


Sur un robot, il y a des chances que les roues soient importantes 
Pour mon dernier robot, R.Ian, j'ai décidé de fabriquer les roues, à l'imprimante 3D.
J'ai donc fait un script OpenScad, et fait en sorte qu'on puisse modifier des paramètres de la roue, par exemple, la taille, l'épaisseur de la jante, le nombre de bras, l'axe central, etc.
J'ai maintenant décidé de rendre cette partie du code plus générique, et faire quelque chose d'adaptable, et de configurable à souhait. Du coup, voici le projet OpenWheel, pour lequel j'ai créé un GitHub.
C'est encore en développement, mais voici les fonctionnalités prévues:
- roues paramétriques (fait);
- pneus configurables (fait);
- engrenages paramétriques (fait);
- roues pour chenilles paramétriques (fait)
- chenilles paramétriques (en partie fait)
Voici les engrenages imprimés :

J'ai aussi fait une version avec un rebord, adapté pour l'utilisation avec des chenilles.
Voici un exemple de test de chenille imprimée en ninjaflex :
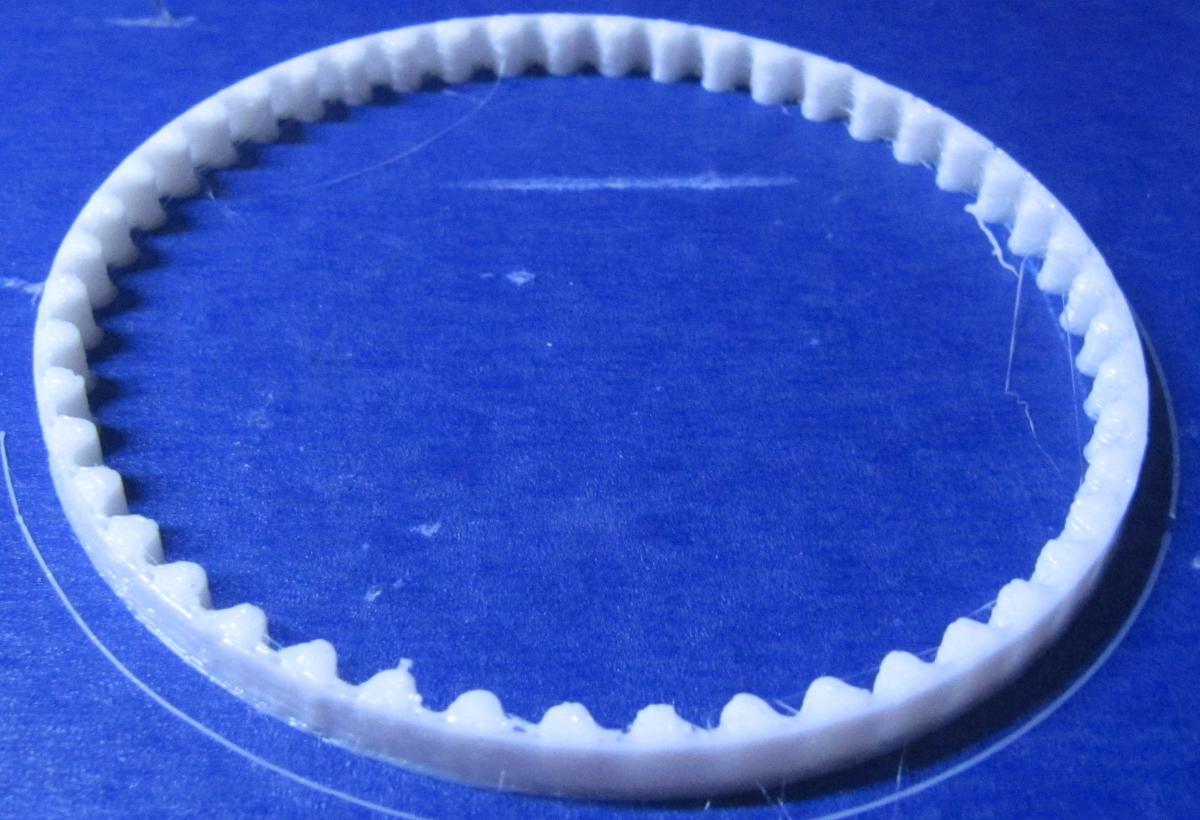
Du coup voici ce que ça donne :

C'est encore en développement, mais certaines choses sont déjà fonctionnelles. Pour ce qui est des pneus, il y a des pneus lisses, ou crantés, avec des rebords.
Pour les chenilles et les roues adaptées à celles ci , on choisir le nombre de "crans" sur la roue, et celui sur la chenille, et le script génère les deux pièces adaptées. J'ai pu tester, le tout s’emboîte bien, et la transmission de la rotation et de la puissance se passe bien.
La roue avec les rebords permet de garder la chenille en place. Je dois faire un petit ajustement, et élargir celle ci, car la chenille fait la même largeur que la roue, et du coup je vais rajouter une petite marge automatique qui réduira la friction.
Les chenilles ont la face externe plane, je dois également rajouter un système de crans pour améliorer l’adhérence/traction.















![[Mecapi] Projets scientifiques et plans de communication - dernier message par macerobotics](https://www.robot-maker.com/forum/uploads/profile/photo-thumb-9400.png?_r=1700632519)


![[En projet] Androide soldat Jonathan, fusilier et parachutiste de l'air en 3D de 60 cm du haut avec des servomoteurs XL-320 - dernier message par Robot Urbie en légo](https://www.robot-maker.com/forum/uploads/profile/photo-thumb-8501.jpg?_r=1636615750)




