Contenu de Jekert
Il y a 193 élément(s) pour Jekert (recherche limitée depuis 05-mai 13)
Par type de contenu
Voir pour ce membre
#71157 Servo SG90 de Tower Pro - 1.6kg.cm
 Posté par
sur 15 juin 2016 - 09:41
dans
Servomoteurs
Posté par
sur 15 juin 2016 - 09:41
dans
Servomoteurs
#71144 Passer d'Arduino à Raspberry
Posté par
sur 14 juin 2016 - 10:14
dans
Electronique
Salut,
Il parle de l'interface Série,lorsque tu as téléversé ton programme, en haut à droite de ta fenêtre, il y a une genre de loupe comme ceci :

Il suffit que tu cliques dessus lorsque ton programme tourne et ton Arduino branchée à ton PC, et tu devrai voir apparaitre les suites.
J'espère que cela a pu t'aider.
#71140 Servo SG90 de Tower Pro - 1.6kg.cm
Posté par
sur 14 juin 2016 - 09:04
dans
Servomoteurs
Merci pour tes précisions  , après quelques tests sur un des servos, les valeurs MIN et MAX que j'ai trouvé sont : 450 et 1000, il faudra que je les vérifies sur plusieurs autres.
, après quelques tests sur un des servos, les valeurs MIN et MAX que j'ai trouvé sont : 450 et 1000, il faudra que je les vérifies sur plusieurs autres.
//Bibliothèque :
#include <Servo.h> //Ajoute la librairie Servo
//servo1 :
Servo servo1; //Déclare un nouveau servomoteur nommé servo1
int pos = 0; //Position initiale du servo
#define PAUSE 20 //Symbolise la pause en ms entre chaque mouvements du servo
#define MIN 450 // Position 0° en microseconde
#define MAX 1000 // Position 180° en microseconde
void setup() {
servo1.attach(9, MIN , MAX); //Attache servo1 au pin 9 avec MIN et MAX les extrêmes en microsecondes
}
void loop() {
for (pos = 0; pos <= 180; pos++)
//Rejoins un angle de 180° depuis 0° par pas de 1°
{
servo1.write(pos);
delay(PAUSE);
}
delay(1000);
for (pos = 180; pos >= 0; pos--)
//Rejoins un angle de 0° depuis 180° par pas de 1°
{
servo1.write(pos);
delay(PAUSE);
}
delay(1000);
}
#71052 Servo SG90 de Tower Pro - 1.6kg.cm
Posté par
sur 11 juin 2016 - 08:49
dans
Servomoteurs
Voici le SG90 de chez Tower Pro.
Prix Robot-maker : 3.60 €
http://www.robot-maker.com/shop/moteurs-et-actionneurs/18-servomoteur-9g.html
Spécifications :
Zone morte : -
Maximum pulse largeur : -
Maximum angle : 180°
Moteur : -
Plage de tension: 4.8 - 6.0 V
Vitesse : 4.8 V - 0.12 sec/60°
Couple : 4.8 V - 1.6 kg.cm
Taille : 24x13x29mm (Micro)
Poids : 9gr
Câble : JR 265mm
Roulement : -
Sortie dents : -
Avis perso : Salut,
J'ouvre ce fil pour vous présenter le test du servomoteur 9g SG90, disponible dans la boutique !
Donc deux petites photos pour commencer :

Voici ce qui est prévu pour le test :
- Explications du fonctionnement d'un servomoteur
- Branchement sur l'Arduino Nano + programme de test (inspiré de l'exemple Sweep)
Le programme de test actuel :
//Bibliothèque :
#include <Servo.h> //Ajoute la librairie Servo
//servo1 :
Servo servo1; //Déclare un nouveau servomoteur nommé servo1
int pos = 0; //Position initiale du servo
#define PAUSE 20 //Symbolise la pause en ms entre chaque mouvements du servo
void setup() {
servo1.attach(9); //Attache servo1 au pin 9
}
void loop() {
for (pos = 0; pos <= 180; pos++)
//Rejoins un angle de 180° depuis 0° par pas de 1°
{
servo1.write(pos);
delay(PAUSE);
}
for (pos = 180; pos >= 0; pos--)
//Rejoins un angle de 0° depuis 180° par pas de 1°
{
servo1.write(pos);
delay(PAUSE);
}
}
A bientôt !
#70952 Arduino Nano [testée par Jekert]
Posté par
sur 08 juin 2016 - 06:04
dans
Carte programmables et ordinateurs
Ok, merci de m'avoir corrigé, j'avais mal interprété ce que disais Arduino Reference :
#define is a useful C component that allows the programmer to give a name to a constant value before the program is compiled. Defined constants in arduino don't take up any program memory space on the chip. The compiler will replace references to these constants with the defined value at compile time.
#70950 Arduino Nano [testée par Jekert]
Posté par
sur 08 juin 2016 - 04:24
dans
Carte programmables et ordinateurs
Merci pour vos conseils
J'ai repris ton programme Black Templar et y ai ajouté quelques commentaires, j'en ai aussi profité pour passer Blink_Number en constante vu que je n'aurais pas à modifier la valeur au cours de l'exécution du programme. Donc maintenant le programme ressemble à ça :
//Constantes :
#define PIN_MIN 2 //Numéro de la première sortie digitale
#define PIN_MAX 13 //Numéro de la dernière sortie digitale
#define BLINK_PERIOD 1000 //Temps en ms entre chaque états
#define BLINK_NUMBER 2 // Nombre de clignotement
void setup() {
//Déclarations :
for(int8_t pin = PIN_MIN; pin <= PIN_MAX; pin++)
//Itère tous les pins entre PIN_MIN et PIN_MAX et les déclare comme des sorties
{
pinMode(pin, OUTPUT);
}
}
void loop() {
for (int8_t pin = PIN_MIN; pin <= PIN_MAX; pin++)
//Itère tout les pins digitales entre PIN_MIN et PIN_MAX
{
for (int8_t i=0; i<BLINK_NUMBER; i++)
//Répète le code ci-dessous BLINK_NUMBER fois
{
digitalWrite(pin, HIGH);
delay(BLINK_PERIOD);
digitalWrite(pin, LOW);
delay(BLINK_PERIOD);
}
}
}
Ce qui a permis de passer la taille du programme de 57 lignes à 29, du croquis de 1556o à 1134o et les variables de 61o à 9o.
#70944 Arduino Nano [testée par Jekert]
Posté par
sur 08 juin 2016 - 12:25
dans
Carte programmables et ordinateurs
Merci, je n'y avais pas pensé
#70917 Arduino Nano [testée par Jekert]
Posté par
sur 07 juin 2016 - 10:06
dans
Carte programmables et ordinateurs
Salut !

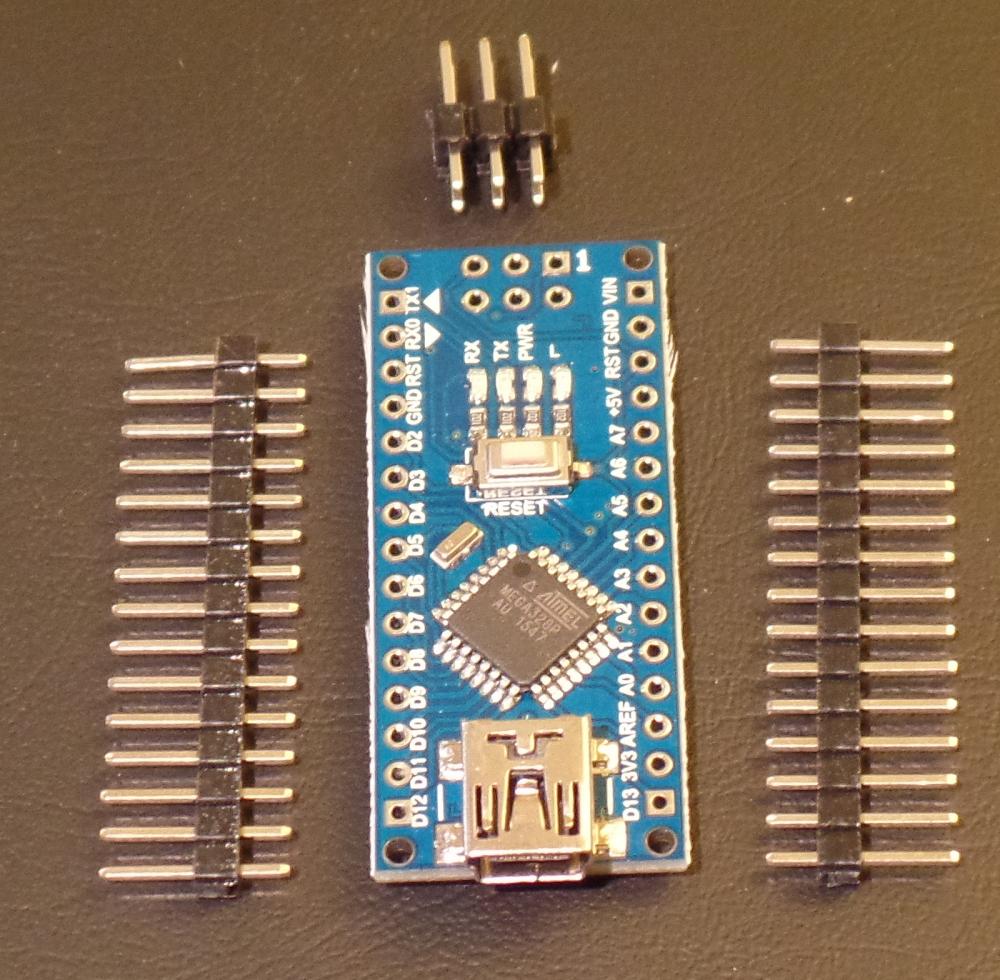
Ce fil sera dédié au test de la carte Arduino Nano disponible dans la boutique et notamment utilisable avec le kit pour robot quadrupède.
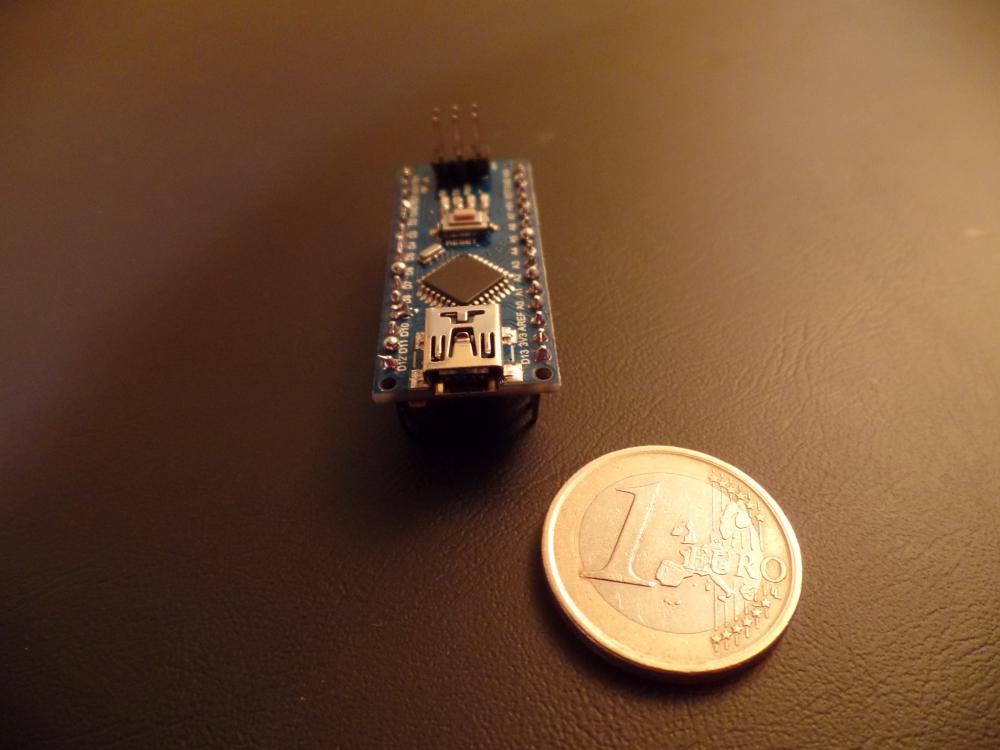
Description:
L'Arduino Nano est une carte créée afin de miniaturiser les systèmes à bases d'Arduino et ainsi de les rendre plus légers, ce qui est très pratique en robotique lorsque l'on travaille dans un espace restreint et où le poids peut être un des ennemis du Maker L'Arduino Nano mesure 45*18 mm et pèse environ 5g. De plus, elle possède la même puissance de calcul qu'une UNO et possède 2 pins analogiques supplémentaires (A6 et A7) et peut fournir 40 mA et 5V par pin digital.
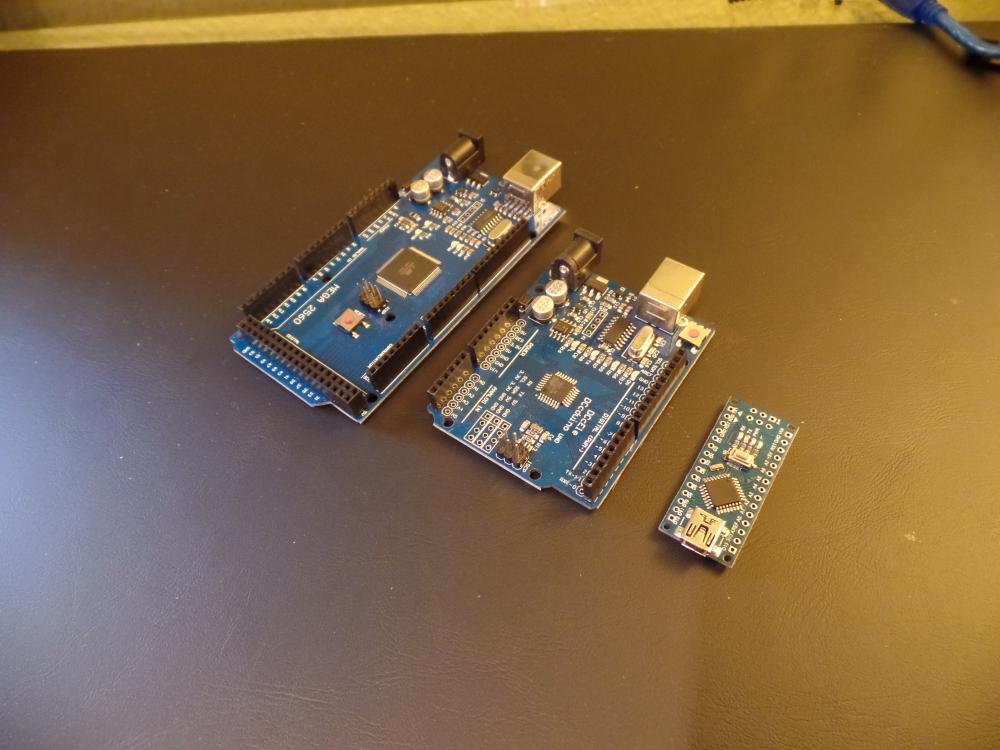
Comparaison avec l'Arduino Uno :
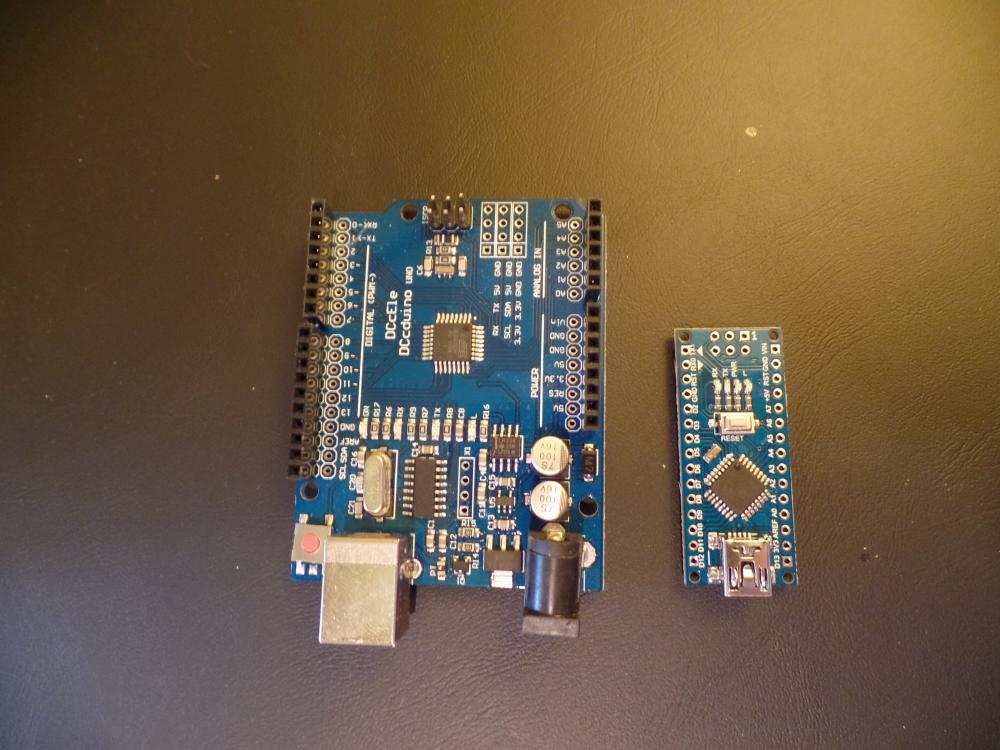
Et la Mega :
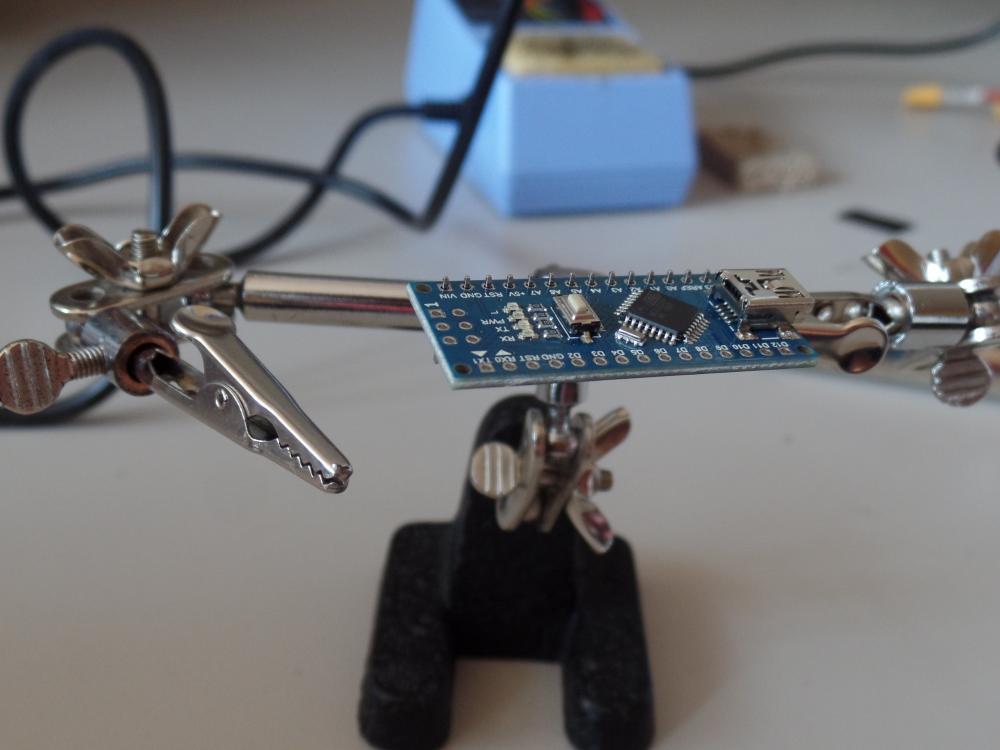
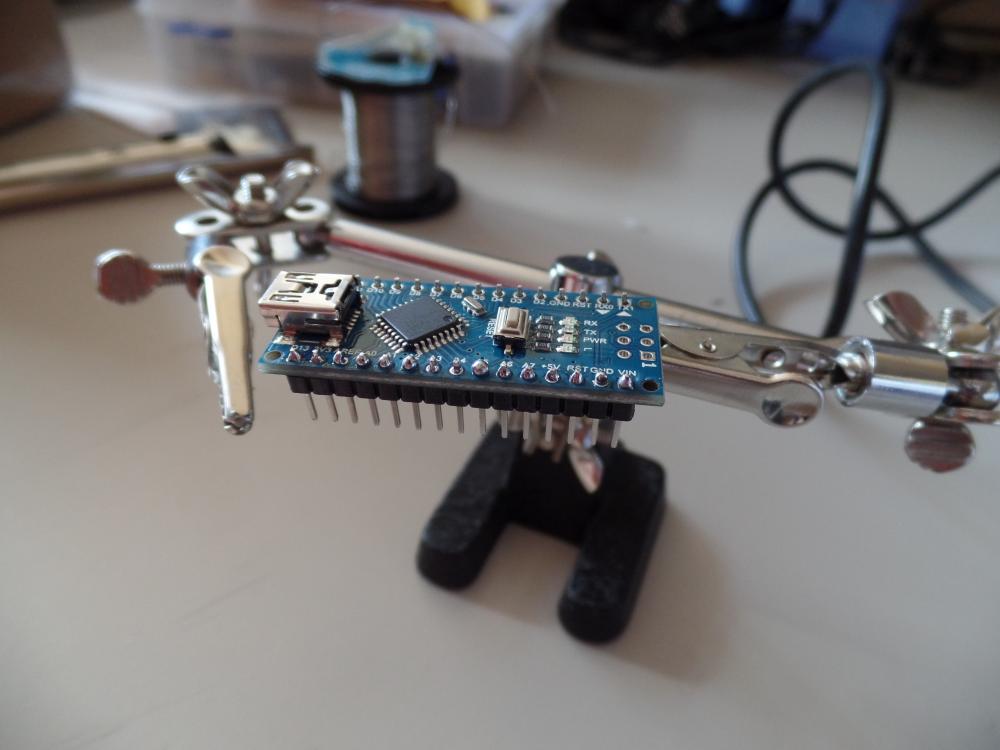
Avant de commencer :
Comme vous avez pu le remarquer, l'Arduino Nano arrive sans les pins soudés à la carte, il vous faudra donc souder chaque pin à la carte afin de s'assurer que tous les pins sont en contact avec la carte . Les soudures se font plutôt facilement, il suffit de faire attention à souder chaque pin sans que les soudures se touchent. N'hésitez pas à utiliser une troisième main et de quoi retirer les soudures maladroites (tresse ou pompe à dessouder).
Pour connecter la carte à votre PC, il vous faudra un câble MiniUSB qui ressemble à ceci:
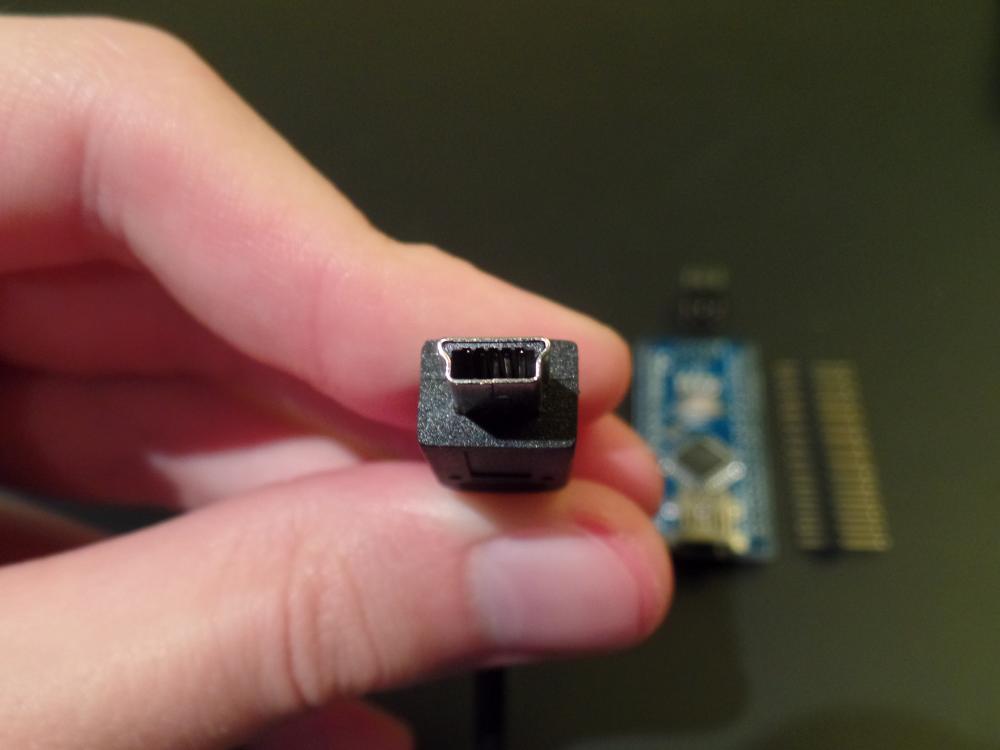
Il n'est pas fournis avec la carte mais c'est un type de connecteur répandu, vous n'aurez aucun mal à en trouver un chez vous, ou dans le commerce si nécessaire.
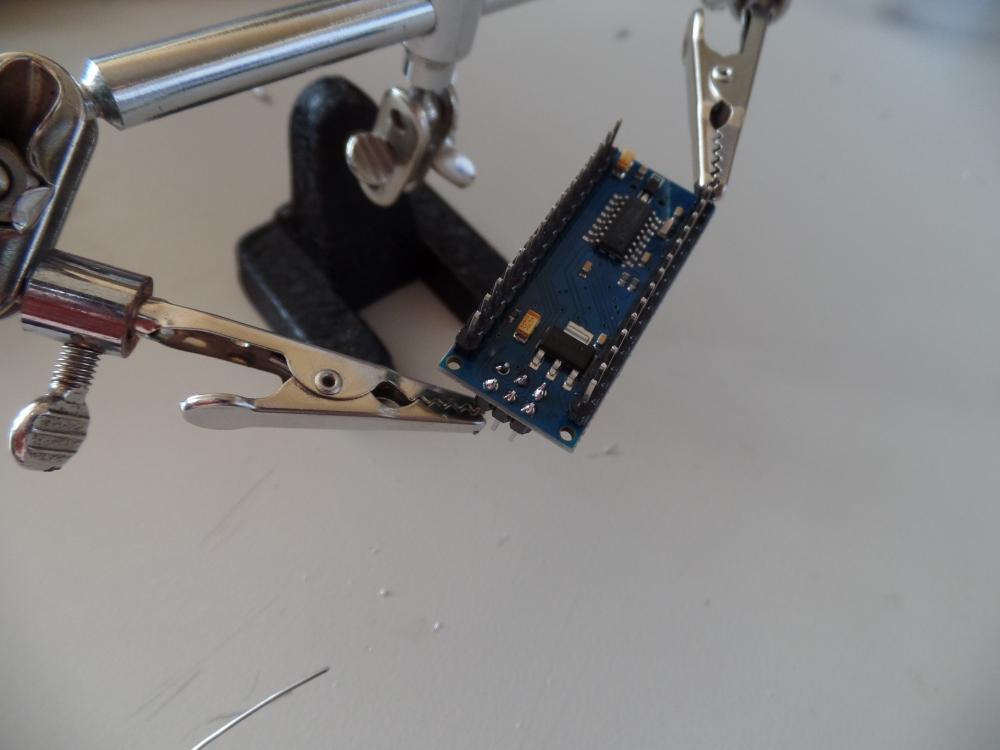
Vérifier les soudures :
N'étant pas encore très à l'aise avec la soudure, j'ai préféré vérifier que toutes les sorties digitales fonctionnent correctement. Pour cela j'ai fait ce petit montage:
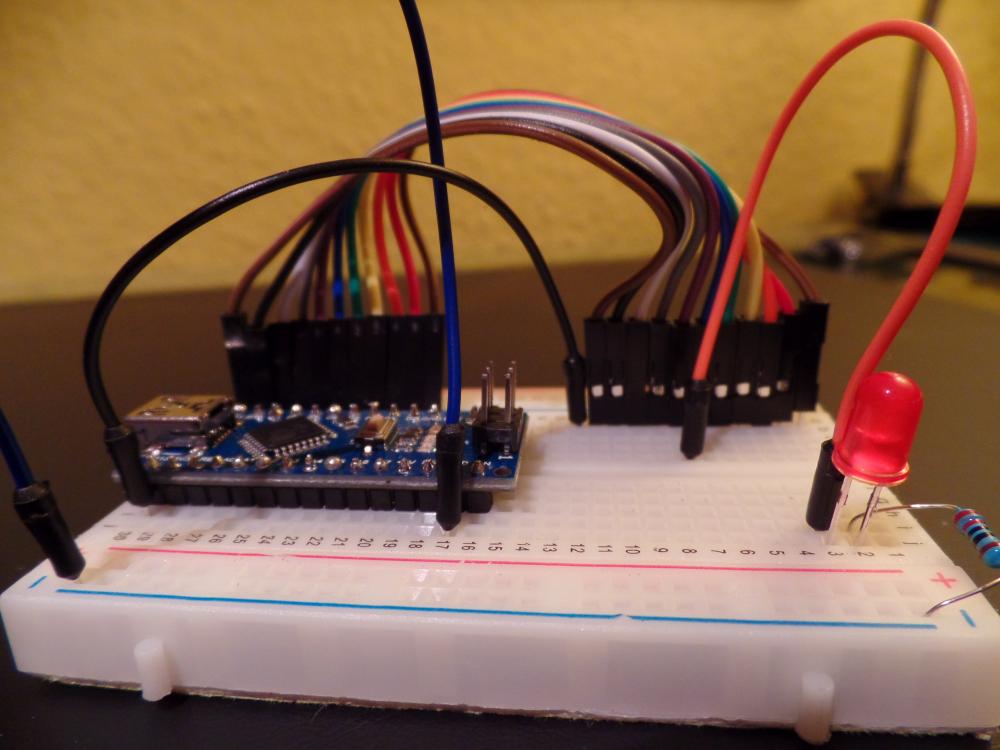
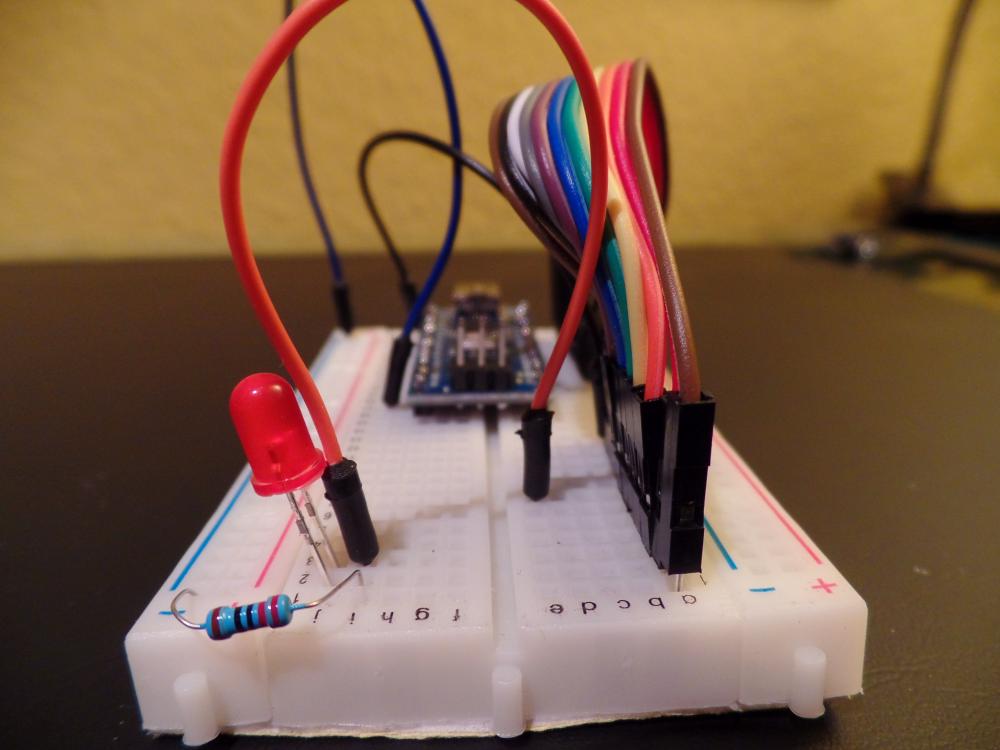
Il permet de tester chaque sortie digitale, de D2 à D13, avec quelques fils, une breadboard, une résistance et une led. Chaque sortie va émettre une tension de 5V 2 fois de suite pendant 1 seconde puis s'éteindre pendant une seconde. Il faudra donc que vous déplaciez l'extrémité du fil orange de droite à gauche.
Voici le programme du montage :
// Pins :
int led2 = 2;
int led3 = 3;
int led4 = 4;
int led5 = 5;
int led6 = 6;
int led7 = 7;
int led8 = 8;
int led9 = 9;
int led10 = 10;
int led11 = 11;
int led12 = 12;
int led13 = 13;
//Variables :
int a = 0;
int pin = 0;
int liste[] = {led2, led3, led4, led5, led6, led7, led8, led9, led10, led11, led12, led13};
void setup() {
//Déclarations :
pinMode(led2, OUTPUT);
pinMode(led3, OUTPUT);
pinMode(led4, OUTPUT);
pinMode(led5, OUTPUT);
pinMode(led6, OUTPUT);
pinMode(led7, OUTPUT);
pinMode(led8, OUTPUT);
pinMode(led9, OUTPUT);
pinMode(led10, OUTPUT);
pinMode(led11, OUTPUT);
pinMode(led12, OUTPUT);
pinMode(led13, OUTPUT);
}
void loop() {
pin = liste [a];
if (a<11){
a++;
}
else{
a = 0;
}
digitalWrite(pin, HIGH);
delay(1000);
digitalWrite(pin, LOW);
delay(1000);
digitalWrite(pin, HIGH);
delay(1000);
digitalWrite(pin, LOW);
delay(1000);
}
Voilà pour le début de mon test sur la carte Arduino Nano. J'ajouterais des détails sur le dernier montage prochainement.
A bientôt pour la suite
N'hésitez pas à poster vos questions, conseils ou commentaires 
#70802 Kit Robot Quadrupède [testé par Jekert]
Posté par
sur 05 juin 2016 - 04:02
dans
Robots en kits
Salut !
Je crée ce fil afin de vous présenter le kit robot quadrupède dont j'ai la chance de faire le test.
Le kit comporte donc :
- 1 Carte Clone Arduino Nano (fil à retrouver ici)
- 12 Servomoteurs 9g Tower Pro SG90 (fil à retrouver ici)
- 1 Driver 16 servomoteurs PCA9685 (fil à retrouver ici)
- 1 Convertisseur de puissance 5V UBEC-7A 6-35V (fil à retrouver ici)
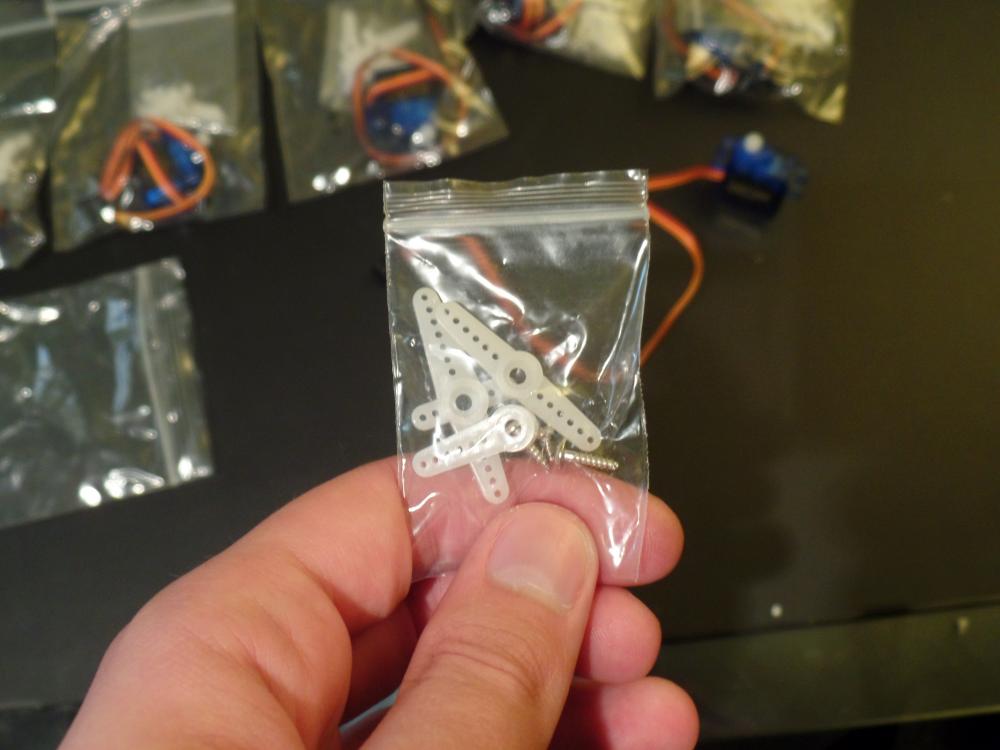
- 1 Ensemble de pièces mécaniques plastique
- ~1 m de gaine spirale
- 1 Interrupteur
- 120 fils (40 Mâle-Mâle, 40 M-F, 40 F-F)
Bref, il vous suffira d'ajouter une source d'alimentation d'une tension comprise entre 6 et 35V, un petit peu de patience et votre quadrupède sera prêt.
Ce fil sera consacré au kit en lui-même, si vous souhaitez plus d'informations sur l'un de ces produits en particulier, il y aura un fil différent pour chacun d'eux.
Et voici mon calendrier prévisionnel comportant les dates limites de chacune des étapes du test que je m'efforcerais de respecter :
- [FAIT] Étape 0 (02/6): Réception du colis
- [FAIT] Étape 1 (12/6): Présentation du colis + Arduino Nano
- [FAIT] Étape 2 (17/6): Test des servomoteurs 9g
- [FAIT] Étape 3 (22/6): Test du driver 16 servos
- [FAIT] Étape 4 (26/6): Test du convertisseur 5V
- [EN COURS] Étape 5 (03/7): Assemblage du kit et des servomoteurs
- [EN ATTENTE] Étape 6 (09/7): Premiers pas du robot
- [EN ATTENTE] Étape 7 (13/7): Fin de la rédaction du tutoriel
Les fils seront créés au fur et à mesure que le test progresse.
Si vous avez des questions, des conseils n'hésitez pas
Le déballage :
L'ayant reçu jeudi, voici une petite vidéo du déballage du colis :
Le colis fait environ 20*15*16 cm et pèse 690g.
Chaque élément est emballé dans une pochette plastique et/ou plusieurs couches de papier bulle sauf pour les fils et l'interrupteur. Et une fois que tout est déballé :

À bientôt pour la suite du test !
#70467 Cherche logiciel 3D ...
Posté par
sur 26 mai 2016 - 10:44
dans
Bric-à-brac
Salut,
Je ne m'y connais pas vraiment en modélisation 3D, mais j'ai entendu parler récemment de 123D Design qui est un logiciel gratuit.
Après je ne sais pas si il est adapté à tes besoins, je ne l'ai jamais utilisé...
#70392 Base de rechargement robot bipede
Posté par
sur 24 mai 2016 - 07:55
dans
Energie
Par contre, je ne suis pas expert du tout en énergie et pense donc être au bon endroit pour en parler!
Le système est il dangereux?
Le chargeur sera donc branché en permanence avec les cosses - et + connecté aux plaques alu et ne sera activé que quand le robot sera assis dessus. (théorie)
Imaginons qu'un chat, enfant ou autre appuis sur le bouton de charge alors que le robot n'est pas assis dessus? Que se passe t'il?
Concernant les risques je ne peut pas t'aider mais si tu cherches une solution pour activer la charge seulement lorsqu'il y a le robot, pourquoi pas utiliser une puce et un lecteur NFC/RFID qui contrôle l'alimentation du chargeur.
#69992 Champ parasite et boussole électronique.
Posté par
sur 13 mai 2016 - 08:24
dans
Electronique
Salut,
Et question bête, si le problème vient de la vis, doit-elle être forcément métallique ? sinon il y a les vis en nylon par exemple
#69708 Crawling Robot ou l'apprentissage de la marche
Posté par
sur 04 mai 2016 - 06:07
dans
Intelligence artificielle
Salut,
J'utilise ces briques lego pour faciliter le montage/démontage et pouvoir les réutiliser sans problèmes. Je suis encore dans ma "phase" d'apprentissage en robotique donc je ne cherche pas à avoir les meilleurs rendements ou une haute résistance pour le moment. J'ai déjà eu l'occasion de programmer et de monter un robot en mindstorm, mais le système lego ne m'a pas autant plu que celui d'arduino, et de toute façon les mindstorms et NXT ne sont pas dans mon budget ^^.
Merci quand même pour ton lien, je ne savais pas que c'était possible, je le garde sous le coude au cas où j'utiliserai à nouveau des mindstorms
#69700 Crawling Robot ou l'apprentissage de la marche
Posté par
sur 04 mai 2016 - 04:26
dans
Intelligence artificielle
Après avoir lu les sujets de cette catégorie, j'ai souhaité en savoir plus sur l'apprentissage automatisé et notamment sur l'Apprentissage par renforcement et l'utilisation de l'ago QLearning.
Puis j'ai trouver sur Youtube des "crawling robot" (je sais pas si c'est vraiment ce nom), qui sont de petits robot qui doivent "apprendre" à avancer à l'aide de 2 servos et d'un algo :
Je me suis dit que ces robots seraient suffisamment abordable pour une première expérience en IA et j'ai voulu en créer un moi-même avec mes quelques (maigres) connaissances en Arduino (et quelques bases de Python mais surtout essayer en Arduino).
J'ai commencer par construire le chassis en briques LEGO, fixé l'Arduino UNO, les 2 servo (SG90) et la plaque de test. Il me manque plus qu'un capteur pour mesurer la distance parcourue pour finir le montage. J'hésite actuellement entre un capteur d'effet de Hall et un capteur à ultrasons (ou une roue codeuse). Le tout pour 350g à la balance.
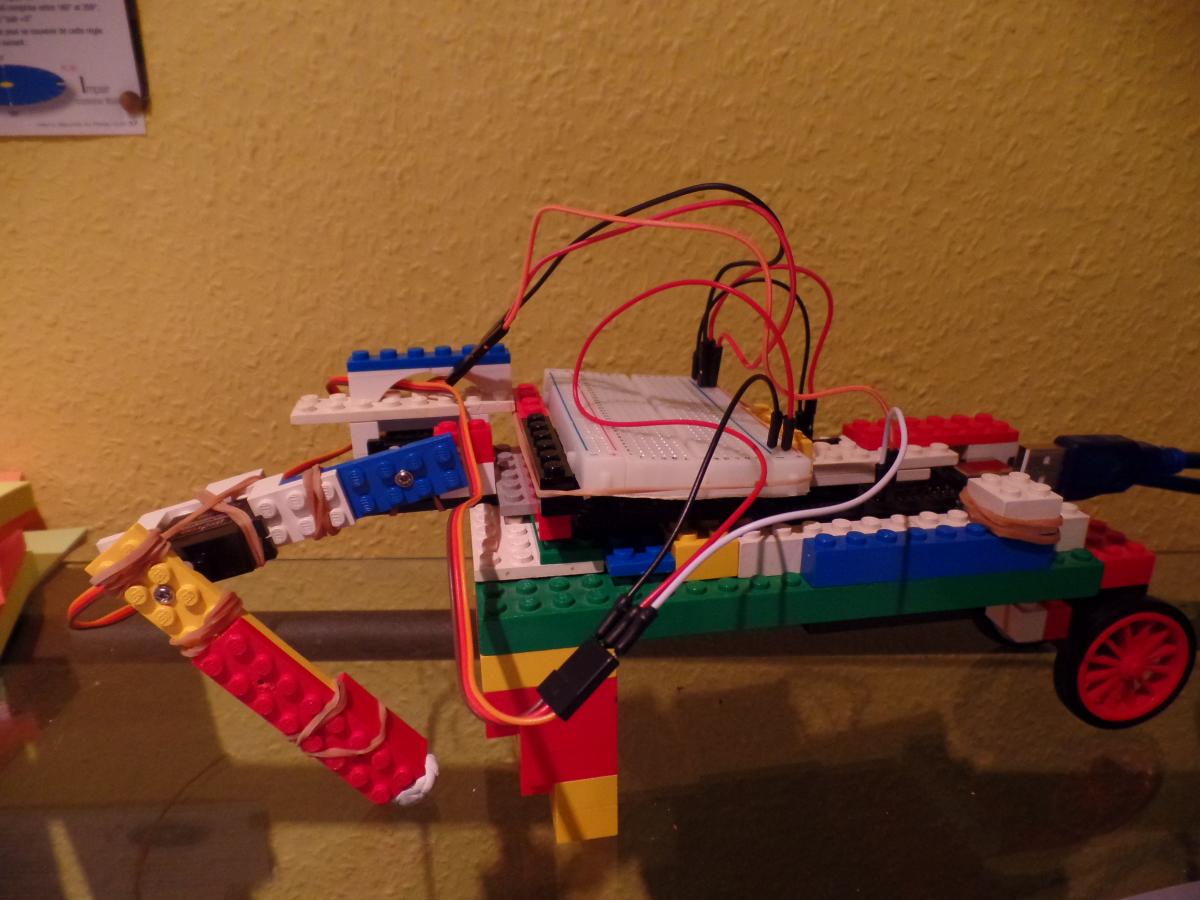
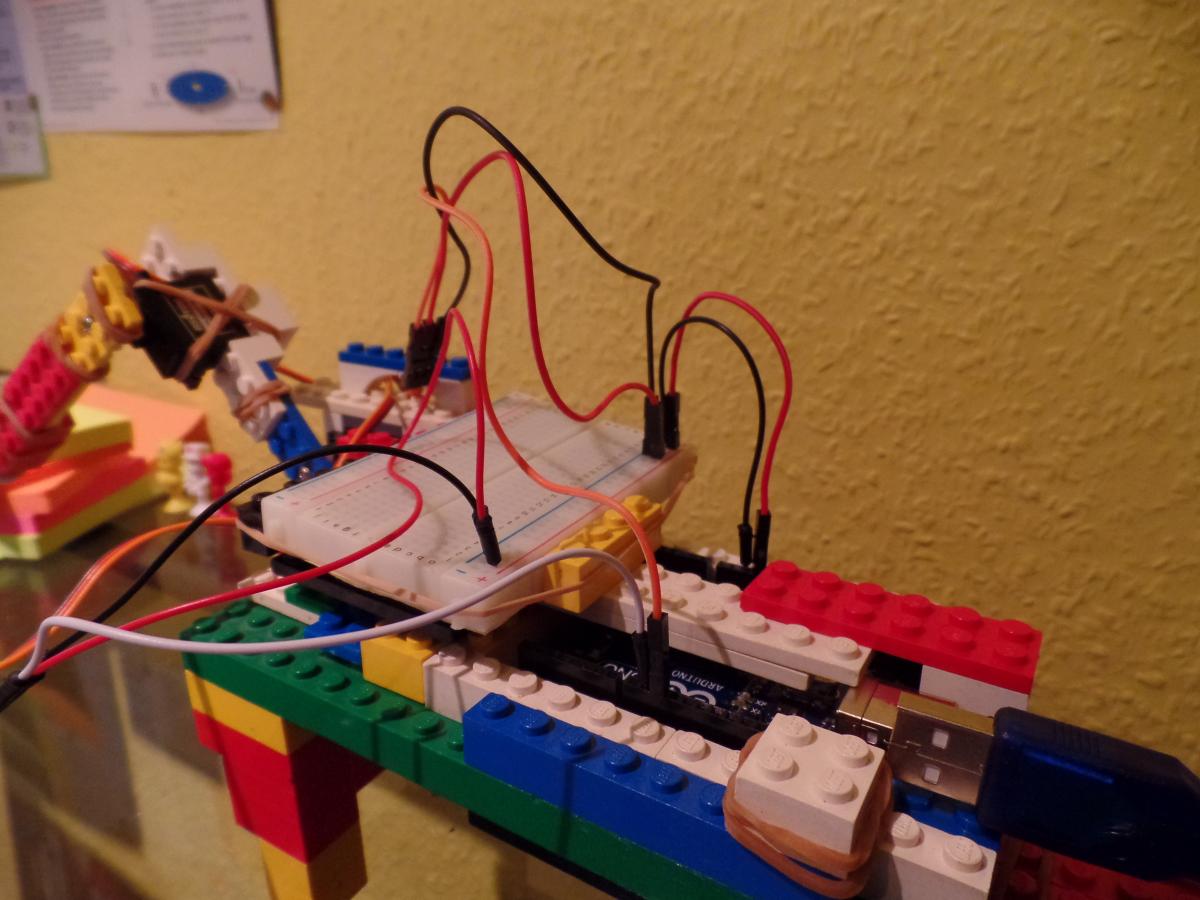
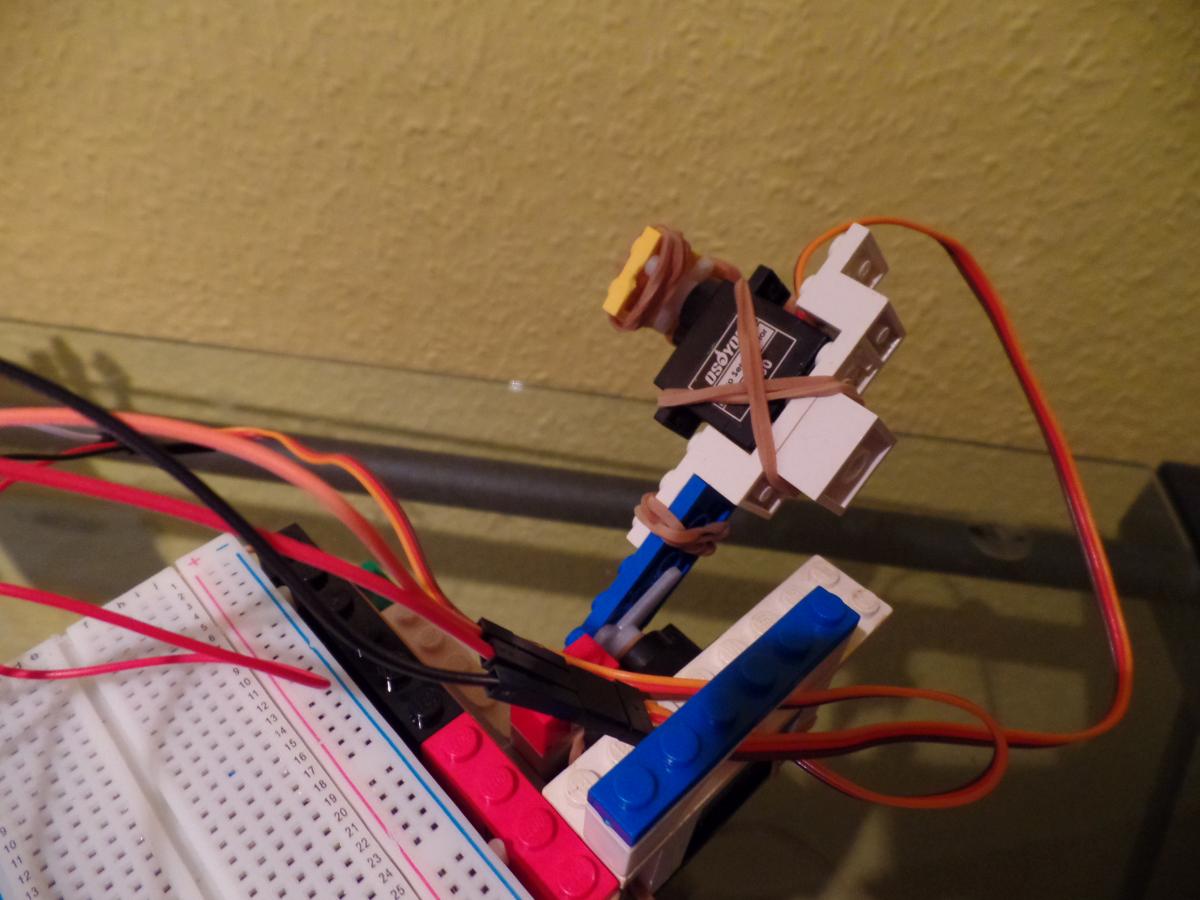
(vive les élastiques ^^)
En cherchant un peu des infos sur l'algo Q-Learning, j'ai trouver ces pages-ci :
- https://fr.wikipedia...wiki/Q-Learning
- http://www.michaelang.com/project/sisyphus
- http://mnemstudio.org/path-finding-q-learning-tutorial.htm
- http://blog.octo.com/apprentissage-par-renforcement-de-la-theorie-a-la-pratique/
- https://www.cs.rhul..../new_thesis.pdf
- https://drive.google...QdTg/view?pli=1
En attendant d'avoir le capteur pour mesurer la distance parcourue, j'aurais souhaiter simuler l'algo sur mon pc. J'ai trouver le logiciel Gazebo qui à l'air de pouvoir le faire mais si vous avez des suggestions de logiciel de simulation (Windows ou Linux), de préférence gratuit, je suis preneur
. J'ai aussi vu V-rep, mais il a l'air d'être moins documenté.Donc voici mes premiers objectifs :
- Comprendre le code du dernier lien et comment il a fait pour en arriver la depuis la formule de wikipédia (celle-ci)
- L'essayer dans une simulation ou en vrai
- Tenter de reproduire moi-même le programme
Puis lorsque que j'aurais réussi à faire ceci :
- Ajouter des servos
- Ajouter des capteurs
Et pourquoi pas le rendre bipède (mais c'est pas pour tout de suite ça)
Donc voilà, je viens vers vous pour vous demander: si je ne vise pas trop haut (que cela soit en math/algo, programmation) ?
Si je part dans la bonne direction en essayant de lui apprendre à marcher avec l'apprentissage par renforcement et QLearning (es-ce-qu'il existe un autre procédé plus simple ?)
Quel est le capteur à privilégié dans ce type de situation ?
Il y a-t-il des bibliothèques arduino capable d'aider dans ce genre de programme ? (que pensez-vous de celle-ci)
Connaissez-vous un logiciel de simulation plutôt simple et efficace ?
Es-ce qu'il serait "mieux" de créer l'algo en python et de faire communiquer le pc avec l'Arduino ?
(désolé de vous harceler avec autant de questions ^^)
Et si vous avez d'autres conseils pour quelqu'un qui souhaite débuter dans le monde de l'IA, n'hésitez pas !
Image(s) jointe(s)
#68459 Présentation
Posté par
sur 02 avril 2016 - 10:01
dans
Et si vous vous présentiez?
Merci
Si tu as des précisions/corrections n'hésites pas.
#68429 Présentation
Posté par
sur 01 avril 2016 - 10:06
dans
Et si vous vous présentiez?
Merci :)
Pour les tutos je, vais attendre d'avoir suffisamment de connaissances pour en faire des complets, en attendant, j'écris des billets ici, j'essaye de partir de zéro et d'expliquer du mieux que je le peut. Si vous pensez qu'une des notions pourrait être adaptée pour un tutoriel, pourquoi pas :)
#68060 Mise en place d'une boutique en ligne sur robot maker?
Posté par
sur 18 mars 2016 - 12:09
dans
Les annonces Robot Maker
ça je sais que la doc officielle Arduino le fera très bien. Maintenant si dans le kit moins cher je sais que j'ai une doc travaillée à l'intérieur ou au moins des tutos clairs dédiés à ce kit tous accessible au même endroit (que je n'ai pas à fouiller dans les différentes catégories pour m'y retrouver) pourquoi pas la copie...
Au pire pourquoi ne pas dédier un forum à ce produit si il est présenté en boutique avec les questions de ceux qui ne l'auront pas encore acheté et les expériences de ceux qui l'auront déjà acheté... à voir...
C'est une bonne idée de créer une sorte de doc/aide pour chaque kit, ça permettrait aux personnes qui l'achète de savoir quoi faire (ou non) avec.
Je me permets d'ajouter quelques composants à la liste qui peuvent être utiles :
- L293D pour le contrôle des moteurs CC (je ne sais pas si vous les incluez avec les drivers moteurs CC)
- Modules de communication sans-fil Bluetooth (HC06 par exemple) ou wifi (ESP8266 par ex)
- Peu être peu utilisé, mais un FTDI
#67994 Présentation
Posté par
sur 16 mars 2016 - 10:27
dans
Et si vous vous présentiez?
Hello 
Après cette "blague" ridicule voici ma petite présentation originale (ha bah non en fait)
Mon pseudo est Jekert je suis en première filière Sciences de l'Ingénieure. Je m'intéresse beaucoup aux nouvelles technologies, j'ai découvert Arduino il y a peu de temps, et j'ai commencer à zyeuter l'impression 3D, etc...
Je vous avez prévenus que ça allait être original 
Voilà voilà.





{kind=link}
{kind=link}
{kind=link}