C'est un poste pour avoir des avis/idées pour faire un capteur qui servirait à guider un robot mobile à un endroit précis, une base de rechargement par exemple.
En gros j'aimerai faire un système avec des émetteur et récepteurs infra rouge.
-l'emetteur: il est situé sur le robot, composé de plusieurs leds ir disposées en cercle. L'émetteur doit émettre une lumière ir de manière homogène autour de lui. (Peut être faire tourner l'émetteur sur lui même pour que se soit + homogène ?).
Les récepteurs: il y a 2 groupes de récepteur. Un groupe est composé de plusieurs récepteurs ir disposés en arc de cercle et equidistant.
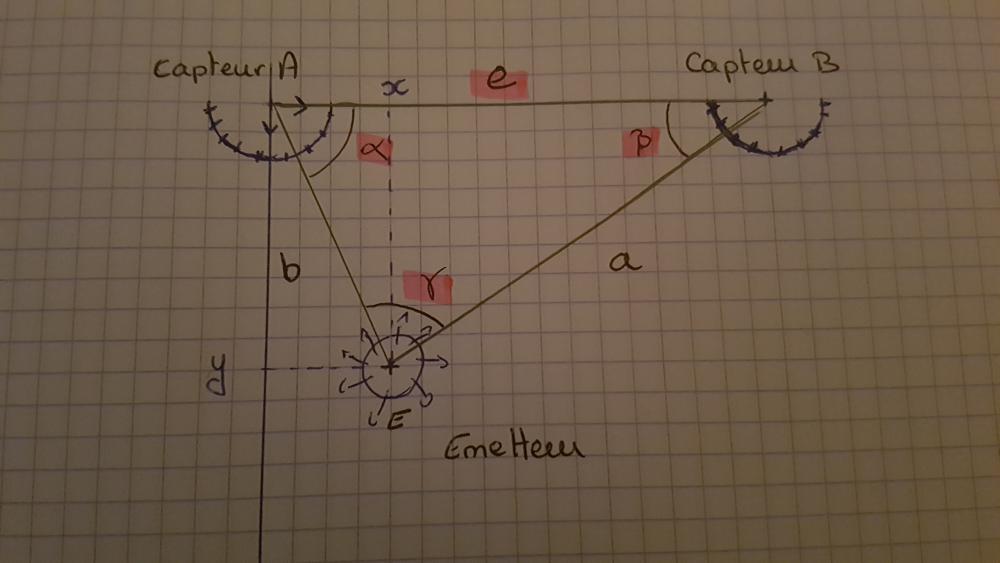
Les 2 groupes sont éloignés d'une longueur connue et plaqués le long d'un mur, par exemple.
La lumière ir va atteindre les 2 groupes de récepteur. Sur chaque groupe, la où la réception ir sera la plus importante indiquera la direction de l'émetteur.
Les directions des 2 groupes de récepteur forment 2 droites (a et b ) qui se croiseront la ou est l'émetteur.
Une fois arrivé ici, c'est la même chose que ce que j'ai utilisé pour la vision de mon robot ^^
Donc la question:à votre avis, est ce qu' un groupe de récepteur comme je l'ai décrit est capable de me donner la direction d'un tel émetteur ?
Sachant que (je pense..) la résolution du groupe de récepteur dépendra du nombre de récepteur ir ( qui peut être amélioré en bidouillant dans le programme peut-être) et de la distance entre les 2 groupes de récepteur. Un peu comme la stéréo vision finalement.

#1

-
- Modérateur
-

- 1â¯333 messages
Membre chevronné
- Gender:Male
Posté 09 septembre 2016 - 10:00
- Serveurperso aime ceci
#2
-

- Modérateur
-
- 2â¯504 messages
Made By Humans
- Gender:Male
- Location:Paris
Posté 09 septembre 2016 - 10:21
C'est pas comme le sujet triangulation  Où on peut estimer la distance entre le robot et le point de repère. Là c'est l'intersection de 2 droites qui donnent la position. L'enjeu est de limiter l'erreur de calcul des angles de ces 2 droites. En te lisant, il me vient une autre idée qui vient du robot tournesol ou du radar. Imagines que tes points A et B sont sur des servos. En scrutant le zone, l'angle est donné par la position du servo où le signale capté est le plus fort.
Où on peut estimer la distance entre le robot et le point de repère. Là c'est l'intersection de 2 droites qui donnent la position. L'enjeu est de limiter l'erreur de calcul des angles de ces 2 droites. En te lisant, il me vient une autre idée qui vient du robot tournesol ou du radar. Imagines que tes points A et B sont sur des servos. En scrutant le zone, l'angle est donné par la position du servo où le signale capté est le plus fort.
#3
-
- Modérateur
-
- 1â¯333 messages
Membre chevronné
- Gender:Male
Posté 09 septembre 2016 - 10:57
un tas d'ampli aussi.Par contre il faudrait attendre que chaque servo ait fini de scruter la zone pour être sûr d'avoir la direction la plus lumineuse avant de recommencer un cycle? En gros on gagne en précision mais on perd en vitesse de rafraîchissement.
Ou alors à la place des servos, un moteur cc avec codeur ou moteur pap, et faire une étape initiale pour avoir un angle de référence. Et on fait tourner les moteurs aussi vite que possible ^^
#4
-

- Modérateur
-
- 7â¯030 messages
Pilier du forum
- Gender:Male
Posté 10 septembre 2016 - 07:15
Ma chaine YouTube : https://www.youtube..../oracid1/videos
#6
-
- Modérateur
-
- 2â¯504 messages
Made By Humans
- Gender:Male
- Location:Paris
Posté 10 septembre 2016 - 08:55
Question, si tu utilise un cc ou un stepper, comment tu alimente les recepteurs lumineux ? Il existe des prises avec des brosses pour permettre la rotation ?? Si oui, je trouverai cela très intéressant !!
#7
-
- Modérateur
-
- 1â¯333 messages
Membre chevronné
- Gender:Male
Posté 10 septembre 2016 - 09:11
Ou alors 2 petits roulements le long d'un axe en plastique ?
Enfin faut pas que les mesures soient parasitées.
D'ailleurs pour chaque angle il faudrait faire une mesure sans les leds ir puis une mesure avec les leds ir, pour éliminer les ir ambiants !
#8
-
- Modérateur
-
- 2â¯504 messages
Made By Humans
- Gender:Male
- Location:Paris
#10
-
- Modérateur
-
- 2â¯504 messages
Made By Humans
- Gender:Male
- Location:Paris
Posté 10 septembre 2016 - 10:02
Pour l'assemblage, avec un moteur, je trouve pas ça simple. A moins de faire passer l'axe du moteur dans le collecteur tournant.
Avec ce modèle, ça ressemble à ton plateau tournant
https://forums.adafr...t=51253#p259090
Ton projet ressemble aussi à ce tracker. http://www.peely.com/my-antenna-tracker/.Il a placé le collecteur au dessus de l'axe du moteur. Mais encore une fois, je trouve très intéressant mais pas simple. Mais je vais encore être très curieux de te suivre ^^

#13
-

- Administrateur
-
- 10â¯340 messages
Staff Robot Maker
- Gender:Male
- Location:Anglet
- Interests:Robotique, Entrepreneuriat, Innovation, Programmation, Résolution de problème, Recherche de solutions, Mécanique, Electronique, Créer, Concevoir
Posté 10 septembre 2016 - 11:12
Hé hé , c'est exactement le sujet d'étude qu'on a proposé à notre dernier stagiaire 
Le but était de faire un télémétre laser rotatif visant à 100 m Bon il a été bien encadré, et c'est encore à paufiner un peu mais ça marche plutôt bien L'amélioration de ce capteur motorisé sera sans doute un des sujet de stage qu'on peut proposer cette année
l'appel à candidature : http://www.robot-maker.com/forum/topic/10628-appel-a-candidature/#entry73069
Pour avoir un peu plus de détail sur le robot : http://www.octopusrobots.com/
Le télémètre laser rotatif est dans la bulle sur le dessus
Si mon commentaire vous a plus laissez nous un avis ! 
Nouveau sur Robot Maker ?
Jetez un oeil aux blogs, aux tutoriels, aux ouvrages, au robotscope aux articles, à la boutique et aux différents services disponible !
En attendant qu'une bibliothèque de fichiers 3D soit mise en place n'hésitez pas à demander si vous avez besoin du fichier 3D d'un des produits de la boutique... On l'a peut être !
Si vous souhaitez un robot pilotable par internet n'hésitez pas à visiter www.vigibot.com et à lire le sous forum dédié à vigibot!
#15
-
- Modérateur
-
- 1â¯333 messages
Membre chevronné
- Gender:Male
Posté 10 septembre 2016 - 11:26
La ce système donne juste la localisation du robot par rapport à un repère, on obtient pas d'information sur l'environnement du robot. La porté sera à quelque mètre seulement du capteur je pense ^^
#16
-
- Modérateur
-
- 1â¯333 messages
Membre chevronné
- Gender:Male
Posté 10 septembre 2016 - 06:43
Avec ce genre de led ir :

La tête du radar qui contient les 2 récepteurs
#17
-
- Administrateur
-
- 10â¯340 messages
Staff Robot Maker
- Gender:Male
- Location:Anglet
- Interests:Robotique, Entrepreneuriat, Innovation, Programmation, Résolution de problème, Recherche de solutions, Mécanique, Electronique, Créer, Concevoir
Posté 10 septembre 2016 - 08:45
Mike du coup ça te donne une carte en nuage de point ?
oui
Si mon commentaire vous a plus laissez nous un avis !
Nouveau sur Robot Maker ?
Jetez un oeil aux blogs, aux tutoriels, aux ouvrages, au robotscope aux articles, à la boutique et aux différents services disponible !
En attendant qu'une bibliothèque de fichiers 3D soit mise en place n'hésitez pas à demander si vous avez besoin du fichier 3D d'un des produits de la boutique... On l'a peut être !
Si vous souhaitez un robot pilotable par internet n'hésitez pas à visiter www.vigibot.com et à lire le sous forum dédié à vigibot!
#18
-
- Modérateur
-
- 1â¯333 messages
Membre chevronné
- Gender:Male
Posté 11 septembre 2016 - 06:25
J'ai fait quelques pièces rapidement
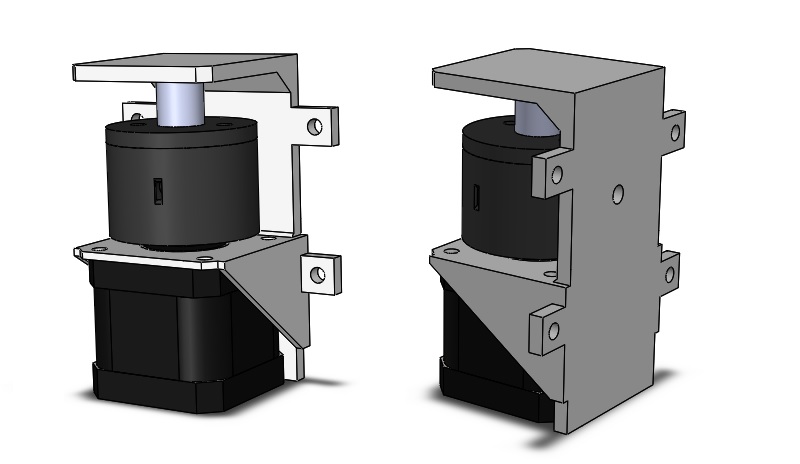
Le trou dernière c'est pour mettre une led ir pour faire une étape initiale (angle 0).
J'ai commandé 2 collecteurs tournant et des phototransistors.
Je continuerai sur ça de temps en temps (chaque chose en son temps^^), mais n'esitez pas à proposer des idées !
#19
-

- Membres
-
- 5â¯724 messages
Pilier du forum
- Gender:Male
- Location:Vendée
- Interests:Robotique, informatique, architecture et patrimoine...
Posté 11 septembre 2016 - 07:18
Pour la base de rechargement, il y avait aussi la solution inverse qui avait été abordé dans un sujet, il y a déjà pas mal de temps.
Imprimante 3D : Prusa i3 (MK1) + CR-10S + CR-10 S5 + Artillery Sidewinder X2 + CR-30 + Elegoo Mars + Anycubic Wash & cure 2 + Phrozen Sonic Mega 8K + Phrozen Cure Mega + Tronxy VEHO 600 PRO
#20
-
- Modérateur
-
- 1â¯333 messages
Membre chevronné
- Gender:Male
Posté 11 septembre 2016 - 09:00
La solution inverse c'est à dire des récepteurs sur le robot et un émetteur sur la balise ?
Répondre à ce sujet









Aussi étiqueté avec au moins un de ces mots-clés : localisation
Découvertes →
Concours tournois et autres compétitions →
Coupe de France de robotique / Eurobot →
Localisation du robot sur la table de la coupe de france de robotiqueDébuté par Laborare, 26 sept. 2019 |
|

|
||
Sujets généraux →
Programmation →
Localisation par triangulationDébuté par Henri4, 21 déc. 2018 |
|

|
||
Projets et réalisations, robots et machines en tout genre →
Robots roulants, chars à chenilles et autres machines sur roues →
Robot chercheurDébuté par Lucky, 27 mars 2018 |
|

|
||
Sujets généraux →
Physique et mathématique →
Localisation indoorDébuté par ashira, 08 nov. 2017 |
|

|
||
Sujets généraux →
Programmation →
Localisation avec un simple capteur ultrasonDébuté par Knightmare, 17 oct. 2017 |
|

|
0 utilisateur(s) li(sen)t ce sujet
0 members, 0 guests, 0 anonymous users

