Hum hum, ben à la consommation
Ce sont des HD-1501MG que j'utilise pour mes tests
Tension d'alimentation : 4.8 ~ 6 V
Tension maximale : 6 V
Par contre "mesurer" je ne sais pas faire 
J'ai deux multimètres si besoin.

Pilier du forum


Made By Humans
Posté 31 janvier 2017 - 12:52
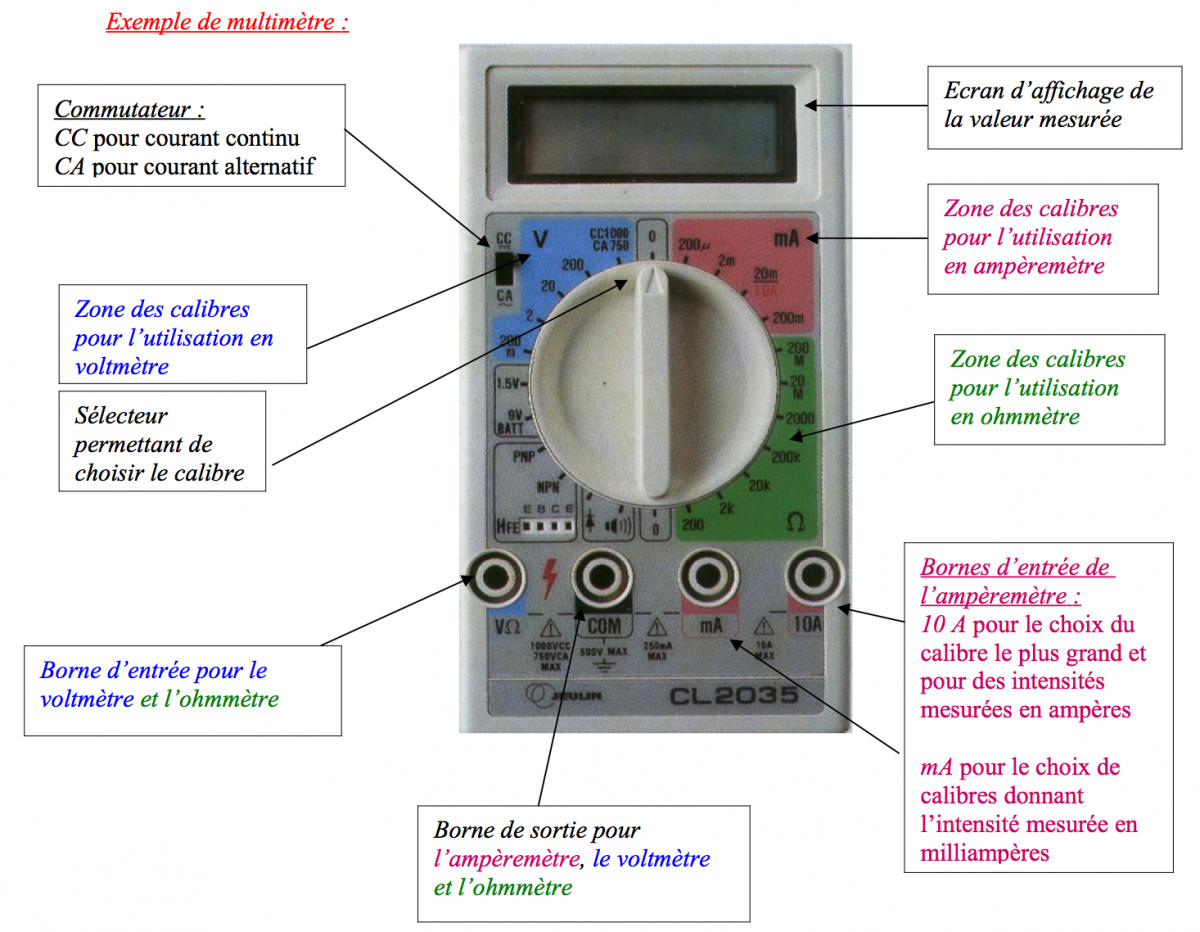
J'ai pas trouvé de tuto ici, sur le forum, pour utiliser un multimètre en ampèremètre. Trouvé dans un pdf sur le net. Il explique très bien.  ct_utiliser_multimetre.pdf 160,62 Ko
422 téléchargement(s)
ct_utiliser_multimetre.pdf 160,62 Ko
422 téléchargement(s)
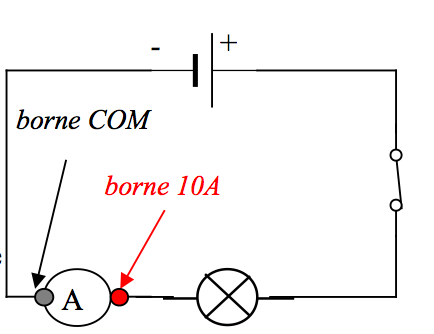
En série et la borne COM sur le (-) du circuit.
Pour ton servo, (
HD-1501MG.pdf 370,86 Ko
264 téléchargement(s)), sur le papier, Il peut consommer jusqu'à 2,3A à 4,8V (courant de blocage).
Je te remercie, j'ai ma réponse  Tu en mets 7 qui fonctionnent en même temps sur le driver 16.
Tu en mets 7 qui fonctionnent en même temps sur le driver 16.
Pilier du forum
Posté 31 janvier 2017 - 01:08
Ah ok, je place le COM à la sortie du servo, et le 10A à l'entrée, et je le fais fonctionner, c'est ça ?
Si c'est le cas, j'ai une question, sur un de tes post tu stipule que tu n'as pas trop le temps de mesurer avec le servo en action car ça va trop vite.
Si on joue avec le temps genre lui dire qu'il met 2 à 3 secondes pour faire 180°, la mesure sera la même ???
Made By Humans
Posté 31 janvier 2017 - 01:28
le COM à la sortie du servo, et le 10A à l'entrée,
L'ampèremètre en série pas en parallèle.
Mon multimètre met un certain temps à afficher une mesure. une fréquence d'affichage de 2 par secondes à peu près. Le servo va plus vite  Mais si tu regarde les mesures dans le temps, tu pourras prendre un maximum. C'est pas super fiable.
Mais si tu regarde les mesures dans le temps, tu pourras prendre un maximum. C'est pas super fiable.
Pilier du forum
Posté 31 janvier 2017 - 07:34
Bon ben, en me plaçant sur le 20m.10A, la plus grosse valeur que j'ai pu obtenir est 0.65 , sinon en moyenne j'ai 0.2 voir 0.25.
J'ai du essayer une bonne quinzaine de fois.
(En revanche désolé j'ai pas pris le temps de voir comment bien lire l’ampèremètre, le pire c'est que je le savais, et j'ai oublié, snif, honte à moi)
J'espère que ça peux t'aider.
Ps : c'est clair qu'un tuto tous simple pour apprendre à se servir d'un multimètre et savoir le lire ne sera pas de trop, cela peut paraître simple pour certains, mais perso j'ai une mémoire qui (zut j'ai oublié se que je voulais dire), ah ouais, qui me fait défaut par moment ^^
Merci
Made By Humans
Posté 31 janvier 2017 - 08:22
Merci Oliver
Made By Humans
Posté 01 février 2017 - 05:31
Alors, à priori, je pars sur ce type de montage : alimentation unique 12V et arduino mega. C'est vrai que ma première idée était un peu sur évaluée. Ceci dit, je ne vais pas mettre 2 driver 16 servos et j'ai besoin de la mémoire de programme du mega qui suffit à piloter les 13 servos.
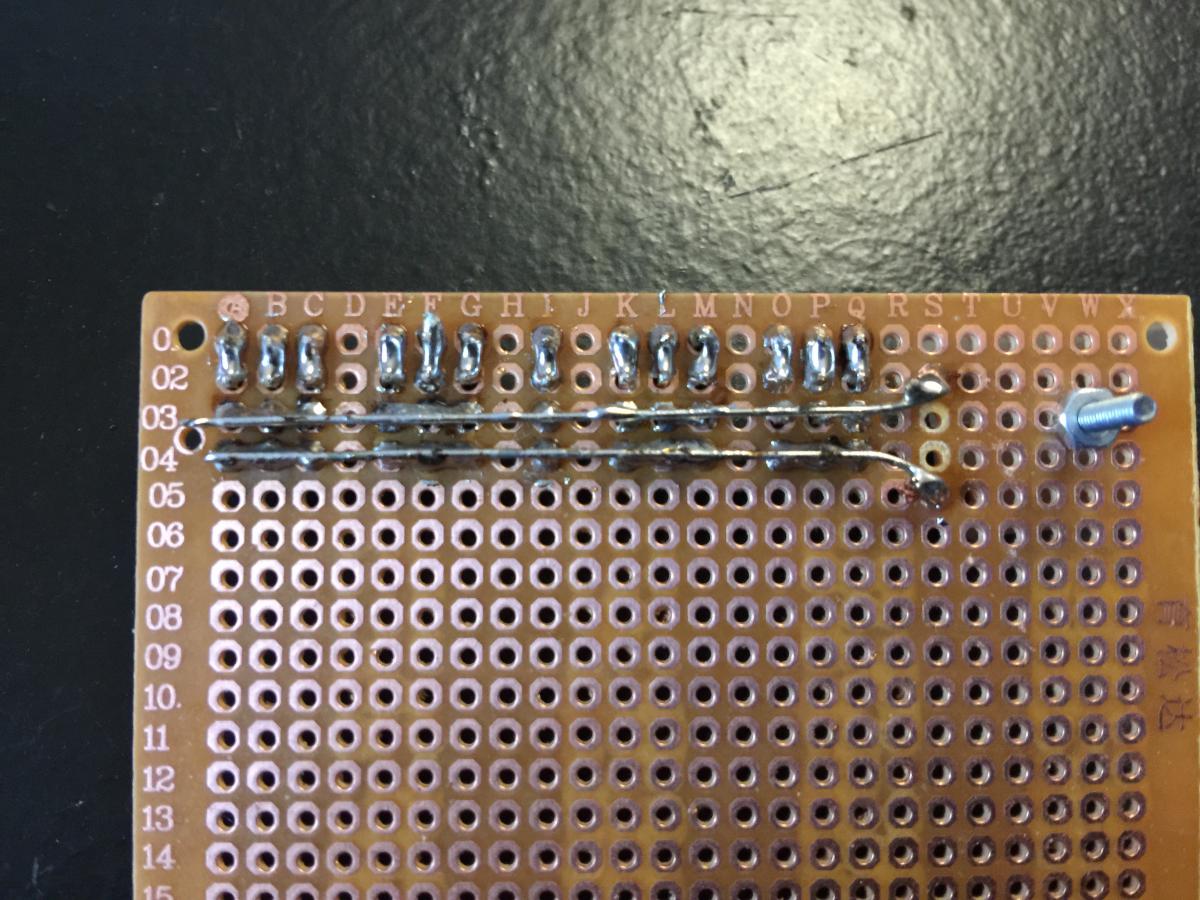
La recharge se fait en une fois, je simplifie le câblage avec quelques soudures sur une veroboard et je diminue le poids.
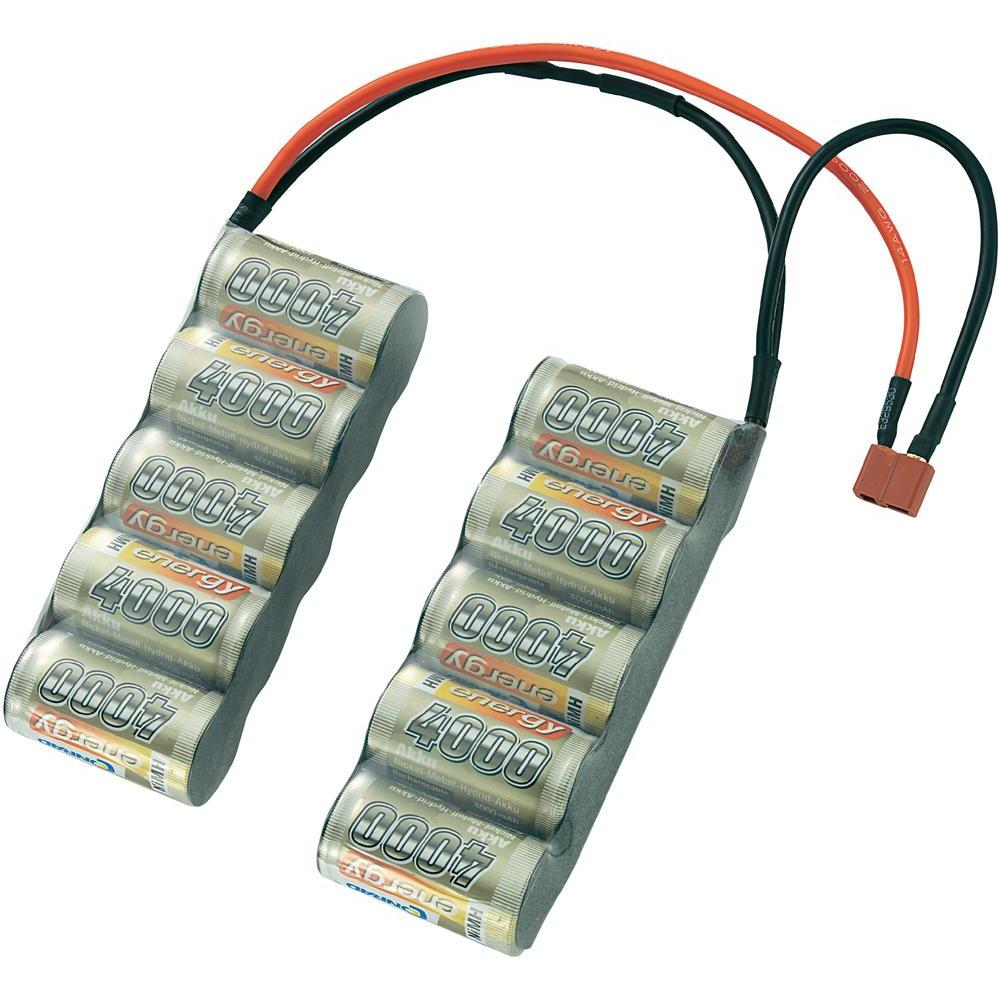
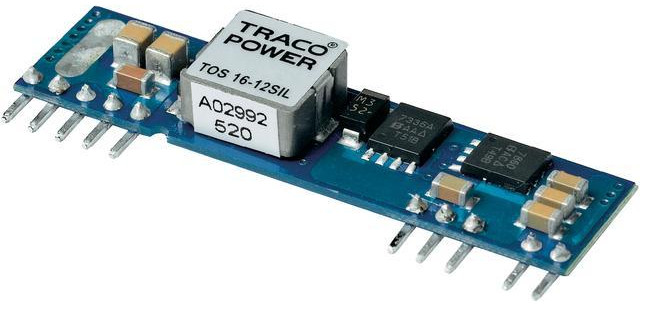
J'ai trouvé ces composants.
. Ça ajoute 415g c'est moitié moins que ma première solution.NB. Le format AA qui rentre dans le tronc à l'horizontal n'a que 3 C pour 2300mAh soit 6,9A max. Ceux-là auraient été bien planqués.
Voltmètre embarqué et interrupteur, j'ai.
Ça va lui faire un bon sac à dos.
En espérant que je me suis pas trompé dans les calculs. Il est tard.
Modifié par Path, 01 février 2017 - 04:19 .
Pas 5000 mais 4000 mAh 20C -> 80A
Pilier du forum
Posté 01 février 2017 - 11:08
Perso se qui me déprime c'est l'autonomie, (je parle en général pour les robots), c'est frustrant je trouve, on va jouer 30 mn avec et là plus rien...
...recharger pendant X temps, 30 mn et plus rien etc etc
Snif
Un jour peut être existera t'il une solution plus intéressante.
(des hamsters dans une roue avec une dynamo lol)
Made By Humans
Posté 01 février 2017 - 01:30
Alors en vrai, avec les 4000 mAh (que je connais déjà avec Ash et Hector), ce sera bien plus que 30 min. Et mon calcul est en mode "bon père de famille".
Il faut de toutes les façons une alimentation de développement. Je vais pas utiliser les batteries pendant la phase de codage, c'est trop long.
Il est aussi facile de faire un câblage électrique qui te permet d'alimenter le robot sans la motorisation pendant que ça charge.
Le dernier point, concerne les limites angulaires des servos. Hier, j'ai testé avec l'ampèremètre branché. Les servos consomme beaucoup plus quand ils sont commandés à leurs limites. L'ampèremètre m'a permis de voir la plage de consommation normal. Elle plus courte que la limite physique mais je vais gagner de bon gros Ah.
Made By Humans
Posté 02 février 2017 - 04:42
Tout est commandé.
Le sac à dos.
Le convertisseur DC DC
Le driver i2c 16 servo va me servir dans un autre projet.
Voilà comment je vais le remplacer
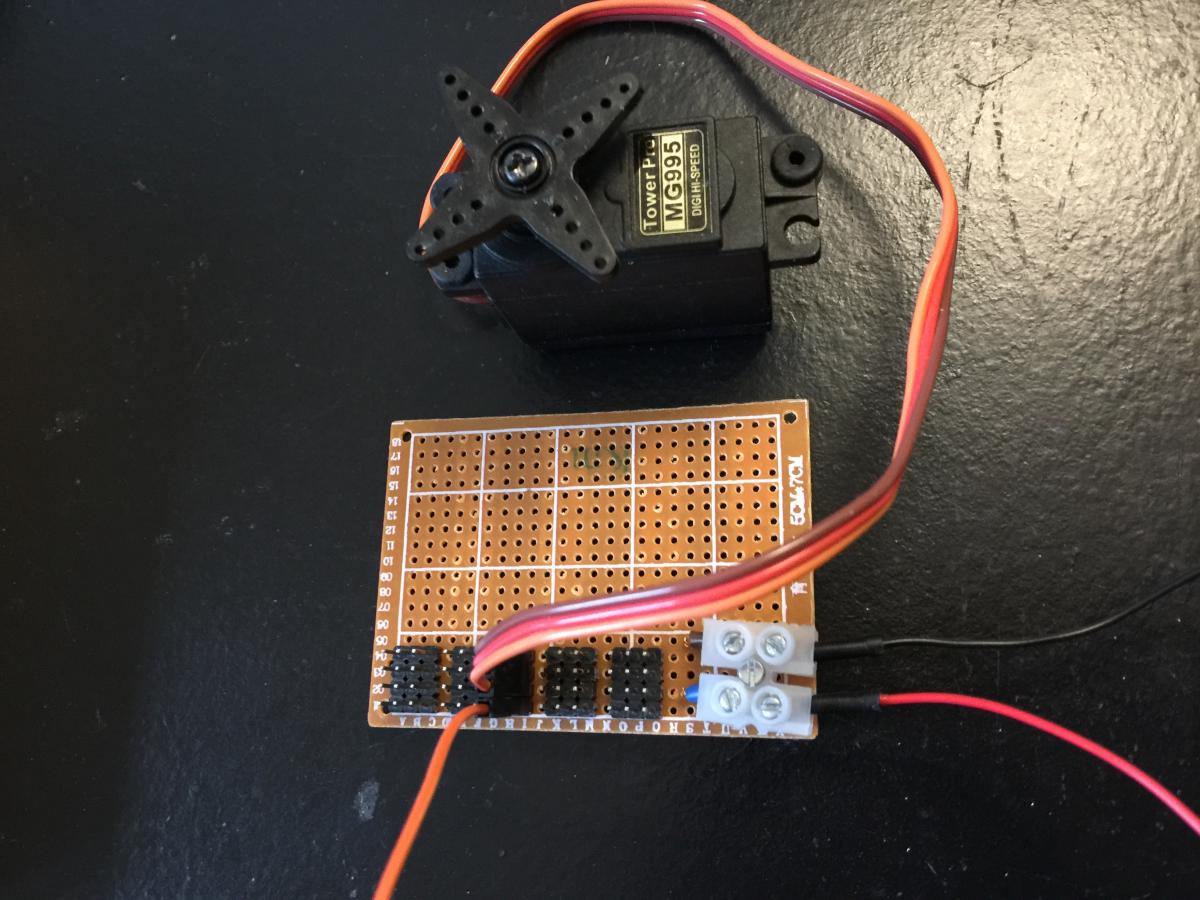
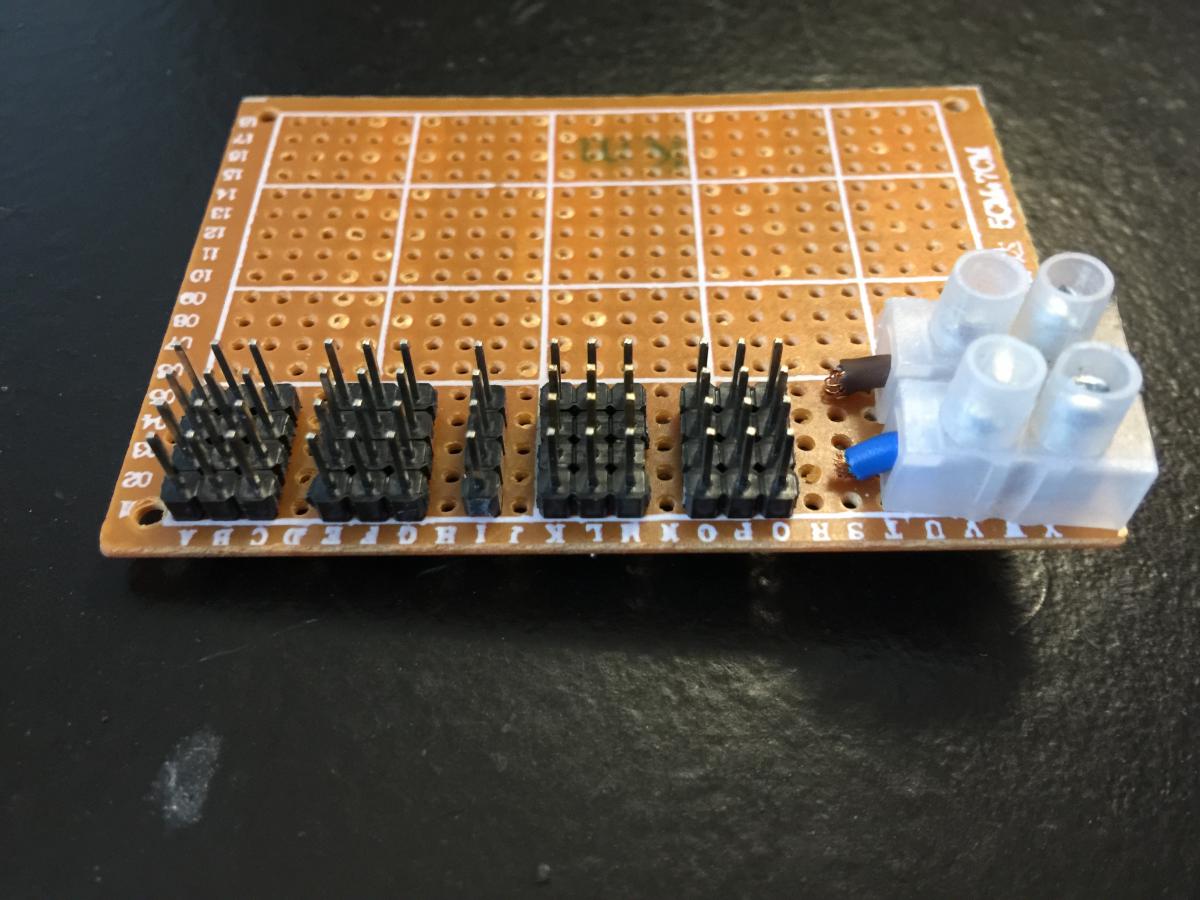
Là j'ai bien ramé, rien ne se touche. Je vais pas avoir des pb d'arc électrique avec mes 10~16 A ?
Le tout sera piloté par une mega. Pour l'instant, je ne prévois pas de raspberry.
Il aura un visage (ou juste des infos de debug) avec ça :

Pour finir, il aura besoin de capteurs.
Je kiffe !!
Membre chevronné

Posté 02 février 2017 - 04:48
Made By Humans
Posté 02 février 2017 - 04:52
Merci, tu m'as rassuré
J'ai passé plus de temps à tester les connections et les non-connections qu'à souder.
Il sera installé sur un plexiglass pour le protéger.
Made By Humans
Posté 26 février 2017 - 05:22
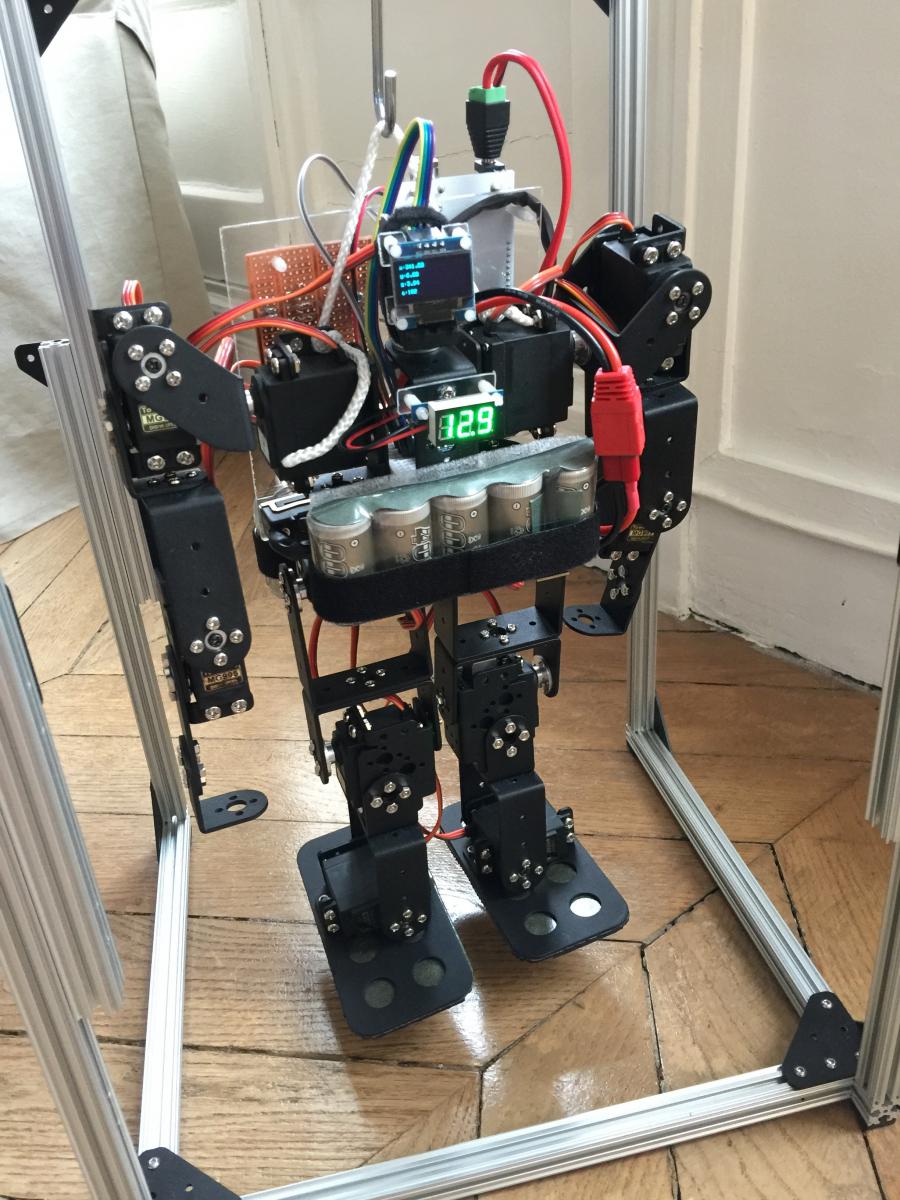
Voilà quelques nouvelles.
En ce moment, le boulot ne me permet pas d'aller aussi vite que je voudrai
Finalement, les batteries vont mieux sur le ventre et les fessiers que placées sur les omoplates.
De face,
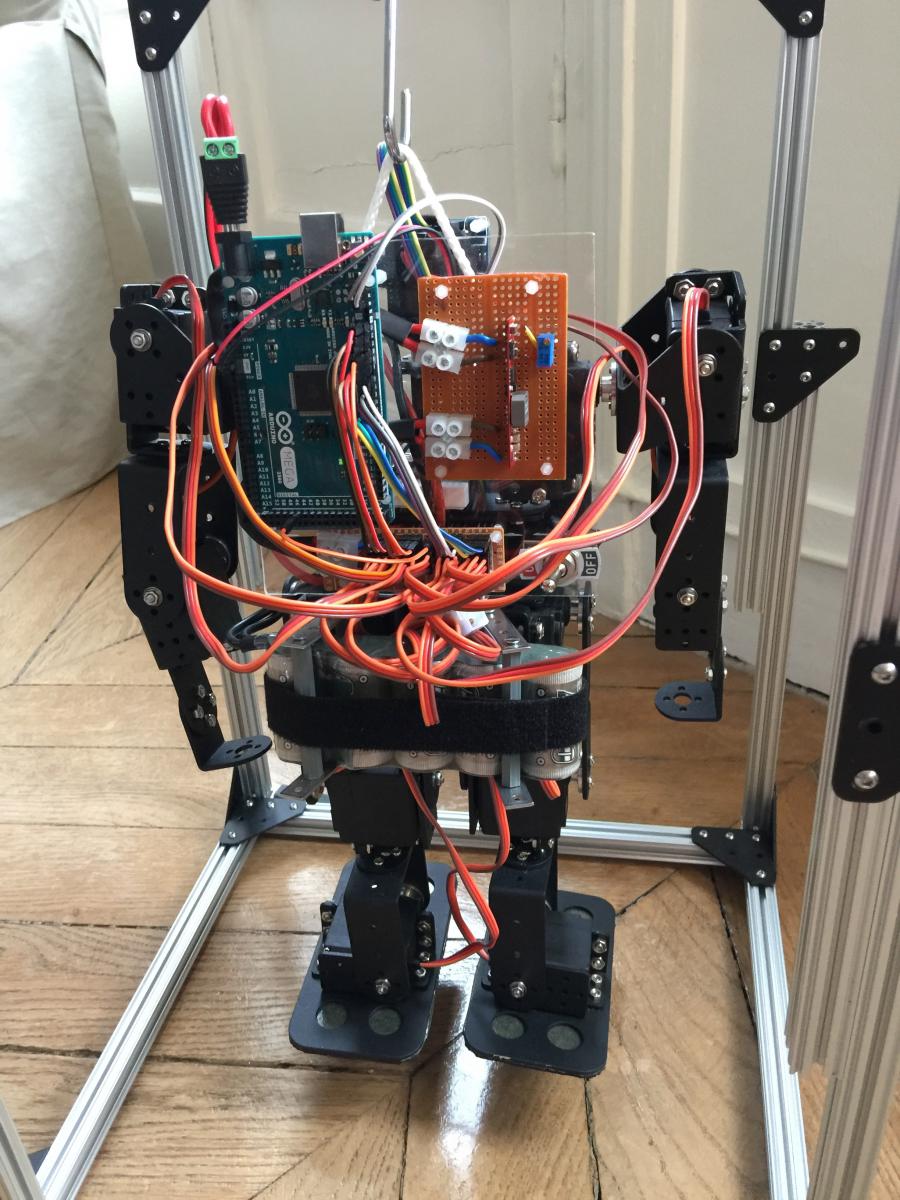
De dos,
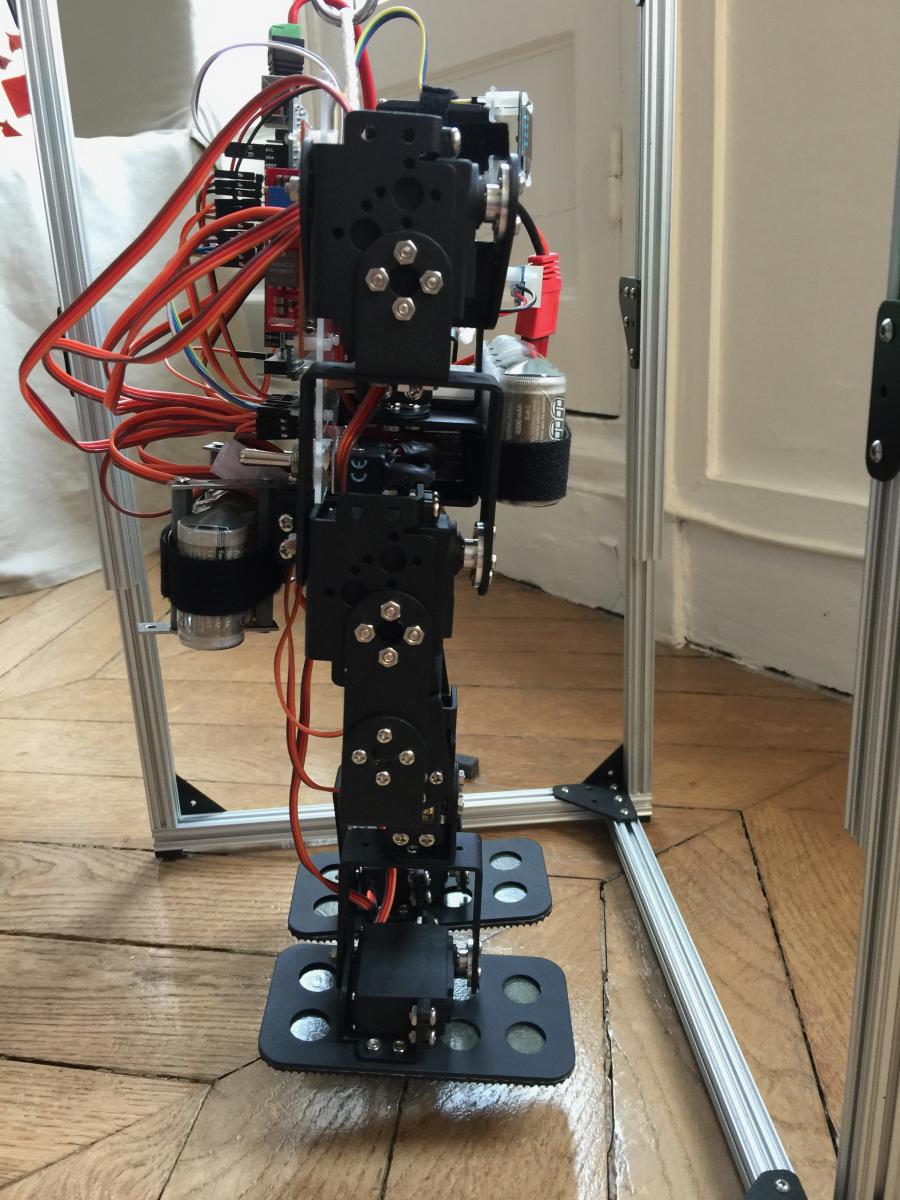
De profile,
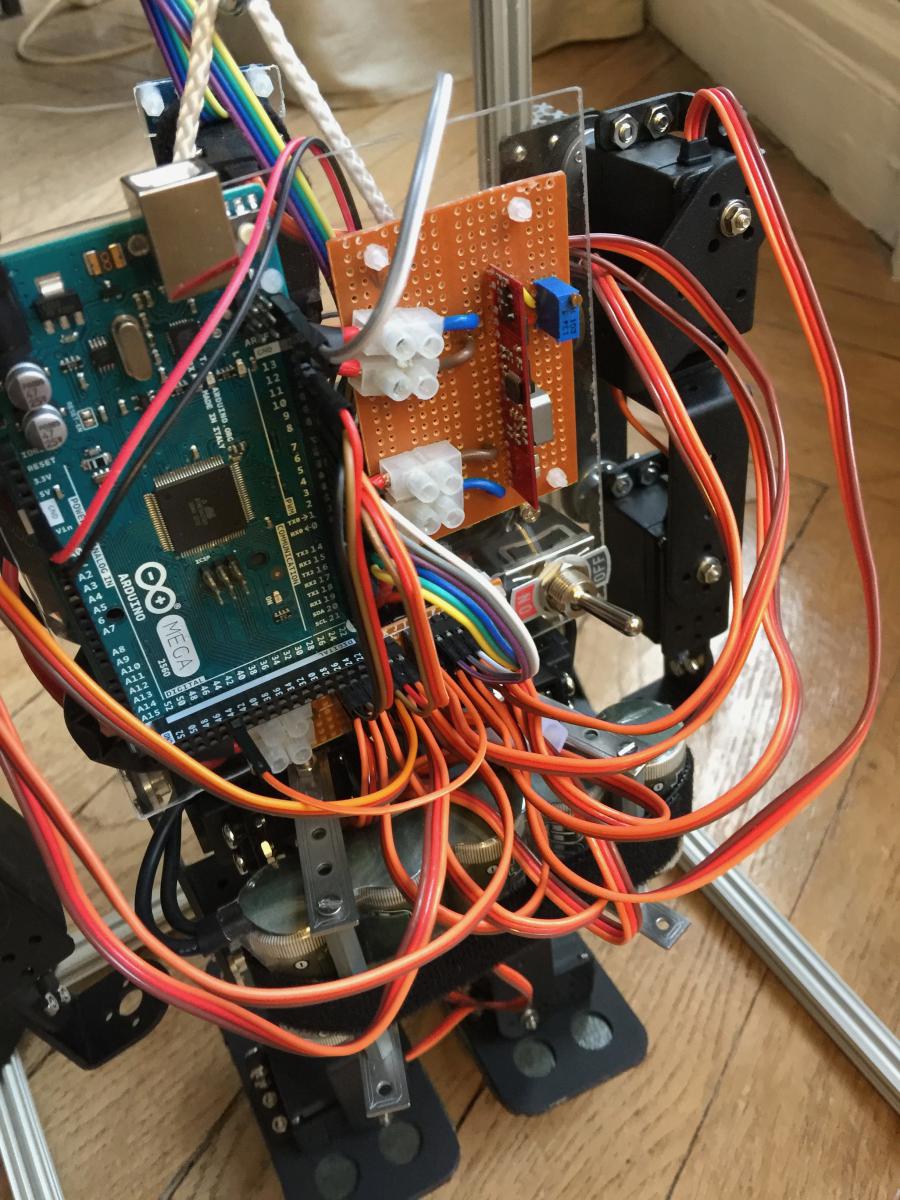
Le BNO dans le tronc, l'écran sur le visage et le voltmètre sur le torse.
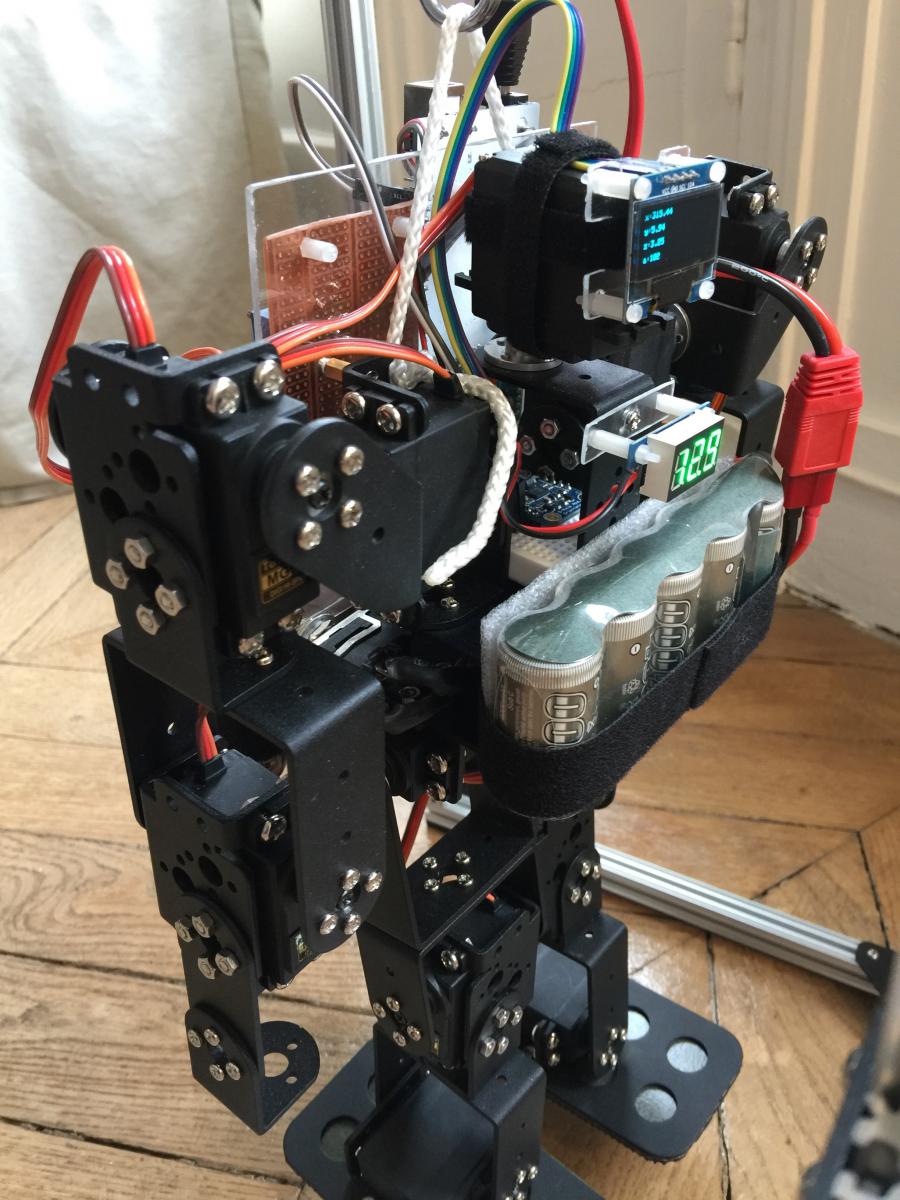
C'est vraiment le bordel tous ces câbles !!
Aller, j'attaque le code !!
Made By Humans
Posté 26 février 2017 - 05:35
Merci !!! Je kiffe à donf
Il est assez alourdi (j'ai toujours rien pour peser :/ ) Mais les batteries et le montage d'alimentation me permettent d'utiliser le potentiel des servos.
Je vais bientôt vérifier par la pratique, le verdict du monde réel ^^
Membre occasionnel

Posté 26 février 2017 - 05:39
Super avancement, vivement les premiers pas de ton robot Émile !
Tu peux utiliser des serre-câbles pour le dos.
Mace Robotics - Conception & réparation électronique
Staff Robot Maker

Posté 26 février 2017 - 05:45
Tu peux utiliser des serre-câbles pour le dos.
C'est marrant de parler de ça : des serre-câbles arrivent dans environ 2 semaines sur le shop =)
En tout cas super les avancements Bonne continuation pour la suite =)
Si mon commentaire vous a plus laissez nous un avis ! 
Nouveau sur Robot Maker ?
Jetez un oeil aux blogs, aux tutoriels, aux ouvrages, au robotscope aux articles, à la boutique et aux différents services disponible !
En attendant qu'une bibliothèque de fichiers 3D soit mise en place n'hésitez pas à demander si vous avez besoin du fichier 3D d'un des produits de la boutique... On l'a peut être !
Si vous souhaitez un robot pilotable par internet n'hésitez pas à visiter www.vigibot.com et à lire le sous forum dédié à vigibot!
Made By Humans
Posté 26 février 2017 - 05:47
, je manquerai pas de vous montrer ça.
Pilier du forum

Posté 26 février 2017 - 06:40
Ma chaine YouTube : https://www.youtube..../oracid1/videos








0 members, 0 guests, 0 anonymous users


