Et merde :'(, ok merci Oracid j'espère que celles que j'ai commandé seront légère aussi :'(
@ Julkien : j'ai regardé rapidement ton lien, tout se fait sur windows apparemment et je suis sur Raspbian, mais merci, je crois que je vais tout de même essayer de me caler sur OpenCV dans un premier temps, du moins essayer déjà
PS: j'ai peut être moyen d'alléger le bignou (Glenn), vais voir si c'est jouable.
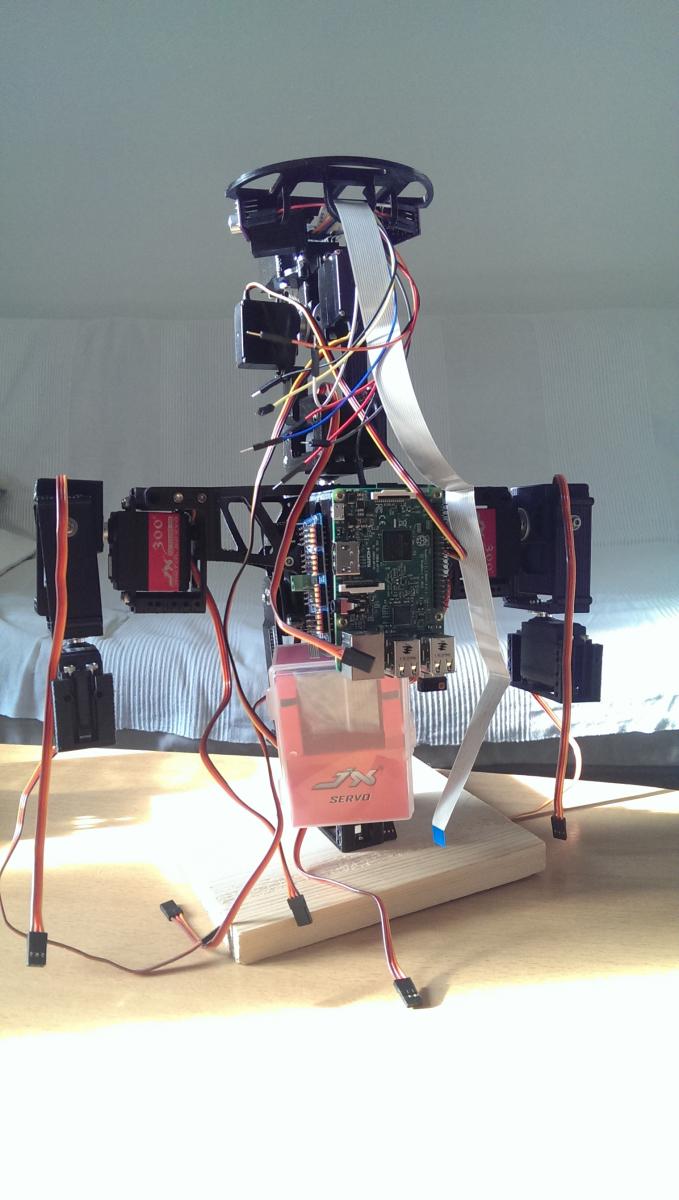
Bon bon booonnnnn coucou les Maker's, j'ai reçu les vis que je n'aurais jamais du avoir (celles qui se sont perdu), j'en ai profité pour monter Glenn avec un maximum de vis (vais avoir des ampoules lol), donc déjà je sais que j'ai pas mal de chose à revoir, inverser des servos sur la colonne, car trop de poids sur l'arrière.
Sinon le bestio fait 1.5 kg (j'arrondi), j'ai pesé avec la planche qui maintient le tout, plus la PI à l'arrière avec un PCA9685.
Par curiosité je vais tout de même brancher quelques servo et voir ce que ça donne, si vous voyez un nouveau post ou je pleure vous étonnez pas, c'est que j'aurai tout péter lol
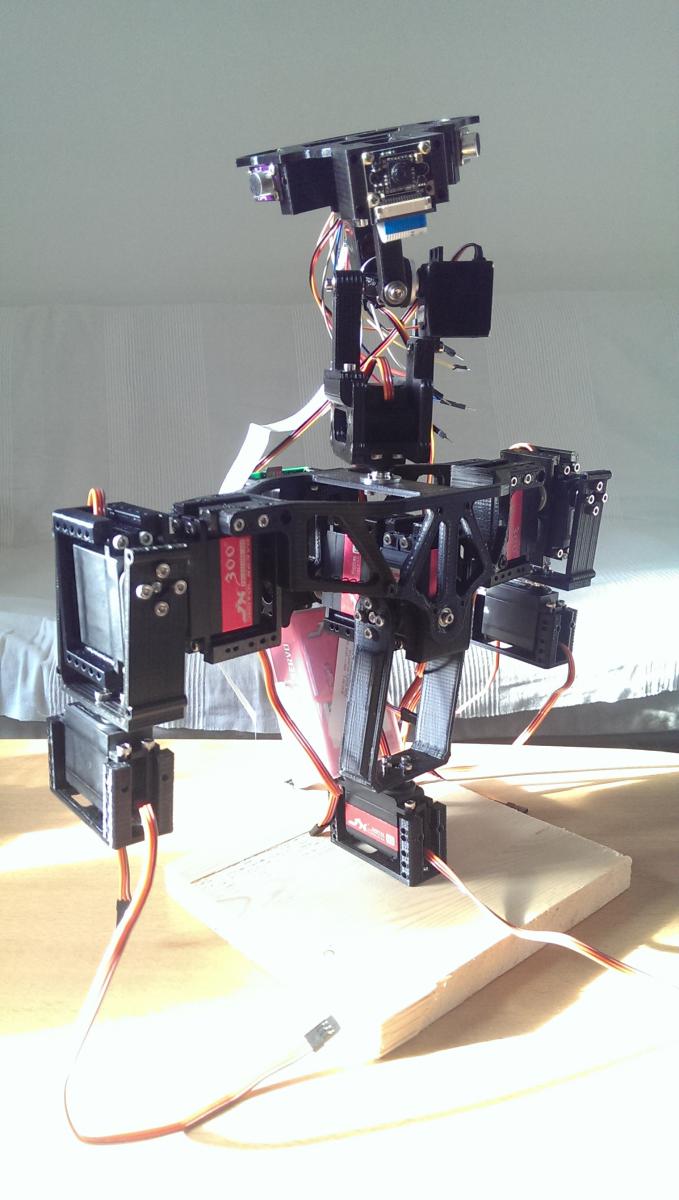
Bon là, il n'a pas d'avant bras, et pas de bras pas de chocolat ^^ (ok je sors)
Bon le mieux ce sont les photos je pense ^^
Merci ^^
Ps : @ Oracid ; j'ai fais ce que j'ai pu pour le fond blanc
Edit : que pensez vous du poids, cela vous parait lourd pour l'instant, car le poids risque tout de même d'être augmenter, je vais essayer de ne pas dépasser les 2 kg pour le haut, peut être un peu d'espoir pour pouvoir le faire marcher.
WWAAAHHOOUUUU, je pensais que le servo qui tenait tout le poids, du moins celui qui pour moi forcerait le plus, et bien tiens bien le coup, je viens de faire quelques petits tests rapide (avant en arrière pleine bille Axe X), ça tiens le coup et rien n'a péter, et il ne fais pas de bruit lorsqu'il tiens ça position, du coup va falloir que je test en rajoutant du poids pour voir ^^
En revanche, j'attend de voir à quel moment le grand U qui maintient le torse au servo fixer sur la planche va péter ^^
Je vais attendre oui, j'ai déjà bien assez à faire avec les jambes d'HumaOne.....Nous pourrons faire un échange d’expérience sur chacun des sujets !!!!
Ouaaaaaaah !!!! La tronche !!! On dirait un Alien ! Magnifique !
Pour les photos, ton fond gris vert est super, mais c'est quoi ce tissu blanc au centre qui réfléchit la lumière ?
C'est une excellente idée de faire, chacun, la moitié du robot. Un, fait le torse et l'autre, les jambes. Ce sont deux domaines radicalement différents, et plutôt que de se noyer dans les difficultés, il vaut mieux répartir le boulot. Même, un gars comme James Bruton qui a de gros moyens n'y arrive pas . Il fait le torse, ou les jambes, mais pour l'instant, il n'a pas réussi à réunir les deux.
@ Telson : pas de soucis, mais effectivement attends, car j'ai déjà en tête quelques idées pour le modifier et réduire un peu le torse, si je gagne en poids, j'arriverai peut être à le faire marcher ^^
@ Oracid :
Pour les photos, ton fond gris vert est super, mais c'est quoi ce tissu blanc au centre qui réfléchit la lumière ?
Taquin va lol, c'est pas de ma faute si je fais des photos toutes pourris lol
Ben perso, commencer par le torse me donnait plus de possibilité pour délirer dessus (avec la cam, micros, central inertiel etc etc), et une fois que je pourrais (faut absolument que je test de toutes façons), je passerai aux jambes .
Sinon question : que pensez vous de la BeagleBone Black ??
Quand je vois toutes ces sorties, je me dis qu'en passant par les Gpio y a peut être moyen de récupérer plusieurs PWM, non ???
En fait pourquoi je pense à cette carte, c'est en voyant une video d'Ashira :
Récupérer d'autres infos du servomoteurs je trouve ça intéressant sans pour autant acheter des Dynamixel. Et j'ai pas mal de servomoteurs...
Et donc, comme me l'avait Ashira il y a quelques temps, souder un fils en plus au servo pour récupérer d'autres infos (ça va là, je dis pas trop de conneries ? ) et le passer par une entrée PWM (hum hum, je m'enfonce, non ?), et donc si je pige bien, il y a plein de Gpio sur la BeagleBone et surement moyen d'en transformer en PWM, ou alors si je suis la doc je suis réellement limité en PWM ? (8 apparemment )
McASP0, SPI1, I2C, GPIO(65), LCD, GPMC, MMC1, MMC2, 7 AIN(1.8V MAX), 4 Timers, 3 Serial Ports, CAN0, EHRPWM(0,2),XDMA Interrupt, Power button, Expansion Board ID (Up to 4 can be stacked)
@ Oracid : Taquin va lol, c'est pas de ma faute si je fais des photos toutes pourris lol
Mais non ! J'étais vraiment sincère ! Le seul truc, à mon avis, c'est qu'il faut éviter la confusion en mettant d'autres éléments entre ton sujet et ton fond comme ce tissu blanc. Mais, vraiment, ton fond est très bien ! En fait, moi, je triche à mort avec paint.net. Une fois que l'on sait utiliser un peu les Niveaux, la Netteté, et le gros Pinceau à 200 pixels avec la dureté à 0% pour effacer le contour, on fait illusion ...
Pour le reste, j'en pense rien, je suis largué. Alors, j'attends sagement la suite.
Sur le BeagleBone, tu vas tourner un vrai linux, ( comme le raspberry Pi), donc ce n'est pas une programmation temps reel. En particulier ton programme ratera des evenements venant des GPIO si ils sont a une trop grande frequence, surtout des que ton programme fait du vrai traitement avec.
Par exemple il n'est pas realiste de faire un encodeur en quadrature avec les GPIO d'un beaglebone ( ou d'un raspberry PI d'ailleurs), j'ai teste, j'ai fail.
Sur le beaglebone il y a par contre deux autres processeurs temps reels, qui eux peuvent etre utilise pour ce genre de traitement d'input a haute frequence ( 100Mhz max je crois), mais la programmation c'est plus proche de l'assembleur que du Python.
J'ai un beaglebone et j'ai fait des choses avec, mais pour l'instant je suis revenu a la combinaison raspberry PI + arduino, c'est plus simple a programmer.
@ Bobox : mince, me suis dis c'est une bonne carte vu les capacités et le nombre e Gpio de dispo
Perso j'ai pas envie de me mettre à coder sur Arduino, je n'ai rien contre de spécial sauf que déjà apprendre un langage ça demande du temps et surtout le maîtriser, alors en apprendre un second non merci, ça c'est un coup à m'embrouiller et laisser tomber.
J'ai choisi Python et je trouve ça bien sympa, après si il existe une autre solution sans passer par un autre langage je suis preneur.
Mais l'idée d'Ashira me plait bien, après, comment faire ?
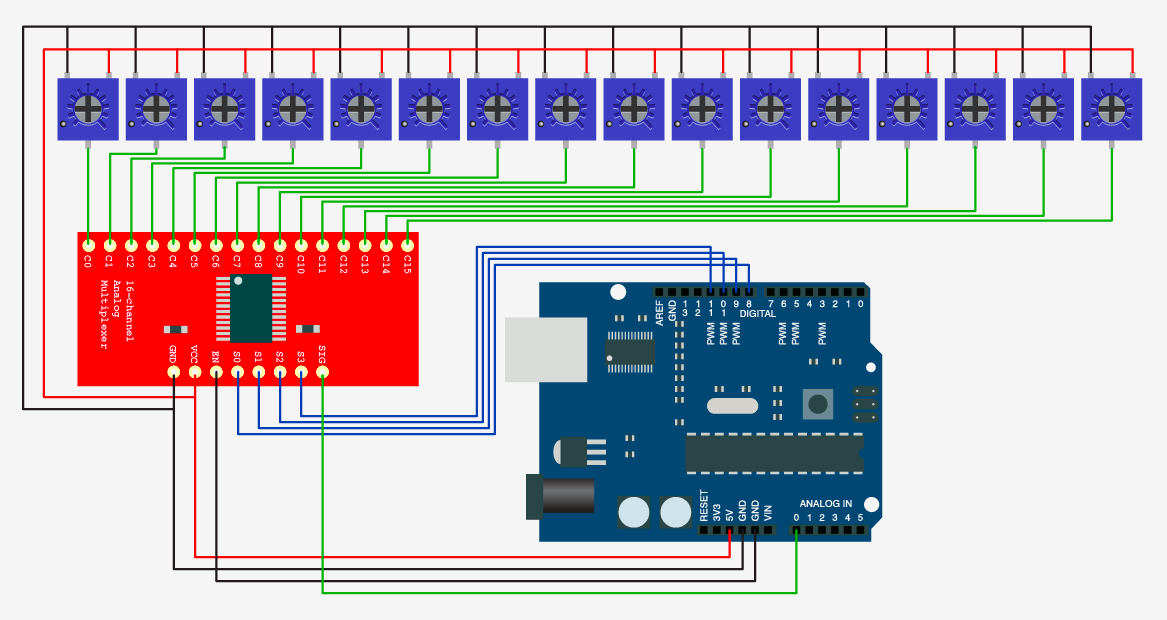
@ Ashira : je viens de voir ton post, donc on va dire j'ai 31 servomoteurs, il me faut donc 31 sortie analogique, je fais comment ce genre de chose m'sieur ?
Justement connaitre la position exact au cas ou si le moteur va trop loin dans sont mouvement, là ça pourra le "stopper" puisque l'on pourra récupérer la position, non ?
Et sur ta vidéo (ça m'a donné cette idée), je trouve le retour intéressant, genre pour des jambes et la colonnes (mais en écrivant ça je me dis que la central inertielle fera le boulot aussi pour rééquilibrer).
Oui par exemple les moteurs de l'épaule, si ça force peut être que le servomoteur n'arrivera pas à tenir exactement l'angle. Sur d'autre servomoteur (genre au niveau du cou) c'est pas forcément necessaire.
Ouf j'avais peur d'avoir mal compris le principe, donc on est bien d'accord, genre aussi pour atteindre parfaitement sa position, et oui la cou il n'y en a pas besoin ^^
J'y reviendrai, je laisse murir cette idée dans ma ptite tête pour voir à bien l'exploiter par la suite .
AAAhhhhhhhh enfin, j'arrive à faire communiquer deux fichiers entres eux avec les Class et Function ^^
Quelle galère, je suis passé par plusieurs tutos qui m'ont fait tourné en bourrique en mélangeant fonction et methode ^^
Je ne sais plus si je l'avais posté, je cherchais à créer un fichier ou toutes les infos des servos moteurs, plus le map en degrés pour la position devaient être regroupé, et c'est clair que dans le script principal par la suite c'est beaucoup plus léger à taper
Vais me retrouver dans la POO (programmation orienté objet) lol
Voilou le suivi, maintenant un peu de modélisation









 )
)