Justement c'était ma question path ^^ Mais oliver a répondu que non ^^

Glenn Robot Humanoide
Débuté par Oliver17, juil. 05 2016 06:11
994 réponses à ce sujet
#841

Mike118
-

- Administrateur
-

- 10â¯314 messages
Staff Robot Maker
- Gender:Male
- Location:Anglet
- Interests:Robotique, Entrepreneuriat, Innovation, Programmation, Résolution de problème, Recherche de solutions, Mécanique, Electronique, Créer, Concevoir
Posté 05 septembre 2018 - 11:18
Si mon commentaire vous a plus laissez nous un avis ! 
Nouveau sur Robot Maker ?
Jetez un oeil aux blogs, aux tutoriels, aux ouvrages, au robotscope aux articles, à la boutique et aux différents services disponible !
En attendant qu'une bibliothèque de fichiers 3D soit mise en place n'hésitez pas à demander si vous avez besoin du fichier 3D d'un des produits de la boutique... On l'a peut être !
Si vous souhaitez un robot pilotable par internet n'hésitez pas à visiter www.vigibot.com et à lire le sous forum dédié à vigibot!
#842
Path
-

- Modérateur
-
- 2â¯504 messages
Made By Humans
- Gender:Male
- Location:Paris
Posté 05 septembre 2018 - 11:24
Ha pardon  Ha ben non alors
Ha ben non alors

#844
Oliver17
-
- Modérateur
-
- 2â¯758 messages
Pilier du forum
- Gender:Male
- Interests:Glenn
Posté 09 septembre 2018 - 09:51
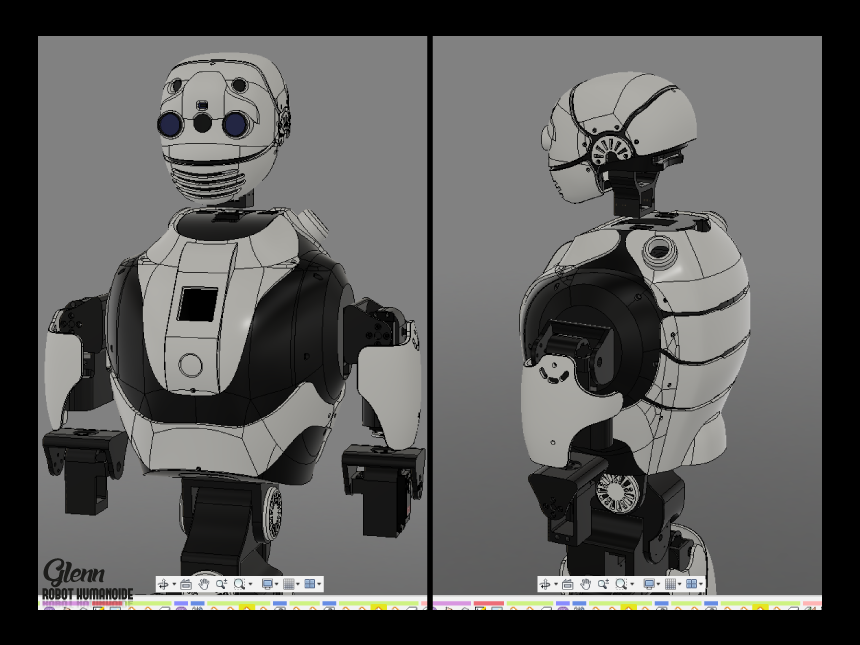
Coucou les Maker's, bon j'ai retouché la tête et le torse aussi bien sur les structures et les capots (même si c'est pas flagrant)
donc moins de vis, moins de matières à certains endroits, et j'ai donc moins de poids...
Il faut que je peaufine encore certaines choses.
Donc un p'tit screen rapide 
#845
Oliver17
-
- Modérateur
-
- 2â¯758 messages
Pilier du forum
- Gender:Male
- Interests:Glenn
Posté 17 octobre 2018 - 07:21
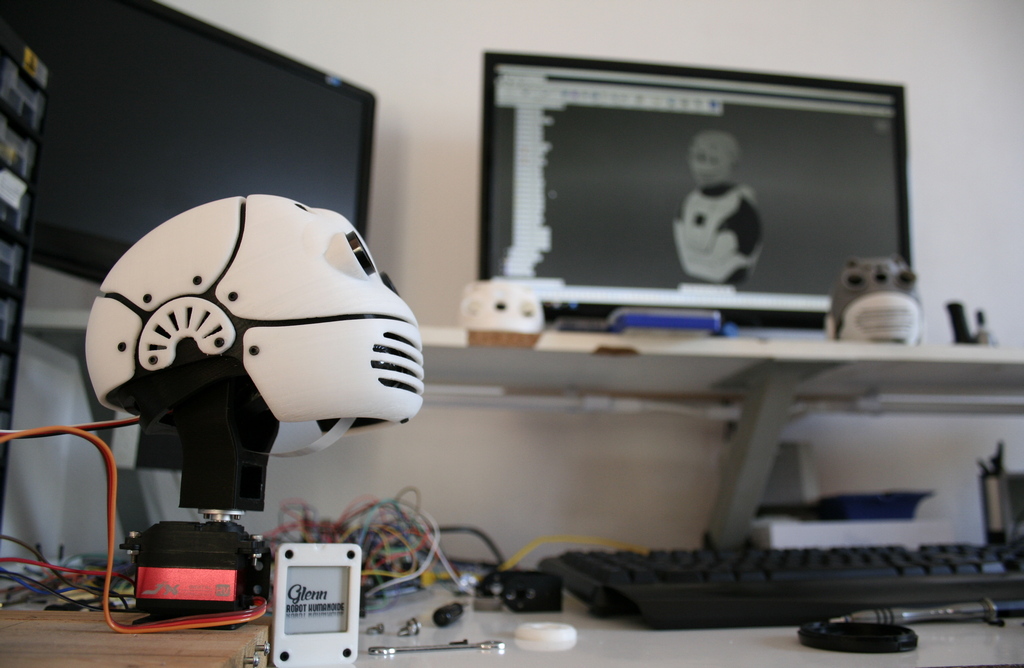
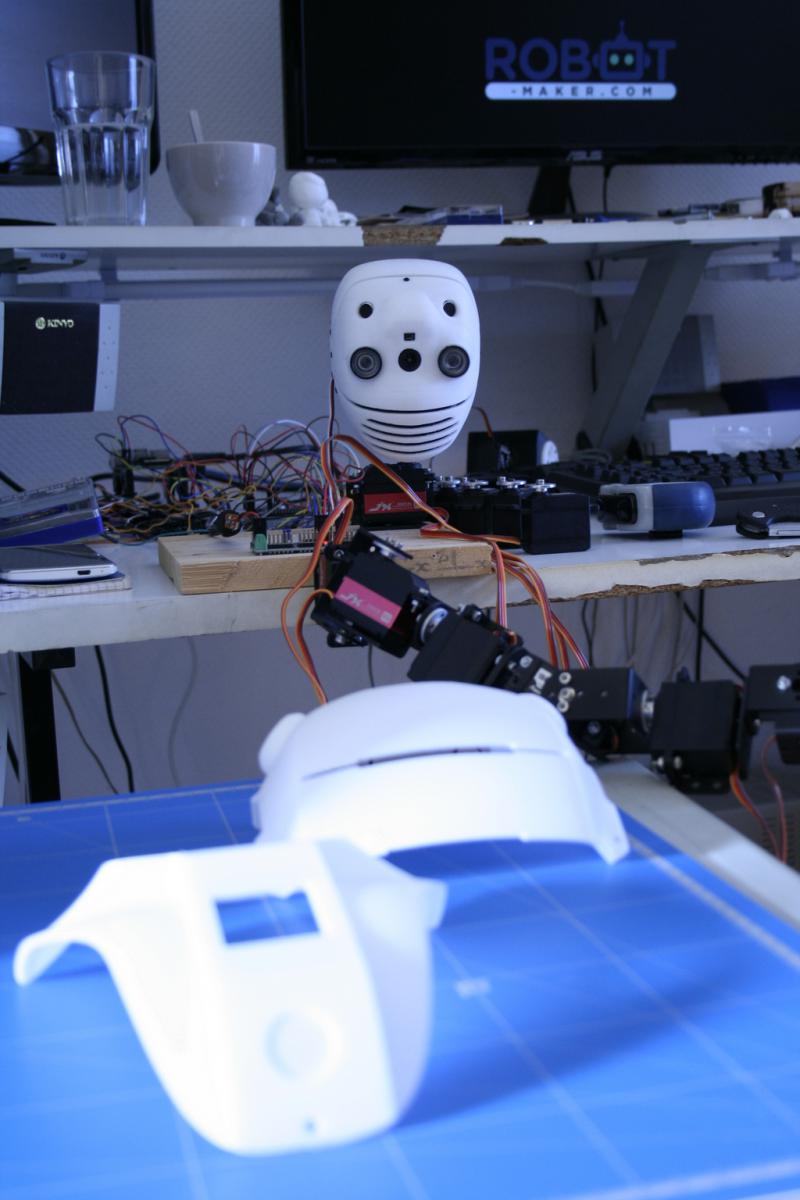
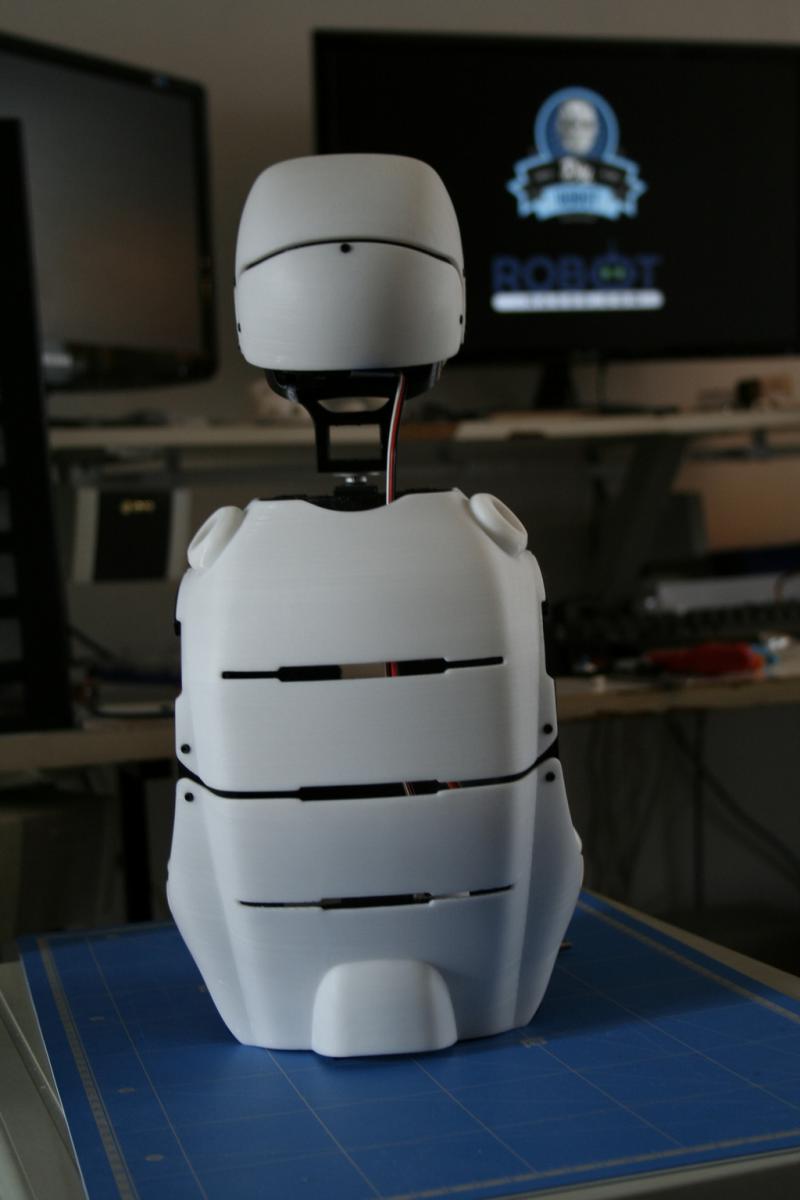
Bonjour les Maker's, voici les news (oui je sais cela faisait un moment), j'ai donc fais plusieurs tests d'impressions pour la tête et je vous présentes celle qui servira pour mes tests (fort possible que je retouche la tête entre temps ^^).
Il a fallu sur la totalité 38 h 15 mn d'impression...
La structure de la tête a été la plus longue avec 23 h 25 mn de print (la partie noir).
J'ai poncé les capots et j'aime beaucoup le rendu, bon par contre faut un peu plus de finition sur le ponçage ^^
Je compte prochainement imprimer le torse, mais là il va falloir plus de 3 jours de print, outch...


#846
Forthman
-

- Membres
-
- 1â¯489 messages
Membre chevronné
- Gender:Not Telling
- Location:Montauban (82)
Posté 18 octobre 2018 - 05:51
la vache ! 
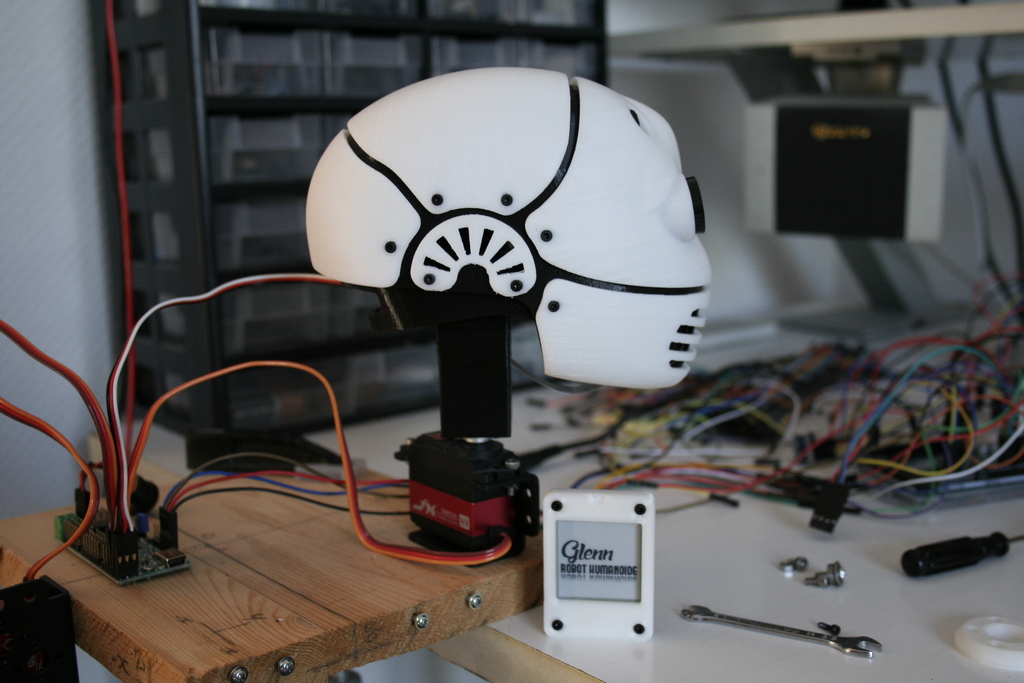
de profil ta tête (enfin, celle de Glenn) est superbe.
Par contre, de face e la trouve... bofff... mais je pense que c'est parce qu'on ne voit pas bien les reliefs sur la photo.
(enfin, je dis bof, comparé aux vues de profil, elle est superbe quand-même)
Une photo de 3/4 c'est possible ? 
#847
Oracid
-

- Modérateur
-
- 7â¯030 messages
Pilier du forum
- Gender:Male
Posté 18 octobre 2018 - 06:23
Bravo !
Je vois que les servos sont en place.
Alors, c'est pour quand, la petite vidéo ?
Je vois que les servos sont en place.
Alors, c'est pour quand, la petite vidéo ?
Ma chaine YouTube : https://www.youtube..../oracid1/videos
#848
Oliver17
-
- Modérateur
-
- 2â¯758 messages
Pilier du forum
- Gender:Male
- Interests:Glenn
Posté 18 octobre 2018 - 09:21
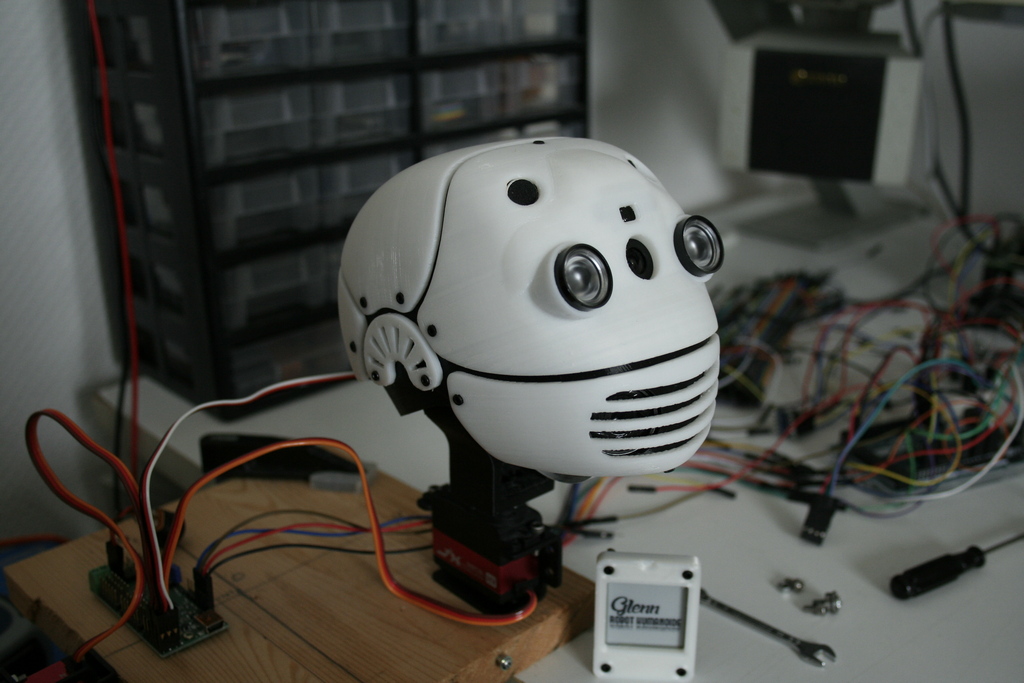
@Forthman : ouais c'est clair, moi aussi un truc me choque de face, je crois voir d'ou vient ce problème visuel, j'ai apparemment trop prononcé le front sur chaque coté, bah de toutes façons j'avais déjà de nouvelles idées pour la tête, genre inverser la caméra et le capteur de distance au niveau des emplacements et d'autres petits trucs ^^
PS : j'ai rajouté le 3/4.
@Oracid : bah une vidéo y aura pas grand chose, j'ai juste fais des tests voir si cela s'assemble bien
Comme dis je vais imprimer le torse, ou j'hésite à faire un bras pour tester, mais va falloir que j’achète quelques servomoteurs et que j'en trouve un mini qui ne fasse pas de bruit car au niveau de la tête, oh la la le bordel que ça fait, c'est insupportable.
#849
Forthman
-
- Membres
-
- 1â¯489 messages
Membre chevronné
- Gender:Not Telling
- Location:Montauban (82)
Posté 18 octobre 2018 - 10:01
Non mais cherche pas, c'était bien la photo qui fait ça, comme c'est blanc sur blanc la profondeur ne se distingue pas bien, en 3/4 c'est superbe 
#851
Oliver17
-
- Modérateur
-
- 2â¯758 messages
Pilier du forum
- Gender:Male
- Interests:Glenn
Posté 31 octobre 2018 - 02:01
Plop les Maker's, j'ai une question qui tue lol, mais je n'ai pas trouvé la réponse, donc est il grave de mettre l'indice d'un tableau à 0 lors de son initialisation ??
Sachant que ce tableau deviendrait un peu dynamique si je puis dire car en fait j'ai une structure de tableau, le hic c'est qu'au début je ne connais pas l'indice, ensuite j'ai une class qui me permet de créer ma cinématique et donc j'entre pour chaque articulation les infos nécessaire, ce qui fait qu'à chaque entrée dans ma class, cela créer un indice en plus pour le tableau.
Cela comporte t'il un risque pour le programme ?
Car de cette façon ça fonctionne, mais j'ai pas trouvé si un problème peut intervenir avec cette manip.
En gros : (je fais cours)
S_COORWORLD s_coorWorld[0]; //Indice initialisé à 0
et des que je créer un objet, je copie mes informations dans ce tableau, etc etc
Mais pas sur de la bonne marche à suivre...
J'avais aussi créer un compteur d'objets via le constructeur, mais ça ne fonctionne pas avec le tableau, du moins l'idée ne fonctionne ^^
Merci ^^
Edit : après d'autres tests, effectivement à 0 ça met le dawa ^^
Modifié par Oliver17, 31 octobre 2018 - 02:26 .
#852
arobasseb
-

- Administrateur
-
- 737 messages
Membre passionné
- Gender:Male
- Location:BORDEAUX (33)
- Interests:Informatique, robotique et sciences technique en générale.
Posté 31 octobre 2018 - 03:41
Pour faire un tableau dynamique en C++, de mémoire le plus simple serait d'utiliser la classe vector. Mais je ne sais pas si cela fonctionne sur de l'arduino. A faire confirmer quand même
#853
Oliver17
-
- Modérateur
-
- 2â¯758 messages
Pilier du forum
- Gender:Male
- Interests:Glenn
Posté 31 octobre 2018 - 05:07
Oui j'ai bien vu ça l'utilisation de "Math", mais comme j'utilise déjà Eigen comme lib pour les matrices et vecteurs je me suis dis que j'aurais pu faire la même chose qu'avec "Math" au niveau vecteur, mais j'ai pas trouvé l'info qui me le confirmé et surtout à utiliser avec une structure.
Sinon je ne vais pas m'emmerder je vais mettre une "Define nb_articulations" et voilà lol.
#854
Mike118
-
- Administrateur
-
- 10â¯314 messages
Staff Robot Maker
- Gender:Male
- Location:Anglet
- Interests:Robotique, Entrepreneuriat, Innovation, Programmation, Résolution de problème, Recherche de solutions, Mécanique, Electronique, Créer, Concevoir
Posté 31 octobre 2018 - 05:13
il y a une librairie pour qui s'appel standard c plus plus master pour arduino.
Mais oui je te recommande à 100% de mettre ton #define NBARTICULATIONS 2 // tu modifieras par la suite en fonction du nombre d'articulations
Si mon commentaire vous a plus laissez nous un avis !
Nouveau sur Robot Maker ?
Jetez un oeil aux blogs, aux tutoriels, aux ouvrages, au robotscope aux articles, à la boutique et aux différents services disponible !
En attendant qu'une bibliothèque de fichiers 3D soit mise en place n'hésitez pas à demander si vous avez besoin du fichier 3D d'un des produits de la boutique... On l'a peut être !
Si vous souhaitez un robot pilotable par internet n'hésitez pas à visiter www.vigibot.com et à lire le sous forum dédié à vigibot!
#856
Oliver17
-
- Modérateur
-
- 2â¯758 messages
Pilier du forum
- Gender:Male
- Interests:Glenn
Posté 20 février 2019 - 04:01
Plop les Maker's, lorsque je vois ce que l'on peut faire avec une imprimante, par moment j'ai l'impression d'être Tony Stark lol

En bref, ça avance doucement, le direct drive pour la CR10S et bientôt opérationnel il me manque un ventilo 5015 et zou début de test et par la suite print de la partie centrale du torse, depuis le temps que ça traîne.
Je crois que Glenn à hate d'être monté, perso, moi aussi ^^
Merci ^^
#857
Oliver17
-
- Modérateur
-
- 2â¯758 messages
Pilier du forum
- Gender:Male
- Interests:Glenn
Posté 30 mars 2019 - 02:30
Plop les Maker's, bon après quelques petits soucis qui ont duré, je fais aussi dans le teaser lol ^^
PS : non ce n'est pas de la fumé sur les photos, c'est juste mon reflet sur le plexi 
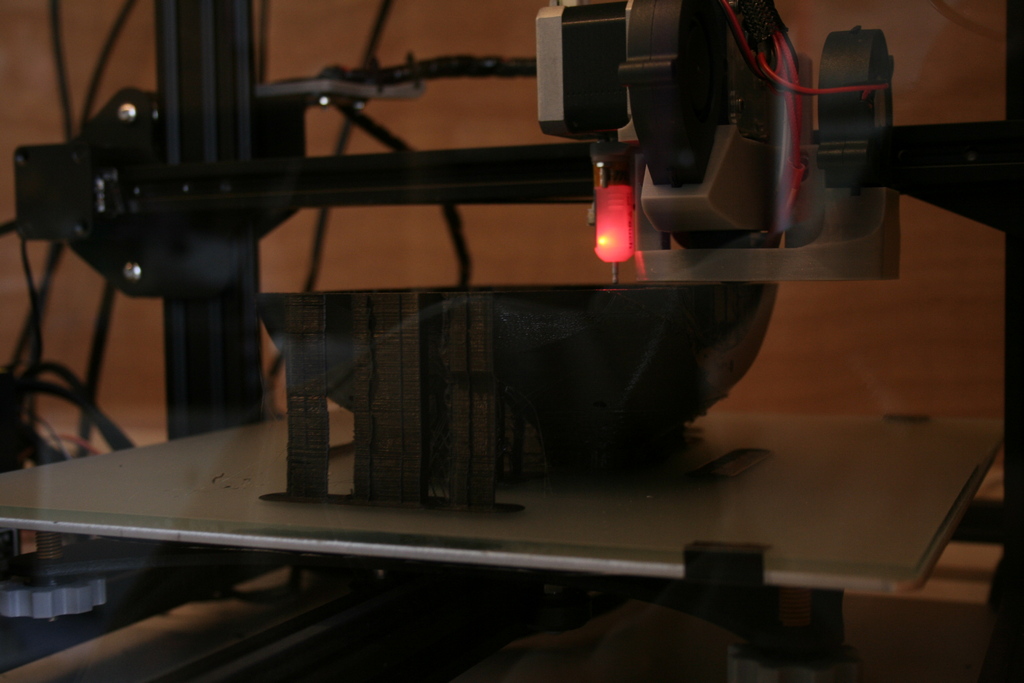
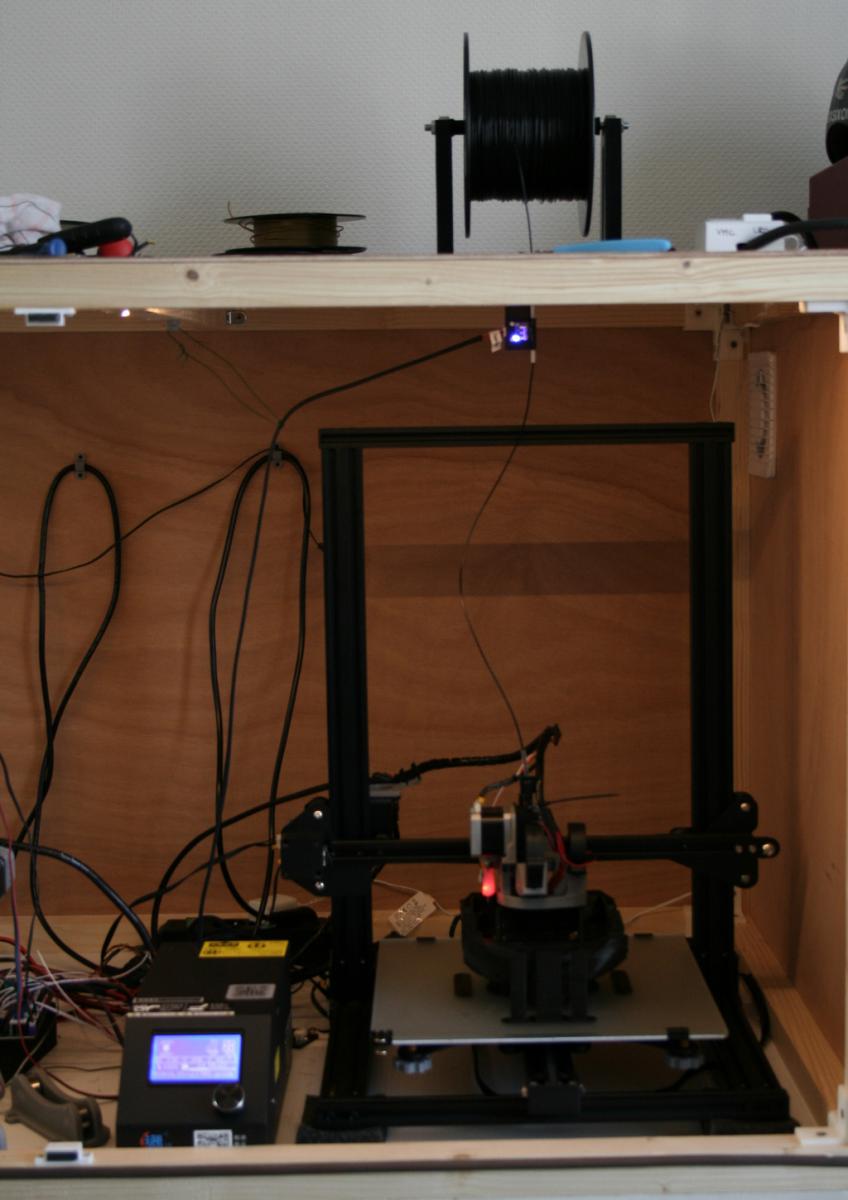
Je print sur la CR10S, je me suis fais un ptit montage en Direct Drive DIY
Le capteur de fils et au plafond du caisson et le support bobine sur le caisson pouvant accueillir des bobines jusqu'à 2kg.
Par contre faut pas que je me loupe, car je ne pourrai pas acheter de PLA se mois ci...
PS2 : impression en court avec le fil robot-maker.
N'hésitez pas via mon compte tipeee à participer si le cœur vous en dit
Merci ^^
#858
Oliver17
-
- Modérateur
-
- 2â¯758 messages
Pilier du forum
- Gender:Male
- Interests:Glenn
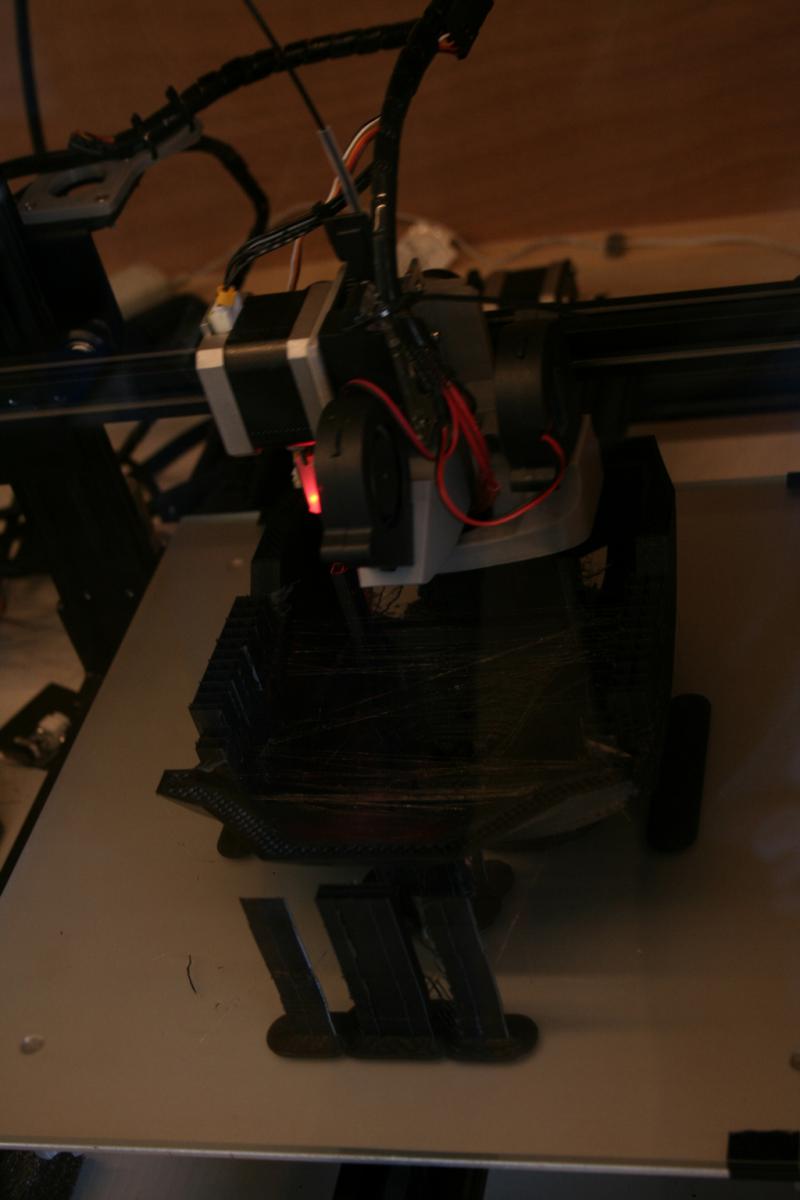
Posté 02 avril 2019 - 05:41
Bonjour les Maker's, bon, après plus de 3 jours et 8 heures de print pour la partie central du torse, cela ne me plait pas beaucoup, alors la pièce en elle même est sympa, même si il y a des ratés qui ne gène pas trop sont utilité, mais elle pèse 605 gr et je suis sur et certains que je peux créer un autre design sympa et plus léger, ne serait ce que 100 gr de moins ce serait pas mal.
Virer tous les supports n'a pas été trop difficile, juste quelques bobos aux doigts mais rien de grave

voici tout de même quelques photos de se qu'aurait pu être Glenn
PS : je rappel qu'il n'y a que la partie central, il est incomplet, il aurait fallu les deux autres parties pour maintenant les bras.


...au moins je sais maintenant ce que je dois corriger, du moins avec la pièce en mains on s’aperçoit rapidement des erreurs, là, c'est du concret on va dire ^^
Va falloir racheter de la bobines lol
#859
Donovandu88
-

- Membres
-
- 680 messages
Membre passionné
- Gender:Male
Posté 02 avril 2019 - 06:10
Jolie, en ABS ta pièce serait sûrement plus légère.
#860
Oracid
-
- Modérateur
-
- 7â¯030 messages
Pilier du forum
- Gender:Male
Posté 02 avril 2019 - 06:29
Magnifique ! Vraiment !
Oui, gagner 100g sur 600g, c'est important.
Avec les servos, tu vises quel poids ?
J'ai reçu des servos de 35kg.cm et bien comme par enchantement mon quadrupède qui plantait aujourd'hui marche pas mal. Je vais en parler bientôt, bien sûr.
A mon avis, il faut mettre le paquet sur les servos. Le problème, c'est que ce n'est pas donné.
Oui, gagner 100g sur 600g, c'est important.
Avec les servos, tu vises quel poids ?
J'ai reçu des servos de 35kg.cm et bien comme par enchantement mon quadrupède qui plantait aujourd'hui marche pas mal. Je vais en parler bientôt, bien sûr.
A mon avis, il faut mettre le paquet sur les servos. Le problème, c'est que ce n'est pas donné.
Ma chaine YouTube : https://www.youtube..../oracid1/videos






1 utilisateur(s) li(sen)t ce sujet
0 members, 1 guests, 0 anonymous users




