Avec 2x 24v 5A Pour l’électronique, je ne pense pas qu'il y ai besoins de batterie de secours. La tu dois avoir quelques chose comme mini 36h d'autonomie.
Par contre si toute les batteries sont controlé par relais, comment tu active le robot ??
Il y a 1000 élément(s) pour Microrupteurman (recherche limitée depuis 12-mai 13)
 Posté par
sur 31 août 2020 - 08:24
dans
Robots roulants, chars à chenilles et autres machines sur roues
Posté par
sur 31 août 2020 - 08:24
dans
Robots roulants, chars à chenilles et autres machines sur roues
Avec 2x 24v 5A Pour l’électronique, je ne pense pas qu'il y ai besoins de batterie de secours. La tu dois avoir quelques chose comme mini 36h d'autonomie.
Par contre si toute les batteries sont controlé par relais, comment tu active le robot ??
Posté par
sur 28 août 2020 - 04:17
dans
Electronique
faut-il réellement un codeur sur chaque moteur ?
Vu tes besoins, non. Comme les deux moteurs sont reliés par la chenille, le plus rapide devrai accélérerai l'autre, et inversement, et donc sortir le même rpm.
Posté par
sur 22 août 2020 - 04:49
dans
Robots roulants, chars à chenilles et autres machines sur roues
Pour "fixée" les batteries, je dirais intercalaire en mousse plastique blanche (du type qui entoure nos colis chinois) et bloc de mousse plastique noir dessus dessous (comme les emballages d'imprimante 3D)
Posté par
sur 20 août 2020 - 04:35
dans
Programmation
Testé et pas approuvé. Comme Firened me l'avait dit, on perd de la réponse. Avec un niveaux de pwm égale, à 20khz, le moteur tourne beaucoup beaucoup plus lentement.
Posté par
sur 20 août 2020 - 12:58
dans
Robots roulants, chars à chenilles et autres machines sur roues
" The 5V, and 12V regulators each have 6 outputs that fit a JST-PA 2mm header."
Posté par
sur 19 août 2020 - 11:50
dans
Robots roulants, chars à chenilles et autres machines sur roues
Peut être du jst-xh
Tu fait ce que tu veux mais 43$ la dessus, c'est du vol....
Posté par
sur 19 août 2020 - 08:55
dans
Bric-à-brac
Si tu passes par Jlc, tu passe par EasyEda, ca évitera des erreurs et des oublies. Il te dit toutes les pins non connectées, et fait le routage du pcb automatiquement.
Posté par
sur 19 août 2020 - 08:35
dans
Bric-à-brac
est-ce qu'il faut prendre une plaque époxy cuivrée brute
Oui.
Pour protéger le circuit: https://www.banggood...CN&rmmds=search
Dans ton cas après soudure, a moins de faire un pochoir.
mais la gravure avec la CNC
Je te conseil de faire des tests avant de faire un vrai circuit. Sur la mienne je sais que c'est pas possible.
Posté par
sur 19 août 2020 - 12:40
dans
Mécanique
Salut, si ça peut aidé.
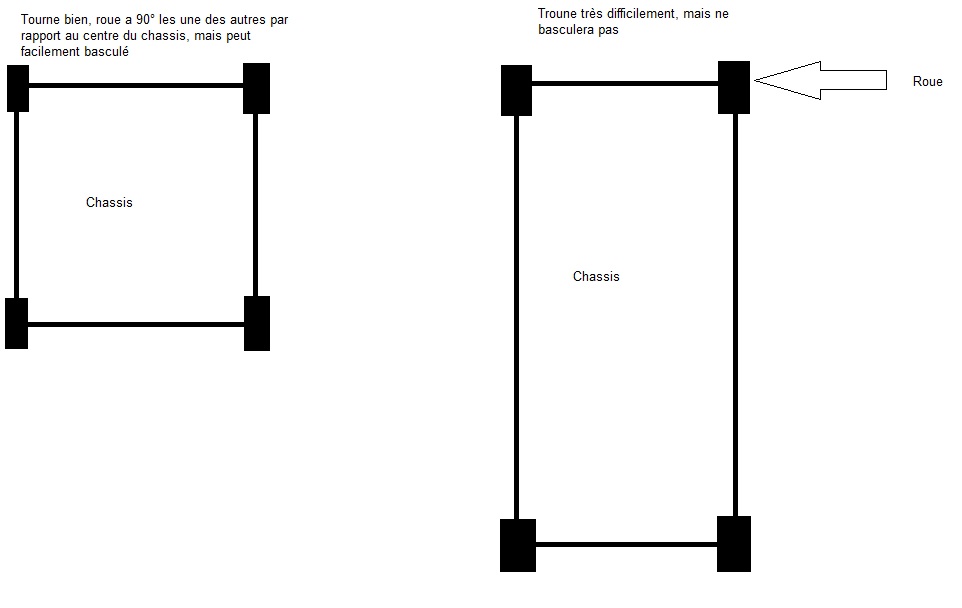
J'avais eût le meme souci lors de mes debuts avec les robots à chenilles, je les faisait trop long, sur un sol adhérant, impossible de tourné.
Un moyen de modifié adherence, changer les pneus par des pneus moins large.
Posté par
sur 14 août 2020 - 09:23
dans
Programmation
GTTCR |= 0b01110000;
Haaa, je me douter bien qu'il le fallait aussi pour définir la sortie PB4 ! j'avais noter "GTCCR =GTCCR & 0b1111010;"
Yes i can select : nothing, 32mhz and 64mhz.
Ok, thank you. I wouldn't have thought that to define OCR1C was so simple.
Posté par
sur 14 août 2020 - 08:47
dans
Programmation
Hello,
Le but de cette fréquence est de rendre inaudible le son du pwm dans les moteurs.La fréquence n'est pas choisis au hasard, c'est la fréquence max à partir de laquelle on n'entend plus le son et la fréquence max que je peut balancer dans mon pont en H est 25khz.
Pour cela, il faut changer la fréquence du timer/counter 1
Page 89 https://ww1.microchi...5_Datasheet.pdf
Les sources qui m'aide à faire le réglage :
https://www.electros...-using-arduino/
https://forum.arduin...?topic=174349.0
http://www.technoblogy.com/show?QVN
Pour avoir cette fréquence pwm de 20khz, il faut utilisé un mode asynchrone cadencé à 60Mhz, directement sélectionnable dans l'IDE Arduino. Ensuite il faut divisé cette fréquence par 16 comme indiqué dans le tableau de la datasheet page 88. J'ai fini par en déduire cette ligne "TCCR1=TCCR1 & 0b11110101 | 0x01; ". Cela dit, autant je peut comprendre la première partie (avant | ) autant l'autre...... Et ensuite il faut définir la valeur de OCR1C à 199 est là aucune idée de comment procédé.
Peut être faut il changer 0x01 par 0xC7 (199 en hexa) ?
OCR1C gère OC1a (pb1) et OC1b (pb4) ( () = sortie )
C'est très compliqué pour moi, d'autant que tout est en anglais ! Et de plus, pour validé ou invalidé, je n'est que tinkercad, mais il ne semble pas prendre en compte la modification des registres...
Posté par
sur 14 août 2020 - 02:13
dans
Robots roulants, chars à chenilles et autres machines sur roues
la fréquence du PWM sur une Arduino
La fréquence de base est ~976hz et 490hz
C'est pas croyable quand je chercher un moyen de le faire, je trouvé que des solutions ardu à mettre en oeuvre et la je tombe sur ça !
Posté par
sur 09 août 2020 - 03:09
dans
Bric-à-brac
J'en doute, la roue fait 6" (15cm), et 4" =10cm, seulement 2.5cm de haut le pneu ? Ca me parait peut. Il y a les mêmes chez manomano, mais avec un morceau en plus, et pas plus d'info : https://www.manomano...deporte-9532328
Posté par
sur 07 août 2020 - 08:47
dans
Machines de fabrication
Je viens de commander une breakout board USB
Sans les drivers de pap ?
Posté par
sur 03 août 2020 - 11:18
dans
Machines de fabrication
Eurk !
Posté par
sur 03 août 2020 - 01:28
dans
Machines de fabrication
Alu de 12mm fraise de 6mm, machine d'origine

Elle ressemble à ça ?? 

Posté par
sur 01 août 2020 - 10:39
dans
Logiciels
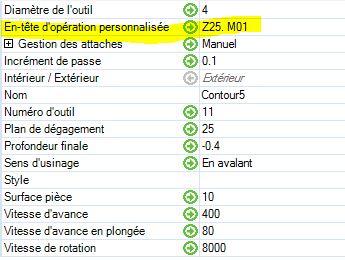
Un Z et M01 à placé dans "en tête d'operation perso", ou "fin d'operation perso"
Ca mettra la machine en stand by le temp que tu change l'outil. Mais attention, il peut arrivé que la machine se perde, mieux vaux faire des programmes différents.
Au passage tu as mes feedrate pour une fraise de 4mm 4Z dans l'alu avec la broche d'origine.
Posté par
sur 22 juillet 2020 - 09:43
dans
Vigibot
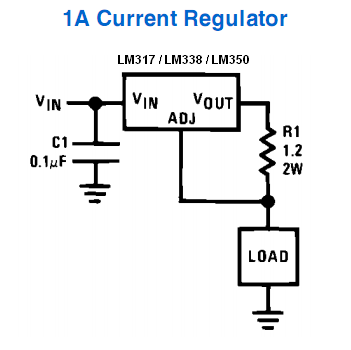
qui a connecter la sortie sur Vout alors qu'elle doit être sur Adjust.
Posté par
sur 22 juillet 2020 - 06:02
dans
Vigibot
Le mec qui picole trop et qui a connecter la sortie sur Vout alors qu'elle doit être sur Adjust. Probablement du fait que je ne l'est toujours utilisé qu'en régulateur de tension. Ca m’énerve ces bêtises, çà devient systématique :/ C'est ça la vieillesse ??
Posté par
sur 22 juillet 2020 - 05:37
dans
Vigibot
Pas question de tension, c'est dans la data :
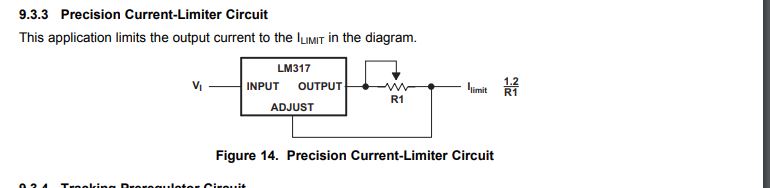
LM317 + resistance = limiteur de courant
C'est bon, je pense avoir trouvé mon erreur.
Posté par
sur 22 juillet 2020 - 11:31
dans
Vigibot
Le but du montage est de limité le courant de sortie à 1A.
Posté par
sur 21 juillet 2020 - 06:20
dans
Vigibot
Posté par
sur 21 juillet 2020 - 05:41
dans
Vigibot
Il y a un truc que j'ai pas du comprendre, je peut sortir plus de 2A au travers le régulateur alors qu'il est configuré pour 1..
Posté par
sur 17 juillet 2020 - 11:48
dans
Vigibot
Les news :
Le mat, avec deux ventirad latéraux qui vont souffler direct sur la pi et ces Hat (relais + vigibot hat), ils seront piloté automatiquement par la Pi. Sur l'arriere, les deux prise d'antennes 4G et le micro. Aussi, deux servo latéraux sur lesquels seront fixé les tubes lance fusées + une leds 3W ( probablement violette). Pour l'allumage, je fabrique de petits allumeur à base de fils nichrome 36awg, en faisant 10 spires, diamètre ~2.5mm, en amont de ces derniers je vais monter des limiteurs de courant pour éviter les chutes de tension.
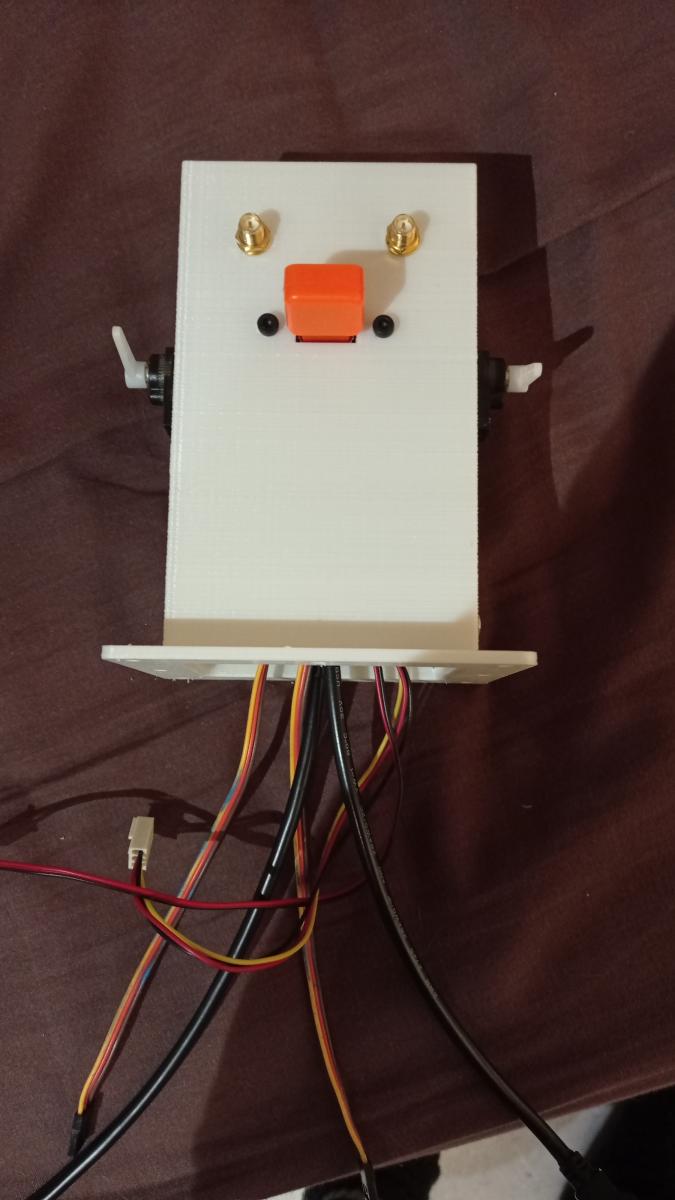
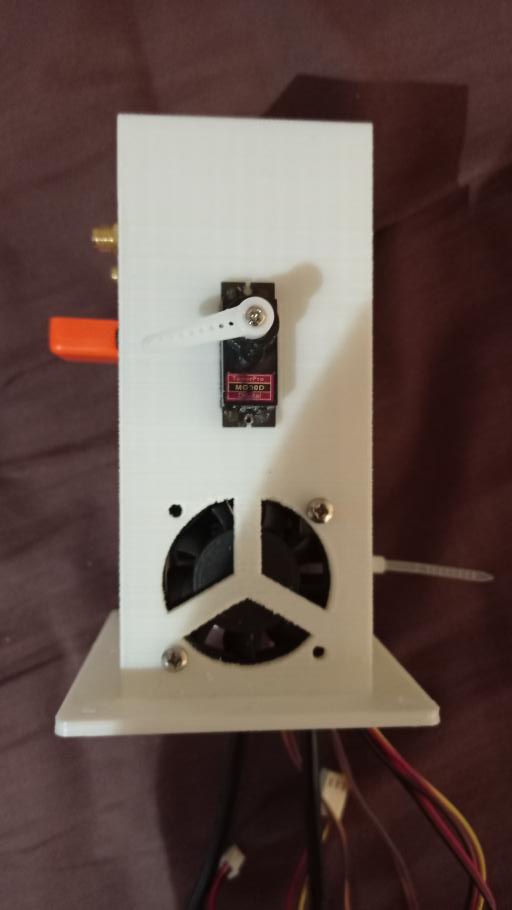
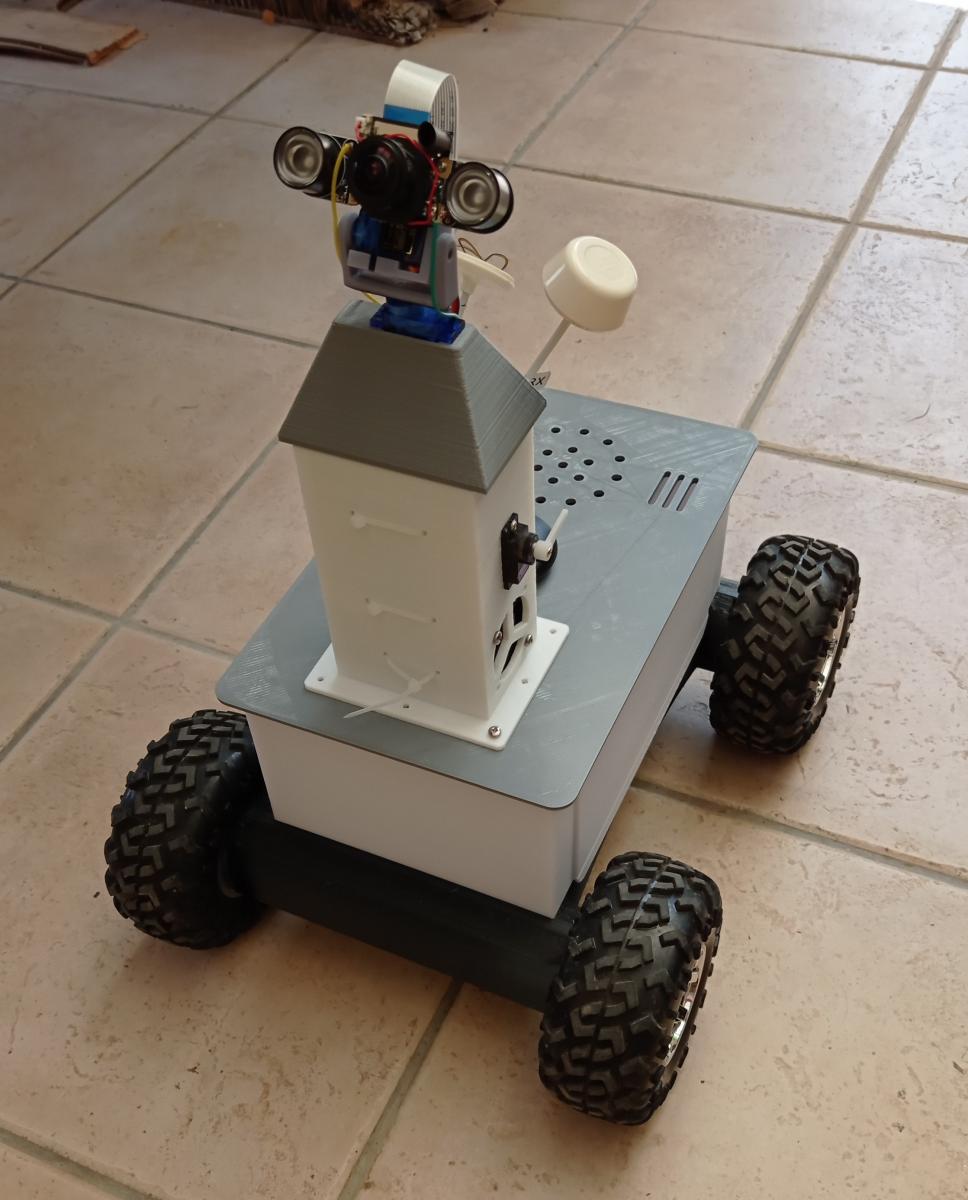
Toutes les pièces imprimées actuellement, monté. On aperçois le gps dans son dome noir derriere le mat ainsi que l'emplacement du HP de 3w. Non visible, à coter de celui ci se trouve le bip bip.
Le limiteur :
Posté par
sur 17 juillet 2020 - 08:34
dans
Et si vous vous présentiez?
Salut, et bienvenue parmi nous




