position en données entrantes, la tension qui reviendra dépendra directement , a sa valeur maximale, de la tension d'alim des servos : j'ai donc dans l'idée de préparer déja le terrain en faisant tout tourner sous 5v, de facon a ne pas a voir a ajouter de composants si jamais je decidais d'utiliser ce feedback 'position' , vu que la logique de la carte et la carte PIC18F elle meme prévues pour 5V.
Enfin, pour l'instant, l'alim variable en 12V m'est nécéssaire car je bosse sur une carte 'monitoring' (controle par potars + visu de la memoire, etat du pic etc ) connectable qui, elle, tournera en 12V , et cette carte est actuellement directement alimentée par ma carte E/S
Voila pourquoi
pour maintenant, parceque j'ai un esprit de contradiction ( ) :
1 - pour l'efficience, je suis daccord avec toi bien que, tout de meme, on est pas dans des alims de 100taines de watt : j'objecterai que le rapport poids/efficience diminue a mes yeux le gain d'utiliser une alim a découpage ( [ poids de la carte a base de LM2575 avec la grosse self moulée -VS- poids du boitier plastique du 7805 + 2n3055 ] )
2 - limitation des composants = moins de difficultées a trouver les sources de pannes
3 - prix du composant ( lm2575 = 3* lm7805
ok, je cherche la petite bete , je sais !
pas de panique : je régule mes servos pour des raisons bien précises :
1-Je fais mes tests a partir d'une alim variable
2-J'ai besoin d'une tension fixe pour mesurer facilement le courant consommé par la suite ( cf. mon idée de stratégie pour le developpement de l'IA : pression 'energetique' )
3-Dans le cas ou je ferais une modif servo pour avoir leur position en données entrantes, la tension qui reviendra dépendra directement , a sa valeur maximale, de la tension d'alim des servos : j'ai donc dans l'idée de préparer déja le terrain en faisant tout tourner sous 5v, de facon a ne pas a voir a ajouter de composants si jamais je decidais d'utiliser ce feedback 'position' , vu que la logique de la carte et la carte PIC18F elle meme prévues pour 5V.
Enfin, pour l'instant, l'alim variable en 12V m'est nécéssaire car je bosse sur une carte 'monitoring' (controle par potars + visu de la memoire, etat du pic etc ) connectable qui, elle, tournera en 12V , et cette carte est actuellement directement alimentée par ma carte E/S
Voila pourquoi
pour maintenant, parceque j'ai un esprit de contradiction (
) :1 - pour l'efficience, je suis daccord avec toi bien que, tout de meme, on est pas dans des alims de 100taines de watt : j'objecterai que le rapport poids/efficience diminue a mes yeux le gain d'utiliser une alim a découpage ( [ poids de la carte a base de LM2575 avec la grosse self moulée -VS- poids du boitier plastique du 7805 + 2n3055 ] )
2 - limitation des composants = moins de difficultées a trouver les sources de pannes
3 - prix du composant ( lm2575 = 3* lm7805
ok, je cherche la petite bete , je sais !
#13170 mon "premier" robot
Posté par
sur 09 septembre 2009 - 04:22
dans
Robots mixtes / hybride
hm le lm323 je crois, de mémoire fait 3A .
bon le montage avec 3055 donne de la marge, pas besoin d'un dissipateur énorme a priori.j'ai ajouté une capa de 470uf en sortie, et une 1n4007 entre la masse et la masse du régulteur pour compenser la perte de la jonction B-E du transistor. a l'arrivé, 5.2V et ca passe nickel, le 7805 n'est plus du tout chaud.
j'ai passé l'après midi a faire une sequence pour patte .. une video bientot !
@+ et merci pour vos réponses !
bon le montage avec 3055 donne de la marge, pas besoin d'un dissipateur énorme a priori.j'ai ajouté une capa de 470uf en sortie, et une 1n4007 entre la masse et la masse du régulteur pour compenser la perte de la jonction B-E du transistor. a l'arrivé, 5.2V et ca passe nickel, le 7805 n'est plus du tout chaud.
j'ai passé l'après midi a faire une sequence pour patte .. une video bientot !
@+ et merci pour vos réponses !
#13165 mon "premier" robot
Posté par
sur 09 septembre 2009 - 01:44
dans
Robots mixtes / hybride
... en faisant des test en comparant les S3003 de futaba et les modelcraft je me suis aperçu que les modelcrafts consommaient plus. Lors d'un déplacement demandant du couple les futaba montaient à environ 500mA (de mémoire) en pic et les modelcraft à presque le double. A voir pour l'autonomie du robot, c'est toujours bon à savoir.
premiers tests et recherche des min/max pour les positions des servos :
en initialisant les 12 simultanément, la conso s'envole, le pauvre 7805 surchauffe : forcément, 1A pour 12servos...c'etait un peu limite...
modification : j'ajoute un regulateur 7805 monté sur un 2n3055 pour la section servos. du coup, petite coupure piste et modif sur la carte E/S ... des choses qui arrivent
j'aimerais savoir quel systeme vous utilisez pour la régule de vos accus ?
@bientot !
#13163 Emergence et reseau de neurones
Posté par
sur 08 septembre 2009 - 08:27
dans
Intelligence artificielle
ouhhhhh excellent !
je vais consulter tout ça.
justement , le fait de qualifier de 'gaz' me fait penser que j'avais lu quelque part que des regles de conway avaient étées dérivées certaines, très proches, pour la simulation de l'inflamation de gaz dans un milieu fermé ...
bon, je suis dans votre trip alors (lol).
la meilleure, c'est que je pensais , comme j'en avais parlé dans un post précédent, appliquer ensuite un algorythme génétique pour selectionner parmi plusieurs reseaux concurrent dans la meme tache..
que du bonheur.merci pour ta réponse ! @biento et bon courage dans tes recherches
je vais consulter tout ça.
justement , le fait de qualifier de 'gaz' me fait penser que j'avais lu quelque part que des regles de conway avaient étées dérivées certaines, très proches, pour la simulation de l'inflamation de gaz dans un milieu fermé ...
bon, je suis dans votre trip alors (lol).
la meilleure, c'est que je pensais , comme j'en avais parlé dans un post précédent, appliquer ensuite un algorythme génétique pour selectionner parmi plusieurs reseaux concurrent dans la meme tache..
que du bonheur.merci pour ta réponse ! @biento et bon courage dans tes recherches
#13161 mon "premier" robot
Posté par
sur 08 septembre 2009 - 01:38
dans
Robots mixtes / hybride
bah écoute, si je peux t'aider niveau electronique, n'hésite pas!
a part ça, les 6 pattes sont assemblées et montées, et voila 2 photos !
@bientot pour la suite des réjouissances
a part ça, les 6 pattes sont assemblées et montées, et voila 2 photos !
@bientot pour la suite des réjouissances
Image(s) jointe(s)


#13159 robot bipede, progression lente
Posté par
sur 08 septembre 2009 - 10:23
dans
Robots à pattes et jambes, humanoïdes, bipèdes, quadrupèdes, hexapodes ...
L'histoire de kilos et newtons, ca me fait un peu peur...
peut etre que tu devrais lire un peu de trucs sur les bases de mécanique, pour un projet comme bipède ?
Mais bon, 3.7Kg/cm , ca te fait 3.7Kg soulevables par un bras d'1cm sur le servo. donc,1.85kg a 2cm, etc... pour un bras de 10cm : 370grammes .... a toi de faire les conclusions
peut etre que tu devrais lire un peu de trucs sur les bases de mécanique, pour un projet comme bipède ?
Mais bon, 3.7Kg/cm , ca te fait 3.7Kg soulevables par un bras d'1cm sur le servo. donc,1.85kg a 2cm, etc... pour un bras de 10cm : 370grammes .... a toi de faire les conclusions
#13158 Emergence et reseau de neurones
Posté par
sur 08 septembre 2009 - 09:51
dans
Intelligence artificielle
Bonjour,
j'ai parcouru les sujets du forum et je souhaiterais connaitre vos opinions sur une idée qui me trotte depuis pas mal de temps.
Si vous avez déja quelques connaissances sur le sujet des reseaux neuronaux, ca va etre plus pratique.
Sur le principe de base, le reseau de neurone doit passer par une phase d'apprentissage : pendant cette phase , certaines liaisons sont renforcées , d'autres affaiblies.
Hors une des lois de base est que lorsque 2 neurones présentent un déclenchement synchrone lors d'un stimulus, la liaison qui les lie se renforce.
De plus, un neurone qui a un déclenchement 'tout ou rien' , par exemple, réagit au resultat d'une SOMME de signaux entrants : passé un certain seuil, il devient 'passant' , et en deça, il est 'bloqué'.
Bon tout ça, on le sait.
Mais avez vous déja étudié un peu les simulateurs dits 'du jeu de la vie' ?
les regles du jeu de la vie ont étés inventées par CONWAY. si vous ne connaissez pas ce sujet, je vous invite a chercher sur le net, wiki etc. il y'a des tonnes de simulateurs gratuits.
Ces automates cellulaires ont été démontrés etre capable de simuler toutes les fonctions d'une machine Turing.
J'en viens au sujet de ma reflection :
Les automates cellulaires de conway réagissent a des regles simples, qui sont , en schématisant :
passé un certain seuil de population environant une cellule 'vide', une cellule 'vivante' est crée.
et
au dela d'un certain seuil entourant une cellule vivante, celle ci meurt (par surpopulation, pourrait-on dire) .
Les regles de conway, simples, créent des comportements complexes : toute une population EMERGENTE d'etres cellulaires se creent, et interragissent.
Mon idée, c'est en fait de faire appliquer a un reseau neural les regles de conway, de facon a ce que les POIDS et les liaisons existantes découlent directement des regles de conway.
de cette facon, un neurone précis peut, au dela d'un certain seuil, creer de nouvelles liaisons (signaux) vers des neurones non connectés jusqu'alors (exactement comme une cellule, dans le jeu de la vie,peut le faire par déplacement), ou bien en détruire (encore une fois , comme dans le jeu de la vie.
de cette facon, on ferait passer le reseau neural 'simple' et plutot statique a un état dynamique permanent et emergent (puisque répondant a des regles qui sont de nature a créer un systeme instable tendant a l'emergence)
notre atout dans ce cas, sera que les regles du jeu de la vie sont déja connues comme fonctionnant, pour créer un systeme dit 'emergent'.
J'ajoute que j'ai déja fait un simulateur 3D (avec blitz basic 3d), et que le systeme du jeu de la vie 2D fonctionne aussi en 3d (jai pu le tester en cube de 10x10x10 cellules), moyennant une modification des VALEURS de seuil ( naissance/mort d'une cellule) seulement.
des idées ? ce sujet me trirure l'esprit depuis pas mal de temps , j'avoue.
@+
j'ai parcouru les sujets du forum et je souhaiterais connaitre vos opinions sur une idée qui me trotte depuis pas mal de temps.
Si vous avez déja quelques connaissances sur le sujet des reseaux neuronaux, ca va etre plus pratique.
Sur le principe de base, le reseau de neurone doit passer par une phase d'apprentissage : pendant cette phase , certaines liaisons sont renforcées , d'autres affaiblies.
Hors une des lois de base est que lorsque 2 neurones présentent un déclenchement synchrone lors d'un stimulus, la liaison qui les lie se renforce.
De plus, un neurone qui a un déclenchement 'tout ou rien' , par exemple, réagit au resultat d'une SOMME de signaux entrants : passé un certain seuil, il devient 'passant' , et en deça, il est 'bloqué'.
Bon tout ça, on le sait.
Mais avez vous déja étudié un peu les simulateurs dits 'du jeu de la vie' ?
les regles du jeu de la vie ont étés inventées par CONWAY. si vous ne connaissez pas ce sujet, je vous invite a chercher sur le net, wiki etc. il y'a des tonnes de simulateurs gratuits.
Ces automates cellulaires ont été démontrés etre capable de simuler toutes les fonctions d'une machine Turing.
J'en viens au sujet de ma reflection :
Les automates cellulaires de conway réagissent a des regles simples, qui sont , en schématisant :
passé un certain seuil de population environant une cellule 'vide', une cellule 'vivante' est crée.
et
au dela d'un certain seuil entourant une cellule vivante, celle ci meurt (par surpopulation, pourrait-on dire) .
Les regles de conway, simples, créent des comportements complexes : toute une population EMERGENTE d'etres cellulaires se creent, et interragissent.
Mon idée, c'est en fait de faire appliquer a un reseau neural les regles de conway, de facon a ce que les POIDS et les liaisons existantes découlent directement des regles de conway.
de cette facon, un neurone précis peut, au dela d'un certain seuil, creer de nouvelles liaisons (signaux) vers des neurones non connectés jusqu'alors (exactement comme une cellule, dans le jeu de la vie,peut le faire par déplacement), ou bien en détruire (encore une fois , comme dans le jeu de la vie.
de cette facon, on ferait passer le reseau neural 'simple' et plutot statique a un état dynamique permanent et emergent (puisque répondant a des regles qui sont de nature a créer un systeme instable tendant a l'emergence)
notre atout dans ce cas, sera que les regles du jeu de la vie sont déja connues comme fonctionnant, pour créer un systeme dit 'emergent'.
J'ajoute que j'ai déja fait un simulateur 3D (avec blitz basic 3d), et que le systeme du jeu de la vie 2D fonctionne aussi en 3d (jai pu le tester en cube de 10x10x10 cellules), moyennant une modification des VALEURS de seuil ( naissance/mort d'une cellule) seulement.
des idées ? ce sujet me trirure l'esprit depuis pas mal de temps , j'avoue.
@+
#13157 mon "premier" robot
Posté par
sur 08 septembre 2009 - 09:08
dans
Robots mixtes / hybride
hey aquanum .. je regardais ton site avec Genesis... et je sens que ton aide me sera utile plus tard .
plus je réfléchis et plus je sens qu'un pic va etre trop limité en terme de gestion de l'IA, meme en intégrant une reseau de neurones 'en hard' ( c'etait mon idée de base) : du coup, il faudra surement faire un interface de comm. avec un pc dans un premier temps : tes renseignements me seront précieux.
j'ai déja utilise la lib SDL , mais c'etait une SDL pour les graphisme 2D en c. est ce de la meme dont tu parles ?
@+
plus je réfléchis et plus je sens qu'un pic va etre trop limité en terme de gestion de l'IA, meme en intégrant une reseau de neurones 'en hard' ( c'etait mon idée de base) : du coup, il faudra surement faire un interface de comm. avec un pc dans un premier temps : tes renseignements me seront précieux.
j'ai déja utilise la lib SDL , mais c'etait une SDL pour les graphisme 2D en c. est ce de la meme dont tu parles ?
@+




