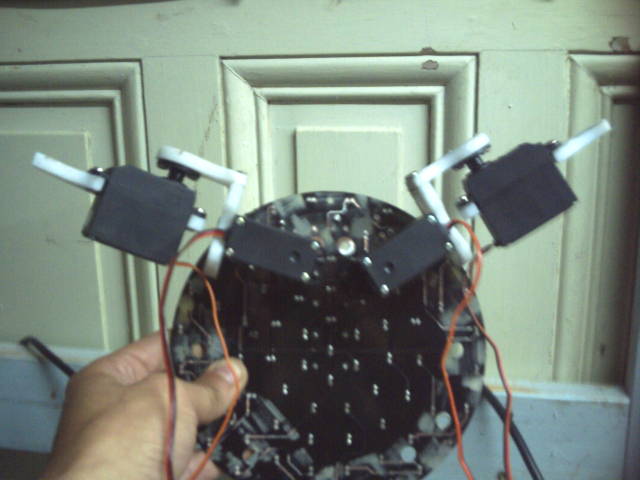
a part ça, les 6 pattes sont assemblées et montées, et voila 2 photos !
@bientot pour la suite des réjouissances

Il y a 63 élément(s) pour eihis (recherche limitée depuis 14-mai 13)
 Posté par
sur 08 septembre 2009 - 01:38
dans
Robots mixtes / hybride
Posté par
sur 08 septembre 2009 - 01:38
dans
Robots mixtes / hybride


Posté par
sur 09 septembre 2009 - 01:44
dans
Robots mixtes / hybride
... en faisant des test en comparant les S3003 de futaba et les modelcraft je me suis aperçu que les modelcrafts consommaient plus. Lors d'un déplacement demandant du couple les futaba montaient à environ 500mA (de mémoire) en pic et les modelcraft à presque le double. A voir pour l'autonomie du robot, c'est toujours bon à savoir.
Posté par
sur 09 septembre 2009 - 04:22
dans
Robots mixtes / hybride
Posté par
sur 10 septembre 2009 - 03:45
dans
Robots mixtes / hybride
) :
Posté par
sur 08 septembre 2009 - 09:08
dans
Robots mixtes / hybride
Posté par
sur 07 septembre 2009 - 01:53
dans
Robots mixtes / hybride
Posté par
sur 03 septembre 2009 - 03:37
dans
Robots mixtes / hybride
Posté par
sur 03 septembre 2009 - 11:21
dans
Robots mixtes / hybride
Posté par
sur 04 septembre 2009 - 02:27
dans
Robots mixtes / hybride




Posté par
sur 06 septembre 2009 - 04:36
dans
Robots mixtes / hybride
. question servo, je n'ai pas trouvé moins cher ailleurs. et j'en suis content.
Posté par
sur 05 septembre 2009 - 02:35
dans
Robots mixtes / hybride
Posté par
sur 12 août 2010 - 09:12
dans
Electronique
Posté par
sur 11 août 2010 - 04:12
dans
Electronique

Posté par
sur 10 septembre 2009 - 03:53
dans
Et si vous vous présentiez?

Posté par
sur 14 décembre 2009 - 11:46
dans
Drone, Robot volant, et autres machines volantes
Posté par
sur 11 décembre 2012 - 02:09
dans
Reventes, matériel d'occasion, récup
Posté par
sur 22 janvier 2011 - 12:04
dans
Electronique
Posté par
sur 09 juillet 2010 - 11:54
dans
Electronique
Posté par
sur 12 décembre 2012 - 10:11
dans
Reventes, matériel d'occasion, récup
Posté par
sur 09 juillet 2010 - 12:46
dans
Electronique
Merci ça servira sûrement
Peut-être que je demande trop mais une version en français et à télécharger serait peut-être utile qu'en pense-tu ?
)/
Posté par
sur 10 juillet 2010 - 08:54
dans
Electronique
 zip_servodrive.zip 3,56 Mo
183 téléchargement(s)
zip_servodrive.zip 3,56 Mo
183 téléchargement(s)
Posté par
sur 11 décembre 2012 - 10:45
dans
Reventes, matériel d'occasion, récup
Posté par
sur 03 janvier 2010 - 10:06
dans
Electronique
Posté par
sur 13 juillet 2010 - 11:11
dans
Programmation
Posté par
sur 03 septembre 2009 - 03:15
dans
Electronique




