Bonjour à tous,
L'idée et l'initiave de mike118 est excelente.
Je vous rejoints dans l'ensemble de vos posts et j'en tire le constat suivant: un projet robotique est complexe car il necessite énormement de compétences différentes qu'une seule personne ne peut pas avoir ce qui impose un minimum de coordination, de partage et de communication.
J'ai lu que quelqu'un proposait skype, je suis pour. Dropbox code/info, je suis pour aussi. Organisation forun, idem. Je rajouterai pour les doc type besoin et spec/design technique, google doc, qui permet de faire de l'édition de doc en parallèle.
Ensuite je vous propose qu'on voit ensemble qui travaille sur tel ou tel élements et/ou partie logicielle du robot et qu'on definisse ensemble les interfaces meca, HW et SW, pour faire en sorte que tout couche ensemble.
On peut commencer par exemple par un robot à rouse en le pensant évolutif pour lui mettre des pattes par la suite.
J'aimerais bien également, pouvoir monter l'interalité du robot chez moi (c'est très motivant de concretiser). A ce moment là, on pourrait trouver un moyen de se fournir les éléments qu'on réalise aux autres membres actifs (moyennant de payer les pièces meca/HW bien entendu).
Je propose qu'on se fasse un skype, mais avant cela un ordre du jour pour preparer notre réunion pour éviter de se disperser. Déjà se connaitre et se présenter oralement serait un bon début.
Pour info, j'ai 40ans, je suis passioné de robotique depuis tout petit après avoir lu les livres d'Isaac Asimoc, j'ai participé 2 fois à la coupe E=M6 pendant mes études et depuis je fais des robots à la maison quand j'ai le temps. Je suis ingénieur Aeronautique (fr.linkedin.com/pub/stéphane-lelievre/12/22b/41a/).
Je pense que la techno est prete et je pense qu'en groupe on pourrait faire un truc super. Ce qui fait égélement la force d'un groupe c'est la différence d'age, de competences et d'expérience. On fait ca par passion, pour le plaisir, pour apprendre...
Je suis toujours 200% partant. Je peux aider coté soft (asservissement/controle moteur - acuisition capteur) et surtout coté organisationnel.
A++
Steph
Contenu de ilels
Il y a 39 élément(s) pour ilels (recherche limitée depuis 20-mai 13)
Par type de contenu
Voir pour ce membre
#60332 Un robot collectif, le robot des robot-makers
 Posté par
sur 27 mars 2014 - 09:32
dans
Robotique ludique, robotique insolite
Posté par
sur 27 mars 2014 - 09:32
dans
Robotique ludique, robotique insolite
#60491 Un robot collectif, le robot des robot-makers
Posté par
sur 08 avril 2014 - 06:16
dans
Robotique ludique, robotique insolite
Bonjour,
un petit doodle ? http://doodle.com/243i5ddvvxufkgiu
Stephane
un petit doodle ? http://doodle.com/243i5ddvvxufkgiu
Stephane
Je suis d'accord qu'on recrute tous les motivés, mais connaître un minimum le background genre : " j'ai déjà fais quelque robots" " j'ai déjà fais un robot" ou " je suis complètement novice et je viens pour apprendre mais à la base je suis artiste " ça peut être bien de le savoir ... après on peut supprimer ce point de la présentation ou il ne peut être qu'optionnel =)
Ensuite c'est vrai qu'il est peut être judicieux d'échanger les points 2 et 3 ! =) d'abord étudier le brain storming et ensuite voir comment on peut s'organiser ! =)
d'autres suggestion ?
Et une nouvelle suggestion de date de rendez vous sur skype ?
#60551 Un robot collectif, le robot des robot-makers
Posté par
sur 15 avril 2014 - 06:43
dans
Robotique ludique, robotique insolite
Suite au sondage le vendredi 18 à 20h30 est retenu.
mike118, on t'envoie nos id skype et mail respectifs, tu te charges de nous appeler avec Skype à l'heure dite ?
Et bien sur sur ceux qui n'ont pas pu répondre au sondage peuvent faire de même
Bonne soirée
mike118, on t'envoie nos id skype et mail respectifs, tu te charges de nous appeler avec Skype à l'heure dite ?
Et bien sur sur ceux qui n'ont pas pu répondre au sondage peuvent faire de même
Bonne soirée
#58684 Un robot collectif, le robot des robot-makers
Posté par
sur 12 décembre 2013 - 09:19
dans
Robotique ludique, robotique insolite
Bonjour,
je suis interessé moi aussi! Ou en est votre collaboration ?
Pour ma part, je ne pourrai pas aider coté meca, je pourrai eventuellement donner des avis coté electronique, par contre coté prog, pas de problème, c'est mon metier.
Je suis passionné de robotique
Comment vous rejoindre ?
A++
je suis interessé moi aussi! Ou en est votre collaboration ?
Pour ma part, je ne pourrai pas aider coté meca, je pourrai eventuellement donner des avis coté electronique, par contre coté prog, pas de problème, c'est mon metier.
Je suis passionné de robotique
Comment vous rejoindre ?
A++
#38929 supprime
Posté par
sur 22 février 2012 - 01:58
dans
Robots à pattes et jambes, humanoïdes, bipèdes, quadrupèdes, hexapodes ...
Quelles sont les nouvelles, as-tu réussit à progresser dans ton projet ? des nouvelles photos ?bonjour a tous
je suis en train de creer un robot biped du style romeo
j ai fabriquer les 2 jambes avec les articulations
j ai vu sur le forum de motoriser en low cost avec des moteurs de perceuses
j ai besoin d aide a savoir comment faire pour les poulies et les couroies
j ai l intension de mettre un ordi pc dans le corp
comment mettre des photo pour vous montrer
contact ambroise@neuf.fr
tous conseilles sont bien venues
#17616 Simulation avec Blender
Posté par
sur 02 août 2010 - 07:59
dans
Robots à pattes et jambes, humanoïdes, bipèdes, quadrupèdes, hexapodes ...
En faisant quelques recherches j'ai cru comprendre qu'il y avait un couplage possible avec python ... heum c'est cool ça! je continue...
#17611 Simulation avec Blender
Posté par
sur 02 août 2010 - 05:16
dans
Robots à pattes et jambes, humanoïdes, bipèdes, quadrupèdes, hexapodes ...
Bonjour,
A vous lire, je me demande finalement pourquoi on ne fait pas plus de simulation pour la marche d'un robot bipède! On fait des simu pour tout, dans le nucléaire, l'aéronautique etc... mais j'ai pas vu grand chose coté robotique finalement. Avant de se lancer dans la méca ça peut aider!
D'où mes questions:
- Avez vous déjà lu des articles à ce sujet ?
- Quelqu'un s'y est-il déjà frotté ? retour d'expérience ?
- Qui connaît Blender 3D et le module Bullet ? Peut-on faire des choses qui nous serait utilise avec ? (je vais creuser aussi de mon coté ) - ou autres 3DSmas et consorts
A+
A vous lire, je me demande finalement pourquoi on ne fait pas plus de simulation pour la marche d'un robot bipède! On fait des simu pour tout, dans le nucléaire, l'aéronautique etc... mais j'ai pas vu grand chose coté robotique finalement. Avant de se lancer dans la méca ça peut aider!
D'où mes questions:
- Avez vous déjà lu des articles à ce sujet ?
- Quelqu'un s'y est-il déjà frotté ? retour d'expérience ?
- Qui connaît Blender 3D et le module Bullet ? Peut-on faire des choses qui nous serait utilise avec ? (je vais creuser aussi de mon coté
) - ou autres 3DSmas et consortsA+
#17615 Simulation avec Blender
Posté par
sur 02 août 2010 - 07:44
dans
Robots à pattes et jambes, humanoïdes, bipèdes, quadrupèdes, hexapodes ...
Merci Dr Calvin pour la reponse
Je mettrais quand même un petit bemol à ces deux arguments. Si 1 et 2 sont vrais (en plus c'est bcp + sympa qu'en RV), 1 et 2 coutent chers
Avec une bonne simu, on peut déjà faire beaucoup de choses avant de debourser le moindre euro (si on utilise des soft open-source et qu'on ne compte pas les heures)
Après je crois que tu as raison (je ne sais pas si on se tutoie sur ce forum? ) je crains que Blender ne permette pas de tester le robot modélisé. Je vais creuser un peu plus par curiosité et aller voir le lien que tu proposes (merci )
Thot, je n'avais jamais vu ce robot, il a l'air assez recent. Merci pour le lien!
Je suis à fond pratique moi aussi. Mais admettons qu'on veuille tester un algo de marche dynamique, en fonction de differents capteurs, actionneurs etc..., s'il faut à chaque fois fabriquer ou customiser le robot (ajout/modif, sans compter la casse) ca va prendre du temps (surtout moi qui ne suis pas un AS de la meca!)
Avec la simu, on peut même injecter des données issues de la réalité, faire de la reconf, changer un système par un autre, regler la repartition des masses, etc...
Je pense que c'est complémentaire. Dommage de se priver de la puissance des outils de simu.
Je mettrais quand même un petit bemol à ces deux arguments. Si 1 et 2 sont vrais (en plus c'est bcp + sympa qu'en RV), 1 et 2 coutent chers
Avec une bonne simu, on peut déjà faire beaucoup de choses avant de debourser le moindre euro (si on utilise des soft open-source et qu'on ne compte pas les heures)
Après je crois que tu as raison (je ne sais pas si on se tutoie sur ce forum?
) je crains que Blender ne permette pas de tester le robot modélisé. Je vais creuser un peu plus par curiosité et aller voir le lien que tu proposes (merci )Thot, je n'avais jamais vu ce robot, il a l'air assez recent. Merci pour le lien!
Je suis à fond pratique moi aussi. Mais admettons qu'on veuille tester un algo de marche dynamique, en fonction de differents capteurs, actionneurs etc..., s'il faut à chaque fois fabriquer ou customiser le robot (ajout/modif, sans compter la casse) ca va prendre du temps (surtout moi qui ne suis pas un AS de la meca!)
Avec la simu, on peut même injecter des données issues de la réalité, faire de la reconf, changer un système par un autre, regler la repartition des masses, etc...
Je pense que c'est complémentaire. Dommage de se priver de la puissance des outils de simu.
#17707 Simulation avec Blender
Posté par
sur 08 août 2010 - 10:40
dans
Robots à pattes et jambes, humanoïdes, bipèdes, quadrupèdes, hexapodes ...
Merci Léon,
(Les pauvres, ce sont des manchots ! On a pas le droits de faire ça)
J'ai commandé un livre sur Blender, je vais m'y mettre... Comme je connais bien python, je vais faire des essais pour piloter les axes et virtualiser les capteurs.
Peut-être pourrai-je posté des vidéos fin septembre (vacances + quelques bonnes heures de travail)
J'ai un copain qui va m'aider, c'est un big job de repartir de 0!
Mais je veux explorer Blender car on peut le coupler avec python, et là, les perspectives sont carrément immenses
Bon week-end
Steph
(Les pauvres, ce sont des manchots ! On a pas le droits de faire ça
)J'ai commandé un livre sur Blender, je vais m'y mettre... Comme je connais bien python, je vais faire des essais pour piloter les axes et virtualiser les capteurs.
Peut-être pourrai-je posté des vidéos fin septembre (vacances + quelques bonnes heures de travail)
J'ai un copain qui va m'aider, c'est un big job de repartir de 0!
Mais je veux explorer Blender car on peut le coupler avec python, et là, les perspectives sont carrément immenses
Bon week-end
Steph
#38309 Simulation avec Blender
Posté par
sur 25 janvier 2012 - 01:13
dans
Robots à pattes et jambes, humanoïdes, bipèdes, quadrupèdes, hexapodes ...
Léon, où en es-tu de BOB5 ?
#38901 Simulation avec Blender
Posté par
sur 21 février 2012 - 03:44
dans
Robots à pattes et jambes, humanoïdes, bipèdes, quadrupèdes, hexapodes ...
C'est marrant, je m'étais renseigné sur ce sujet il y a qqles temps. Merci pour ta réponse et bonne continuation. Préviens nous quand tu remets le pied dans la robotique. On pourra éventuellement travailler ensemble...Pour l'instant, je quitte temporairement la robotique. J'observe ce qu'il se passe, et c'est tout. Je reviendrais certainement à BOB5 plus tard, dans quelques mois ou quelques années.
Pour être précis, je bosse en ce moment pour la communauté radioamateur, avec comme idée contribuer à développer des solutions simples pour faire de la TV numérique (émission radio bien sur), voire des réseaux de donnée haut débit radio (longue distance). Bref, un tout autre domaine. Il faut bien se diversifier un peu!
Leon.
Je suis en observation depuis plusieurs années, j'attends le bon moment moi aussi
#21084 Simulation avec Blender
Posté par
sur 21 juin 2011 - 10:27
dans
Robots à pattes et jambes, humanoïdes, bipèdes, quadrupèdes, hexapodes ...
Bonjour Léon,
Je suis ce fil de temps en temps et je suis toujours dans la réflexion. Je n'ai pas eu le temps d'acquérir les compétences 3D blender jusqu'à présent (ce qui avait été signalé comme point dur sur un post précédent). Je continue de prendre des notes et de garder contact avec des passionné(e)s.
Je me demande souvent s'il faut vouloir calculer des coordonnées 3D exactes des pieds ou autres pour la marche. J'opterais bien pour une programmation de base de la marche, en fonction du poids, vitesse etc... qui assure au moins 4-5 pas (avant de tomber). Sur cette prog de base, je ferais une adaptation des mouvements en fonction de l'inertie du système. L'inertie permet de calculer par anticipation (disons 1 sec?) le comportement du système et nous permettre compenser les dérives avant qu'elles n'arrivent et ne deviennent incontrôlables. On resterait instable mais sous contrôle.
Quelqu'un serait partant pour faire un bipède 3D super simple sous blender qu'on pourrait se partager pour faire nos essais d'algos ? (je suis adepte du python ) et surtout j'imagine un portage rapide sur la FOX
La premiere étape serait de faire un bipède avec x degrés de liberté, lancer le moteur et voir comment il tombe, on verra après comment on peut lui apprendre à bien tomber et ensuite l'empêcher de tomber (là il faudra créer des capteurs virtuels)
Bonne soirée
PS: Mon IM yahoo est sleli
Je suis ce fil de temps en temps et je suis toujours dans la réflexion. Je n'ai pas eu le temps d'acquérir les compétences 3D blender jusqu'à présent (ce qui avait été signalé comme point dur sur un post précédent). Je continue de prendre des notes et de garder contact avec des passionné(e)s.
Je me demande souvent s'il faut vouloir calculer des coordonnées 3D exactes des pieds ou autres pour la marche. J'opterais bien pour une programmation de base de la marche, en fonction du poids, vitesse etc... qui assure au moins 4-5 pas (avant de tomber). Sur cette prog de base, je ferais une adaptation des mouvements en fonction de l'inertie du système. L'inertie permet de calculer par anticipation (disons 1 sec?) le comportement du système et nous permettre compenser les dérives avant qu'elles n'arrivent et ne deviennent incontrôlables. On resterait instable mais sous contrôle.
Quelqu'un serait partant pour faire un bipède 3D super simple sous blender qu'on pourrait se partager pour faire nos essais d'algos ? (je suis adepte du python
) et surtout j'imagine un portage rapide sur la FOXLa premiere étape serait de faire un bipède avec x degrés de liberté, lancer le moteur et voir comment il tombe, on verra après comment on peut lui apprendre à bien tomber et ensuite l'empêcher de tomber (là il faudra créer des capteurs virtuels)
Bonne soirée
PS: Mon IM yahoo est sleli
#17994 Simulation avec Blender
Posté par
sur 20 septembre 2010 - 05:21
dans
Robots à pattes et jambes, humanoïdes, bipèdes, quadrupèdes, hexapodes ...
Merci pour le lien sur wikipedia. En fait, j'utilise Blender précisément pour python. Ce qui m'interresse c'est de virtualiser le robot pour appliquer mes algos en python et quand ca marchera (notez le jeu de mot - pour un bipèdeSalut,
Utiliser Blender pour simuler un robot, pourquoi pas ... Mais ça reviens un peu à réinventer la roue ! Il existe un stock de logiciels de simulations de robotique, qui comprennent un moteur physique, des simulateurs pour les capteurs, et même des interfaces de communication. Simulateurs Robot wikipedia
Pour ma part j'ai déjà utilisé Marilou, et c'est à la fois simple et complet. En attendant qu'une version libre vienne le concurrencer ...
Edit : OpenRobot utilise Blender pour le rendu. Comme quoi ton idée étais bonne quand même !
), en théorie, je contruis un vrai robot, et j'utilise le même programme. L'idée c'est de faire de la simu au sens 'test' sur une plateforme representative.Enfin, encore un fois, c'est la théorie. D'ailleurs, j'aime bien cette expression: <<en theorie, il n'y a pas de différence entre théorie et pratique, mais en pratique il y en a.>>
Le truc que je crains c'est aspect temps réel de la simu, je vais bien voir...
@+
#17849 Simulation avec Blender
Posté par
sur 02 septembre 2010 - 09:36
dans
Robots à pattes et jambes, humanoïdes, bipèdes, quadrupèdes, hexapodes ...
Merci pour le lien, c'est sympa de voir l'aspect virtuel et reel connectés ensemble.
De mon coté, j'ai installé Blender et acheté un bouquin. Je me forme sur le soft et après de commencerai quelques expérimentations du même genre.
Je pense que j'utilisarai la FOX G20, le tout en python également
@+
De mon coté, j'ai installé Blender et acheté un bouquin. Je me forme sur le soft et après de commencerai quelques expérimentations du même genre.
Je pense que j'utilisarai la FOX G20, le tout en python également
@+
#19362 Simulation avec Blender
Posté par
sur 15 février 2011 - 09:27
dans
Robots à pattes et jambes, humanoïdes, bipèdes, quadrupèdes, hexapodes ...
Hello,J'ai essayé hier, j'ai pas vraiment réussi le tutorial, mais bon si d'autres personnes connaissent je suis preneur ...
Bonne chance pour la suite.
quel tuto as-tu essayé de faire ?
#58685 Système autonome 1an
Posté par
sur 12 décembre 2013 - 09:41
dans
Energie
Bonjour,
Je pose la question au cas ou certains auraient dejà la reponse...
Je veux faire un système automatique d'ouverture/fermeture d'une chatière à base d'arduino comprenant: un interrupteur magnetique, un capteur de distance et un servo...
... et evidemment une pile.
Et c'est là mon problème, choisir la/les pile(s) et bien les connecter à la carte arduino (choisir laquelle fera la plus l'affaire pour une conso la plus faible possible).
J'ai lu:
http://www.robot-maker.com/index.php?/blog/45/entry-41-tout-ce-que-vous-pourriez-vous-demander-sur-la-consommation-dune-puce-atmega328p-puce-darduino/
et
http://diy-duino.blogspot.fr/2013/04/optimisation-de-la-consommation-dune.html
mais concrètement, je ne suis pas assez calé pour la mise en pratique hardware.
Par exemple, une question parmi tant d'autres que je me pose :
Puis-je brancher directement deux piles AA en serie sur une arduino pro mini 3.3v ?
J'ai déjà fait le proto avec une carte arduino uno mais reliée au secteur, je voudrais maintenant couper le cordon/>/>
Merci pour votre aide
Sleli
Je pose la question au cas ou certains auraient dejà la reponse...
Je veux faire un système automatique d'ouverture/fermeture d'une chatière à base d'arduino comprenant: un interrupteur magnetique, un capteur de distance et un servo...
... et evidemment une pile.
Et c'est là mon problème, choisir la/les pile(s) et bien les connecter à la carte arduino (choisir laquelle fera la plus l'affaire pour une conso la plus faible possible).
J'ai lu:
http://www.robot-maker.com/index.php?/blog/45/entry-41-tout-ce-que-vous-pourriez-vous-demander-sur-la-consommation-dune-puce-atmega328p-puce-darduino/
et
http://diy-duino.blogspot.fr/2013/04/optimisation-de-la-consommation-dune.html
mais concrètement, je ne suis pas assez calé pour la mise en pratique hardware.
Par exemple, une question parmi tant d'autres que je me pose :
Puis-je brancher directement deux piles AA en serie sur une arduino pro mini 3.3v ?
J'ai déjà fait le proto avec une carte arduino uno mais reliée au secteur, je voudrais maintenant couper le cordon
/>/>Merci pour votre aide
Sleli
#58724 Système autonome 1an
Posté par
sur 14 décembre 2013 - 04:49
dans
Energie
mais plus simple est d'acheter les nouvelles cartes pro mini qui fonctionnent en 5 volts.
OK, je pars sur la pro 5v
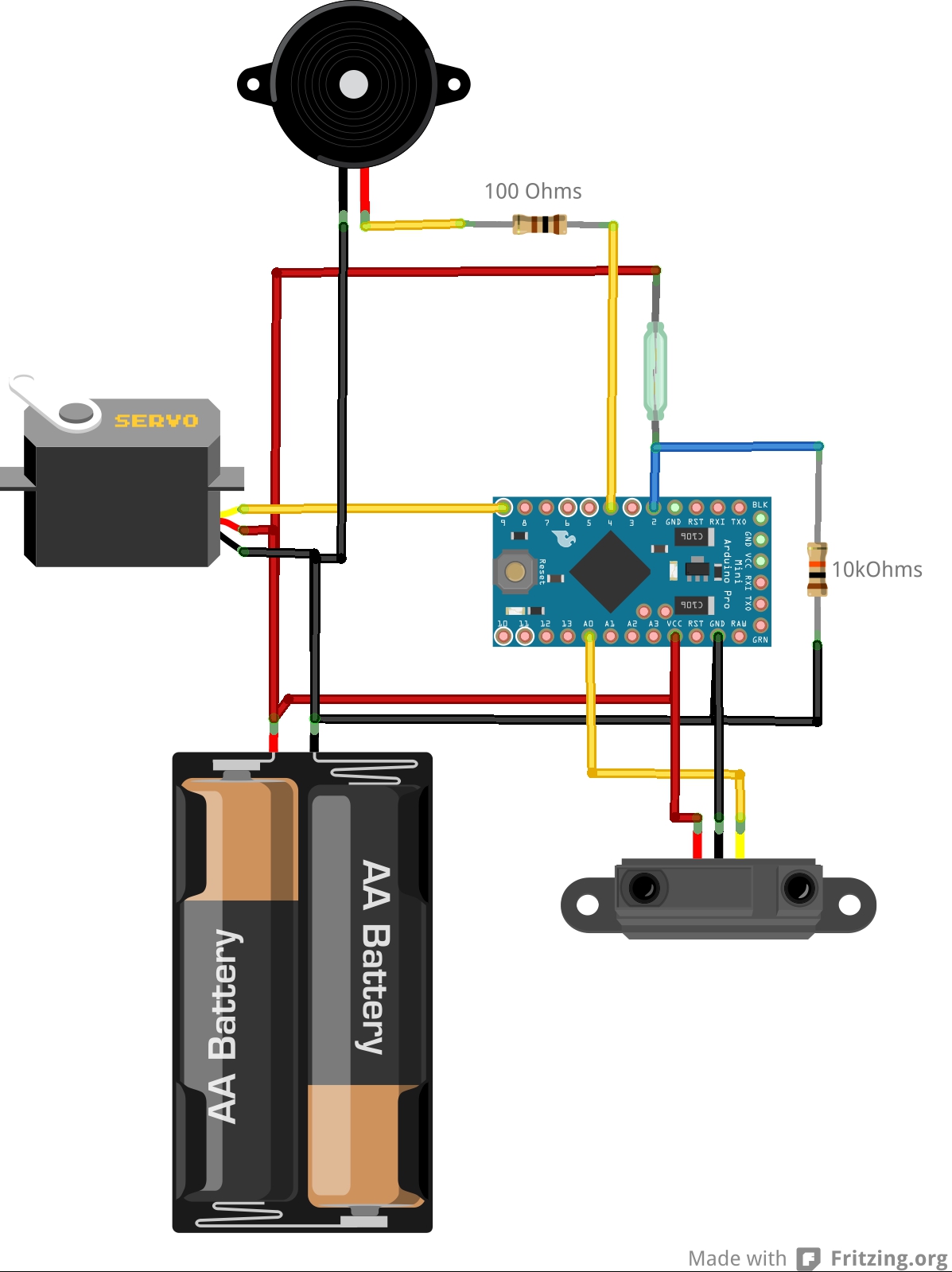
Je joins le schéma fait avec fritzing.
Le principe:
De l'extérieur, le chat est detecté grace au capteur magnetique --> le servo dévérouille la chatière --> le chat entre
De l'intérieur, le chat est detecté grace au capteur de distance --> le servo deverouille la chatière en sortie uniquement --> le chat sort
Le problème reste la consommation totale. Je vais faire des mesures... et essayer d'optimiser tout cela. Je voudrais couper l'alim du servo quand j'en ai pas besoin et trouver un autre moyen de detecter la chat à l'intérieur.
Le buzzer, c'est pour m'envoyer en morse les activités des entrées/sorties du chat dans la journée (il faut juste que je trouve un moyen simple d'activer la transmission).
PS: Pour la petite histoire, il y a un chat qui a cassé la gachette magnétique de ma chatière, du coup je verouille la chatière en sortie uniquement quand mon chat est à la maison. Et ben vous savez quoi, il y en a un qui arrive à tirer vers lui la porte de la chatière pour rentrer (et lui manger toutes ses croquettes! Et quand mon chat est à l'exterieur, il ne peut pas rentrer lui le pauvre. Et si je laisse la chatière ouverte, tous les chats du quartier lui mangent ces croquettes, donc je ferme. Bientôt plus de confort pour mon chat ... à suivre ...
#58698 Système autonome 1an
Posté par
sur 13 décembre 2013 - 12:15
dans
Energie
Merci pour vos reponses
@mike118: Je voudrais vraiment utiliser un arduino, en plus je fais le projet avec mon fils je veux rester dans du grand public abordable.
@ChristianR: On peut éliminer le panneau solaire car je n'ai pas de fenetre dans le cellier
Mais je retiens l'idée de la mesure empirique de la consomation.
D'autres idées / suggestions ?
@mike118: Je voudrais vraiment utiliser un arduino, en plus je fais le projet avec mon fils je veux rester dans du grand public abordable.
@ChristianR: On peut éliminer le panneau solaire car je n'ai pas de fenetre dans le cellier
Mais je retiens l'idée de la mesure empirique de la consomation.
D'autres idées / suggestions ?
#40190 Mesure de courant consommé par un servomoteur
Posté par
sur 23 mars 2012 - 04:57
dans
Electronique
J'aurai bien aimé un truc du genre http://www.robotshop.com/eu/micro-controleur-servo-moteur-pololu.html qui me fournirait en plus la conso des servos ... On peut rêver!
#40099 Mesure de courant consommé par un servomoteur
Posté par
sur 21 mars 2012 - 05:04
dans
Electronique
Bonjour,
Tout est dans le titre!
Quelques précisions du besoin: Je voudrais asservir un servo en position et/ou en "force".
-Pour la position, soit un capteur supplémentaire, soit un servo qui rapporte sa position -> si vous avez des références, je suis preneur
-Pour la force, soit une mesure de courant soit un servo sui rapporte sa conso, et là je sèche...
Merci, @+
Steph
Tout est dans le titre!
Quelques précisions du besoin: Je voudrais asservir un servo en position et/ou en "force".
-Pour la position, soit un capteur supplémentaire, soit un servo qui rapporte sa position -> si vous avez des références, je suis preneur
-Pour la force, soit une mesure de courant soit un servo sui rapporte sa conso, et là je sèche...
Merci, @+
Steph
#40595 Mesure de courant consommé par un servomoteur
Posté par
sur 08 avril 2012 - 11:14
dans
Electronique
Merci pour vos réponses
J'ai regardé l'ACS750 (http://fr.farnell.com/allegro-microsystems/acs756sca-050b-pff-t/ic-current-sensor-50a-3ca/dp/1791390) et le LMD18200 (http://fr.farnell.com/national-semiconductor/lmd18200t/pont-3a-55v/dp/9488030)
Pour mon utilisation actuelle ils sont surdimensionnés ou et dans le cas du LMD trop cher (il m'en faut beaucoup) - je retiens quand même les références, Ca pourrait servir un jour.
J'ai regardé l'ACS750 (http://fr.farnell.com/allegro-microsystems/acs756sca-050b-pff-t/ic-current-sensor-50a-3ca/dp/1791390) et le LMD18200 (http://fr.farnell.com/national-semiconductor/lmd18200t/pont-3a-55v/dp/9488030)
Pour mon utilisation actuelle ils sont surdimensionnés ou et dans le cas du LMD trop cher (il m'en faut beaucoup) - je retiens quand même les références, Ca pourrait servir un jour.
#17591 Stephane de Toulouse
Posté par
sur 29 juillet 2010 - 05:54
dans
Et si vous vous présentiez?
Merci pour votre accueil!
#17541 Stephane de Toulouse
Posté par
sur 25 juillet 2010 - 08:42
dans
Et si vous vous présentiez?
Bonjour à Tous,
Je decouvre ce forum depuis peu et je suis très content de voir de 'vrai' amateurs de robotique qui se posent de bonnes questions et débatent sur différents sujets techniques, physiques voire philosophique liés à la robotique.
Pour me présenter, je dirais que je suis tombé dedans petit, fou l'électronique, d'informatique tjrs très lié à la robotique. J'ai commencé sur un C64 à 14 ans. Super machine
J'ai fait une un IUT GEII puis une ecole d'ingé en elec/info option imagerie numerique. J'ai participé pendant 2 ans à la coupe de robotique E=M6 (ruée vers l'or / basket) - j'ai fait les cartes electriques et programmé une carte de reconnaissance d'images d'un proto d'un chercheur (neurone1)
J'ai 36 ans. Je suis particulièrement l'actualité de robot bipede à taille humaine.
Depuis très longtemps je prends des notes, des idées et essais quelques inventions persos dans l'esport de faire qqle chose avec un jour...
Actuellement je travaille dans le secteur aeronautique sur des systèmes embarqués critiques (surtout du controle/commande, asservisement et reseau)
Pour moi la robotique (humanoide j'entends) c'est une passion et une manière d'utiliser ces robots dans la vie de tous les jours dans differents contexte (pour les aveugles, ds les maisons de retraite, faire des taches que personne de veut faire etc...) et surtout pas pour faire la guerre...
J'espère pourvoir partager tout cela avec vous et pourquoi pas concretiser un projet
Bonne soirée à tous et à bientot sur le forum !
Stephane
Je decouvre ce forum depuis peu et je suis très content de voir de 'vrai' amateurs de robotique qui se posent de bonnes questions et débatent sur différents sujets techniques, physiques voire philosophique liés à la robotique.
Pour me présenter, je dirais que je suis tombé dedans petit, fou l'électronique, d'informatique tjrs très lié à la robotique. J'ai commencé sur un C64 à 14 ans. Super machine
J'ai fait une un IUT GEII puis une ecole d'ingé en elec/info option imagerie numerique. J'ai participé pendant 2 ans à la coupe de robotique E=M6 (ruée vers l'or / basket) - j'ai fait les cartes electriques et programmé une carte de reconnaissance d'images d'un proto d'un chercheur (neurone1)
J'ai 36 ans. Je suis particulièrement l'actualité de robot bipede à taille humaine.
Depuis très longtemps je prends des notes, des idées et essais quelques inventions persos dans l'esport de faire qqle chose avec un jour...
Actuellement je travaille dans le secteur aeronautique sur des systèmes embarqués critiques (surtout du controle/commande, asservisement et reseau)
Pour moi la robotique (humanoide j'entends) c'est une passion et une manière d'utiliser ces robots dans la vie de tous les jours dans differents contexte (pour les aveugles, ds les maisons de retraite, faire des taches que personne de veut faire etc...) et surtout pas pour faire la guerre...
J'espère pourvoir partager tout cela avec vous et pourquoi pas concretiser un projet
Bonne soirée à tous et à bientot sur le forum !
Stephane
#40596 Localisation d'un son par stéréophonie
Posté par
sur 08 avril 2012 - 11:27
dans
Physique et mathématique
Bonjour,
Quelqu'un a t il déjà mis en oeuvre ce type de système a savoir localiser une source sonore à partir de deux microphones ?
J'ai trouvé quelques infos théoriques du genre http://www.phaz.mc/edu/acoustique/localisation.htmlmais en pratique je n'ai rien trouvé de concret (enfin juste une expérience Américaine pour détecter la provenance d'un tir de sniper)
Je voudrais que mon robot se tourne vers cette source sonore où même seulement la détecte en la localisant.
Vos idées / retour d'expérience sont les bienvenues !
Joyeuses Pâques!
#42022 Localisation d'un son par stéréophonie
Posté par
sur 01 mai 2012 - 08:23
dans
Physique et mathématique
Super article ! On devrait pouvoir l'adapter facilement dans un autre langage comme le dit l'auteur et je n'ai pas l'impression que cet algo soit trop gourmand en CPU... Enfin à tester. Merci pour le lien!




