Posté par
Posté par
Salut,
Tu pourrais t'étendre un peut plus sur la partie programmation, le langage que tu envisage ? les outils de développement... parce que d'après ce que j'ai compris la partie électronique à bien avancé !
Salut!Je suis encore loin d'être un pro avec la raspberry pi
/>/>/> Je ne fais que commencer
Mais je sais pas si je vais avoir le temps de faire ce que je veux ce week end x)
Trop de projets et je n'ai du temps que en dehors des heures 9H 12H30 et 14H 18H ... Heureusement que je dors peut pour que tout avance un peu ^^
Déjà désolé de ne pas avoir beaucoup parcipé, et je crais d'avoir peu de temps libre pour faire quelquechose de serieux!
Toutefois, j'ai des Raspberry Pi (6 ou 7 modèles B, et 2 modèles A), un module caméra, et tout plein de petits composants annexes.
Donc si vous avez des tests à faire sur du matos que vous n'avez pas, faites le moi savoi
 />/>
/>/>Pour la programmation, ça se programme en C/C++, mais aussi en python, java, en fait ce que vous voulez, car les GPIO sont en fait des fichiers.
Il suffit alors d'y accéder pour modifier/lire la valeur, donc à priori tout langage de programmation gérant les fichiers est utilisables.
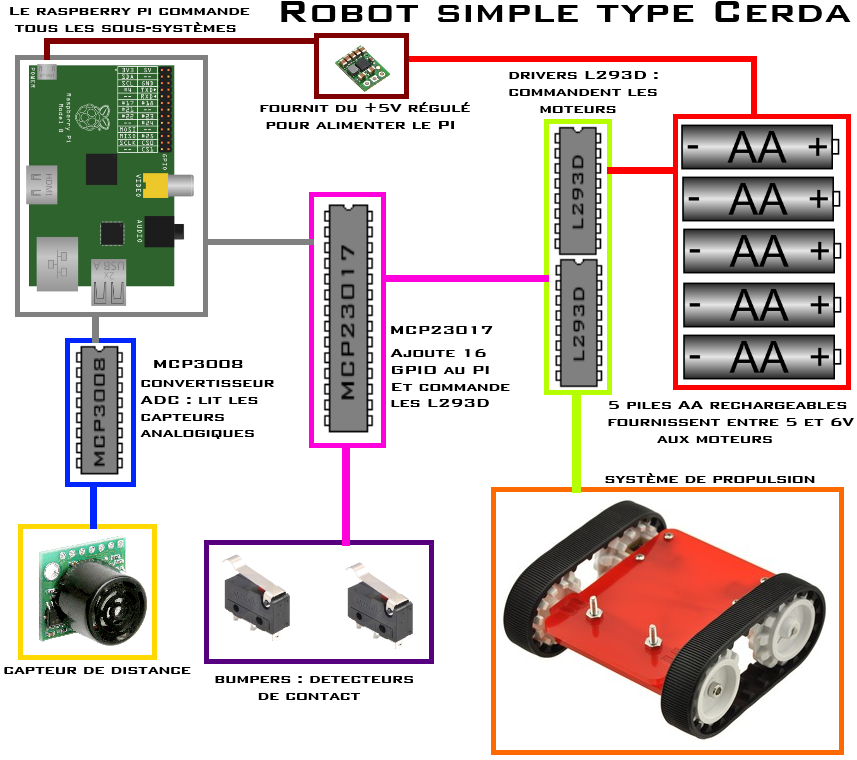
Sur mon robot Raspberry Pi, j'ai fait l'essentiel du code en python, mais j'ai des bouts de C, et j'ai une interface PHP qui permet
de faire avancer, reculer, ou tourner le robot. On peut aussi lancer le mode exploration automatique. Le robot streame un flux vidéo webcam
(c'est possible avec le module camera égamement, mais comme le module camera est de qualité très supérieure, 5Mpixels en photo et full HD 30FPS
en video, je le garde pour des applications d'imagerie. J'en ai un seul pour le moment et il n'est pas facile à trouver).
Au passage, avec un système à jour, la carte SD d'un modèle B est interchangeable avec la carte SD d'un modèle A.
Le modèle A n'a que 256 de ram au lieu de 512, un seul USB, et pas de port réseau, mais du coup il consomme presque moitié moins.
J'ai upgradé mon robot (R.cerda) avec le modèle A sans le moindre souci, et du coup j'ai pu utiliser une batterie LiIon avec un
régulateur step up plutôt que de devoir faire du step down, ce qui aurait requis deux batteries LiIon en série, ou une 2S.
En bref, on peut réellement faire les développements pour un pi modèle B, et le remplacer par un modèle A à la dernière minute,
ça rentre parfaitement. Le contraire n'est pas forcément vrai, car il y a le port ethernet en plus sur le modèle B, et la conso plus élevée.
Je rappelle les specs : 700mA pour le B, 400mA pour le A.
PS : ce que j'ai dit pour "transferer la carte SD d'un modèle B à un modèle A" est sans doute valable pour la plupart des OS adaptés
au pi, mais moi je n'ai testé qu'avec Raspbian!
Bon courage pour la suite, et bravo pour tout le travail abattu, je vois plein de beaux circuits, et surtout les détails sont réellement peaufinés!
Au passage, je suis tombé sur ce LCD, qui est réellement minuscule, non rétro-éclairé, mais consommant très peu (2mA), ne coute pas cher (je l'ai eu pour environ 5€). ça peut servir de module d'affichage de diagnostic/affichage de certaines infos. Je dis ça, parceque avec un pi "headless", par le réseau, parfois on galère à trouver l'IP de la machine, ou on a envie de savoir une info
sans pour autant vouloir se loguer en SSH (bon, vous me direz sur le mien j'ai mis une interface web. Mais ça requiert quand même un ordinateur pour y acceder) On peut aussi afficher l'état de la batterie, les capteurs pour le debug, enfin tout un tas de trucs utiles...En fin de compte ça consomme moins qu'une LED, tout en étant plus précis...
Bref, un petit LCD de ce genre peut être pratique; d'autant plus si on ajoute une puce derrière (moi j'aurais mis un attiny2313, mais mike118 pourra sans doute faire la même chose avec un pic minimal moins cher!
Du coup ça permettrait d'avoir un composant fonctionnant en I²C, pourquoi pas avec une adresse réglable par jumpers, consommant peu, et qu'on pourrait couper, qui afficherait des trucs. Et éventuellement, avec 2-3 boutons, on pourrait même faire une petite interface, qui permettrait de lancer tel ou tel programme, configurer l'IP, activer/désactiver le wifi, etc...
Dernier point, je vais essayer de nettoyer/commenter le code dont je dispose pour le mettre dans un coin de la dropbox, si ça peut servir. La plupart du temps, le code est disponible sur des depots github de toutes façons.
Je mettrai :
-le code du robot
-un code de gestion de LCD
-le code du service qui permet de lancer un truc automatiquement au boot (ou de le lancer avec nomService start, de l'arrêter avec nomService stop). C'est pas encore parfait, mais ça fonctionne, et ça permet de lancer une commande sans acceder au shell, mais également de lancer une commande qui continue même si on quitte le shell.
Pour l'instant, je dois aujourd'hui avancer sur un article, alors j'y retourne
Bon courage les gars!