La solution inverse : il y avait au minimum deux balises (émetteurs IR) pour la base de rechargement et un seul récepteur sur le robot.
Je n'ai pas retrouvé le sujet et je ne sais pas le projet était terminé.

Pilier du forum


Posté 11 septembre 2016 - 09:20
La solution inverse : il y avait au minimum deux balises (émetteurs IR) pour la base de rechargement et un seul récepteur sur le robot.
Je n'ai pas retrouvé le sujet et je ne sais pas le projet était terminé.
Imprimante 3D : Prusa i3 (MK1) + CR-10S + CR-10 S5 + Artillery Sidewinder X2 + CR-30 + Elegoo Mars + Anycubic Wash & cure 2 + Phrozen Sonic Mega 8K + Phrozen Cure Mega + Tronxy VEHO 600 PRO
Membre chevronné
Posté 11 septembre 2016 - 10:12

Pilier du forum
Posté 11 septembre 2016 - 10:28
Je me demande si on ne peut pas connaître α et β si tu utilise un servo pour positionner ton capteur.
Imprimante 3D : Prusa i3 (MK1) + CR-10S + CR-10 S5 + Artillery Sidewinder X2 + CR-30 + Elegoo Mars + Anycubic Wash & cure 2 + Phrozen Sonic Mega 8K + Phrozen Cure Mega + Tronxy VEHO 600 PRO
Staff Robot Maker

Posté 12 septembre 2016 - 09:10
Je crois qu'il faut un 3eme point lumineux si on met le capteur sur la partie mobile
En effet ... car la position " miroir" donne exactement les mêmes angles pour seulement 2 points lumineux =)
Si mon commentaire vous a plus laissez nous un avis ! 
Nouveau sur Robot Maker ?
Jetez un oeil aux blogs, aux tutoriels, aux ouvrages, au robotscope aux articles, à la boutique et aux différents services disponible !
En attendant qu'une bibliothèque de fichiers 3D soit mise en place n'hésitez pas à demander si vous avez besoin du fichier 3D d'un des produits de la boutique... On l'a peut être !
Si vous souhaitez un robot pilotable par internet n'hésitez pas à visiter www.vigibot.com et à lire le sous forum dédié à vigibot!
Membre chevronné
Posté 12 septembre 2016 - 07:59
Habitué

Posté 13 septembre 2016 - 10:30
Salut,
Une question surement bête, mais si tu veux (d'après ton use case) retourner à un point précis, pourquoi tu veux faire une triangulation ou autre?
je m'explique, un système avec trois balises ça marche bien pour savoir ou l'on se trouve relativement aux balises et donc avec un emplacement connu des blaises avoir sa position dans un espace donné. C'est ce qui est implémenté par beaucoup des robots à la coupe de france de robotique par exemple et ça permet de se positionner sur des tables pas bien grande.
Mais toi ce que tu veux c'est pas dire mon robot il est la ou la, mais il faut que j'aille ici, et c'est plus la même problématique, ça simplifie énormément le problème! Une balise style laser qui emet son signal mettons vers le plafond, sur ton robot un capteur (rotatif) un peu précis (de l'ordre d'une dizaine de degrès je dirai au pif ), et tu vises la balise et tu t'en rapproches.
Plus tu va st'approcher, moins tu seras précis mais justement, si tu a caréné ta diode de détection pour faire un cone relativement fin, il sera facile d'arriver jusqu'à la borne, et la un capteur de proximité permet de finir le boulot.
Si, c'est pas assez précis, on peut même penser à un capteur "large" pour s'approcher rapidemment de la borne puis un même capteur réglé beaucoup plus fin pour les derniers "pas".
Ou quelquechose comme ça : http://www.pobot.org/Balise-lumineuse-simple.html, qui reste dans la même idée.
ou ca http://www.totofweb.net/robots-projet-67.html.
SI tu veux rester dans le cadre de la localisation 2d, il existe aussi la localisation UWB qui permet d'etre centimétrique, mais nécessite un peu de mise en oeuvre!
Membre chevronné
Posté 13 septembre 2016 - 12:26
Membre chevronné
Posté 18 septembre 2016 - 12:16
Un peu de nouvelles sur ce radar!
J'ai monté un phototransistor sur la tête du radar et je lui fais parcourir 180°.
J'ai fait l'acquisition du signal et pour l'instant ça à l'air d'être pas trop mal, j'ai fait une video.
Mon émetteur c'est le truc blanc et noir (j'ai coupé une balle de ping pong pour faire un dome ^^).
Je fais l’acquisition avec des Serial.print() ce qui m’empêche d'aller vite, mais sinon je peux obtenir 2 ou 4 fois plus de mesures pour le même balayage !
On voit aussi qu'il y a du bruit, je l'ai filtré avec des petits condensateurs en céramique. Ce qui m'embête c'est que les collecteurs que j'ai commandé génèrent un bruit de 10mW d'après la doc et mon signal à l'air de ne pas être puissant. Est ce que ça veut dire que je vais devoir amplifier l'intensité du signal avant de passer par les collecteurs ?
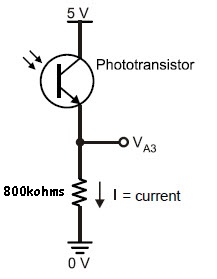
Voila comment je récupère mon signal. Je suis obligé de mettre une grande résistance pour avoir une grande amplitude de tension.
Staff Robot Maker
Posté 18 septembre 2016 - 03:30
Et si tu essayes de mettre ta résistance en pull up et ton photo transistor en émetteur commun ? Ok ça va inverser la logique de tes signaux mais est ce que tu aurais pas un peu moins de bruits et une un peu meilleur sensibilité ? =) ( en plus moins dépendant de la valeur de la résistance, genre tu mets une résistance de 10 K ohm )
Si mon commentaire vous a plus laissez nous un avis !
Nouveau sur Robot Maker ?
Jetez un oeil aux blogs, aux tutoriels, aux ouvrages, au robotscope aux articles, à la boutique et aux différents services disponible !
En attendant qu'une bibliothèque de fichiers 3D soit mise en place n'hésitez pas à demander si vous avez besoin du fichier 3D d'un des produits de la boutique... On l'a peut être !
Si vous souhaitez un robot pilotable par internet n'hésitez pas à visiter www.vigibot.com et à lire le sous forum dédié à vigibot!
Membre chevronné
Posté 18 septembre 2016 - 05:02
Ho yeah ça marche déjà mieux !
Le bruit n'apparaissait que lorsque le photo transistor captait l'émetteur, et en rajoutant les mêmes condensateurs que tout à l'heure le résultat est assez lisse!
J'ai essayé 10k mais je n'avais pas de variation donc j'ai remis mes 800k, bizarre ?
Voila ce que ça donne :
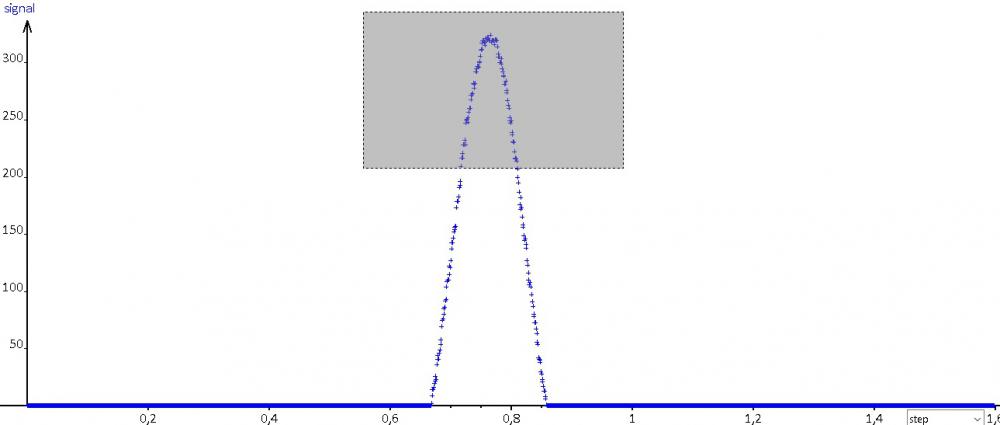
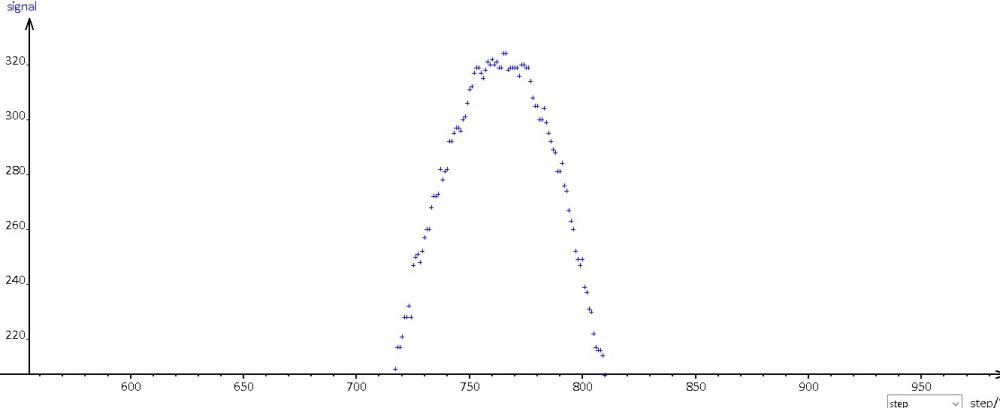
reste à voir ce que ça va donner avec les collecteurs niveau bruit^^
sinon niveau précision, en abscisse c'est le nombre de step sachant que 10 steps représentent 1.125°. Je peux aussi multiplier par 4 la résolution, mais au final comme j'irai beaucoup plus vite, j'aurai moins de point que sur ces images.
Membre chevronné
Posté 11 octobre 2016 - 07:59










Découvertes →
Concours tournois et autres compétitions →
Coupe de France de robotique / Eurobot →
Localisation du robot sur la table de la coupe de france de robotiqueDébuté par Laborare, 26 sept. 2019 |
|

|
||
Sujets généraux →
Programmation →
Localisation par triangulationDébuté par Henri4, 21 déc. 2018 |
|
|
||
Projets et réalisations, robots et machines en tout genre →
Robots roulants, chars à chenilles et autres machines sur roues →
Robot chercheurDébuté par Lucky, 27 mars 2018 |
|

|
||
Sujets généraux →
Physique et mathématique →
Localisation indoorDébuté par ashira, 08 nov. 2017 |
|

|
||
Sujets généraux →
Programmation →
Localisation avec un simple capteur ultrasonDébuté par Knightmare, 17 oct. 2017 |
|

|
0 members, 1 guests, 0 anonymous users



