

Et tu aurais du faire des avant-trous avant de fixer tes crochets de fermeture...

348 réponses à ce sujet
#121

levend
-

- Membres
-

- 5â¯726 messages
Pilier du forum
- Gender:Male
- Location:Vendée
- Interests:Robotique, informatique, architecture et patrimoine...
Posté 19 avril 2017 - 07:05
Imprimante 3D : Prusa i3 (MK1) + CR-10S + CR-10 S5 + Artillery Sidewinder X2 + CR-30 + Elegoo Mars + Anycubic Wash & cure 2 + Phrozen Sonic Mega 8K + Phrozen Cure Mega + Tronxy VEHO 600 PRO
#122
Donovandu88
-
- Membres
-
- 680 messages
Membre passionné
- Gender:Male
Posté 19 avril 2017 - 07:09
Oui, maintenant que tu as fait les trous, cela ne vaudrait pas le coup.
Oui, je pourrais éventuellement mettre de la pâte à bois.
Et tu aurais du faire des avant-trous avant de fixer tes crochets de fermeture...
Oui j'y ai pensé après 
Le travail du bois c'est pas mon fort, arrêtez de me gronder 
#123
levend
-
- Membres
-
- 5â¯726 messages
Pilier du forum
- Gender:Male
- Location:Vendée
- Interests:Robotique, informatique, architecture et patrimoine...
Posté 19 avril 2017 - 07:13
Non, vois ma remarque comme un conseil pour la prochaine fois.
- Donovandu88 aime ceci
Imprimante 3D : Prusa i3 (MK1) + CR-10S + CR-10 S5 + Artillery Sidewinder X2 + CR-30 + Elegoo Mars + Anycubic Wash & cure 2 + Phrozen Sonic Mega 8K + Phrozen Cure Mega + Tronxy VEHO 600 PRO
#125
levend
-
- Membres
-
- 5â¯726 messages
Pilier du forum
- Gender:Male
- Location:Vendée
- Interests:Robotique, informatique, architecture et patrimoine...
Posté 22 mai 2017 - 10:09
Ils fournissent tous les fichiers nécessaire tel que les STL's, les fichiers 3D Solidworks, une BOM, un manuel utilisateur pour l'assemblage et un firmware Marlin modifié pour contrôler 3 axes du robot (je ne m'en servirai pas).
Quel est l'utilisation prévue pour ce firmware sur ce bras ?
Imprimante 3D : Prusa i3 (MK1) + CR-10S + CR-10 S5 + Artillery Sidewinder X2 + CR-30 + Elegoo Mars + Anycubic Wash & cure 2 + Phrozen Sonic Mega 8K + Phrozen Cure Mega + Tronxy VEHO 600 PRO
#126
Donovandu88
-
- Membres
-
- 680 messages
Membre passionné
- Gender:Male
Posté 23 mai 2017 - 07:33
Juste pour tester les mouvements de trois axes grâce à un logiciel comme Repetier-Host ou Pronterface.
Sinon ne vous inquiétez pas le projet est toujours en route, c'est juste que maintenant j'ai moins de temps à lui consacrer.
#127
Donovandu88
-
- Membres
-
- 680 messages
Membre passionné
- Gender:Male
Posté 03 juin 2017 - 12:29
Salut 
Je reviens vers vous pour vous demander un peut d'aide car pour le branchement de l'écran sur l'Arduino MEGA, je sèche.
J'ai effectué ce branchement sur l'Arduino UNO et c'est fonctionnel :
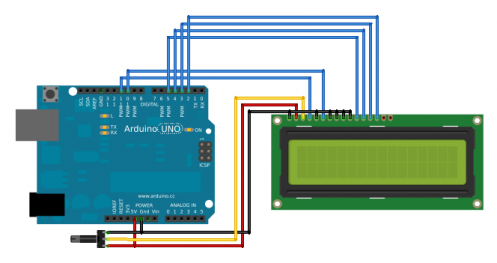
Voici le petit code qui va avec du tuto (http://eskimon.fr/26-arduino-701-les-ecrans-lcd) :
#include "LiquidCrystal.h" //ajout de la librairie
//Vérifier les broches !
LiquidCrystal lcd(11,10,9,8,7,6,5,4,3,2); //liaison 8 bits de données
LiquidCrystal lcd(11,10,5,4,3,2); //liaison 4 bits de données
void setup()
{
lcd.begin(16,2); //utilisation d'un écran 16 colonnes et 2 lignes
lcd.write("Salut les Zer0s !"); //petit test pour vérifier que tout marche
}
void loop() {}
Jusque la, pas de problème, maintenant je branche le même écran (16x2) sur mon Arduino MEGA de la manière suivante :
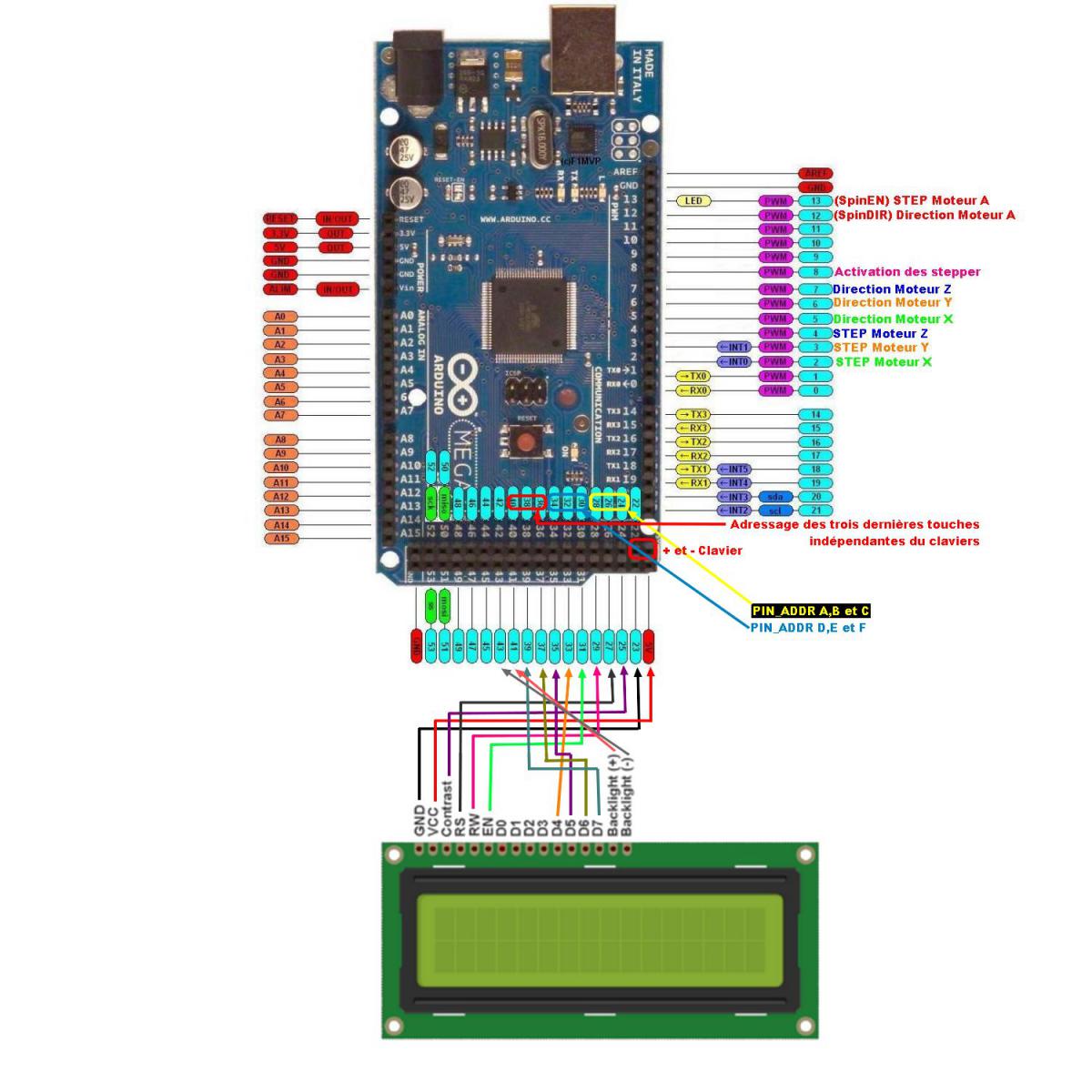
(en gros tout les pins sont brancher à la suite du 5V à la broche 43)
Et voici mon code pour le faire fonctionner :
#include "LiquidCrystal.h"
LiquidCrystal lcd(27,31,33,35,37,39);
void setup(){
//*************** LCD ******************
lcd.begin(16,2); //utilisation d'un écran 16 colonnes et 2 lignes
lcd.print("Salut les Zer0s !");
pinMode(23, OUTPUT);
digitalWrite(23, LOW);
pinMode(25, OUTPUT);
digitalWrite(25, LOW);
pinMode(29, OUTPUT);
digitalWrite(29, LOW);
pinMode(41, OUTPUT);
digitalWrite(41, HIGH);
pinMode(43, OUTPUT);
digitalWrite(43, LOW);
J'ai juste modifié les pinMode pour pouvoir avec un + ou un - sur les broches correspondantes.
Mon écran s'allume mais j'ai une ligne blanche à la place du texte, je ne trouve pas la solution.
Merci

#129
Mike118
-

- Administrateur
-
- 10â¯342 messages
Staff Robot Maker
- Gender:Male
- Location:Anglet
- Interests:Robotique, Entrepreneuriat, Innovation, Programmation, Résolution de problème, Recherche de solutions, Mécanique, Electronique, Créer, Concevoir
Posté 03 juin 2017 - 01:40
je soupçonne une mauvaise connexion ...
Les deux lignes blanches apparaissent quand l'écran est alimenté mais rien n'est envoyé.
As tu relié les pins non utilisé à la masse ?
N'y a t il pas fil débranché ?
Ou bien un décalage et un fil qui n'est pas branché au bon endroit par rapport à ce qui est écrit dans le code ?
Sinon pour info on vend un module LCD I2C qui permet de n'avoir que 4 fils pour relier l'écran LCD et qui simplifie grandement le câblage et l'utilisation =)
Si mon commentaire vous a plus laissez nous un avis ! 
Nouveau sur Robot Maker ?
Jetez un oeil aux blogs, aux tutoriels, aux ouvrages, au robotscope aux articles, à la boutique et aux différents services disponible !
En attendant qu'une bibliothèque de fichiers 3D soit mise en place n'hésitez pas à demander si vous avez besoin du fichier 3D d'un des produits de la boutique... On l'a peut être !
Si vous souhaitez un robot pilotable par internet n'hésitez pas à visiter www.vigibot.com et à lire le sous forum dédié à vigibot!
#130
Donovandu88
-
- Membres
-
- 680 messages
Membre passionné
- Gender:Male
Posté 03 juin 2017 - 05:07
Il est ou le potar pour le contrast ?
Il faut pas relier D0 a D3 au 0V ?
Le potar est remplacé par un signal 5V pour être à fond.
Sur l'Arduino UNO ils n'étaient pas relié à la masse et même sur le bouquin du starter kit d'ailleurs.
je soupçonne une mauvaise connexion ...
Les deux lignes blanches apparaissent quand l'écran est alimenté mais rien n'est envoyé.
As tu relié les pins non utilisé à la masse ?
N'y a t il pas fil débranché ?
Ou bien un décalage et un fil qui n'est pas branché au bon endroit par rapport à ce qui est écrit dans le code ?
Sinon pour info on vend un module LCD I2C qui permet de n'avoir que 4 fils pour relier l'écran LCD et qui simplifie grandement le câblage et l'utilisation =)
J'ai refais plusieurs fois le câblage pourtant. Je ne veux pas acheter de module I2C vu que j'ai encore plein de pins qui ne seront pas utilisés.
#131
Mike118
-
- Administrateur
-
- 10â¯342 messages
Staff Robot Maker
- Gender:Male
- Location:Anglet
- Interests:Robotique, Entrepreneuriat, Innovation, Programmation, Résolution de problème, Recherche de solutions, Mécanique, Electronique, Créer, Concevoir
Posté 03 juin 2017 - 06:20
Normalement tu devrais pouvoir y arriver sans le module I2C , en effet avec une mega tu as suffisament de pins disponible...
Pour moi si tu as deux ligne de caractères blanc le problème doit être code/câblage ...
Après tu peux poster des photo ... sans plus de détails il sera difficile de plus t'aider qu'en faisant des suppositions comme ce que je fais... ( Suppositions qui peuvent être erronées ... )
Si mon commentaire vous a plus laissez nous un avis !
Nouveau sur Robot Maker ?
Jetez un oeil aux blogs, aux tutoriels, aux ouvrages, au robotscope aux articles, à la boutique et aux différents services disponible !
En attendant qu'une bibliothèque de fichiers 3D soit mise en place n'hésitez pas à demander si vous avez besoin du fichier 3D d'un des produits de la boutique... On l'a peut être !
Si vous souhaitez un robot pilotable par internet n'hésitez pas à visiter www.vigibot.com et à lire le sous forum dédié à vigibot!
#132
Donovandu88
-
- Membres
-
- 680 messages
Membre passionné
- Gender:Male
Posté 04 juin 2017 - 07:14
J'ai une ligne blanche sur le dessus.
La photo que je pourrai faire c'est simplement l'écran branché sur l'Arduino, je vais faire des essais en branchant différent sur d'autres pins. Je pense également que c'est une erreur de communication puisque l'alimentation et le rétro éclairage fonctionnes.
#133
levend
-
- Membres
-
- 5â¯726 messages
Pilier du forum
- Gender:Male
- Location:Vendée
- Interests:Robotique, informatique, architecture et patrimoine...
Posté 04 juin 2017 - 07:55
!et si tu mets le "R/W" directement à la masse, ça ne fonctionne pas mieux ?
- Donovandu88 aime ceci
Imprimante 3D : Prusa i3 (MK1) + CR-10S + CR-10 S5 + Artillery Sidewinder X2 + CR-30 + Elegoo Mars + Anycubic Wash & cure 2 + Phrozen Sonic Mega 8K + Phrozen Cure Mega + Tronxy VEHO 600 PRO

#135
levend
-
- Membres
-
- 5â¯726 messages
Pilier du forum
- Gender:Male
- Location:Vendée
- Interests:Robotique, informatique, architecture et patrimoine...
Posté 04 juin 2017 - 09:07
Je me suis posé la question mais je n'ai pas la réponse  .
.
Imprimante 3D : Prusa i3 (MK1) + CR-10S + CR-10 S5 + Artillery Sidewinder X2 + CR-30 + Elegoo Mars + Anycubic Wash & cure 2 + Phrozen Sonic Mega 8K + Phrozen Cure Mega + Tronxy VEHO 600 PRO
#137
Mike118
-
- Administrateur
-
- 10â¯342 messages
Staff Robot Maker
- Gender:Male
- Location:Anglet
- Interests:Robotique, Entrepreneuriat, Innovation, Programmation, Résolution de problème, Recherche de solutions, Mécanique, Electronique, Créer, Concevoir
Posté 04 juin 2017 - 10:10
Est ce que le pin 29 n'est pas utilisé pour autre chose ? Est ce que RW est bien branché sur le pin 29 ? =)
Il serait intéressant de complètement résoudre le problème =)
En tout cas content de savoir que ça marche =)
Si mon commentaire vous a plus laissez nous un avis !
Nouveau sur Robot Maker ?
Jetez un oeil aux blogs, aux tutoriels, aux ouvrages, au robotscope aux articles, à la boutique et aux différents services disponible !
En attendant qu'une bibliothèque de fichiers 3D soit mise en place n'hésitez pas à demander si vous avez besoin du fichier 3D d'un des produits de la boutique... On l'a peut être !
Si vous souhaitez un robot pilotable par internet n'hésitez pas à visiter www.vigibot.com et à lire le sous forum dédié à vigibot!
#138
Donovandu88
-
- Membres
-
- 680 messages
Membre passionné
- Gender:Male
Posté 05 juin 2017 - 09:00
Je pense qui RW était bien branché sur le pin 29 puisque lorsque je l'ai débranché pour le mettre directement à la masse, ça a marché directement. Sur mon Arduino MEGA, j'ai juste un CNC Shield qui est conçu pour un Arduino UNO donc il ne touche pas le pin 29 et le seul autre truc qui est branché directement sur l'Arduino MEGA, c'est le clavier (voir mon schéma).
#139
Donovandu88
-
- Membres
-
- 680 messages
Membre passionné
- Gender:Male




Répondre à ce sujet







Aussi étiqueté avec au moins un de ces mots-clés : bras robot
Projets et réalisations, robots et machines en tout genre →
Bras robots, pinces, tourelles, et autres manipulateurs →
Bras Robot pouvant porter jusqu'à 8Kg ?Débuté par Adri, 09 déc. 2020 |
|

|
||
Découvertes →
Projets collaboratifs →
Bras 6 axes BCN3D Moveo →
BCN3D Moveo et OpenCVDébuté par Kristoff, 22 oct. 2020 |
|

|
||
Découvertes →
Projets collaboratifs →
Bras 6 axes BCN3D Moveo →
Bcn3d firmwareDébuté par theo-paul, 05 juil. 2018 |
|

|
||
Découvertes →
Présentations de produits robotique →
Robots en kits →
Kit bras rotatif et pince robot [testé par mthibs]Débuté par mthibs, 31 mars 2017 |
|
![Kit bras rotatif et pince robot [testé par mthibs] - dernier message par Oracid](https://www.robot-maker.com/forum/uploads/profile/photo-4987.jpg?_r=1471451610)
|
0 utilisateur(s) li(sen)t ce sujet
0 members, 0 guests, 0 anonymous users

