 sûr que tu vas trouver.
sûr que tu vas trouver.

Glenn Robot Humanoide
Débuté par Oliver17, juil. 05 2016 06:11
994 réponses à ce sujet
#261

Path
-

- Modérateur
-

- 2â¯504 messages
Made By Humans
- Gender:Male
- Location:Paris
Posté 07 novembre 2016 - 01:08
Si tu trouve pas ton bonheur, Google fritzing raspberry sûr que tu vas trouver.
sûr que tu vas trouver.
#262
Bobox
-

- Membres
-
- 157 messages
Membre occasionnel
- Gender:Male
- Location:Montigny le Bretonneux
Posté 07 novembre 2016 - 06:42
A mon avis la carte NVidia c'est overkill.
Pour en profiter au maximum, c'est a dire utiliser toute la partie 'carte graphique', et pas seulement le CPU, qui en lui-meme n'a rien d'exceptionnel, il va falloir programmer en CUDA, c'est de la programmation parallele, c'est deja accessible sur ton PC si tu as une carte NVIDIA ( y a des cours sur coursera si ca t'interesse), mais c'est pas de la programmation standard.
Moi je resterai sur ta config de base, et quand tu arriveras effectivement a une limite de performance, tu seras assez avance pour avoir une meilleur idee de ton besoin.

#264
Oliver17
-
- Modérateur
-
- 2â¯758 messages
Pilier du forum
- Gender:Male
- Interests:Glenn
Posté 10 novembre 2016 - 04:02
Plop les Maker's, un ptit retour, je traine un peu, il y a des jours comme ça, m'enfin...
J'ai revu le cou, mais sans les engrenages conique (snif) j'ai testé Freecad mais leurs engrenages ne sont pas terrible et les formules qu'ils utilisent j'ai un doute de leurs résultat, je dis ça car pendant plusieurs jours j'ai bouffé de la formules pour créer des engrenages (super intéressant), mais je ne m'en sors pas trop donc je met ça de coter, ce sera une des améliorations à apporter plus tard 
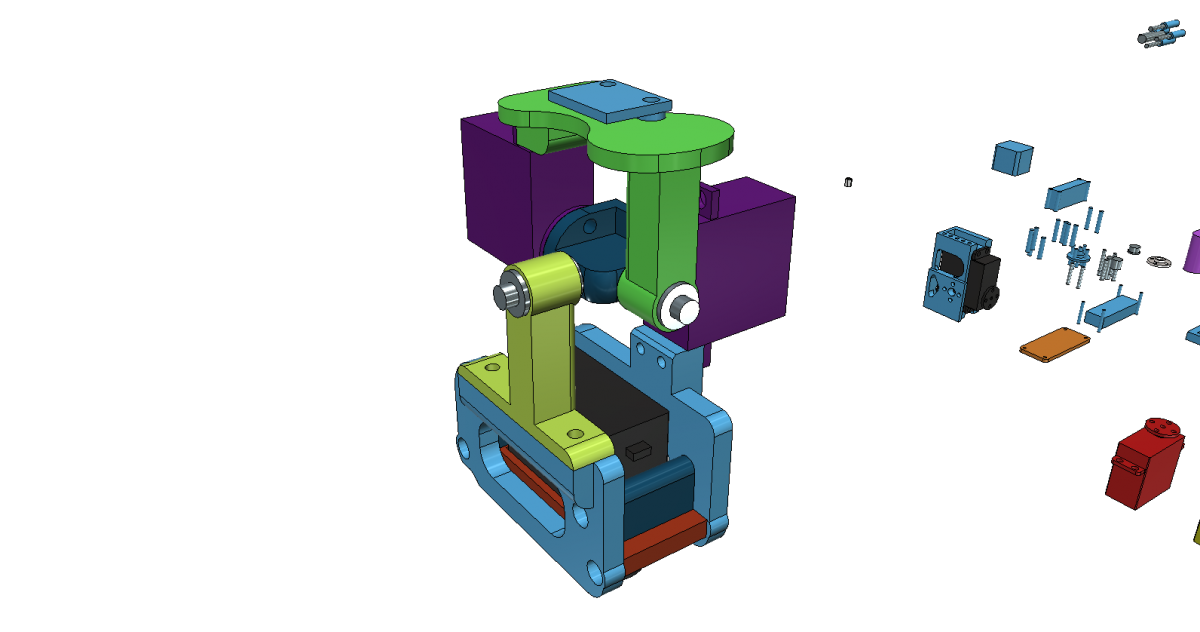
Alors j'ai fais un truc hyper simple, maintenant tout en haut de la pièce ce trouve représenté une central inertiel, je voulais la mettre au plus prés des axes (pour avoir un meilleur retour de données), donc du coup en haut je ne sais pas si c'est bon ???
Qu'en pensez vous ?
Merci
- Mike118 aime ceci
#265
Oracid
-

- Modérateur
-
- 7â¯030 messages
Pilier du forum
- Gender:Male
Posté 10 novembre 2016 - 07:26
Ben, euh, moi j'ai pas d'avis. Je demande à voir en vrai.
Ma chaine YouTube : https://www.youtube..../oracid1/videos
#266
Telson
-

- Membres
-
- 975 messages
Membre passionné
- Gender:Male
- Location:Punaauai - Tahiti
Posté 10 novembre 2016 - 08:09
C'est une très bonne question à laquelle je n'ai pas de réponse. Désolé.
Par contre en modélisation tu te débrouilles très bien.....Je crois que je vais un jour te mettre à contribution.
Je suis moi aussi en ce moment en pleine révision de la structure d'HumaOne mais mes pièces sont ultra massive....Il faudra par conséquent, lorsque la structure sera validée, des pièces plus légères, plus aérées et là et bien cela me prend beaucoup trop de temps......Mais peut être que pour certain cela ne serait pas un problème......
Dis moi tu imprimes en PLA ou ABS et avec quel taux de remplissage?
++
#267
Oliver17
-
- Modérateur
-
- 2â¯758 messages
Pilier du forum
- Gender:Male
- Interests:Glenn
Posté 11 novembre 2016 - 09:26
C'est quoi le délire, mon message n'a pas été posté hier soir, bref...
@ Oracid ; oui j'essaye d'imprimer aujourd'hui.
@ Telson : J'imprime en PLA remplissage à 20 %, sinon à voir tes pièces si c'est pas trop long à modéliser pourquoi pas, du moins si tu sais ce que tu veux avec les cotes exact de tes servomoteurs
#268
Mike118
-

- Administrateur
-
- 10â¯339 messages
Staff Robot Maker
- Gender:Male
- Location:Anglet
- Interests:Robotique, Entrepreneuriat, Innovation, Programmation, Résolution de problème, Recherche de solutions, Mécanique, Electronique, Créer, Concevoir
Posté 11 novembre 2016 - 11:51
Alors j'ai fais un truc hyper simple, maintenant tout en haut de la pièce ce trouve représenté une central inertiel, je voulais la mettre au plus prés des axes (pour avoir un meilleur retour de données), donc du coup en haut je ne sais pas si c'est bon ???
Qu'en pensez vous ?
Merci
Moi j'aime bien la façon dont tu as fait ça : simple et efficace.
Sinon oui le placement de la centrale inertiel me paraît judicieux si le but c'est de stabiliser la tête où d'autre aurais tu voulu le placer sinon ?
Si mon commentaire vous a plus laissez nous un avis ! 
Nouveau sur Robot Maker ?
Jetez un oeil aux blogs, aux tutoriels, aux ouvrages, au robotscope aux articles, à la boutique et aux différents services disponible !
En attendant qu'une bibliothèque de fichiers 3D soit mise en place n'hésitez pas à demander si vous avez besoin du fichier 3D d'un des produits de la boutique... On l'a peut être !
Si vous souhaitez un robot pilotable par internet n'hésitez pas à visiter www.vigibot.com et à lire le sous forum dédié à vigibot!
#269
Telson
-
- Membres
-
- 975 messages
Membre passionné
- Gender:Male
- Location:Punaauai - Tahiti
Posté 11 novembre 2016 - 11:54
Je termine la nouvelle structure de HumaOne et nous reparlerons alors de l'optimisation de mes pièces.
En fait et t'il possible, sur la base d'une pièce disons relativement massive, cubique, d'effectuer une optimisation structurelle avec un logiciel pour aérer celle-ci..........C'est pas très clair non?
Mes impressions à 20% avec du PLA ne m'ont par permis d'obtenir des pièces solides MAIS je ne suis pas très compétent pour définir avec certitude que ce soit le taux de 20% qui n'allait pas.....
#270
Oliver17
-
- Modérateur
-
- 2â¯758 messages
Pilier du forum
- Gender:Male
- Interests:Glenn
Posté 11 novembre 2016 - 12:10
@ Mike : (déjà la central n'était pas dans le bon sens, j'ai rectifié) sinon au plus proche des axes X et Y, mais c'est pas faisable.
Stabiliser la tête, oui entre autres, mais aussi pour voir les délires que je pourrais me faire ^^, récupérer les infos au niveau de la tête peuvent être intéressant je trouve, à savoir que j'ai une autre central qui elle sera placé au niveau du basse (un jour peut être). ^^
@ Telson : Le seul moyen pour aérer une pièce que je connaisse et bien c'est de la travailler dans ton soft de modélisation, je ne connais pas de solution miracle hélas 
Si tu fais référence à mes pièces, je pars toujours d'une pièce primitive (cube, cylindre etc etc), je casse les angles, je soustrais, j'additionne etc etc...
Tu sais après va savoir, toutes mes pièces vont peut être ce péter la tronche, mais pour l'instant je n'ai pas réussi à en péter ne serai ce qu'à la main, mais avec les servo ça va être une autre histoire je pense ^^
Merci
#271
Telson
-
- Membres
-
- 975 messages
Membre passionné
- Gender:Male
- Location:Punaauai - Tahiti
Posté 11 novembre 2016 - 01:38
ha oui non en fait les pièces ne cassent pas mais elles plient, se courbent et les mouvements sont moins bon mais mon cas n'est certainement pas un bon exemple......
#272
Oliver17
-
- Modérateur
-
- 2â¯758 messages
Pilier du forum
- Gender:Male
- Interests:Glenn
Posté 11 novembre 2016 - 03:01
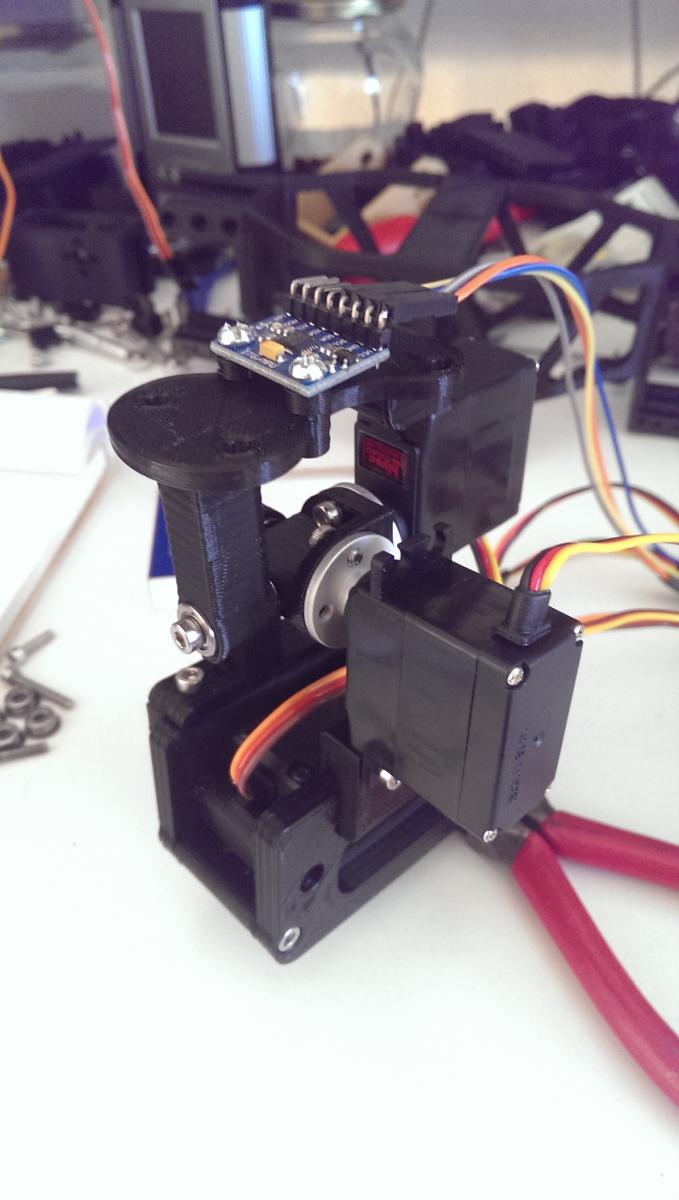
Ah ouais effectivement, je te dirai si j'ai les mêmes soucis.
Sinon voilà ce que ça donne ^^
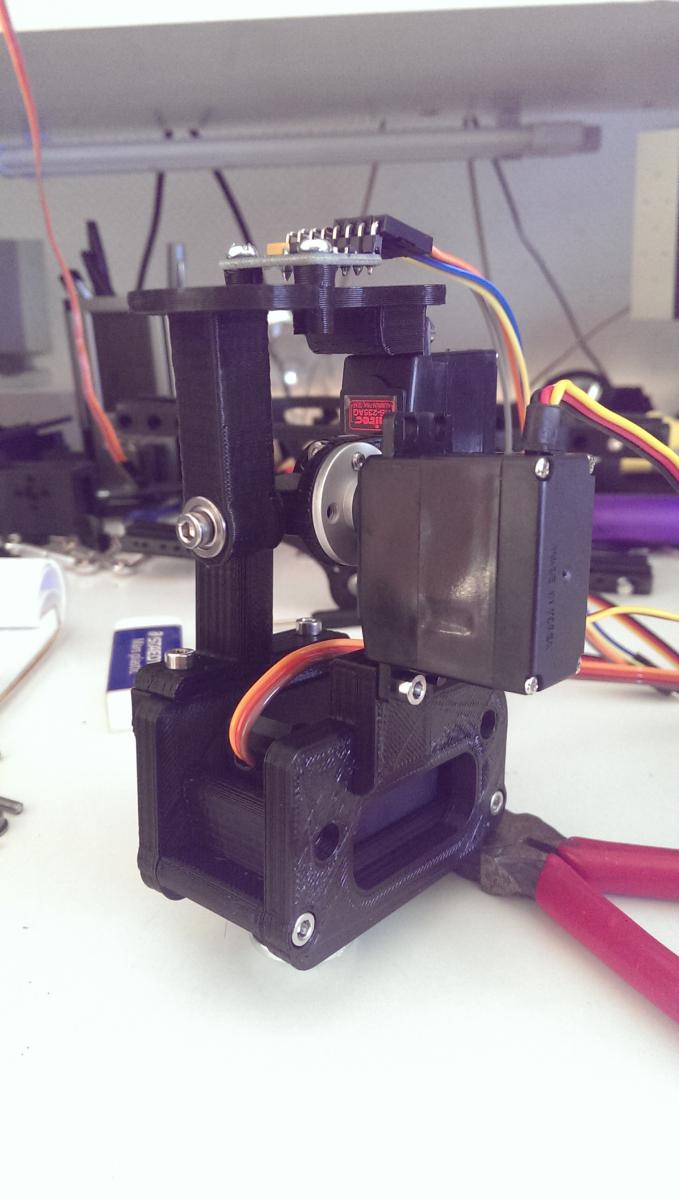
PS : par contre ça va être vite chiant si les servo tremblent toujours une fois sur leurs positions (du moins pas tous et quand ça veut).
Merci ^^
Modifié par Oliver17, 11 novembre 2016 - 03:08 .
#273
Oracid
-
- Modérateur
-
- 7â¯030 messages
Pilier du forum
- Gender:Male
Posté 11 novembre 2016 - 05:50
Il y un truc qui m'échappe. Il y a 50 ans, les servos tremblaient déjà et je crois me souvenir que c'était régler cette histoire.
De mémoire, dans les revues on proposait tout un tas de circuits électroniques pour éviter ce tremblement.
C'est pas réglé, alors ?
De mémoire, dans les revues on proposait tout un tas de circuits électroniques pour éviter ce tremblement.
C'est pas réglé, alors ?
Ma chaine YouTube : https://www.youtube..../oracid1/videos
#274
Oliver17
-
- Modérateur
-
- 2â¯758 messages
Pilier du forum
- Gender:Male
- Interests:Glenn
Posté 11 novembre 2016 - 06:37
Ben je pourrai pas te répondre sur cette histoire, je constate juste qu'à l'"instant t" ^^ parfois ça tremblote, parfois non, mais là ça ne le fait plus, puis comme la souligné Telson, ma carte qui pilote mes servos est un clone, ce qui pourrait être la cause des problèmes, j'attend de voir pour pouvoir m'en acheter une officiel.
J'ai fais un test avec la central rapide comme ça, ça va, elle est pas trop mal placé apparemment, les valeurs m'ont l'air correct.
Par contre, je ne sais pas quoi placer pour les caméras, genre une pour la reconnaissance (sans la vision stéréoscopique), et l'autre pour le TOF (je crois que j'en avais déjà parlé de cette idée), cela me parait intéressant, le hic, c'est niveau matériel, quoi prendre ???
Un avis, ou du matèriels à me conseiller ??
Merci
#275
Ulysse
-

- Membres
-
- 486 messages
Habitué
- Gender:Not Telling
Posté 11 novembre 2016 - 09:12
Par contre, je ne sais pas quoi placer pour les caméras, genre une pour la reconnaissance (sans la vision stéréoscopique), et l'autre pour le TOF (je crois que j'en avais déjà parlé de cette idée), cela me parait intéressant, le hic, c'est niveau matériel, quoi prendre ???
A ce niveau tout dépend du but recherché et du budget.
- Si c'est juste pour tourner la tête en direction de la baballe rouge ou suive un visage, une simple webcam suffit, c'est (pratiquement) gratuit.
- Si c'est pour éviter les obstacles à l'intérieur, un petit capteur TOF monté sur tourelle ou mieux une caméra TOF fera le job mais le budget n'est plus le même
- Si c'est pour se repérer et cartographier l'environnement en 3D, on s'oriente vers un LIDAR simple (une seule ligne) et un plus gros budget. Ou un LIDAR à 64 faisceaux pour le prix d'une voiture.
Les sous...hélas toujours les sous ... :kez_13:
#276
R1D1
-

- Modérateur
-
- 1â¯212 messages
Modérateur et Membre passionné
- Gender:Male
- Location:Autriche
Posté 11 novembre 2016 - 11:49
La kinect (et ses clones) fournit une image couleur et nuage de point 3D pour pas si cher que ça (comparé aux autres produits type LIDAR). C'est certes plus cher qu'une webcam, et il y a une zone morte de détection de la profondeur sur les objets à moins de 40cm, mais il y a de quoi faire (dont du SLAM).A ce niveau tout dépend du but recherché et du budget.
Les sous...hélas toujours les sous ... :kez_13:
- Si c'est juste pour tourner la tête en direction de la baballe rouge ou suive un visage, une simple webcam suffit, c'est (pratiquement) gratuit.
- Si c'est pour éviter les obstacles à l'intérieur, un petit capteur TOF monté sur tourelle ou mieux une caméra TOF fera le job mais le budget n'est plus le même
- Si c'est pour se repérer et cartographier l'environnement en 3D, on s'oriente vers un LIDAR simple (une seule ligne) et un plus gros budget. Ou un LIDAR à 64 faisceaux pour le prix d'une voiture.
#277
Ulysse
-
- Membres
-
- 486 messages
Habitué
- Gender:Not Telling
Posté 12 novembre 2016 - 11:27
Oui, très bon ça la Kinect.  Quelqu'un sur le forum aurait une réalisation pratique à présenter ? un tuto ?
Quelqu'un sur le forum aurait une réalisation pratique à présenter ? un tuto ?
#278
Oliver17
-
- Modérateur
-
- 2â¯758 messages
Pilier du forum
- Gender:Male
- Interests:Glenn
Posté 12 novembre 2016 - 12:09
La kinect c'est trop lourd et j'ai jamais vraiment réussi à la faire fonctionner correctement.
Sinon l'idée d'avoir les deux, le TOF pour calculer, la profondeur et voir autres applications éventuel que l'on peut faire avec (je ne connais pas toutes les possibilités), et une cam pour reconnaître, visage, mains, couleurs etc etc etc (genre openCV) et voir plus, le but c'est de ce faire plaisir en apprenant, et avec du matériel qui tiens la route.
J'avais déjà expliqué tout cela dans un post ^^
Merci
#279
Telson
-
- Membres
-
- 975 messages
Membre passionné
- Gender:Male
- Location:Punaauai - Tahiti
Posté 12 novembre 2016 - 12:12
Et ça vous en pensez quoi : http://www.lextronic.fr/P1890-module-de-reconnaissance-video-cmucam4.html
#280
Oliver17
-
- Modérateur
-
- 2â¯758 messages
Pilier du forum
- Gender:Male
- Interests:Glenn
Posté 12 novembre 2016 - 01:09
Tu a lu tout en bas, "produit remplacé par la cmucam5".
Mais je ne sais plus sur quel post, avec les infos d'Ashira il m'avait conseillé celle ci
https://www.kickstar...ion/description
Le seul truc c'est quelle a un grand angle et pour la vision stéréoscopique c'est pas top, il faut un traitement de plus apparemment.
MAIS, comme la vision stéréoscopique n'est plus d'actualité, car envie de coupler une cam avec une cam en TOF, je me dis que je vais me laisser tenter, en plus il reste quatre jours pour la commander.

Je ne sais pas si c'est valable de prendre le shield pour piloter les servos.






0 utilisateur(s) li(sen)t ce sujet
0 members, 0 guests, 0 anonymous users

