Je vous présente Émile mon robot humanoïde. Pourquoi Émile ? Parce que "c'est Émile". Pour la liaison entre le T et le É. Pour faire T1000 ... Voilà, ça c'est fait ...
Ce projet fait suite au montage du kit robot humanoïde :
Il contient des Servomoteur TowerPro MG995.
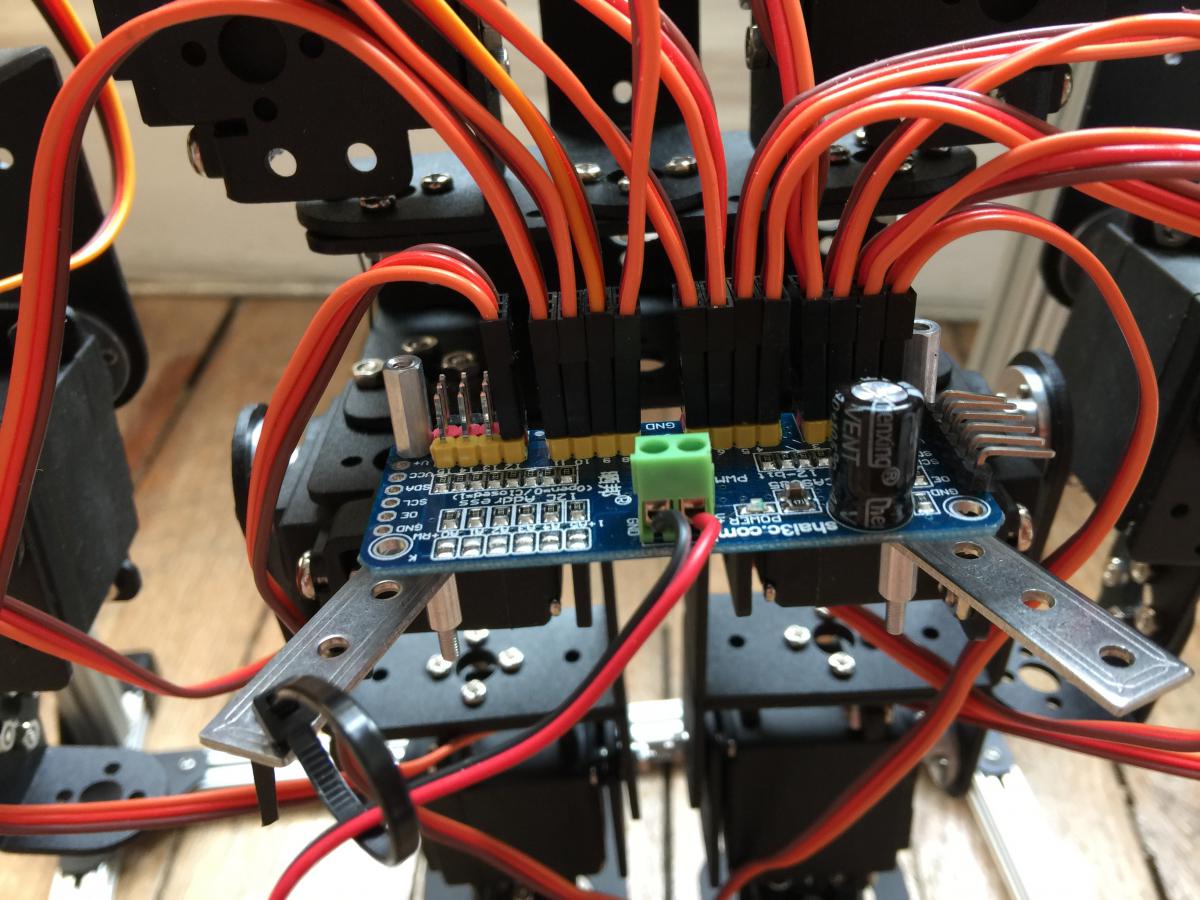
Ils sont pilotés par le Driver I2C pour 16 servomoteurs.
Le projet n'est pas encore alimenté. Je prévoyais d'utiliser une batterie 3,7V de 2500 mAh avec un step-up 5V. Mais c'est insuffisant.  La tension chute à 2,5V dès que j'alimente les 13 moteurs. Aucun ne bouge.
La tension chute à 2,5V dès que j'alimente les 13 moteurs. Aucun ne bouge.
Si je prends la description des servos : 1 450 mA pour 11Kg/cm environ. Si le prend un bras : 18cm, cela limite à 600 grammes. Une jambe : 19,5, cela limite à 500g. Je n'ai pas pu peser les bras et les jambes mais ils ne doivent pas être loin de ces masses.